1.本发明涉及作业机械,特别是涉及在信息化施工中进行施工现场的当前地形测量、自身位置及姿势的推定的作业机械。
2.本技术基于2019年9月25日申请的日本特愿2019
‑
174615号来主张优先权,并在此援引其内容。
背景技术:
3.在建设施工现场,出于解决由少子化带来的人才不足问题、提高生产效率等目的,利用了信息通信技术的信息化施工正在普及。在信息化施工期间,有时通过管理施工现场的三维成品形状来管理施工的进展、品质等。为了管理三维成品形状,需要进行三维成品形状的测量,使用uav(unmanned aerial vehicle)、ts(total station)等的三维成品形状的测量技术也得以推进。而且,为了更频繁地测量施工现场中的三维形状,从作业机械测量周围的三维成品形状的技术也得以推进。
4.在专利文献1中记载了如下作业机械:在作业机械的回转体上安装立体相机,一边回转一边间歇地进行拍摄,根据拍摄到的图像来推定各拍摄中的回转体的回转角度,基于推定出的回转角度来合成周围的三维形状,由此测量作业机械的周围的三维形状。
5.现有技术文献
6.专利文献
7.专利文献1国际公开第2018/079789号
技术实现要素:
8.发明所要解决的课题
9.为了如上述那样管理三维成品形状,需要施工现场坐标系中的三维成品形状。因此,在专利文献1的作业机械中,使用基于gnss(global navigation satellite system:全球导航卫星系统)这样的卫星定位的gnss天线来测量施工现场坐标系中的作业机械的坐标值,将作业机械测量到的周围的三维形状变换为施工现场坐标系中的三维形状。
10.但是,在使用gnss天线的情况下,需要由纬度、经度、椭圆体高构成的地理坐标系坐标值和将地理坐标系坐标值变换为施工现场坐标系坐标值的坐标变换参数。为了求出坐标变换参数,需要对在施工现场设定的多个施工现场坐标系坐标值已知的已知点的地理坐标系坐标值进行测量的本地化(位置测定)这样的作业。因此,操作者需要前往施工现场,设置标记,使用ts、gnss来测量标记的地理坐标系坐标值,从而产生作业工时。
11.本发明鉴于上述课题,其目的在于提供一种作业机械,能够削减本地化所需的工时,测量施工现场坐标系中的作业机械的自身位置及姿势、周围的地形形状。
12.用于解决课题的手段
13.本发明的作业机械具备:行驶体,其能够行驶;回转体,其回转自如地安装于所述行驶体;作业前端部(front),其转动自如地安装于所述回转体;设计数据获取装置,其获取
具有施工完成后的地形数据的设计数据作为三维数据;地形测量装置,其测量周围的地形数据作为三维数据;以及控制装置,该控制装置具有:设计数据处理部,其处理由所述设计数据获取装置获取到的地形数据作为预先确定的第一坐标系的设计数据;当前地形数据生成部,其生成由所述地形测量装置测量到的地形数据作为基于所述地形测量装置的设置位置而确定的第二坐标系的当前地形数据;以及位置姿势推定部,其基于由所述当前地形数据生成部生成的所述当前地形数据来推定所述第二坐标系中的自身位置和姿势,所述作业机械的特征在于,所述控制装置从所述第一坐标系的设计数据中提取周边区域形状数据,将提取出的所述周边区域形状数据与所述当前地形数据之间的类似形状部分建立对应,以使对应后的所述类似形状部分的坐标值的差最小的方式运算进行从所述第二坐标系向所述第一坐标系的变换的坐标变换矩阵,使用运算出的所述坐标变换矩阵将所述作业机械的自身位置及姿势和所述当前地形数据从所述第二坐标系的坐标变换为所述第一坐标系的坐标。
14.发明效果
15.根据本发明,能够削减本地化所需的工时,测量施工现场坐标系中的作业机械的自身位置及姿势、周围的地形形状。
附图说明
16.图1是表示应用第一实施方式的作业机械的作业现场的概要图。
17.图2是表示第一实施方式的作业机械的结构的侧视图。
18.图3是表示作业机械的结构的液压回路图。
19.图4是表示作业机械的控制系统的结构的概要图。
20.图5是表示控制装置的处理的流程图。
21.图6是表示设计数据的形状的一例的概要图。
22.图7是表示动工测量的一例的概要图。
23.图8是表示设计数据的制作例的概要图。
24.图9是表示控制装置的处理的流程图。
25.图10是表示周边区域的提取例的概要图。
26.图11是表示控制装置的处理的流程图。
27.图12是表示控制装置的处理的流程图。
28.图13是表示控制装置的处理的流程图。
29.图14是表示关键点的提取例的侧视图。
30.图15是表示将类似形状部分建立对应的例子的概要图。
31.图16是表示控制装置的处理的流程图。
32.图17是说明求出坐标变换矩阵的例子的概要图。
33.图18是表示控制装置的处理的流程图。
34.图19是表示坐标变换的一例的概要图。
35.图20是表示第二实施方式的作业机械的控制系统的结构的概要图。
36.图21是表示控制装置的处理的流程图。
37.图22是表示控制装置的处理的流程图。
38.图23是表示施工完成后的施工区域的提取例的概要图。
39.图24是表示控制装置的处理的流程图。
40.图25是表示第三实施方式的作业机械的控制系统的结构的概要图。
