1.本技术主张基于2020年3月25日申请的日本专利申请第2020
‑
054706号的优先权。该日本技术的全部内容通过参考援用于本说明书中。
2.本发明涉及一种挖土机的管理系统。
背景技术:
3.以往,已知一种通过利用多个传感器检测挖土机的工作状态,使用分析模型进行分析,从而计算施加于挖土机的组件的应力的技术(例如,参考专利文献1)。
4.专利文献1:日本特开2014
‑
85293号公报
5.但是,以往的挖土机的保证期间由预先设定的期间唯一地决定。然而,在如上所述的挖土机中,存在如破碎器作业那样对结构部件负荷大的作业、或如修整作业、装载作业、平整作业那样对结构部件负荷小的作业等各种作业。
技术实现要素:
6.因此,鉴于上述情况,本发明的目的在于提供一种能够设定与使用状况对应的保证内容的挖土机的管理系统。
7.本发明的实施方式所涉及的挖土机的管理系统具备:状态检测装置,检测评价对象的挖土机的工作状态;控制装置,根据所述检测到的所述工作状态计算所述挖土机的疲劳度,并计算与所述计算出的所述疲劳度建立关联的保证内容信息;及显示装置,显示所述计算出的所述保证内容信息。
8.发明效果
9.根据上述挖土机的管理系统,能够设定与使用状况对应的保证内容。
附图说明
10.图1是表示一实施方式的挖土机的管理系统的图。
11.图2是一实施方式的挖土机的管理系统的框图。
12.图3是表示疲劳度计算处理的一例的流程图。
13.图4是表示一实施方式的显示画面的一例的图。
14.图5是表示一实施方式的显示画面的另一例的图。
15.图6是表示一实施方式的显示画面的又一例的图。
16.图中:100
‑
挖土机,200
‑
管理装置,210
‑
控制装置,211
‑
挖土机信息管理部,212
‑
疲劳度计算部,213
‑
繁忙期信息管理部,214
‑
保证内容決定部,230
‑
显示装置,300
‑
管理系统,400、500、600
‑
显示画面。
具体实施方式
17.以下,参考附图,对用于实施发明的方式进行说明。在各附图中,有时对相同的结
构部分标注相同的符号并省略重复的说明。
18.参考图1,对一实施方式的挖土机的管理系统(以下,还简称为“管理系统”。)进行说明。图1是表示一实施方式的挖土机的管理系统的图。
19.管理系统300包括管理对象的挖土机100及管理装置200。挖土机100及管理装置200经由通信网络nw而进行相互通信。
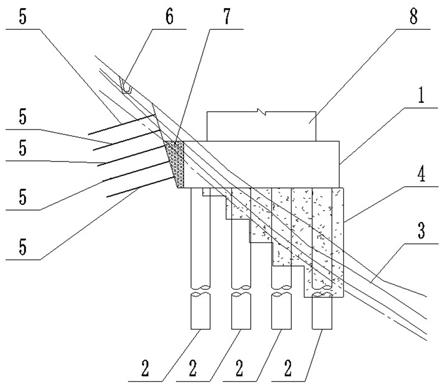
20.在挖土机100的下部行走体1上,经由回转机构2,可回转地搭载有上部回转体3。在上部回转体3上,安装有动臂4。在动臂4的前端安装有斗杆5,在斗杆5的前端安装有作为端接附属装置的铲斗6。
21.动臂4、斗杆5及铲斗6构成作为附属装置的一例的挖掘附属装置。动臂4由动臂缸7驱动,斗杆5由斗杆缸8驱动,铲斗6由铲斗缸9驱动。在动臂4安装有动臂角度传感器s1,在斗杆5安装有斗杆角度传感器s2,在铲斗6安装有铲斗角度传感器s3。将动臂角度传感器s1、斗杆角度传感器s2及铲斗角度传感器s3统称为“姿势传感器”。这是因为在确定附属装置的姿势时使用。
22.动臂角度传感器s1检测动臂4的转动角度。在本实施方式中,动臂角度传感器s1为加速度传感器,检测动臂4相对于上部回转体3的转动角度(以下,称为“动臂角度”。)。关于动臂角度,例如,在使动臂4下降到最低时成为最小角度,随着使动臂4上升而变大。
