1.本发明涉及建设作业机械的定位和校正方法,特别涉及可动作业部gnss位置检测的简化和高精度校正。
背景技术:
2.一般而言,以往在土木、建设领域中,在进行整地、铺装等时,作为建设作业机械使用反向铲机。反向铲机也被称为液压挖掘机。近年来,在该反向铲机的操作中,进行机器引导控制、即指定主体的移动或作为上部驱动体(也称为可动作业部或可动作业工具、驱动作业工具)的吊杆、臂、铲斗等的驱动、旋转,并与现场整地形状相匹配地自动控制,或者辅助操作员的操作。为了进行这样的控制,需要准确地掌握铲斗的刃尖的位置(坐标),需要准确地掌握上部回转体(也称为上部旋转体)、吊杆、臂、铲斗等的尺寸和各构件的倾斜角度。
3.另外,在土木、建设领域中,在进行整地、铺装时,作为建设作业机械使用推土机,也大多预先指定而自动地进行该推土机的操作、移动或刮板(推土板)的操作。因此,进行辅助操作员对推土机的操作的机器引导控制。为了进行这样的控制,需要准确掌握刮板刃尖的位置。
4.以下对本发明的主要的建设作业机械及名称进行说明。
5.反向铲机(液压挖掘机)是加工土表面的作业机械,具有将总称为液压挖掘机的建设机械中的铲斗朝向操作员侧安装的方式的特征。朝向操作员侧的铲斗使操作员向拉近(抱住)自己的方向操作。连结有适于在比地表面低的部位进行挖掘的吊杆、臂、铲斗,并且分别包括作为旋转的驱动体的作业工具。
6.推土机是用于砂土的铲起或盛土、整地的建设机械,在拖拉机的前表面安装有可动式的刮板(推土板),包括由刮板(推土板)构成的作业工具,该刮板(推土板)通过从向行进方向推出砂土的机械的两侧延伸的推力臂而上下移动,并向左右旋转。
7.机器引导是指,将建设机械的作业工具的当前位置和设计面显示在驾驶座的监视器上,并且支援操作员顺利且准确地控制机械的系统。
8.为了使这些建设作业机械精度良好地运转,需要定位和校正作业,以精度良好地掌握各旋转或驱动作业工具的位置并向机器引导输入没有误差的数据。
9.在反向铲机中,以往,为了获取倾斜传感器的修正量,通过将吊杆设定为现有的倾斜角度、例如水平,在这种状态下获得倾斜传感器的输出并比较这些输出来进行。然而,在以往的方法中,除了需要其他倾斜角度测量装置来将吊杆设定为现有的倾斜角度、例如水平之外,还需要注意不要因不稳定的姿势而影响角度误差。
10.推土机也是同样的,当配置位置测量装置来设定位置修正量时,能够使用基于设计图等的各构件的尺寸的信息。但是,在这样的现有的反向铲机及推土机中,有时没有该信息,在该情况下,需要准确地测定车体或从车体到吊杆、臂、铲斗、刮板以及对刮板进行支承的连杆(具有框架、推力臂等)等的尺寸。但是,在现场作业中存在不能准确地测定这样的大问题。
system/全球定位卫星系统)接收机(的天线)放置在机体的左右,由此对机体位置和左右倾斜进行测量,并且利用角度传感器来测量机体前后的倾斜。然后,如果是反向铲机,则测量铲斗尖端(前端部)的位置。接着,利用分别安装的角度传感器测量吊杆、臂、铲斗的旋转角度(以下,将全球定位卫星系统表示为“gnss”)。
20.由此,在计算的基础上求出吊杆相对于根部的尖端位置。(参照图1)在分别将旋转驱动的吊杆的长度设为a、臂的长度设为b、铲斗的长度设为c时,根据(acosa bcosb ccosc、asina bsinnb csinc)能明确铲斗尖端(前端部)的坐标位置。接着,将机体位置与使尖端的位置倾斜了机体的倾斜量的位置对准,进行坐标的合成。由此,反向铲机的定位结束。
21.接着,记载了在反向铲机的情况下的以往的具体定位的校正方法。gnss天线的位置首先为了设定吊杆的转轴的中心位置和gnss天线各自的相对位置,将棱镜粘贴于吊杆转轴和各天线,利用全站仪测定其位置,并且根据该测定的位置来设定所述相对值。全站仪(ts)是指设置于基准坐标点,并且在该全站仪与粘贴于定位对象物的棱镜之间使激光往返,通过测量其角度和距离来求出对象物的坐标的光学式测量装置的总称。全站仪以下简称为“ts”。
22.机体运转时的角度由角度传感器规定,该角度传感器首先将机体放置在水平位置,设定角度传感器的水平位置(基准点),并且在运转时测量与该水平位置的差分的角度。
23.然后,通过安装角度传感器来执行作为旋转驱动的驱动作业部的吊杆、臂、铲斗的位置。首先,规定吊杆的长度a、臂的长度b、铲斗的长度c。接着,设定用于确定吊杆的旋转角a、臂的旋转角b、铲斗的旋转角c的基准点。然后,将机体放置在水平面上,将吊杆、臂、铲斗以规定的形式放置在水平面上,将棱镜粘贴于与吊杆、臂、铲斗相关的转轴,并且利用全站仪来测定该位置。
24.基于这样测量的各位置,通过设定转轴之间的水平距离和垂直距离,能够求出a和b,并且通过测量铲斗的长度,能够求出c。将设定于水平位置的部位作为基准点,在运转时通过测量a、b、c,能够对反向铲机的运转时定位进行校正。
25.吊杆、臂、铲斗的角度传感器的以往的校正方法首先使反向铲机的驱动作业工具成为例如使吊杆、臂、铲斗中的每一个向下部方向最大限度地旋转的规定姿势(也称为在水平的位置使作业工具躺下)。然后,将片型棱镜粘贴于吊杆、臂、铲斗的各轴,并且利用ts来测量位置。然后,通过输入各尺寸,能够确定a、b、c并测量a、b、c,从而能够确定a、b、c的基准点并进行校正。
26.接着,对推土机的定位进行说明。对一般众所周知的推土机的刮板(推土板)的位置和姿势进行测量的定位方法存在以下两种。(尽管省略了图,但是能够参照图4。)
27.方法1:将两台gnss接收机(的天线)放置在刮板(推土板)的两端,由此对刮板上的接收机天线的位置进行测量。接着,利用角度传感器对朝向刮板的行进方向的角度变化进行测量(朝向伴随刮板的上下运动而变化)。尽管刮板本身并不是这样运动的,但是由于伴随刮板的上下运动,该面的朝向、进而天线支承杆的角度发生变化,天线位置发生变化,因此,需要识别其角度。然后,结合上述,识别刮板下部的各两端的刃尖位置。此处,根据gnss的位置来掌握刮板左右方向的高度差。
28.方法2:将一台gnss接收机(的天线)放置在刮板(推土板)的中央,由此对刮板上的
接收机天线的位置进行测量。利用角度传感器对朝向刮板的行进方向的角度变化和刮板的左右方向的角度变化进行测量。结合上述,识别刮板下部的各两端的刃尖位置。