41.图26是表示控制装置的处理的流程图。
具体实施方式
42.以下,参照附图对本发明的作业机械的实施方式进行说明。在以下的说明中,上下、左右、前后的方向及位置以作业机械的通常的使用状态、即作业机械的行驶体与地面接触的状态为基准。
43.[第一实施方式]
[0044]
首先,参照图1对应用第一实施方式的作业机械的作业现场进行说明。如图1所示,作业现场由对施工对象2进行信息化施工的作业机械1、和在施工对象2的上空飞行同时测量施工对象2的形状来进行动工测量的uav(unmanned aerial vehicle)6构成。
[0045]
在施工对象2设置有施工边界3。作业机械1以在由施工边界3包围的施工区域4中施工对象2成为预先确定的设计数据的形状的方式,对施工对象2进行挖掘作业、堆土作业、坡面整形作业等施工作业。另外,相对于施工区域4而存在周边区域5。周边区域5包括建筑物5a、5b、自然物5c、5d、5e、地形5f、5g等。由于作业机械1不对施工边界3的外侧的周边区域5进行施工,因此周边区域5的形状不会因作业机械1的施工作业而变化。
[0046]
信息化施工中,灵活运用如下功能:将具有施工完成后的施工对象2的形状数据的设计数据输入到作业机械1的控制装置21(后述),控制作业机械1的铲斗前端沿着根据设计数据设定的目标施工面移动的机器控制功能、使用安装于作业机械1的地形测量装置30(后述)来测量施工区域4的当前地形、管理施工区域4的成品形状的成品形状管理功能等。
[0047]
图2是表示第一实施方式的作业机械的结构的侧视图。本实施方式的作业机械1例如是液压挖掘机,具备能够行驶的行驶体10、相对于行驶体10沿左右方向回转自如地安装的回转体11、相对于回转体11沿上下方向转动自如地安装的作业前端部12。
[0048]
行驶体10配置于作业机械1的下部,例如构成为具有履带架42、前惰轮43、链轮44以及履带45。前空转轮43以及链轮44分别配置于履带架42,履带45配置为能够经由这些部件绕履带架42运转。
[0049]
回转体11配置在行驶体10的上方。该回转体11具备:回转马达19,其用于回转;操作室20,其供操作人员乘坐而操作作业机械1;控制装置21,其控制作业机械1的动作;操作杆22a、22b,其设置于操作室20内;显示装置26,其设置于操作室20的内部,且显示作业机械1的车体信息等;以及设计数据获取装置29,其设置于操作室20内,且获取设计数据作为三维数据。
[0050]
另外,在回转体11上分别安装有获取绕回转体11的角速度的回转陀螺仪27和获取回转体11的前后左右方向的倾斜角度的倾斜传感器28。而且,在回转体11上安装有在回转体11回转的同时测量作业机械1的周围的地形形状作为三维地形数据的地形测量装置30。
[0051]
地形测量装置30例如是由左右一对相机(相机30a、30b)构成的立体相机,安装在作业机械1的后方。该地形测量装置30与立体相机控制装置31电连接,并将拍摄到的立体图像发送到立体相机控制装置31。另外,地形测量装置30的设置方向不限于后方。另外,地形
测量装置30的台数可以是1台,也可以是多台。此外,作为地形测量装置30,除了立体相机以外,也可以使用三维距离测定传感器等。
[0052]
立体相机控制装置31向相机30a和相机30b发送用于同步相机30a和相机30b的拍摄的同步信号,进行从来自相机30a和相机30b的2张图像变换为距离信息的运算,并将运算出的距离信息发送到控制装置21。
[0053]
作业前端部12具备转动自如地设置在回转体11上的动臂13、转动自如地设置在动臂13的前端的斗杆14、转动自如地设置在斗杆14的前端的铲斗15、驱动动臂13的动臂缸16、驱动斗杆14的斗杆缸17、驱动铲斗15的铲斗缸18。在动臂13、斗杆14、铲斗15的转动轴分别安装有动臂角度传感器23、斗杆角度传感器24、铲斗角度传感器25。这些角度传感器分别获取动臂13、斗杆14、铲斗15的转动角度,并将获取的结果输出到控制装置21。
[0054]
图3是表示作业机械的结构的液压回路图。如图3所示,工作油箱41内的压油被主泵39排出,进而通过控制阀35~38分别向动臂缸16、斗杆缸17、铲斗缸18、回转马达19供给。由此,动臂缸16、斗杆缸17、铲斗缸18、回转马达19分别被驱动。控制阀35~38例如由电磁阀构成,由控制装置21分别控制。
[0055]
另外,通过溢流阀40调整通过主泵39排出的压油,以避免压力变得过大。另外,经由各缸、回转马达以及溢流阀40的压油再次返回至工作油箱41。
[0056]
从操作杆22a、22b输出的电信号在由控制装置21接收后,转换为适当的电信号而驱动控制阀35~38。另外,控制阀35~38的开闭量构成为根据操作杆22a、22b的操作量而变化。由此,分别调整压油向动臂缸16、斗杆缸17、铲斗缸18、回转马达19的供给量。
[0057]
控制装置21例如接收来自动臂角度传感器23、斗杆角度传感器24、铲斗角度传感器25、回转陀螺仪27、倾斜传感器28、设计数据获取装置29、立体相机控制装置31的信号,基于接收到的信号来运算作业机械1的位置坐标、作业机械1的姿势及作业机械1的周围地形,并将运算出的结果显示于显示装置26。
