1.本实用新型专利涉及玉米籽粒收获机技术领域,具体来说是一种适用于玉豆间套作的全液压驱动柔性摘穗玉米割台。
背景技术:
2.目前国内玉米
‑
大豆间套作模式中,玉米与大豆的田间配置通常采用两行玉米 2
~
4行大豆的种植模式。玉米收获通常采用窄型两行玉米收获机收获,玉米机收效率低,机收自动化程度不高。由于大豆和玉米植株高度相差较大,作物成熟收获要求不同,很难能采用一种收获机将两种作物同时收获。为提高玉米大豆带状复合种植模式下玉米机收效率,并降低玉米果穗机收损伤率和掉粒率,急需一种适用于玉豆间套作的全液压驱动柔性摘穗玉米割台,以期能更好的推动玉米
‑
大豆种植业的发展。。
技术实现要素:
3.本实用新型的目的在于提供一种全液压驱动的高地隙柔性摘穗割台,实现全液压驱动、控制,柔性摘穗,提高机收效率,降低玉米果穗损伤率和掉粒率。
4.为实现上述目的,本实用新型的技术方案是:
5.一种适用于玉豆间套作的全液压驱动柔性摘穗玉米割台,包括机架,机架上设置有液压马达,机架前方设置的柔性摘穗总成通过传动系统与液压马达相连,摘穗总成上方设置有将玉米茎秆及果穗拨向摘穗总成的拨禾链总成,摘穗总成包括柔性摘穗板总成,柔性摘穗板总成之间设置有玉米茎秆通过的缺口或间隙,柔性摘穗板总成下方设置有向下拉动的玉米茎秆的拉茎辊总成,柔性摘穗总成后方设置有搅龙总成并与其构成输送连接,搅龙总成后方设置有果穗输运装置,搅龙总成下方设有秸秆粉碎装置,搅龙总成轴芯方向水平且垂直于移动方向的,摘穗总成在移动方向的两侧对称布置。割台整体呈“凹”形对称结构,采用双液压马达驱动,并可通过液压控制系统实现割台升降、拉茎辊间距调节、液压马达转速的控制。当联合收获机在田间行走时,使相邻的两个拉茎辊之间的间隙孔对准玉米秸秆,收获机带动拉茎辊向前移动并将玉米秸秆拉进辊间间隙,当玉米果穗与摘穗板接触后,在拉茎辊的阻力作用下驱使玉米果穗脱离秸秆,再利用单链拨禾装置将摘下的玉米向后拨动进入搅龙机构,搅龙机构将玉米果穗向中间聚拢并往后传送到果穗输运装置上。
6.机架上设置有驱使其上下移动的割台提升装置。割台升降装置依靠一对液压油缸完成,在油缸上集成有测距传感器,可测量割台离地高度,并将数据显示到显示器上。当割台需要提升下降时,1ya和12ya(2ya和11ya)同时得到动作信号,油缸开始动作,割台开始上升下降。便于适应不同的玉米高度。
7.所述摘穗总成外侧设置有机体外壳。防止玉米叶杆进入摘穗总成。
8.所述拨禾链总成包括拨禾链条,拨禾链条与收割机的对称中心成前端间距大后部间距小的“八”字形并做收口式运动,柔性摘穗板总成设置在柔性拨禾带“八”字形的后端下方。拉茎辊配合柔性摘穗板,可实现减伤摘穗。单链拨禾装置可以实现超窄行玉米收获。
9.所述拨禾链条前后端分别设置有张紧轮和主动轮,张紧轮与主动轮之间设置有从动轮。
10.所述拉茎辊总成包括辊芯方向与移动方向一致的星型辊体,星型辊体通过辊体固定装置安装在机架上,星型辊体前端为螺旋导头、星型辊体的前段设置有调节两星型辊体间距的拉茎辊调节油缸,所述拉茎辊总成为5齿结构。通过改变液压油缸的行程来调节拉茎辊间距大小。在拉茎辊调节油缸上集成有位移传感器,可以检测油缸行程改变量,并通过中心处理器换算成拉茎辊间距改变量。以左侧拉茎辊调节油缸动作为例,当需要改变拉茎辊间距时,3ya(4ya) 得到动作信号,油缸开始动作,拉茎辊间距减小增大。油缸配备限位装置可以保护拉茎辊与机架不会发生干涉。左右两侧油缸可单独动作,也可同时动作,增加割台的可适性。拉茎辊前端有锥形导头,导头上有螺旋花纹,有助于玉米秸秆进入拉茎辊间隙。两相邻拉茎辊转速相同,转动方向向反。
11.所述柔性摘穗板总成包括板体,板体外侧板沿与机架铰接,板体内侧板沿上设置有笼式柔性缓冲轮,板体下方与机架之间设置有弹簧,板体下方还设置有限位块,所述笼式柔性缓冲轮上覆盖有细钢丝网。当玉米果穗接触到摘穗板后,会压缩弹簧,当玉米果穗受力大于果穗与秸秆间连接力时,玉米果穗会被摘下。当玉米果穗被摘下后,弹簧会复位,并将果穗弹起。玉米果穗在单链拨禾装置作用下向后移动。