23.斗杆角度传感器s2检测斗杆5的转动角度。在本实施方式中,斗杆角度传感器s2为加速度传感器,检测斗杆5相对于动臂4的转动角度(以下,称为“斗杆角度”。)。关于斗杆角度,例如,在使斗杆5最闭合时成为最小角度,随着使斗杆5打开而变大。
24.铲斗角度传感器s3检测铲斗6的转动角度。在本实施方式中,铲斗角度传感器s3为加速度传感器,检测铲斗6相对于斗杆5的转动角度(以下,称为“铲斗角度”。)。关于铲斗角度,例如,在使铲斗6最闭合时成为最小角度,随着使铲斗6打开而变大。
25.动臂角度传感器s1、斗杆角度传感器s2及铲斗角度传感器s3也可以分别是利用了可变电阻器的电位差计、检测对应的液压缸的行程量的行程传感器、检测绕连结销的转动角度的旋转编码器、陀螺仪传感器、由加速度传感器和陀螺仪传感器的组合构成的惯性测量装置等。
26.在动臂缸7安装有动臂杆压力传感器s7r及动臂底部压力传感器s7b。在斗杆缸8安装有斗杆杆压力传感器s8r及斗杆底部压力传感器s8b。在铲斗缸9安装有铲斗杆压力传感器s9r及铲斗底部压力传感器s9b。将动臂杆压力传感器s7r、动臂底部压力传感器s7b、斗杆杆压力传感器s8r、斗杆底部压力传感器s8b、铲斗杆压力传感器s9r及铲斗底部压力传感器s9b统称为“缸压力传感器”。
27.动臂杆压力传感器s7r检测动臂缸7的杆侧油室的压力(以下,称为“动臂杆压力”。),动臂底部压力传感器s7b检测动臂缸7的底部侧油室的压力(以下,称为“动臂底部压力”。)。斗杆杆压力传感器s8r检测斗杆缸8的杆侧油室的压力(以下,称为“斗杆杆压力”。),斗杆底部压力传感器s8b检测斗杆缸8的底部侧油室的压力(以下,称为“斗杆底部压力”。)。铲斗杆压力传感器s9r检测铲斗缸9的杆侧油室的压力(以下,称为“铲斗杆压力”。),铲斗底部压力传感器s9b检测铲斗缸9的底部侧油室的压力(以下,称为“铲斗底部压力”。)。
28.振动传感器s10检测回转减速机20的振动。在本实施方式中,振动传感器s10由加速度传感器构成。也可以是利用了压电元件的声发射(ae)传感器。振动传感器s10构成为能
够以单触式装卸于回转减速机20,以便能够定期性地诊断回转减速机20。但是,振动传感器s10也可以固定于回转减速机20上,以便在挖土机100运转中也能够检测回转减速机20的振动。
29.在上部回转体3上设置有作为驾驶室的驾驶舱10,且搭载有发动机11等动力源。并且,在上部回转体3上安装有控制器30、显示装置40、输入装置42、声音输出装置43、存储装置47、测位装置p1、机体倾斜传感器s4、回转角速度传感器s5、摄像装置s6及通信装置t1。
30.控制器30作为进行挖土机100的驱动控制的主控制部而发挥作用。在本实施方式中,控制器30由包括cpu、ram、rom等的计算机构成。关于控制器30中的一种或多种功能,例如,通过由cpu执行存储于rom的程序来实现。
31.显示装置40显示信息。显示装置40可以经由can等通信网络与控制器30连接,也可以经由专用线与控制器30连接。
32.输入装置42使操作者能够向控制器30输入信息。输入装置42包括设置在驾驶舱10内的触摸面板、旋钮开关及薄膜开关等。
33.声音输出装置43是输出各种声音信息的装置。关于声音输出装置43,例如,可以是与控制器30连接的车载扬声器,也可以是蜂鸣器等警报器。在本实施方式中,声音输出装置43根据来自控制器30的声音输出指令而输出各种声音信息。