[0058]
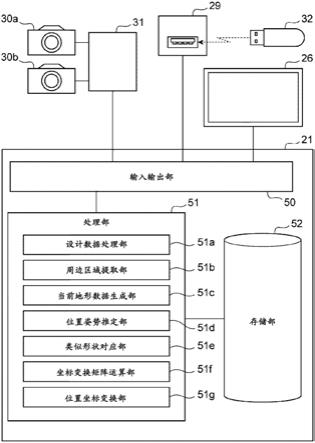
图4是表示作业机械的控制系统的结构的概要图。如图4所示,作业机械1的控制系统由控制装置21、与控制装置21电连接的立体相机控制装置31、设计数据获取装置29以及显示装置26等构成。设计数据获取装置29例如是能够与外部存储介质32连接的usb(universal serial bus:通用串行总线)端口。
[0059]
控制装置21具有输入输出部50、处理部51以及存储部52。输入输出部50是用于将控制装置21与立体相机控制装置31、设计数据获取装置29、显示装置26等装置连接的接口。处理部51由将cpu(central processing unit:中央处理单元)和gpu(graphics processing unit:图形处理单元)组合而成的微型计算机构成。该处理部51还具有设计数据处理部51a、周边区域提取部51b、当前地形数据生成部51c、位置姿势推定部51d、类似形状对应部51e、坐标变换矩阵运算部51f以及位置坐标变换部51g。
[0060]
设计数据处理部51a构成为,经由输入输出部50将来自与设计数据获取装置29连接的外部存储介质32的设计数据作为设计数据坐标系(第一坐标系)的数据读出,将读出的设计数据写入存储部52。周边区域提取部51b读出存储于存储部52的设计数据,提取读出的设计数据中不进行施工的周边区域的形状数据即周边区域形状数据,并将提取出的周边区域形状数据写入存储部52。
[0061]
当前地形数据生成部51c构成为,基于由地形测量装置30测量并从立体相机控制
装置31输入的地形数据,生成基于该地形测量装置30的设置位置(即,作业机械1的设置位置)而确定的当前地形坐标系(第二坐标系)的当前地形数据,并将生成的当前地形数据写入存储部52。另外,这里的当前地形数据涉及作业机械1的周围的地形形状。
[0062]
位置姿势推定部51d构成为,基于当前地形数据生成部51c生成的当前地形数据,推定当前地形坐标系中的作业机械1的自身位置及姿势(以下,有时将“作业机械的自身位置及姿势”简称为“自身位置及姿势”),并将推定出的作业机械1的自身位置及姿势的坐标写入存储部52。
[0063]
类似形状对应部51e搜索由周边区域提取部51b提取出的周边区域形状数据与由当前地形数据生成部51c生成的当前地形数据之间的类似形状部分,并将搜索到的类似形状部分建立对应。坐标变换矩阵运算部51f构成为,使用由类似形状对应部51e建立对应的周边区域形状数据和当前地形数据的类似形状部分,以使对应后的类似形状部分的坐标值之差成为最小的方式运算进行从当前地形坐标系向设计数据坐标系的变换的坐标变换矩阵,并将运算出的坐标变换矩阵写入存储部52。
[0064]
位置坐标变换部51g被构成为,使用由坐标变换矩阵运算部51f运算出的坐标变换矩阵,将由位置姿势推定部51d推定出的自身位置及姿势和当前地形数据从当前地形坐标系的坐标变换为设计数据坐标系的坐标。
[0065]
另一方面,存储部52由ram(random access memory:随机存取存储器)等存储器、硬盘驱动器、固态驱动器等存储器构成。该存储部52与处理部51电连接,构成为能够应对处理部51的各写入作业以及读出作业。例如,存储部52存储有用于进行处理部51的各处理的软件的源代码。
[0066]
接着,参照图5至图22对控制装置21的控制处理进行说明。控制装置21的控制处理例如每隔一定的周期执行。
[0067]
图5是表示处理部51的设计数据处理部51a的处理的流程图。如图5所示,在步骤s100中,设计数据处理部51a经由输入输出部50从与设计数据获取装置29连接的外部存储介质32读出设计数据。
[0068]
在此,使用图6~图8对设计数据的一例进行说明。设计数据是施工完成后的施工对象2的数据。设计数据中包含地形数据、施工现场坐标系的基准点60以及施工边界3的信息,还包含设计数据的形状符合施工区域4和周边区域5中的哪一个的信息。在此,由于使用设计数据坐标系进行施工,因此施工现场坐标系与设计数据坐标系相同,因此,设计数据成为施工现场坐标系的设计数据。另外,在以下的说明中,有时将设计数据坐标系称为施工现场坐标系。
[0069]
设计数据是使用通过动工测量测量出的施工前的地形数据和施工的图纸数据而生成的。图7是表示动工测量的一例的概要图。在动工测量中,使用uav6测量施工前的施工对象2的地形形状。为了能够从uav6俯视观察来测量施工对象2的地形形状,在uav6上向下安装有激光扫描仪、相机等测量装置。
[0070]
图8是表示设计数据的制作例的概要图,图8的上段表示施工对象2的施工前的地形数据。在施工前的地形数据中包含施工前的地形数据的坐标系的基准点62。图8的中段表示由cad等制作的施工图纸的数据。在施工附图中,包含基准点61和施工边界3的信息。图8的下段表示设计数据。设计数据是与施工完成后的施工对象2的形状相关的数据,通过在施