29.接着,对推土机中定位的校正进行说明。对于gnss天线的位置,首先对天线和刮板的下部或天线与角度传感器的相对位置进行设定,并且根据gnss接收机、天线及其支承杆以及刮板的大小来设定所述相对位置。或者,将棱镜粘贴于对象位置,并且利用ts进行测量。对于机体的角度,将机体放置在水平位置,并且设定角度传感器的水平位置(基准点)。或者,根据使机体(稍微)前进预定距离时角度传感器的角度的偏位和天线位置的移动,来设定可读传感器的基准位置。运转时,能够通过测量与该水平位置的差分的角度来进行校正。
30.关于反向铲机,也根据以往进行其他的方法。这是代替gnss接收机,将棱镜设置于测定对象物,并且利用ts来测定位置的方法。这是通过液压的行程来测量吊杆、臂、铲斗的旋转识别的方法,如果准确地知道机械结构的话就能测量,但是存在测量结构的部位增加的缺点。但是,不取决于利用gnss还是利用ts来测量机体的位置。
31.如上所述的以往的方法存在很多技术问题。首先,机体尺寸的测量尤其困难且繁杂。例如,棱镜粘贴于多个部位,在各个部位处出现粘贴误差,而且这些误差会累积。另外,虽然是机体的现实的结构上的问题,但是在表面上存在不均匀(凹凸),难以准确地测量水平方向、垂直方向的长度。尤其是,校正时花费的工夫较大且繁杂,需要理解校正方法,一般的使用者(操纵者)不容易广泛地进行。除此以外,校正时机体的水平设置在现场的情况较多,因此在原理上无法要求精度。在工厂出货时,能够利用精密的平均台进行测量,但是在现场的日常使用中难以追求精度。这样,建设机械的定位及校正的制约及技术问题较多,没有从根本上解决上述技术问题。
技术实现要素:
32.本发明是鉴于上述技术问题而完成的,其目的在于,通过使校正所涉及的测定器和定位所涉及的测定器相同,能够使校正简便,并且能够提高校正精度,且能够降低测定器整体所花费的费用。另外,本发明的目的在于提供一种建设作业机械的简易定位及校正方法,包括校正的定位系统能够在之后对现有的机械进行设定,能够通过配置于建筑作业机械的能旋转的驱动作业工具的倾斜传感器以及配置于机体的gnss天线来简单且可靠地获取修正量。
33.具体而言,不是对作业工具的结构本身进行测量,而是对若干姿势进行采样,由此能够推断作业工具的结构,能够共通地应用于反向铲机、推土机等包括旋转式作业工具的机械的校正。并且,本发明的技术问题和目的在于提供一种能够沿用对机械的作业工具的位置进行定位的方法的定位和校正方法。
34.(1)为了解决所述技术问题,在本发明的建设作业机械的定位校正方法中,进行建设作业机械的结构尺寸的测量及校正,该建设作业机械包括:设置于机体并对机体的位置坐标进行测量的第一测量装置;设置于机体并对机体的角度进行检测的角度检测装置;以及设置于可动作业工具并用于一个以上的可动作业工具的角度检测装置,其特征是,为了对所述可动作业工具的多个姿势位置的位置坐标进行测量,在建设作业机械的外部设置第二测量装置,通过所述第二测量装置对所述可动作业工具的多个姿势位置的位置坐标进行
测定,并且使用所述测定出的位置坐标的数据以及由所述可动作业工具的所述角度检测装置检测出的可动作业工具的角度数据,来求出所述可动作业工具的结构尺寸和结构位置。另外,在本技术中,“结构尺寸”是指可动作业工具的两端的转轴的中心之间的距离,或是一端的转轴的中心到刀尖的距离。此外,“结构位置”是指可动作业工具的转轴的中心的位置坐标,或是刀尖的位置坐标。
35.(2)另外,在本发明的建设作业机械的定位校正方法中,具有以下特征:基于所述结构尺寸和所述结构位置,在所述建设作业机械运转时,能够根据由所述机体的所述第一角度检测装置和所述第一测量装置测定的所述机体的运转时位置测定数据及运转时姿势数据、以及由所述可动作业工具的所述角度检测装置测定的运转时角度数据,来定位并求出所述可动作业工具和可动作业工具前端部运转时的所述结构位置和位置坐标。
36.(3)另外,在本发明的建设作业机械的定位校正方法中,具体还具有以下特征:在所述建设作业机械为反向铲机以及所述可动作业工具的形式为与所述反向铲机类似的建设作业机械的情况下,所述可动作业工具是铲斗、臂和吊杆;以及铲斗、臂或吊杆的配件类,在所述建设作业机械为推土机的情况下,所述可动作业工具是刮板,在所述建设作业机械为起重机的情况下,所述可动作业工具为前端挂钩;所述第二测量装置为包括全站仪(ts)的光学式测量装置,将所述可动作业工具作为所述光学式测量装置的测定位置,位置测定在世界测地系统的坐标中进行;所述第一测量装置是gnss接收机(global navigation satellite system/全球定位卫星系统),位置测定在世界测地系统的坐标中进行;基于gnss的测定位置能够通过包括在所述建设工作机械外部的基准基站或卫星信号中的修正信息来修正位置;所述角度检测装置是包括imu(inertial measurement unit,惯性测量装置)的角度传感器。
37.即,在本发明的建设作业机械的定位校正方法及其定位校正控制器中的定位及校正方法中,将作业工具坐标系、机体坐标系和世界定位系统进行整合定位,并且在作业时还通过一点定位对所述整合值进行校正来应用。此外,将包括该方法的控制器及建设机械设为权利范围内。
38.如上所述,本发明的建设作业机械的定位校正方法及其定位校正控制器中的建设作业机械一般是指,不仅包括反向铲机、推土机,还包括起重机、装载机、刮土机、轮式装载机、作业梯车等具有驱动作业工具的建设作业机械。以下,对本发明中的反向铲机和推土机进行具体说明。实施例的详细内容如后所述。
39.(4)在本发明的建设作业机械是反向铲机以及可动作业工具的形式与所述反向铲机类似的建设作业机械的情况下,在通过作为所述第二测量装置的所述光学式测量装置来对本发明的建设作业机械的定位校正方法中的所述可动作业工具的结构尺寸进行位置测定并求出的方法中,具有以下特征:所述可动作业工具的所述测定对象位置是所述铲斗的规定地方,对所述铲斗的所述规定地方的位置进行测定,以作为所述光学式测量装置的所述测定位置,所述可动作业工具的多个所述姿势位置的测定是包括使所述铲斗旋转时的两个部位、使所述臂旋转时的两个部位和使所述吊杆旋转时的两个部位在内的多个部位处的所述规定地方的位置测定,除此以外,使用通过所述多个部位处的位置测定获得的测定值以及通过所述铲斗、所述臂和所述吊杆分别包括的所述角度检测装置而测量的每个所述多个部位处的角度值,来求出所述铲斗、所述臂和所述吊杆中的每一个的长度尺寸。