34.存储装置47是用于存储信息的装置。存储装置47例如是半导体存储器等非易失性存储介质。存储装置47可以存储在挖土机100的动作中一个或多个设备输出的信息,也可以存储在挖土机100的动作开始之前,经由一个或多个设备获取的或者所输入的信息。存储装置47例如也可以存储经由通信装置t1等获取的与目标施工面有关的数据。目标施工面可以由挖土机100的操作者进行设定,也可以由施工管理者等进行设定。
35.测位装置p1测定上部回转体3的位置及朝向。测位装置p1例如是gnss罗盘,检测上部回转体3的位置及朝向,并对控制器30输出检测值。因此,测位装置p1能够作为检测上部回转体3的朝向的朝向检测装置而发挥作用。朝向检测装置可以是安装在上部回转体3上的方位传感器。
36.机体倾斜传感器s4检测上部回转体3相对于水平面的倾斜。在本实施方式中,机体倾斜传感器s4是检测绕上部回转体3的前后轴的前后倾斜角及绕左右轴的左右倾斜角的加速度传感器。上部回转体3的前后轴及左右轴例如在挖土机100的回转轴上的一个点即在挖土机中心点处彼此正交。机体倾斜传感器s4可以是由加速度传感器与陀螺仪传感器的组合构成的惯性测量装置。
37.回转角速度传感器s5检测上部回转体3的回转角速度及回转角度。在本实施方式中为陀螺仪传感器。也可以是分解器、旋转编码器等。
38.摄像装置s6获取挖土机100的周边的图像。在本实施方式中,摄像装置s6包括:拍摄挖土机100的前方的空间的前摄像机s6f、拍摄挖土机100的左侧的空间的左摄像机s6l、拍摄挖土机100的右侧的空间的右摄像机s6r及拍摄挖土机100的后方的空间的后摄像机s6b。
39.摄像装置s6例如是具有ccd、cmos等成像元件的单眼摄像机,将所拍摄到的图像输出至显示装置40。摄像装置s6可以是立体摄像机、距离图像摄像机等。
40.前摄像机s6f例如安装在驾驶舱10的顶棚,即安装在驾驶舱10的内部。但是,也可
以安装在驾驶舱10的舱顶、动臂4的侧面等驾驶舱10的外部。左摄像机s6l安装在上部回转体3的上表面左端,右摄像机s6r安装在上部回转体3的上表面右端,后摄像机s6b安装在上部回转体3的上表面后端。
41.通信装置t1控制与位于挖土机100的外部的外部设备的通信。在本实施方式中,通信装置t1控制经由卫星通信网、移动电话通信网、因特网等与外部设备的通信。
42.图2是一实施方式的挖土机的管理系统300的框图。另外,分别以双重线、实线、虚线、点线及单点划线示出机械动力传递线路、工作油管路、先导管路、电控制线路及通信线路。
43.挖土机100的基本系统主要包括发动机11、调节器13、主泵14、先导泵15、控制阀17、操作装置26、吐出压力传感器28、操作压力传感器29、控制器30等。
44.发动机11是挖土机的驱动源。在本实施方式中,发动机11例如是以维持规定的转速的方式进行动作的柴油发动机。并且,发动机11的输出轴与主泵14及先导泵15的输入轴相连结。
45.主泵14经由工作油管路将工作油供给至控制阀17。在本实施方式中,主泵14是斜板式可变容量型液压泵。
46.调节器13控制主泵14的吐出量。在本实施方式中,调节器13根据来自控制器30的控制指令来调节主泵14的斜板偏转角,由此控制主泵14的吐出量。例如,控制器30接收操作压力传感器29等的输出,根据需要对调节器13输出控制指令,而改变主泵14的吐出量。
47.先导泵15经由先导管路向包括操作装置26的一个或多个液压设备供给工作油。在本实施方式中,先导泵15是固定容量型液压泵。