工前的地形数据上重叠图纸数据来制作。所制作的设计数据坐标系的基准点60使用施工图纸的坐标系的基准点61。并且,由设计者、施工管理者等制作的设计数据被保存在外部存储介质32中,经由设计数据获取装置29取入控制装置21。
[0071]
在接着步骤s100的步骤s101中,设计数据处理部51a将读出的设计数据写入存储部52。
[0072]
图9是表示周边区域提取部51b的处理的流程图。如图9所示,在步骤s200中,周边区域提取部51b从存储部52读出设计数据。在接着步骤s200的步骤s201中,周边区域提取部51b从读出的设计数据中提取周边区域形状数据。周边区域形状数据是将施工区域4除外的周边区域5的形状数据,能够使用设计数据所包含的与施工边界3、施工区域4及周边区域5相关的信息容易地提取。在图10中示出从设计数据中提取出的周边区域形状数据的例子。周边区域形状数据的坐标系的基准点63与设计数据坐标系的基准点60(参照图6)相同。
[0073]
在接着步骤s201的步骤s202中,周边区域提取部51b将提取出的周边区域形状数据写入存储部52。
[0074]
接着,参照图11~图13对利用在移动机器人领域等中经常使用的slam(simultaneous localization and mapping:同时定位与建图)技术,由当前地形数据生成部51c进行的当前地形数据的生成、由位置姿势推定部51d进行的作业机械1的自身位置及姿势的推定进行说明。另外,由位置姿势推定部51d进行的作业机械1的自身位置及姿势的推定使用与当前地形数据生成部51c生成的当前地形数据相同的坐标系(即,当前地形坐标系)。
[0075]
图11是位置姿势推定单元51d推定自身位置和姿势的流程图。如图11所示,在步骤s300中,位置姿势推定部51d判定由当前地形数据生成部51c写入的当前地形数据是否存在于存储部52。在判定为在存储部52中存在当前地形数据的情况下,控制处理进入步骤s301。另一方面,在判定为不存在当前地形数据的情况下,控制处理进入步骤s305。
[0076]
在步骤s301中,位置姿势推定部51d从存储部52读出当前地形数据。在接着步骤s301的步骤s302中,位置姿势推定部51d从存储部52读出该位置姿势推定部51d的处理的1个周期前的自身位置及姿势的数据。
[0077]
在接着步骤s302的步骤s303中,位置姿势推定部51d从立体相机控制装置31获取地形信息。例如,位置姿势推定部51d从立体相机控制装置31获取地形测量装置30的测量范围内的地形信息(即地形数据)。
[0078]
在接着步骤s303的步骤s304中,位置姿势推定部51d基于在步骤s301中读出的当前地形数据,推定该当前地形数据坐标系中的作业机械1的自身位置及姿势。例如,位置姿势推定部51d使用在步骤s301中读出的当前地形数据和在步骤s302中读出的1个周期前的自身位置及姿势的数据,根据在步骤s303中获取的地形信息,在前周期的位置的附近使用形状匹配方法,以得到在步骤s303中获取的地形信息的方式推定自身位置及姿势。另外,位置姿势推定部51d也可以通过使用从地形测量装置30获取的影像来运算光流(optical flow),来推定自身位置及姿势。
[0079]
在接着步骤s304的步骤s306中,位置姿势推定部51d将在步骤s304中推定出的当前地形坐标系中的自身位置及姿势写入存储部52。
[0080]
另一方面,在步骤s305中,位置姿势推定部51d将正在进行控制处理的当前时刻的
自身位置及姿势(即,当前自身位置及姿势)设定为当前地形坐标系的基准点。而且,设定的基准点成为当前地形数据生成部51c生成的当前地形数据的基准点。在接着步骤s305的步骤s306中,位置姿势推定部51d将在步骤s305中设定的当前地形坐标系中的自身位置及姿势写入存储部52。
[0081]
图12是当前地形数据生成部51c生成当前地形数据的流程图。如图12所示,在步骤s400中,当前地形数据生成部51c判定在存储部52中是否存在自身位置及姿势的数据。在判定为在存储部52中存在自身位置及姿势的数据的情况下,控制处理进入步骤s401。另一方面,在判定为不存在的情况下,重复进行步骤s400。
[0082]
在接着步骤s400的步骤s401中,当前地形数据生成部51c从存储部52读出自身位置和姿势的数据。在接着步骤s401的步骤s402中,当前地形数据生成部51c判定在存储部52中是否存在当前地形数据。在判定为在存储部52中存在当前地形数据的情况下,控制处理进入步骤s403。另一方面,在判定为不存在当前地形数据的情况下,控制处理进入步骤s404。
[0083]
在接着步骤s402的步骤s403中,当前地形数据生成部51c从存储部52读出当前地形数据。在接着步骤s403的步骤s404中,当前地形数据生成部51c从立体相机控制装置31获取地形测量装置30的测量范围内的地形信息(即地形数据)。
[0084]
在接着步骤s404的步骤s405中,当前地形数据生成部51c生成作业机械1的周围的当前地形数据。具体而言,当前地形数据生成部51c使用在步骤s403中读出的当前地形数据、在步骤s401中读出的自身位置及姿势的数据、自身位置及姿势与地形测量装置30的位置关系,运算当前地形坐标系中的作业机械1的地形测量装置30的位置以及姿势,进而将在步骤s404中获取的地形数据变换为当前地形坐标系中的地形数据,进行当前地形数据的生成以及更新。另外,当前地形数据的更新在由地形测量装置30测量的地形数据与以前的当前地形数据重复的情况下进行。