40.(5)所述建设作业机械是反向铲机以及可动作业工具的形式与所述反向铲机类似的建设作业机械,在通过所述第一测量装置对所述机体的位置坐标进行测定以作为世界测地系统的位置坐标的方法中,所述gnss接收机包括在作为所述机体的上部旋转体的机体主体中,使用利用所述gnss接收机使所述上部旋转体旋转而测量到的任意三个部位的定位值、以及通过所述上部旋转体所包括的所述角度检测装置而测量到的角度值,求出所述上部旋转体的旋转中心位置,以作为所述机体的所述世界测地系统的位置。
41.(6)另外,所述建设作业机械是反向铲机以及可动作业工具的形式与所述反向铲机类似的建设作业机械,其特征是,在通过所述第一测量装置对所述可动作业工具前端部运转时的所述结构位置及所述位置坐标进行定位并求出的方法中,对所述上部旋转体的旋转中心位置进行定位,以作为所述机体的所述世界测地系统的位置坐标,并且根据所述机体的所述世界测地系统位置对作为所述可动作业工具的所述吊杆的旋转中心位置进行定位,以作为所述世界测地系统位置,并且根据所述吊杆的旋转中心位置的所述世界测地系统位置坐标求出所述可动作业工具前端部的位置坐标,以作为世界测地系统位置坐标。
42.(7)然后,在所述建设作业机械是反向铲机以及可动作业工具的形式与所述反向铲机类似的建设作业机械的情况下,在对所述机体中的所述可动作业工具的所述结构位置进行校正的方法中,在对本发明的建设作业机械的定位校正方法中的所述机体中的所述可动作业工具的所述结构位置进行校正的方法中,还具有以下特征:将所述铲斗、所述臂和所述吊杆静置于规定位置,并且对所述可动作业工具的所述铲斗的所述规定地方的位置进行测定,以作为所述光学式测量装置的所述测定位置,通过将所述测定的所述可动作业工具的所述铲斗的所述规定地方的位置坐标、所述吊杆的旋转中心的所述世界测地系统位置坐标、所述机体的所述世界测地系统位置坐标和所述上部旋转体所包括的所述gnss接收机的所述世界测地系统位置整合,来求出所述机体中的所述可动作业工具的结构位置坐标,并且在运转时,以所述求出的结构位置坐标为基准,求出所述机体中的所述可动作业工具的结构位置。
43.(8)在所述建设作业机械是推土机以及可动作业工具的形式与所述推土机类似的建设作业机械的情况下,在通过作为所述第二测量装置的所述光学式测量装置来对本发明的建设作业机械的定位校正方法中的所述可动作业工具的结构尺寸进行位置测定并求出的方法中,具有以下特征:所述可动作业工具的所述测定对象位置是所述刮板的规定地方,对所述刮板的所述规定地方的位置进行测定,以作为所述光学式测量装置的所述测定位置,所述可动作业工具的多个所述姿势位置的测定是使所述刮板沿上下俯仰方向旋转时的两个部位以上和沿滚转方向旋转时的两个部位以上的多个部位处的所述刮板的所述规定地方的位置测定,除此以外,使用通过所述多个部位处的位置测定获得的测定值、通过所述刮板所包括的所述角度检测装置而测量的各个所述多个部位处的角度值,来求出所述刮板的所述框架的长度尺寸和刃尖位置。
44.(9)另外,同样地,在所述建设作业机械是推土机以及可动作业工具的形式与所述推土机类似的建设作业机械的情况下,在通过本发明的建设作业机械的定位校正方法中的所述第一测量装置对所述机体的位置进行测定以作为所述机体的世界测地系统位置的方法中,使用所述机体所包括的所述gnss接收机测量到的定位值和由所述机体所包括的所述角度检测装置所测量到的角度值以及移动值的变化量,求出所述机体的位置坐标和移动方
向,以作为所述世界定位系统位置坐标。
45.(10)此外,在所述建设作业机械是推土机以及可动作业工具的形式与所述推土机类似的建设作业机械的情况下,在通过所述第一测量装置对所述可动作业工具前端部运转时的所述结构位置和位置坐标进行定位并求出的方法中,还具有以下特征:对所述机体的位置进行定位,以作为所述机体的所述世界测地系统位置坐标,并且根据所述机体的所述世界测地系统位置坐标对作为所述可动作业工具的所述框架的旋转中心位置进行定位,以作为所述世界测地系统位置坐标,并且根据所述框架的旋转中心位置坐标的所述世界测地系统位置坐标求出所述刮板刃尖前端部的位置坐标,以作为世界测地系统位置坐标。
46.(11)除此以外,在本发明的建设作业机械的定位校正方法的所述建设作业机械是推土机以及可动作业工具的形式与所述推土机类似的建设作业机械的情况下,在通过所述第一测量装置对所述可动作业工具刃尖前端部的所述结构位置作为世界定位系统位置坐标进行校正的方法中,能将所述刮板静置于一定位置,并且使用所述光学式测量装置来求出所述可动作业工具刃尖前端部的所述棱镜的位置,通过将所述求出的所述驱动作业工具刃尖前端部的所述棱镜的位置、所述框架的旋转中心的所述世界测地系统位置坐标、所述机体的所述世界测地系统位置坐标和所述机体所包括的所述gnss接收机的所述世界测地系统位置的定位值整合,来求出所述机体中的所述可动作业工具的结构位置,并且在运转时,以所述求出的结构位置为基准,求出所述机体中的所述可动作业工具的结构位置。
47.(12)除了如上所述的所述反向铲机和推土机的具体发明事项之外,本发明的建设作业机械的定位校正方法及其定位校正控制器中的建设作业机械不仅能够设为反向铲机、推土机的形式,还能够设为起重机、装载机、刮土机、轮式装载机、作业梯车的形式。此外,在反向铲机中,不仅能够设为铲斗的形式,作为安装于臂前端的配件,还能够设为打桩机、钻头、锤子、抓钳(抓持机)、破碎机(压断机)、刀具或臂扩展部(臂的延伸机)的形式。这些总称为配件类,同样地在臂和吊杆中也存在配件类。这些可以说是本发明的等效论述的对象。
48.因此,本发明涉及的建设作业机械的定位校正方法及其定位校正控制器,准确地说,包括上述记载的建设作业机械的定位校正方法及其定位校正控制器的建设作业机械也包含在本发明中。
49.另外,本发明并不限定于上述方式,能在不脱离本发明的范围内进行各种变更来实施。这些包括等效论述上的对应在内,主张全部为本技术思想的一部分。