48.控制阀17是控制挖土机中的液压系统的液压控制装置。在本实施方式中,控制阀17构成为包括多个控制阀的阀块。控制阀17通过一个或多个控制阀,将主泵14吐出的工作油选择性地供给至一个或多个液压致动器。控制阀控制从主泵14流向液压致动器的工作油的流量及从液压致动器流向工作油罐的工作油的流量。液压致动器包括动臂缸7、斗杆缸8、铲斗缸9、左侧行走用液压马达1l、右侧行走用液压马达1r及回转用液压马达2a。回转用液压马达2a也可以用作为电动致动器的回转用电动发电机替换。
49.操作装置26是操作者为了操作致动器而使用的装置。致动器包括液压致动器及电动致动器中的至少一个。在本实施方式中,操作装置26经由先导管路,将先导泵15吐出的工作油供给至控制阀17内的对应的控制阀的先导端口。供给至各先导端口的工作油的压力(先导压力)是对应于与各液压致动器对应的操作装置26的操作方向及操作量的压力。操作装置26构成为能够经由先导管路将先导泵15吐出的工作油供给至控制阀17内的对应的控制阀的先导端口。操作装置26例如包括未图示的左操作杆、右操作杆、左行走杆及右行走杆。
50.吐出压力传感器28检测主泵14的吐出压力。在本实施方式中,吐出压力传感器28对控制器30输出检测到的值。
51.操作压力传感器29检测使用了操作装置26的操作者的操作内容。在本实施方式中,操作压力传感器29将与各致动器对应的操作装置26的操作方向及操作量以压力的形式进行检测,对控制器30输出检测到的值。操作装置26的操作内容也可以使用操作压力传感器以外的其他传感器进行检测。
52.控制器30具有数据处理单元35、判定单元36及显示单元38作为功能要件。在本实施方式中,各功能要件作为软件而实现,但也可以通过硬件、固件等而实现。
53.数据处理单元35构成为处理信息获取装置所获取的信息。在本实施方式中,数据处理单元35处理信息获取装置所输出的数据,以使判定单元36及管理装置200的控制装置210分别能够利用信息获取装置所输出的数据。信息获取装置所获取的信息包括分别与动臂角度、斗杆角度、铲斗角度、前后倾斜角、左右倾斜角、回转角速度、回转角度、摄像装置s6拍摄到的图像、动臂杆压力、动臂底部压力、斗杆杆压力、斗杆底部压力、铲斗杆压力、铲斗底部压力、振动传感器s10检测到的回转减速机的振动、贴附于附属装置或框架的应变传感器的检测值、主泵14的吐出压力、操作装置26有关的操作压力等中的至少一个。而且,信息获取装置包括动臂角度传感器s1、斗杆角度传感器s2、铲斗角度传感器s3、机体倾斜传感器s4、回转角速度传感器s5、摄像装置s6、动臂杆压力传感器s7r、动臂底部压力传感器s7b、斗杆杆压力传感器s8r、斗杆底部压力传感器s8b、铲斗杆压力传感器s9r、铲斗底部压力传感器s9b、振动传感器s10、应变传感器(未图示)、吐出压力传感器28、操作压力传感器29等中的至少一个。只要判定单元36及控制装置210分别能够直接利用来自信息获取装置的数据,则可以省略数据处理单元35。
54.数据处理单元35构成为在规定时间内保持信息获取装置所输出的数据。在本实施方式中,数据处理单元35将信息获取装置所输出的数据至少在规定时间内暂时地记录于易失性存储介质。数据处理单元35可以将信息获取装置所输出的数据记录于存储装置47。
55.判定单元36构成为判定信息获取装置所输出的数据的集合(以下,称为“数据集”。)是否适于由后述的管理装置200的控制装置210进行的诊断。例如,判定单元36判定振动传感器s10所输出的数据集是否适于由控制装置210进行的诊断。这是为了防止不适于由控制装置210进行的诊断的数据集被供给至控制装置210。