[0085]
在接着步骤s405的步骤s406中,当前地形数据生成部51c将在步骤s405中生成的当前地形数据写入存储部52。
[0086]
图11所示的位置姿势推定部的处理和图12所示的当前地形数据生成部的处理具有并列关系。即,在位置姿势推定部51d的处理中,使用当前地形数据生成部51c的生成结果,在当前地形数据生成部51c的处理中,也使用位置姿势推定部51d的推定结果。
[0087]
以下,参照图13~图15对类似形状对应部51e搜索由周边区域提取部51b提取出的周边区域形状数据与由当前地形数据生成部51c生成的当前地形数据之间的类似形状部分并将类似形状部分建立对应的情况进行说明。
[0088]
图13是示出类似形状对应部51e的处理的流程图。如图13所示,在步骤s500中,类似形状对应部51e从存储部52读出当前地形数据生成部51c生成的当前地形数据。在接着步骤s500的步骤s501中,类似形状对应部51e从在步骤s500中读出的当前地形数据中提取当前地形数据的关键点。关键点是例如在地形中斜率急剧变化的点、顶点等具有特征的点。例如,如图14所示,在由安装于回转体11的地形测量装置30测量到的地形数据65中,地形的斜率变更的点65a和点65b成为关键点。如果地形是点群信息,则关键点也能够通过使用均匀采样(uniform sampling)等算法来提取。
[0089]
在接着步骤s501的步骤s502中,类似形状对应部51e从存储部52读出由周边区域
提取部51b提取出的周边区域形状数据。在接着步骤s502的步骤s503中,类似形状对应部51e提取在步骤s502中读出的周边区域形状数据的关键点。
[0090]
在接着步骤s503的步骤s504中,类似形状对应部51e将周边区域形状数据与当前地形数据之间的类似形状部分建立对应。更具体而言,类似形状对应部51e比较在步骤s501中提取出的当前地形数据的关键点和在步骤s503中提取出的周边区域形状数据的关键点,通过匹配依次搜索形状类似的部分(即,类似形状部分),将类似形状部分建立对应。
[0091]
图15表示将类似形状部分建立对应的处理的一例。图15的上段是周围地形的形状数据及其关键点,图15的下段是当前地形数据及其关键点。通过使用图15的上段和下段各自的关键点彼此的位置关系,能够将类似形状部分对应起来。例如,图15的上段的关键点66与图15的下段的关键点68具有对应关系,图15的上段的关键点67与图15的下段的关键点69具有对应关系。另外,图15中的70、71是坐标系的基准点。
[0092]
在接着步骤s504的步骤s505中,类似形状对应部51e将在步骤s504中进行的周边区域形状数据与当前地形数据的对应关系(换言之,建立了对应的类似形状部分)写入存储部52。
[0093]
接着,参照图16以及图17说明使用上述的周边区域形状数据与当前地形数据的对应关系,运算从当前地形坐标系向周边区域形状数据的坐标系即施工现场坐标系的坐标变换矩阵。
[0094]
图16是表示坐标变换矩阵运算部51f的处理的流程图。如图16所示,在步骤s600中,坐标变换矩阵运算部51f从存储部52读出周边区域形状数据与当前地形数据的对应关系。在接着步骤s600的步骤s601中,坐标变换矩阵运算部51f将对应的关键点的数量(nkeypoint)与预定的阈值(nthreshold)进行比较。
[0095]
阈值(nthreshold)是在生成的当前地形数据与周边区域形状数据之间没有对应的关键点的情况下,或者在对应的关键点的数量少而无法唯一地确定周边区域形状数据与所生成的当前地形数据的对位的情况下,为了防止无法进行周边区域形状数据与当前地形的关键点的对位而设定的。例如,如果是二维的形状,则需要对为了对位而对应的3个关键点的对,因此nthreshold=3,如果是三维,则需要4个关键点的对,因此nthreshold=4。另外,阈值(nthreshold)也可以大于3、4。
[0096]
在对应的关键点的数量(nkeypoint)为阈值(nthreshold)以上的情况下,控制处理进入步骤s602。另一方面,在对应的关键点(nkeypoint)小于阈值(nthreshold)的情况下,控制处理进入步骤s604。
[0097]
在步骤s602中,坐标变换矩阵运算部51f进行周边区域形状数据与当前地形数据生成部51c生成的当前地形数据的对位,运算坐标变换矩阵。例如,如果是二维形状数据,则坐标变换矩阵运算部51f求出表示周边区域形状数据的基准点与当前地形数据的基准点的位置关系的坐标变换矩阵h。坐标变换矩阵h使用平行移动矩阵t、旋转矩阵r以及放大缩小矩阵s由以下的式(1)求出。
[0098]
h=t
×
r
×
s
ꢀꢀ
式(1)
[0099]
若对式(1)的平行移动矩阵t、旋转矩阵r、放大缩小矩阵s使用x方向的平行移动x、y方向的平行移动y、旋转角θ、放大缩小率s的值,则成为以下的式(2)~式(4)。