50.根据本发明,作为具体效果,只要棱镜粘贴在反向铲机的一个部位、推土机的两个部位甚至一个部位即可,因此粘贴部位减少,另外,粘贴在尖端、刃尖等最终希望求出的位置,因此,校正的准确度很高。另外,在利用ts测量棱镜之后,系统自动计算,因此节省了输入时间,即使在建设现场需要校正的情况下,仅进行上述处置即可,即使不具有基于机械结构的数据设定等专业性,也能够进行校正作业。特别地,在能够自动地进行反向铲机的机体坐标的校正的基础上,能够以将作业工具放置在上方旋转界限处等简单且不费力的处理来准确地执行每天的开始工作时的校正。
51.在精度方面,由于消除了存在多个棱镜粘贴而产生的粘贴误差及其累积,而且也不会影响建设机械的机体结构上的凹凸等,能够沿着坐标系的轴进行测量和校正,因此,精度显著地提高。校正处理不依赖外部机构,而是利用定位系统本身来进行,因此,校正结果可以直接用于定位,校正和定位具有较高的准确度。排除尽可能水平地放置机体这样准确
度较低的方法,通过本机所具有的定位系统,能够进行高精度的校正。除此以外,价格高的gnss接收机和天线仅需一组即可的经济优势也很大。
52.因此,根据本发明,其目的在于,通过使校正所涉及的测定器和定位所涉及的测定器相同,能够使校正简便,并且能够提高校正精度,且能够降低测定器整体所花费的费用。另外,提供一种建设作业机械的简易定位及校正方法,包括校正的定位系统能够之后对现有的机械进行设定,能够通过配置于建筑作业机械的能旋转的驱动作业部的倾斜传感器以及配置于机体的gnss天线来简单且可靠地获取修正量。
53.具体而言,根据本发明,通过使校正所涉及的测定器和定位所涉及的测定器相同,能够使校正简便,并且提高校正的精度。另外,能够提供一种定位和校正方法,能够降低测定器整体所花费的费用,并且包括校正的定位系统能够之后对现有的建设作业机械进行设定。
附图说明
54.图1是示出一般建设作业机械的定位和校正方法中的反向铲机整体的形态的立体概念图。图2是示出一般建设作业机械的定位和校正方法中的推土机整体的形态的立体概念图。图3是示出本发明的一个实施方式的包括建设作业机械的定位校正方法及其定位校正控制器的建设作业机械的反向铲机整体的坐标系的形态的立体概念图。图4是示出本发明的一个实施方式的包括建设作业机械的定位校正方法及其定位校正控制器的建设作业机械的推土机整体的坐标系的形态的立体概念图。图5是示出本发明的一个实施方式的包括建设作业机械的定位校正方法及其定位校正控制器的建设作业机械的机体坐标系的设定和校正的形态的概念图。图6是示出本发明的一个实施方式的包括建设作业机械的定位校正方法及其定位校正控制器的建设作业机械的机体坐标系的设定和校正的形态的概念图。图7是示出本发明的一个实施方式的包括建设作业机械的定位校正方法及其定位校正控制器的建设作业机械的棱镜粘贴位置的形态的概念图。图8是示出本发明的一个实施方式的包括建设作业机械的定位校正方法及其定位校正控制器的建设作业机械的反向铲机驱动作业工具的运动的形态的概念图。图9是示出本发明的一个实施方式的包括建设作业机械的定位校正方法及其定位校正控制器的建设作业机械的反向铲机驱动作业工具的运动的形态的概念图。图10是示出本发明的一个实施方式的建设作业机械的定位校正方法及其定位校正控制器的建设作业机械的推土机的机体坐标系设定的形态的概念图。图11是示出本发明的一个实施方式的包括建设作业机械的定位校正方法及其定位校正控制器的建设作业机械的推土机的棱镜粘贴位置的概念图。图12是示出本发明的一个实施方式的包括建设作业机械的定位校正方法及其定位校正控制器的建设作业机械的推土机的刮板的动作的形态的概念图。图13是示出本发明的一个实施方式的包括建设作业机械的定位校正方法及其定位校正控制器的建设作业机械的推土机的刮板的动作的形态的概念图。
图14是示出本发明的一个实施方式的包括建设作业机械的定位校正方法及其定位校正控制器的建设作业机械的推土机的刮板的动作的形态的概念图。图15是示出本发明的一个实施方式的包括建设作业机械的定位校正方法及其定位校正控制器的建设作业机械的推土机的刮板的动作的形态的概念图。图16是示出本发明的一个实施方式的包括建设作业机械的定位校正方法及其定位校正控制器的建设作业机械的推土机的动作的形态的概念图。图17是示出本发明的一个实施方式的包括建设作业机械的定位校正方法及其定位校正控制器的建设作业机械的推土机的刮板的动作的形态的概念图。符号说明1
ꢀꢀ
反向铲机2
ꢀꢀ
推土机3
ꢀꢀ
世界测地系统(绝对坐标系)4
ꢀꢀ
机体坐标系5
ꢀꢀ
作业工具坐标系(驱动作业机坐标系)6
ꢀꢀ
全站仪(ts)10
ꢀꢀ
操纵座11
ꢀꢀ
上部旋转体(机体主体)12
ꢀꢀ
吊杆13
ꢀꢀ
臂14
ꢀꢀ
铲斗15
ꢀꢀ
下部移动体(履带)16
ꢀꢀ
gnss((global navigation satellite system/全球定位卫星系统)全球定位卫星系统)接收机(天线)17
ꢀꢀ
倾斜角度传感器(倾斜传感器)18
ꢀꢀ
控制器19
ꢀꢀ
控制盒20
ꢀꢀ
gnss基站21
ꢀꢀ
上部机体主体22
ꢀꢀ
刮板23
ꢀꢀ
框架24
ꢀꢀ
刮板刃尖25
ꢀꢀ
铲斗尖端30
ꢀꢀ
由三轴加速度传感器和三轴陀螺仪传感器构成的imu(inertial measurement unit,惯性测量装置)31
ꢀꢀ
转轴32
ꢀꢀ
棱镜33
ꢀꢀ
机体上部。
具体实施方式
55.以下,参照附图对本发明的实施方式进行说明。另外,以下示意性地示出用于实现本发明的目的的说明所需要的范围,并且主要对本发明的相应部分的说明所需的范围进行说明,省略说明的部位是公知技术。
56.图1是示出一般建设机械的校正方法、定位方法及内置有这些的建设机械的反向铲机整体的形态的立体概念图。如该图所示,由包括作为建设机械的反向铲机1的操纵座10在内的上部旋转体(机体主体)11、作为驱动作业工具的吊杆12、臂13、铲斗14以及作为履带的下部移动体15构成。
57.在上部旋转体11的背部安装有gnss接收机(天线)16,在吊杆12、臂13、铲斗14和上部旋转体11的背部分别安装有作为倾斜角传感器17的倾斜传感器。在操纵座10设置有作为液晶画面的控制器18和控制盒19。此外,在外部还存在gnss基站20。
58.图2是示出一般建设机械的校正方法、定位方法及内置有这些的建设机械的推土机的形态的立体概念图。如该图所示,由包括作为建设机械的推土机2的操纵座10的上部机体主体21、作为驱动作业工具的刮板(推土板)22、使刮板22移动的框架23、以及作为履带的下部移动体15构成。