56.显示单元38构成为在显示装置40上显示各种信息。在本实施方式中,根据来自控制器30的指令,在显示装置40上显示规定的画面。
57.管理装置200具备控制装置210、通信装置220及显示装置230。并且,控制装置210具有挖土机信息管理部211、疲劳度计算部212、繁忙期信息管理部213及保证内容決定部214作为功能要件。另外,控制装置210的各功能要件可以作为软件而实现,也可以通过硬件、固件等而实现。
58.挖土机信息管理部211构成为存储并管理信息获取装置所输出的数据集。数据集从挖土机100的通信装置t1发送,经由通信网络nw及通信装置220输入到挖土机信息管理部211。另外,在从通信装置t1发送的数据集中,也可以附加有在判定单元36中的判定结果。并且,也可以是从通信装置t1仅发送由判定单元36判定为适于诊断的数据集的结构。
59.疲劳度计算部212构成为根据存储于挖土机信息管理部211的数据集计算附属装置的疲劳度。在本实施方式中,疲劳度计算部212根据从挖土机100收集的运转信息,计算挖土机100的各组件的疲劳度。疲劳度包括挖土机100的各组件中积累的累计受损度及各组件的剩余寿命。在该评价中,利用到当前时刻为止存储装置203中积累的运转信息及累计受损度等。对组件中积累的累计受损度及剩余寿命的评价方法,在后面进行叙述。将累计受损度及剩余寿命的评价结果存储于挖土机信息管理部211。
60.繁忙期信息管理部213将时期和用于决定价格的繁忙期系数建立对应关联地进行
存储。例如,将时期分类为繁忙期、通常期、闲散期这3个阶段的繁忙期信息的情况下,可以将通常期中的系数设定为低于繁忙期中的系数,将闲散期的系数设定为低于通常期。例如,也可以将会计年度末那样的修补委托增加的时期设定为繁忙期。并且,也可以将挖土机100的运转率增大的时期设为繁忙期。
61.保证内容決定部214根据存储于挖土机信息管理部211的挖土机100的信息,决定保证内容。保证内容例如包括保证期间、修补费用及使用费用。用户例如通过访问管理装置200,能够在管理装置200的显示装置230上,显示保证内容的信息(以下,也称为“保证内容信息”。)等。
62.保证期间例如为动臂4、斗杆5、铲斗6等附属装置的保证期间。保证期间包括制造商保证等的无偿保证期间即通常保证期间和追加设定在通常保证期间的追加保证期间。保证期间根据通过疲劳度计算部212计算出的附属装置的疲劳度进行设定。例如,通过疲劳度计算部212计算出的附属装置的累计受损度越比基准累计受损度小,则追加保证期间设定得越长。基准累计受损度为使挖土机100以标准的作业内容进行工作时设想的累计受损度,例如根据挖土机100交货后经过的天数进行设定。并且,通过疲劳度计算部212计算出的附属装置的剩余寿命比基准剩余寿命越长,则追加保证期间设定得越长。基准剩余寿命为使挖土机100以标准的作业内容进行工作时设想的剩余寿命,例如根据挖土机100交货后经过的天数进行设定。标准的作业内容是以规定的比率(例如,1:1)进行例如如破碎器作业那样对结构部件的负荷大的作业(高负荷作业)和如修整作业、装载作业及平整作业那样对结构部件的负荷小的作业(低负荷作业)时的作业内容。