[0100]
t=(1 0 x;0 1 y;0 0 1)
ꢀꢀꢀ
式(2)
[0101]
r=(cos(θ)
ꢀ‑
sin(θ) 0;sin(θ) cos(θ) 0;0 0 1)
ꢀꢀꢀ
式(3)
[0102]
s=(s 0 0;0 s 0;0 0 1)
ꢀꢀꢀ
式(4)
[0103]
平行移动矩阵t的x、y、旋转矩阵r的θ、放大缩小矩阵s的s可以通过使用icp(iterative closest point:迭代最近点)、softassign、em
‑
icp等算法来运算。例如,使用对应的关键点,将当前地形数据的关键点变换为施工现场坐标系中的坐标值,通过反复运算使施工现场坐标系中的当前地形数据的关键点与对应的周边区域形状数据的关键点之间的距离最小的x、y、θ、s,根据平行移动矩阵t、旋转矩阵r、放大缩小矩阵s求出坐标变换矩阵h。
[0104]
然后,在将当前地形坐标系中的坐标值(x1,y1)变换为施工现场坐标系中的坐标值(x2,y2)的情况下,能够通过使用以下的式(5)来运算。
[0105]
tr(x2 y2 1)=h
×
tr(x1 y1 a)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式(5)
[0106]
图17表示进行了对位的周边区域形状数据和当前地形数据的一例。求出x方向的平行移动的72a、72b、y方向的平行移动73a、73b、旋转角74a、74b、放大缩小率s,使得坐标变换后的对应的关键点之间的距离成为最小,换言之,使对应的类似形状部分的坐标值之差成为最小。放大缩小率s是放大的倍率的倒数,例如在将当前地形坐标系放大为2倍的情况下,s为0.5。在作为放大缩小率s=1的例子的图17的例子中,与图17的上段相比,下段的对应的关键点之间的距离小,作为用于求出坐标变换矩阵h的x、y、θ、s,图17的下段的72b、73b、74b是适当的。另外,图17中的70a、70b、71a、71b是坐标系的基准点。
[0107]
在接着步骤s602的步骤s603中,坐标变换矩阵运算部51f将在步骤s602中运算出的坐标变换矩阵h写入存储部52。另一方面,在步骤s604中,坐标变换矩阵运算部51f进行错误处理。例如,坐标变换矩阵运算部51f经由输入输出部50使显示装置26显示“测量点不足,请使作业机械行驶或者回转”这样的消息。
[0108]
接着,参照图18以及图19对位置坐标变换部51g使用坐标变换矩阵h求出施工现场坐标系中的作业机械位置的坐标值的运算进行说明。
[0109]
图18是表示位置坐标变换部51g的处理的流程图。如图18所示,在步骤s700中,位置坐标变换部51g从存储部52读出坐标变换矩阵h。在接着步骤s700的步骤s701中,位置坐标变换部51g从存储部52读出位置姿势推定部51d推定出的当前地形坐标系中的自身位置及姿势。在接着步骤s701的步骤s702中,位置坐标变换部51g从存储部52读出当前地形数据生成部51c生成的当前地形数据。
[0110]
在接着步骤s702的步骤s703中,位置坐标变换部51g基于在步骤s700中读出的坐标变换矩阵h和在步骤s701中读出的当前地形坐标系中的自身位置及姿势的坐标p1,使用以下的式(6)来运算施工现场坐标系中的自身位置及姿势的坐标p2。
[0111]
p2=h
×
p1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式(6)
[0112]
另外,若将当前地形坐标系中的作业机械1的方位角设为θ1,将施工现场坐标系中的作业机械1的方位角设为θ2,则能够使用坐标变换矩阵h的θ根据式(7)求出作业机械1的方位角θ2。
[0113]
θ2=θ1 θ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式(7)
[0114]
在接着步骤s703的步骤s704中,位置坐标变换部51g使用在步骤s700中读出的坐标变换矩阵h和在步骤s702中读出的当前地形数据,运算施工现场坐标系中的当前地形数
据。例如,在用点群表示当前地形数据的情况下,通过利用坐标变换矩阵h对当前地形坐标系中的点群的坐标值进行坐标变换,能够运算施工现场坐标系中的当前地形数据。
[0115]
图19是表示位置坐标变换部51g运算出的现场坐标系中的当前地形数据和自身位置及姿势的一例。图19的上段表示当前地形数据生成部51c生成的当前地形数据和位置姿势推定部51d推定出的自身位置及姿势。并且,通过在步骤s703和步骤s704中使用坐标变换矩阵h进行坐标变换,能够如图19的下段那样求出施工现场坐标系中的当前地形数据和施工现场坐标系中的自身位置及姿势。
[0116]
在接着步骤s704的步骤s705中,位置坐标变换部51g将在步骤s703中运算出的施工现场坐标系中的自身位置及姿势的坐标和在步骤s704中运算出的施工现场坐标系中的当前地形数据写入存储部52。
[0117]