59.在刮板22的两端安装有gnss接收机(天线)16,刮板22的大致中央部安装有作为倾斜角传感器17的倾斜传感器。在操纵座10设置有作为液晶画面的控制器18和控制盒19。此外,在外部还存在gnss基站20。
60.首先,对坐标系进行说明。
61.gnss的坐标系是世界测地系统(绝对坐标系)的坐标系,在坐标系中表示地球上的各地点。将天顶设为z轴、将北设为x轴、将东设为y轴来进行表示。最终,要求在该世界测地系统中求出作为建设机械的反向铲机铲斗尖端、推土机2的刮板刃尖24的位置。建筑机械的施工现场的设计表面是世界测地系统的坐标系(一般而言坐标系是右螺旋系,而世界测地系统是左螺旋系)。
62.建设机械的机体坐标系是机体主体的坐标系,反向铲机1将上部旋转体(包括操纵座)11的转轴设为机体主体11的坐标系,并且推土机2也将包括操纵座在内的上部设为机体主体21的坐标系。这些坐标系将天顶设为z轴、将前方设为x轴、将从操纵座10的左方向设为y轴,但是在与世界测地系统(绝对坐标系)的定位中,仅转换轴名。
63.驱动的作业工具坐标系与机体坐标系相关联。即,反向铲机1的吊杆12、臂13、铲斗14的坐标系和推土机2的刮板22的坐标系与机体坐标系相关联,同时换算成世界测地系统(绝对坐标系)来定位。
64.接着,对反向铲机的具体实施例进行说明。
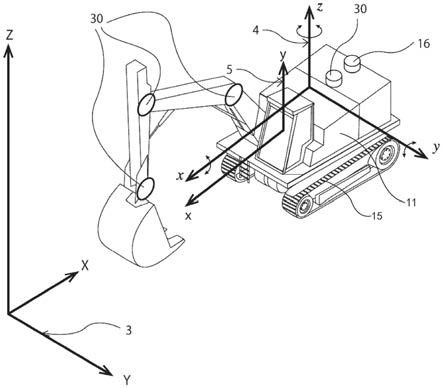
65.图3是示出本发明的一个实施方式的内置有建设作业机械的定位校正方法及其定位校正控制器的建设机械的反向铲机整体的坐标系的形态的立体概念图。如该图所示,在上部旋转体11上设置有一组天线和gnss接收机16。天线设置在远离上部旋转体11的转轴的部位。gnss接收机16和天线也可以是一体型的。在上部旋转体11上设置有由三轴加速度传感器和三轴陀螺仪传感器构成的imu(inertial measurement unit,惯性测量装置)30。(之后,将由三轴加速度传感器和三轴陀螺仪传感器构成的imu(inertial measurement unit,惯性测量装置)简称为“imu”来描述。
66.imu是包括加速度传感器、陀螺仪传感器(=陀螺仪=角速度传感器)并对加速度和角速度进行测量的装置,由此识别位置和姿势。角度传感器是专门用于检测imu中的旋转角度的检测的装置,对角速度进行积分,并且求出旋转角度。此时,能够利用加速度传感器对重力加速度进行检测,以抵消角度检测的漂移(偏移)。在本技术中,imu定义并记载为包含角度传感器的概念。当然,倾斜传感器等也是同样的。即,本技术将角度传感器包含在imu中。
67.在吊杆12、臂13、铲斗14中的每一个设置有同样的imu。(当吊杆12、臂13、铲斗14的旋转面从铅锤倾斜的量变少、尖端25的位置精度不严格时,也可以装设由一轴加速度传感器和一轴陀螺仪构成的imu。此时,以下所说明的运算仅处理一轴旋转。)
68.首先,如下所述进行作为初始校正的机体坐标系的设定。例如,该设定也可以在设置测量装置或工厂出货时进行。图5是示出本发明的一个实施方式的建设机械的校正方法、定位方法以及内置有这些的建设机械的机体坐标系的设定和校正的形态的概念图。参照图3和图5进行说明。
69.·
如图3所示,通过使下部移动体15静止,使上部旋转体11旋转,同时使gnss天线16稳定的时间静止,在三个部位处对世界测地系统中的gnss天线16的位置p1、p2、p3进行测量(参照图5)。旋转时,在imu30处对p1、p2、p3中的每一个之间的旋转角进行测量(通过对imu的陀螺仪传感器的角速度进行积分来测量)。
70.·
在p1p2p3平面上,能够根据由各两点和其间的角度确定的等腰三角形来求出旋转中心。将所求出的三个旋转中心的平均位置作为旋转中心并设为机体坐标系4的原点o。当三个旋转中心的偏差较大时,可以通过增加测量点并稳定误差的测量点数来求出。对于世界测地系统中的gnss天线16的位置p1、p2、p3的测定方法并没有限定,例如也可以将棱镜粘贴于gnss天线,通过全站仪(ts)6在三处测定世界测地系统中的gnss天线16的位置p1、p2、p3。对于机体坐标系4的原点o的求出方法并没有特别限定,例如也可以在p1p2p3平面上,将与gnss天线16的位置p1、p2、p3等距离的点作为机体坐标系4的原点o。
71.·
将p1p2p3平面设为机体坐标系的xy平面。其中,将与后述的作业工具坐标系5的水平旋转面平行的轴设为x。(这也可以是将x轴、y轴设定为任意的正交方向来转换坐标系的方法。)将天顶方向设为z。
·
由此确定机体坐标系4中的gnss天线16的位置
·
在相同状态下,将imu30的当前状态保持为imu30的原姿势。即,保持imu加速度传感器的重力加速度的方向。
72.接着,进行机体运转时的测量。
73.图6是示出本发明的一个实施方式的内置有建设作业机械的定位校正方法及其定位校正控制器的建设机械的机体坐标系的设定和校正的形态的概念图。参照图3和图6进行说明。
74.·
在gnss天线与gnss16的位置偏离的情况下,通过gnss基站20和gnss16来掌握天线的位置。
·
根据机体坐标系4中的gnss天线16的位置以及基于imu30的姿势识别,来识别机体坐标系4和世界测地系统3的相对位置。这能够根据三维各轴处的旋转来识别姿势从原姿
势的相对运动。
·
掌握机体坐标系4的原点的世界测地系统处的位置、机体坐标系4和世界测地系统3的各轴的旋转角。基于imu30的姿势偏移能够通过将各轴的陀螺仪传感器的角速度值从原姿势的值开始积分来获得。
·
以上作为机体坐标系4和世界测地系统3的坐标转换运算而预先准备。
75.运转时的再校正在原点o静止而机体的下部移动体15没有移动时,在能够稳定地获取两个以上部位的天线位置时,对imu30的原姿势进行再设定,并且之后,能够识别从该姿势的相对运动。
76.[实施例]以下,对作业工具坐标系的设定和校正进行说明。
[0077]
图7是示出本发明的一个实施方式的建设机械的校正方法、定位方法以及内置有这些的建设机械的棱镜粘贴位置的形态的概念图。图8是示出本发明的一个实施方式的内置有建设作业机械的定位校正方法及其定位校正控制器的建设机械的反向铲机驱动作业工具的动作的形态的概念图。使用图7和图8,对驱动作业工具(吊杆12、臂13、铲斗14)坐标系5的设定和校正进行说明。