63.修补费用例如是动臂4、斗杆5、铲斗6等附属装置的修补费用。修补费用根据修补时期进行设定,所述修补时期根据在附属装置产生龟裂之后,通过疲劳度计算部212计算出的附属装置的剩余寿命来決定。例如,在附属装置产生龟裂之后立即进行修补的情况下,修补费用设定为在基准金额上追加了规定的第1比例增额的费用。并且,在附属装置产生龟裂之后,在剩余寿命的范围内继续使用规定期间(例如2天~1周)附属装置之后进行修补的情况下,修补费用设定为在基准金额上追加了低于第1比例增额的第2比例增额的费用。并且,在附属装置产生龟裂之后,以使剩余寿命变长的方式改变作业内容,且在该剩余寿命的范围内继续使用规定期间(例如1周~1个月)附属装置之后进行修补的情况下,修补费用设定为在基准金额上不追加比例增额的费用。此外,修补费用也可以是在基准金额上累计繁忙期信息管理部213的繁忙期系数的费用。
64.使用费用为挖土机100的使用费用,例如包括租赁挖土机100者向租赁公司支付的费用、从租赁公司向租赁挖土机100者退还的退还金。使用费用根据通过疲劳度计算部212计算出的疲劳度进行设定。例如,通过疲劳度计算部212计算出的附属装置的累计受损度比基准累计受损度越小,则退还金的额度设定得越高。基准累计受损度为使挖土机100以标准的作业内容进行工作时设想的累计受损度,例如根据租赁挖土机100者开始使用挖土机100之后经过的天数进行设定。并且,通过疲劳度计算部212计算出的附属装置的剩余寿命比基准剩余寿命越长,则退还金的额度设定的越高。基准剩余寿命为使挖土机100以标准的作业内容进行工作时设想的剩余寿命,例如根据租赁挖土机100者开始使用挖土机100之后经过的天数进行设定。
65.通信装置220构成为能够通过通信网络nw而与其他装置、例如挖土机100进行通
信。
66.显示装置230构成为显示各种信息。
67.参考图3,对计算挖土机100的疲劳度的处理(以下称为“疲劳度计算处理”。)进行说明。疲劳度计算处理由管理装置200的控制装置210来执行。图3是表示疲劳度计算处理的一例的流程图。
68.首先,在步骤st1中,管理装置200从附属装置的姿势传感器、附属装置的缸压力传感器及回转角速度传感器s5获取通过挖土机100在作业中重复进行的一系列动作的至少一个周期量的测定值。与这些测定值一起,获取作业种类、作业年月日、机体识别编号等信息。
69.从回转角速度传感器s5获取上部回转体3的回转角。根据附属装置的姿势传感器及回转角速度传感器s5的检测值,确定挖土机100的姿势。挖土机100的一系列动作中,通过附属装置的姿势传感器、附属装置的缸压力传感器及回转角速度传感器s5获取测定值的时间的范围可以由管理装置200的管理操作者进行设定,也可以由挖土机100的驾驶员或者维修人员进行设定。挖土机100中重复进行的一系列动作以例如包括挖掘开始、提升回转、排土、返回回转的工序为一个周期,重复进行该工序。
70.在步骤st2中,在一系列动作的一个周期内,提取应分析的多个时刻(以下,称为“分析时刻”。)。例如,提取缸体内的液压、回转角度的时间波形的峰、拐点等特征性的时刻作为分析时刻。若增加提取的分析时刻的个数,则分析精度提高,但分析所需的计算时间变长。管理装置200可以根据挖土机100的动作中的动臂缸7内的液压、斗杆5的前端的高度及回转角度的时间波形而自动提取分析时刻,也可以由操作者观察该时间波形来决定分析时刻,并输入分析时刻。