在本实施方式的作业机械1中,控制装置21的处理部51具有:周边区域提取部51b,其从施工现场坐标系的设计数据中提取周边区域形状数据;类似形状对应部51e,其搜索提取出的周边区域形状数据与当前地形坐标系的当前地形数据之间的类似形状部分并建立对应;坐标变换矩阵运算部51f,其以使对应的类似形状部分的坐标值之差为最小的方式运算进行从当前地形坐标系向施工现场坐标系的变换的坐标变换矩阵;以及位置坐标变换部51g,其使用运算出的坐标变换矩阵将作业机械1的自身位置及姿势和当前地形数据从当前地形坐标系的坐标变换为施工现场坐标系的坐标。因此,使用通过施工而形状不变的周边区域,由此能够削减本地化所需的工时,测量施工现场坐标系中的作业机械1的自身位置及姿势、周围的地形形状。
[0118]
[第二实施方式]
[0119]
以下,参照图20至图24对作业机械的第二实施方式进行说明。本实施方式的作业机械1a在处理部51a还具有施工区域成品形状提取部51h以及施工完成区域提取部51i这一点上与上述的第一实施方式不同。其他结构与第一实施方式相同,因此省略重复说明。
[0120]
图20是表示第二实施方式的作业机械的控制系统的结构的概要图。如图20所示,作业机械1a的处理部51a还具有施工区域成品形状提取部51h和施工完成区域提取部51i。
[0121]
首先,参照图21,说明施工区域成品形状提取部51h从设计数据中提取施工区域中的施工完成后的形状数据的情况。
[0122]
图21是表示施工区域成品形状提取部51h的处理的流程图。如图21所示,在步骤s800中,施工区域成品形状提取部51h从存储部52读出由设计数据处理部51a写入的设计数据。在接着步骤s800的步骤s801中,施工区域成品形状提取部51h从图6所示的设计数据中提取施工区域4中的施工完成后的形状数据(即,施工区域成品形状数据)。施工区域成品形状数据能够通过使用设计数据所包含的与施工边界3、施工区域4、周边区域5相关的信息而容易地提取。施工区域成品形状数据的坐标系的基准点与设计数据坐标系的基准点60相同。另外,在施工区域成品形状数据中还包含施工边界3的信息。
[0123]
在接着步骤s801的步骤s802中,施工区域成品形状提取部51h将提取出的施工区域成品形状数据写入存储部52。
[0124]
接着,参照图22和图23,说明施工完成区域提取部51i判定施工区域4内的施工对象的一部分是否成为施工完成,并提取判定为施工完成的区域的情况。
[0125]
图22是表示施工完成区域提取部51i的处理的流程图。如图22所示,在步骤s900
中,施工完成区域提取部51i从存储部52读出由施工区域成品形状提取部51h写入的施工区域成品形状数据。在接着步骤s900的步骤s901中,施工完成区域提取部51i从存储部52读出由位置坐标转换部51g写入的施工现场坐标系中的当前地形数据。
[0126]
在接着步骤s901的步骤s902中,施工完成区域提取部51i使用在步骤s900中读出的施工区域成品形状数据的施工边界3的数据和在步骤s901中读出的当前地形数据,提取施工区域中的当前地形数据。在此,施工边界3的数据的坐标系与当前地形数据的坐标系相同,因此能够容易地求出施工区域中的当前地形数据。
[0127]
在接着步骤s902的步骤s903中,施工完成区域提取部51i进一步提取在步骤s900中读出的施工区域成品形状数据和在步骤s902中提取出的施工区域中的当前地形数据的关键表面。关键表面是指例如通过形状数据判定为被关键点包围的平面的面。在使用ransac(random sample consensus)算法等从形状数据中提取出的平面被关键点包围的情况下,能够将该平面作为关键表面来求出。
[0128]
在接着步骤s903的步骤s904中,施工完成区域提取部51i通过对在步骤s903中提取出的施工区域成品形状数据的关键表面与施工区域中的当前地形数据的关键表面的坐标值进行比较,提取施工完成区域。例如,如图23所示,在存在在施工区域4中完成的坡面75的施工现场,作为当前地形数据,地形测量装置30测量了坡面75的情况下,完成的坡面75作为施工区域中的当前地形数据的关键表面而在步骤s903中求出。
[0129]
另外,由于施工区域成品形状数据是施工完成后的形状,因此在施工区域成品形状数据的关键表面必定包括坡面75。而且,施工区域成品形状数据和施工区域中的当前地形数据的共用关键表面能够视为当前地形成为施工完成后的形状,因此能够将共用关键表面判定为施工完成区域。因此,施工完成区域提取部51i提取共用关键表面作为施工完成区域。
[0130]
在接着步骤s904的步骤s905中,施工完成区域提取部51i进一步提取在步骤s904中提取出的施工完成区域的形状数据。例如,施工完成区域提取部51i从在步骤s900中读出的施工区域成品形状数据中提取与施工完成区域相应的形状数据。施工完成区域的形状数据的坐标系的基准点与设计数据坐标系的基准点60相同。在接着步骤s905的步骤s906中,施工完成区域提取部51i将在步骤s905中提取出的施工完成区域的形状数据写入存储部52。
[0131]