[0078]
(实施例1)首先,进行驱动作业工具的旋转测量。这是继续进行机体坐标系的设定和校正的操作。如图7所示,例如,将棱镜把持于铲斗尖端25,并且通过全站仪(ts)6来测量尖端的世界测地系统坐标3。测量从反向铲机的侧面进行。由于从ts以相同深度仅测量横向位置,因此能够期待精度的稳定。
[0079]
·
如图8所示,使吊杆12、臂13固定,并且使仅铲斗14旋转,在世界测地系统中测定铲斗尖端25的2p
i
。
·
使臂13旋转,并且进行上述操作。测定点共计四点。
·
接着,使吊杆12旋转,并且重复上述操作。测定点共计八点。
·
对吊杆12、臂13、铲斗14在上方旋转界限处的o2、o3、p
i
进行测定并求出(也可以与p8共用)。将其设为作业工具的原姿势。
[0080]
·
根据上述八点以上来确定吊杆12、臂13、铲斗14的旋转面。
·
在旋转面上,根据p8、p7和旋转角δ4,求出作为等腰三角形的顶点的o
34
和铲斗的长度l3。
·
以下同样地求出吊杆旋转中心o1、吊杆的长度l1、臂的长度l2、铲斗的长度l3。在各值误差不稳定的情况下,可以增加测定点数。对吊杆12、臂13、铲斗14的旋转中心和吊杆的长度l1、臂的长度l2、铲斗的长度l3的求出方法并没有特别限定。例如,将吊杆12、臂13固定,仅旋转铲斗14,在世界测地系统中测定铲斗尖端25的3p
i
,在吊杆12、臂13、铲斗14的旋转面上,在将与这三个点等距离的点作为铲斗的旋转中心的基础上,铲斗的旋转中心与3p
i
之间的距离可以作为铲斗的长度l3。以下同样地求出吊杆旋转中心o1、吊杆的长度l1和臂的长度l2。
[0081]
·
接着,在机体坐标系4中,确定吊杆12的旋转中心o1、吊杆12、臂13、铲斗14的旋转面。校正时,由于在世界测地系统3中求出了机体坐标系4和这些值,因此能够进行匹配。
·
将以吊杆12的旋转中心o1为原点、以与机体坐标系4的xy平面平行且朝向铲斗
14的轴为x、以与之垂直且天顶方向的轴为y的坐标系设为作业工具坐标系5(也可以将x轴、y轴设定为任意的正交方向来转换坐标系)。
[0082]
·
求出在作业工具坐标系5中的、图8所示的上方旋转界限处的o2、o3、p
i
的值。能够在运转时的校正中使用。该坐标系的设定可以是低频率的。也可以与机体坐标系4的设定相同地进行。机体坐标系4和作业工具坐标系5的设定和校正也可以在机体或旋转工具产生机构性的误差或失真而这些误差或失真累积时再次进行。这些能够在作业现场进行。
[0083]
以上,通过进行本发明的一个实施方式的建设机械的校正方法、定位方法,能够在现场简易地进行建设机械运转时的测量和校正。机体运转时的测量如下。
·
对吊杆12、臂13、铲斗14的各旋转进行测定,并且求出作业工具坐标系5中的铲斗尖端25的位置。
·
从作业工具坐标系5转换为机体坐标系4,求出机体坐标系4中的铲斗尖端25的位置。
·
根据gnss天线16的位置、由imu30识别出的机体的旋转,从机体坐标系4转换为世界测地系统3,求出世界测地系统3的铲斗尖端25的位置。
[0084]
机体运转时的校正如下。图9是示出本发明的一个实施方式的建设作业机械的定位校正方法及其定位校正控制器的反向铲机驱动作业工具的动作的形态的概念图。参照图9进行说明。
·
在机械起动时,如图9所示,使吊杆12、臂13、铲斗14在上方旋转界限静止,并且将各个点设定为o2、o3、p
i
。
·
在imu的角度识别的误差累积的情况下,进行上述的再设定。例如,通过事先评估掌握误差累积的时间,由此也能促使操纵者进行再设定。
[0085]
(实施例2)下面,对推土机的实施例进行说明。
[0086]
图4是示出本发明的一个实施方式的建筑作业机械的定位校正方法及其定位校正控制器的推土机整体的坐标系的形态的立体概念图。如该图所示,在机体上设置有一组gnss接收机16和天线(如该图所示,gnss接收机16和天线也可以是一体型的)。在机体上设置有由三轴加速度传感器和三轴陀螺仪传感器构成的imu(inertial measurement unit,惯性测量装置)30。这些载置于机体上的上部机体主体21。
[0087]
如图4所示,在刮板(推土板)22上设定有同样的imu。刮板的运转结构基于机体中央部附近的转轴,使框架(推力臂)23旋转,刮板22整体上下运动(将该动作称为俯仰)。此外,刮板以改变刮板22的左右高度的方式旋转(将该动作称为滚转)。虽然也存在刮板22的左右沿前后的旋转(将该动作称为横摆),但在一边前进一边排土这样的推土机2的特性上,可以不考虑该旋转。
[0088]
首先,对机体坐标系4的设定和校正进行说明。
[0089]
图10是示出本发明的一个实施方式的内置有建设作业机械的定位校正方法及其定位校正控制器的建设作业机械的推土机的机体坐标系设定的形态的概念图。如该图所示,设定作为旋转台的辅助器具。即,在推土机的情况下,上部机体主体21不旋转。
[0090]
在上部机体主体21上载置作为辅助器具的旋转台(图10中仅示出了旋转台的动作)。通过设置gnss接收机16的天线并使旋转台旋转来在多个部位处执行接收。旋转台设置
成沿左右旋转60度或120度左右。
[0091]
对初始校正和机体坐标系的设定进行说明。该初始校正例如也可以在测量装置的设置时或者工厂出货时进行。
[0092]
·
使机体静止,使旋转台旋转,同时使gnss天线16稳定的时间静止,在三个部位处对世界测地系统3中的天线位置p1、p2、p3和imu的旋转角进行测量。计算与反向铲机相同(当然在机体作业时固定于一个部位)。
·
将p1p2p3平面设为机体坐标系4的xy平面。其中,将与后述的作业工具坐标系5的俯仰旋转面平行的轴设为x(也可以将x轴、y轴设定为任意的正交方向,来转换坐标系)。将天顶方向设为z。由此确定机体坐标系4中的天线位置
·
在相同的状态下,将imu30的当前状态保持为imu的原姿势。即,保持imu加速度传感器的重力加速度的方向。
[0093]
对机体坐标系的使用进行说明。
[0094]
机体运转时的测量与反向铲机相同。运转时的再校正使o静止(当机体下部没有移动时),使旋转台旋转以稳定地获取两个以上部位的天线位置,并且对imu的原姿势进行再设定,之后,识别从该姿势的相对运动。