12.所述搅龙总成包括搅龙转轴,搅龙转轴上设置有搅龙主体及监测搅龙转速的转速监测传感器。转速监测传感器将监测数据传输给中心处理器,输出到显示器上,以便驾驶人员直观监测割台运转状况。根据搅龙运动状态可分为正常、减速、停止三种工作状态。
13.所述传动系统包括与液压马达相连的安全联轴器、连接对称布置的摘穗总成的双排滚子链。
14.所述秸秆粉碎装置包括刀笼,刀笼的转轴设置有转轴速度监测传感器,转轴通过主动链轮与传动系统相连。通过链传动为秸秆粉碎装置提供动力,转轴速度监测传感器可实时监测转轴速度,当转轴速度急剧降低或突然置零时,发出动力切断信号并停止液压马达运转。
15.可通过中心控制器控制液压系统,并通过位移传感器采集数据,将油缸实际动作转换为数据反映到显示屏上,可实现对液压系统的触摸操控。液压控制系统可控制割台工作模式选择,可实现左右两侧割台分别作业,即单边作业、双边同步作业、双边异步作业,共计三种工作模式。
16.本实用新型的有益效果:实现全液压驱动、控制,柔性摘穗,提高机收效率,降低玉米果穗损伤率和掉粒率。
附图说明
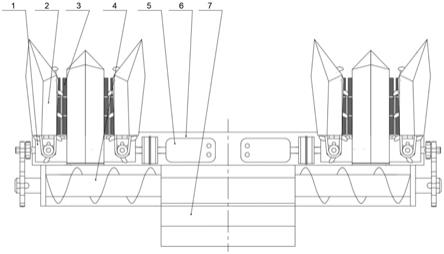
17.图1为本方案俯视图;
18.图2为本方案侧视图;
19.图3为本方案剖视图;
20.图4为本方案柔性摘穗板总成结构示意图;
21.图5为本方案拉茎辊总成结构示意图;
22.图6为本方案搅龙总成结构示意图;
23.图7为本方案粉碎装置结构示意图;;
24.图8为本方案多液压系统示意图
25.图9为本方案多传感器监测系统示意图;
26.1、传动系统;111、安全联轴器;112、双排滚子链;121、第一传动链条,122、第一传动链轮,123、第二传动链轮;2、机体外壳;3、柔性摘穗总成;311、拨禾链主动轮;312、拨禾链张紧轮;313、拨禾链从动轮;314、拨禾链条;321、星型辊体;322、辊体固定装置;323、螺旋导头;324、拉茎辊调节油缸;331、摘穗板支架;332、弹簧安装座;333、笼式柔性缓冲轮;334、弹簧;335、限位块;4、搅龙总成;401、搅龙转轴;402、搅龙主体;403、转速监测传感器; 5、液压马达;6、机架;7、果穗输运装置;8、秸秆粉碎装置;801、刀笼;802、转速监测传感器;803、转轴;804、主动链轮;9、割台升降装置。
具体实施方式
27.下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
28.请参阅图1
‑
9所示,
29.一种适用于玉豆间套作的全液压驱动柔性摘穗玉米割台,包括机架6,机架 6上设置有液压马达5,机架6前方设置的柔性摘穗总成3通过传动系统1与液压马达5相连,摘穗总成3上方设置有将玉米茎秆及果穗拨向摘穗总成3的拨禾链总成31,摘穗总成3包括柔性摘穗板总成33,柔性摘穗板总成33之间设置有玉米茎秆通过的缺口或间隙,柔性摘穗板总成33下方设置有向下拉动的玉米茎秆的拉茎辊总成32,柔性摘穗总成3后方设置有搅龙总成4并与其构成输送连接,搅龙总成4后方设置有果穗输运装置7,搅龙总成4下方设有秸秆粉碎装置8,搅龙总成4轴芯方向水平且垂直于移动方向的,摘穗总成3在移动方向的两侧对称布置。割台整体呈“凹”形对称结构,采用双液压马达5驱动,并可通过液压控制系统实现割台升降、拉茎辊间距调节、液压马达5转速的控制。当联合收获机在田间行走时,使相邻的两个拉茎辊之间的间隙孔对准玉米秸秆,收获机带动拉茎辊向前移动并将玉米秸秆拉茎辊间间隙,当玉米果穗与摘穗板 33接触后,在拉茎辊的阻力作用下驱使玉米果穗脱离秸秆,再利用单链拨禾装置31将摘下的玉米向后拨动进入搅龙机构4,搅龙机构4将玉米果穗向中间聚拢并往后传送到果穗输运装置7上。