在本实施方式中,作业机械1a的处理部51a还具有施工区域成品形状提取部51h和施工完成区域提取部51i,因此类似形状对应部51e的处理与在第一实施方式中叙述的类似形状对应部51e的处理不同。更具体而言,如图24所示,本实施方式的类似形状对应部51e的处理与在第一实施方式中叙述的图13的流程图相比,在步骤s502与步骤s503之间追加步骤s506以及步骤s507,并且图13所示的步骤s503变更为步骤s508。以下,仅对该追加的内容以及变更后的内容进行说明。
[0132]
即,在步骤s506中,类似形状对应部51e从存储部52读出施工完成区域提取部51i提取出的施工完成区域的形状数据。在接着步骤s506的步骤s507中,类似形状对应部51e制作将在步骤s502中读出的周边区域形状数据中合成在步骤s506中读出的施工完成区域的形状数据而得到的形状数据作为不变区域的形状数据。周边区域形状数据以及施工完成区域的形状数据的坐标系的基准点分别在施工现场坐标系的基准点处相同,因此例如能够容
易地求出点群数据的和集合。
[0133]
在接着步骤s507的步骤s508中,类似形状对应部51e从在步骤s507中生成的不变区域的形状数据中提取不变区域的形状数据的关键点。在接着步骤s508的步骤s504中,类似形状对应部51e比较在步骤s501中提取出的当前地形数据的关键点和在步骤s508中提取出的不变区域的形状数据的关键点,依次搜索类似形状部分,并将类似形状部分建立对应,由此求出不变区域的形状数据与当前地形数据的对应关系。
[0134]
然后,在接着步骤s504的步骤s505中,类似形状对应部51e将在步骤s504中求出的对应关系写入存储部52。
[0135]
根据本实施方式的作业机械1a,通过判定施工完成的区域,并将施工完成区域与周边区域一起设为不变区域,能够削减本地化的工时,测量施工现场坐标系中的作业机械的自身位置及姿势、周围的地形形状。
[0136]
[第三实施方式]
[0137]
以下,参照图25以及图26对作业机械的第三实施方式进行说明。本实施方式的作业机械与上述的第一实施方式的不同点在于,接收来自定位卫星的信号,将地球上的作业机械1的纬度、经度、椭圆体高的地理坐标和施工现场坐标系中的作业机械1的位置坐标整合,将整合后的位置坐标发送到外部服务器。其他结构与第一实施方式相同,因此省略重复说明。
[0138]
图25是表示第三实施方式的作业机械的控制系统的结构的概要图。如图25所示,本实施方式的作业机械的控制系统与第一实施方式所述的控制系统相比,还具备gnss(globalnavigationsatellitesystem:全球导航卫星系统)天线(位置获取装置)33和无线通信天线(通信装置)34,且处理部51b还具有位置信息发送部51j。
[0139]
图26是表示位置信息发送部51j的处理的流程图。如图26所示,在步骤s1000中,位置信息发送部51j使用gnss天线33从定位卫星获取地球上的作业机械1的纬度、经度、椭圆体高的信息。在接着步骤s1000的步骤s1001中,位置信息发送部51j从存储部52读出由位置坐标变换部51g求出的施工现场坐标系中的作业机械1的位置信息(即,作业机械1的自身位置的坐标)。
[0140]
在接着步骤s1001的步骤s1002中,将在步骤s1000和步骤s1001中获取的位置信息整合,将纬度、经度、椭圆体高和施工现场坐标系中的作业机械1的位置信息成对地经由无线通信天线34发送到例如设置于施工现场的事务室的外部服务器。另外,外部服务器的设置场所不限于施工现场,也可以是云服务器。
[0141]
根据本实施方式,与第一实施方式同样地能够削减本地化的工时,除了能够测量施工现场坐标系中的作业机械1的位置姿势和周围的地形形状之外,还将多个纬度、经度、椭圆体高和施工现场坐标系中的作业机械1的位置信息的对发送到外部服务器,因此能够导出纬度、经度、椭圆体高与施工现场坐标系中的自身位置的坐标的对应关系。
[0142]
以上,对本发明的实施方式进行了详述,但本发明并不限定于上述的实施方式,在不脱离技术方案所记载的本发明的精神的范围内,能够进行各种设计变更。
[0143]
附图标记说明
[0144]
11a作业机械
[0145]
10行驶体
[0146]
11回转体
[0147]
12作业前端部
[0148]
21控制装置
[0149]
26显示装置
[0150]
29设计数据获取装置
[0151]
30地形测量装置
[0152]
30a、30b相机
[0153]
31立体相机控制装置
[0154]
32外部存储介质
[0155]
33gnss天线(位置获取装置)
[0156]
34无线通信天线(通信装置)
[0157]
50输入输出部
[0158]
51、51a、51b处理部
[0159]
51a设计数据处理部
[0160]
51b周边区域提取部
[0161]
51c当前地形数据生成部
[0162]
51d位置姿势推定部
[0163]
51e类似形状对应部
[0164]
51f坐标变换矩阵运算部
[0165]
51g位置坐标变换部
[0166]
51h施工区域成品形状提取部
[0167]
51i施工完成区域提取部
[0168]
51j位置信息发送部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。