[0095]
对推土机2的作业工具坐标系5的设定和校正进行说明。图11是示出根据本发明的一个实施方式的建设机械的校正方法、定位方法以及内置有这些的建筑机械的推土机的棱镜粘贴位置的形态的概念图。图12是示出本发明的一个实施方式的内置有建设作业机械的定位校正方法及其定位校正控制器的建设作业机械的推土机的刮板的动作的形态的概念图。图13也是示出本发明的一个实施方式的建设作业机械的定位校正方法及其定位校正控制器的推土机的刮板的动作的形态的概念图。
[0096]
首先,参照图11、图12和图13,进行作为运转作业工具的刮板22的俯仰和滚转的旋转测量。在刮板22的下边两端把持棱镜,并且通过全站仪(ts)来测定棱镜位置的世界测地系统坐标3。
[0097]
·
通过推力臂23使俯仰固定,使刮板22滚转,并且在世界测地系统3中测定刮板两端的变化点p
1r
、p
2r
及p
1l
、p
2l
等。
·
求出p
1r
、p
2r
和p
1l
、p
2l
的旋转面。
·
在旋转面上,根据p
1r
、p
2r
和旋转角δ1,求出作为等腰三角形的顶点的o
21
和刮板上的长度l2。
·
同样地,根据p
1l
、p
2l
和旋转角δ1,求出长度l3·
使推力臂旋转(俯仰),并且与上述同样地进行两次
·
根据o
21
、o
22
、o
23
,求出俯仰旋转面
·
根据o
21
、o
22
、o
23
,求出作为两个等腰三角形的顶点的o1和推力臂的长度l3。
·
测定并求出俯仰上方界限处的o2、滚转中的任一个界限处的p
i
(也可以与p
4r
或p
3l
共用),并且将其作为作业工具的原姿势。在各值误差不稳定的情况下,可以增加测量点数。如果预计刮板相对于滚转中心左右对称,则棱镜也可以在单侧为一个。此时,每个滚转的p取3个,并且在其平面上求出o2。推力臂23和刮板22的旋转中心的求出方法并没有特别限定。例如,也可以利用推力臂23固定俯仰,使刮板22滚转,在世界测地系统中测定三点的刮板端的变化点,将该旋转
面上与各三点等距离处的点作为刮板的旋转中心o
21
等。同样地,也可以将o
21
、o
22
、o
23
的俯仰旋转面上与o
21
、o
22
、o
23
等距离的点作为推力臂23的旋转中心o1。
[0098]
对作业工具坐标系5的设定进行说明。
[0099]
·
在机体坐标系中,求出推力臂23的旋转中心o1和俯仰旋转面。校正时,由于在世界测地系统3中求出了机体坐标系和这些值,因此能进行匹配。
·
将由以o1为原点、与机体坐标系的xy平面平行且朝向刮板的滚转中心的轴为x、与之垂直且天顶方向的轴为z、以右螺旋系确定的y轴构成的坐标系设为作业工具坐标系(也可以将x轴、y轴设定为任意的正交方向,来转换坐标系)。
·
求出作业工具坐标系5中的、上方旋转界限处的o2、p
i
的值。这是因为能在运转时的校正中使用。
·
该坐标系的设定可以是低频率的(可以与机体坐标系的设定相同地进行)。
·
机体坐标系4和作业工具坐标系5的设定和校正也可以在机体或旋转工具产生机构性的误差或失真而这些误差或失真累积时再次进行。能够在作业现场进行。
[0100]
对推土机的机体运转时的测量进行说明。
[0101]
·
测量俯仰、滚转的各旋转,并且求出作业工具坐标系中的刮板两端的刃尖位置。
·
从作业工具坐标系5转换为机体坐标系4,求出机体坐标系4中的刮板两端的刃尖24的位置。
·
根据gnss天线16的位置以及由imu识别出的机体的旋转,从机体坐标系4转换为世界测地系统3,求出世界测地系统中的刮板两端的刃尖24的位置。
[0102]
接着,对推土机的机体运转时的校正进行说明。图14是示出根据本发明的一个实施方式的建设机械的校正方法、定位方法以及内置有这些的建筑机械的推土机的刮板的动作的形态的概念图。
·
如图14所示,在机械起动时,使推力臂23、刮板22在上方旋转界限处静止,并且将各个点设定为o2、p
i
。
·
在imu的角度识别的误差累积的情况下,进行上述的再设定。例如,通过事先评估掌握误差累积的时间,由此促使操纵者进行再设定。
[0103]
除此以外,之后,对推土机的作业工具坐标系的设定和校正的其他实施例进行说明。由于推土机的机体上部不旋转,因此,机体坐标系与作业工具坐标系能够作为一体进行处理,从而在作业工具坐标系的设定中,gnss天线的位置也在该坐标系中被确定。即,机体坐标系的设定被取入作业工具坐标系的设定中。因此,之后使机体前进等,根据此时的天线位置的变化和imu检测出的加速度及角度的偏差,能够判定imu的姿势。在机体运转时,根据天线位置和imu的姿势来掌握作业工具坐标系的绝对位置(世界测地坐标系),进而,通过刮板的imu来识别刮板的姿势,由此能够识别刮板刃尖的坐标。
[0104]
图15是示出本发明的一个实施方式的包括建设作业机械的定位校正方法及其定位校正控制器的建设作业机械的推土机的刮板的动作的形态的概念图。下面使用该图15和图12进行表示。
[0105]
首先,对作为作业工具的刮板22的俯仰和滚转进行旋转测量。
[0106]
·
使推力臂(框架)23的俯仰固定,并且使刮板22滚转,并且在世界测地系统中测定刮板两端的变化点p
1r
、p
2r
和p
1l
、p
2l
等。
·
求出p
1r
、p
2r
和p
1l
、p
2l
的旋转面。
·
接着,在旋转面上,根据p
1r
、p
2r
和旋转角δ1,求出作为等腰三角形的顶点的o
21
和刮板上的长度l2。
·
同样地,根据p
1l
、p
2l
和旋转角δ1,求出长度l3·
使推力臂(框架)23旋转(俯仰旋转),并且与上述同样地再进行一次。
·
在与刮板的滚转旋转面正交的平面上,根据o
21
、o
222
以及旋转角度θ1求出作为两个等腰三角形的顶点的o1和推力臂的长度l1。在各值误差不稳定的情况下,可以增加测量点数。为了测量作业工具的原姿势,只要测定并求出俯仰上方界限处的o2、滚转中的任一个界限处的p
i
即可。也可以与p
4r
或p
3l
共用。推力臂(框架)23和刮板22的旋转中心的求出方法并没有特别限定。例如,也可以利用推力臂23固定俯仰,使刮板22滚转,在世界测地系统中测定三点的刮板端的变化点,将该旋转面上与各3点等距离的点作为刮板的旋转中心o
21