30.机架6上设置有驱使其上下移动的割台提升装置9。割台升降装置依靠一对液压油缸9完成,在油缸上集成有测距传感器,可测量割台离地高度,并将数据显示到显示器上。当割台需要提升下降时,1ya和12ya(2ya和11ya)同时得到动作信号,油缸开始动作,割台开始上升下降。便于适应不同的玉米高度。
31.所述摘穗总成3外侧设置有机体外壳2。防止玉米叶杆进入摘穗总成3。
32.所述拨禾链总成31包括拨禾链条314,拨禾链条314与收割机的对称中心成前端间距大后部间距小的“八”字形并做收口式运动,柔性摘穗板总成33设置在柔性拨禾带“八”字形的后端下方。拉茎辊配合柔性摘穗板,可实现减伤摘穗。单链拨禾装置可以实现超窄行玉米收获。
33.所述拨禾链条314前后端分别设置有张紧轮312和主动轮311,张紧轮312 与主动轮311之间设置有从动轮313。
34.所述拉茎辊总成32包括辊芯方向与移动方向一致的星型辊体321,星型辊体321通过辊体固定装置322安装在机架6上,星型辊体321前端为螺旋导头323、星型辊体321的前段设置有调节两星型辊体321间距的拉茎辊调节油缸324,所述拉茎辊总成32为5齿结构。通过改变液压油缸324的行程来调节拉茎辊间距大小。在拉茎辊调节油缸324上集成有位移传感器,可以检测油缸行程改变量,并通过中心处理器换算成拉茎辊间距改变量。以左侧拉茎辊调节油缸动作为例,当需要改变拉茎辊间距时,3ya(4ya)得到动作信号,油缸开始动作,拉茎辊间距减小增大。油缸配备限位装置可以保护拉茎辊与机架6不会发生干涉。左右两侧油缸可单独动作,也可同时动作,增加割台的可适性。拉茎辊前端有锥形导头,导头上有螺旋花纹,有助于玉米秸秆进入拉茎辊间隙。两相邻拉茎辊转速相同,转动方向向反。
35.所述柔性摘穗板总成33包括板体331,板体331外侧板沿与机架铰接,板体331内侧板沿上设置有笼式柔性缓冲轮333,板体331下方与机架6之间设置有弹簧334,板体331下方还设置有限位块335,所述笼式柔性缓冲轮333上覆盖有细钢丝网。当玉米果穗接触到摘穗板33后,会压缩弹簧334,当玉米果穗受力大于果穗与秸秆间连接力时,玉米果穗会被摘下。当玉米果穗被摘下后,弹簧334会复位,并将果穗弹起。玉米果穗在单链拨禾装置31作用下向后移动。
36.所述搅龙总成4包括搅龙转轴401,搅龙转轴401上设置有搅龙主体402及监测搅龙转速的转速监测传感器403。转速监测传感器403将监测数据传输给中心处理器,输出到显示器上,以便驾驶人员直观监测割台运转状况。根据搅龙运动状态可分为正常、减速、停止三种工作状态。
37.所述传动系统1包括与液压马达5相连的安全联轴器111、连接对称布置的摘穗总成3的双排滚子链112。
38.所述秸秆粉碎装置8包括刀笼801,刀笼801的转轴803设置有转轴速度监测传感器802,转轴803通过主动链轮804与传动系统1相连。通过链传动为秸秆粉碎装置提供动力,转轴速度监测传感器502可实时监测转轴速度,当转轴速度急剧降低或突然置零时,发出动力切断信号并停止液压马达运转。
39.可通过中心控制器控制液压系统,并通过位移传感器采集数据,将油缸实际动作转换为数据反映到显示屏上,可实现对液压系统的触摸操控。液压控制系统可控制割台工作模式选择,可实现左右两侧割台分别作业,即单边作业、双边同步作业、双边异步作业,共计三种工作模式。
40.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
41.以上内容仅仅是对本实用新型所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离实用新型或者超越本权利要求书所定义的范围,均应属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