等。也可以使推力臂(框架)23旋转(俯仰旋转),与上述同样地,将与已进行两次而求出的刮板旋转中心o
21
、o
22
、o
23
等距离的刮板的滚转旋转面正交的平面上的点作为推力臂(框架)23的旋转中心o1。
[0107]
接着,对作业工具坐标系的设定进行说明。
[0108]
以o1为原点。在与刮板滚转面正交地设定的刮板俯仰面上,将由以与imu的重力加速度的方向正交且从o1朝向刮板的轴为x、以与之垂直且天顶方向的轴为z、以由右螺旋系确定的y轴构成的坐标系设为作业工具坐标系。也可以与重力加速度无关地将刮板俯仰面上的任意轴设为x轴。将设定作业工具作业系统时测定的gnss的天线位置(世界测地系统)在作业工具坐标系中也确定为作业工具坐标系中的位置。
[0109]
对作业工具原始姿势的设定进行说明。
[0110]
如图14及图15(参照图17)所示,求出上方旋转界限处的o2、p
i
(世界测地系统)的、在作业工具坐标系中的值。将这设为作业工具的原姿势(之后,在运转时校正中使用)。在运转时,在由于角度测量的反复而误差累积的情况下,重新进行上方旋转界限区域中的作业工具原姿势的设定。
[0111]
作业工具坐标系的设定可以是低频率的。例如,也可以在出货时或安装作为测定设备的gnss和imu时。作业工具坐标系的设定和校正也可以在机体或旋转工具产生机构性的误差或失真而这些误差或失真累积时再次进行。能够在作业现场进行的优点较大。
[0112]
对imu的姿势设定(初始设定)进行说明。
[0113]
图16是示出本发明的一个实施方式的包括建设作业机械的定位校正方法及其定位校正控制器的建设作业机械的推土机的动作的形态的概念图。参照该图进行说明。
·
使机体静止来掌握上部机体主体21的gnss天线位置和imu的角度信息。
·
使机体移动规定距离(例如向前方移动3m,为了抑制误差而而尽量在直线上)来掌握gnss天线位置、以及至移动为止的imu的加速度信息和角度信息。
·
根据起动地点和到达地点的位置信息(基于gnss的世界测地系统坐标)、以及imu的移动所涉及的加速度的变化和角速度的变化,计算到达地点处的机体的移动方向。
·
能够根据该移动方向的矢量和imu检测出的重力加速度的矢量来确定imu的姿
势。
·
在运转时的定位中,以该imu的姿势为机体的原姿势,以其作为基准,根据其角度变化,识别定位时的姿势。
[0114]
对运转时再校正进行说明。
[0115]
·
从基准姿态的角度变化的姿势识别会使漂移(由于计算的重叠而使误差累积)发生。由于机体在运用上经常停止,因此,在连续进行直线移动且稳定的停止的时间点,重复进行上述设定,并且对imu的基准姿势进行再设定即可。
[0116]
对机体运转时测量进行说明。
[0117]
图17是示出本发明的一个实施方式的包括建设作业机械的定位校正方法及其定位校正控制器的建设作业机械的推土机的刮板的动作的形态的概念图。使用该图进行说明。
·
通过刮板的imu,测定俯仰、滚转的各旋转,并且通过从作业工具原姿势的变化,求出在作业工具坐标系中的刮板两端的刃尖位置。
·
从作业工具坐标系转换为机体坐标系,求出机体坐标系中的刮板两端的刃尖位置。
·
根据gnss天线的位置、imu从机体的原姿势的角度变化、以及刮板两端在作业工具坐标系中的刃尖位置,将机体坐标系转换为世界测地系统而求出在世界测地系统中的刮板两端的刃尖位置。
[0118]
对机体运转时校正进行说明。参照图17。
[0119]
·
在机器起动时,使推力臂、刮板在上方旋转界限处静止,并且将各个点设定为o2、p
i
。
·
在刮板的imu的角度识别的误差累积的情况下,进行上述的再设定。例如,可以通过事先评估掌握误差累积的时间,由此促使操纵者进行再设定。
[0120]
根据以上,根据本发明的一个实施方式的建设作业机械的定位校正方法及其定位校正控制器,能够得到如下效果。
·
棱镜在反向铲机中设置一个部位、在推土机中设置两个部位甚至一个部位即可。
·
粘贴部位减少,另外,粘贴于尖端、刃尖这样的最终希望求出的位置,因此校正的准确度较高。
·
在利用ts测定棱镜之后,系统自动计算,因此节省了输入时间。
·
即使在建设现场需要校正的情况下,仅进行上述的处置即可,即使不具有基于机械结构的数据设定等专业性,也能够进行校正作业。
·
能够自动地进行反向铲机的机体坐标的校正。
·
能够以将作业工具放置在上方旋转界限处等简单且不费力的处理来准确地执行每天的开始工作时的校正。
·
对于精度,消除了粘贴有多个棱镜而导致的粘贴误差及其累积。
·
由于能够不受机体的结构上的凹凸等的影响而进行沿坐标系的轴的测量和校正,因此精度提高。
·
校正处理不依赖外部机构,只要利用ts测量多个部位并另外设定其长度等即
可,而且利用定位系统本身来进行,因此,校正结果可以直接用于定位,校正和定位的准确度较高。
·
排除尽可能水平地放置机体这样准确度较低的方法,通过本机所具有的定位系统,能够进行高精度的校正。
·
由于gnss和天线仅需一组即可,因此能够以低价的系统来实现。
[0121]
另外,本发明并不限定于上述实施方式,能在不脱离本发明的主旨的范围内进行各种变更来实施。所有这些都是本技术思想的一部分。工业上的可利用性
[0122]
根据本发明,其目的在于,通过使校正所涉及的测定器和定位所涉及的测定器相同,能够使校正简便,并且能够提高校正精度,且能够降低测定器整体所花费的费用。另外,能提供一种建设作业机械的简易定位及校正方法,包括校正的定位系统能够之后对现有的机械进行设定,能够通过配置于建筑作业机械的能旋转的驱动作业部的倾斜传感器以及配置于机体的gnss天线来简单且可靠地获取修正量。
[0123]
具体而言,根据本发明,通过使校正所涉及的测定器和定位所涉及的测定器相同,能够使校正简便,并且提高校正的精度。另外,能够提供一种定位和校正方法,能够降低测定器整体所花费的费用,并且包括校正的定位系统能够之后对现有的建设作业机械进行设定。
[0124]
根据本发明,在建设机械的定位及校正中,实现了能显著地提高作业的安全性和作业性,并且也显著地提高经济效率的定位及校正。本发明无论其作业现场如何都能加以利用、应用。因此,本技术对于伴随着建设业、土木业的各种产业带来了巨大的有益性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。