71.在步骤st3中,在各个分析时刻中,使用分析模型,计算施加在动臂4、斗杆5等各个组件上的应力分布。应力分布根据按每个分析时刻決定的挖土机100的确定姿势进行计算。即,按在重复进行的一系列动作的一个周期内出现的各种挖土机100的每个姿势,根据施加在挖土机100的组件上的荷载,计算应力分布。在应力分布的计算中,例如能够适用有限元法等数值分析方法。此时,将挖土机100的姿势及施加于挖土机100的组件的荷载用作分析条件。在此,荷载由矢量表示。荷载的大小及朝向通过液压缸内的液压、液压缸的轴向(附属装置的姿势)及回转角加速度求出。回转角加速度通过对回转角进行两次微分来计算。应力按构成分析模型的每个要件及节点计算。按每个分析时刻,且按每个组件计算应力分布的分析结果。
72.在步骤st4中,按各组件的评价点,计算一个周期的动作期间中所积累的受损度(以下,称为“单周期受损度”。)。由此,可以获得组件内的单周期受损度的分布。单周期受损度根据从应力的时间变化提取的应力的极值进行计算。单周期受损度能够通过公知的方法进行计算。
73.在步骤st5中,计算组件的累计受损度及剩余寿命的分布。以下,对累计受损度及剩余寿命的计算方法进行说明。管理装置200按管理对象的挖土机100的每个机体及每个组件,计算从机体的运转开始时刻到当前时刻为止的单周期受损度的总和(累计受损度)。将开始成为此次数据收集的对象的动作之前所积累的累计受损度存储于挖土机信息管理部211。当挖土机100的组件的、某个部位的累计受损度成为1时,在该部位产生断裂的可能性增大。通过从1减去累计受损度,可以求出剩余寿命。
74.在步骤st6中,将步骤st5中所求出的累计受损度及剩余寿命与机体识别编号等信息建立关联,并存储于挖土机信息管理部211中。
75.参考图4,对通过挖土机的管理系统300生成的显示画面的显示例进行说明。图4是表示一实施方式的显示画面的一例的图。另外,在以下的说明中,显示画面400显示在管理装置200的显示装置230上,并显示包括通过疲劳度计算处理计算出的剩余寿命和与该剩余寿命建立关联的保证期间的信息。
76.显示画面400具有保证期间显示部410、最弱部位显示部420及剩余寿命显示部430。在图4的例子中,从上方依次配置有保证期间显示部410、最弱部位显示部420及剩余寿命显示部430。但是,保证期间显示部410、最弱部位显示部420及剩余寿命显示部430的配置并不限定于图4所示的配置。
77.保证期间显示部410显示与附属装置的保证期间有关的信息。在图4的例子中,在保证期间显示部410中,显示有表示附属装置的通常保证期间的条状标尺(bar gauge)411及表示追加保证期间的条状标尺412。通常保证期间例如是制造商保证等无偿保证期间,根据预先设定的保证期间进行显示。追加保证期间根据通过疲劳度计算处理计算出的附属装置的剩余寿命进行显示。
78.例如,通过疲劳度计算处理计算出的附属装置的剩余寿命比基准剩余寿命长的情况下,表示追加保证期间的条状标尺412以与所计算出的剩余寿命和基准剩余寿命之差对应的长度,显示在表示通常保证期间的条状标尺411的右侧。另一方面,通过疲劳度计算处理计算出的附属装置的剩余寿命比基准剩余寿命短的情况下,不显示表示追加保证期间的条状标尺412。基准剩余寿命为使挖土机100以标准的作业内容进行工作时设想的剩余寿命,例如根据挖土机100交货后经过的天数进行设定。标准的作业内容是以规定的比率(例如,1:1)进行例如如破碎器作业那样对结构部件的负荷大的作业(高负荷作业)和如修整作业、装载作业及平整作业那样对结构部件的负荷小的作业(低负荷作业)时的作业内容。
79.并且,在图4的例子中,为了容易地区分通常保证期间和追加保证期间,以实线显示表示通常保证期间的条状标尺411,以虚线显示表示追加保证期间的条状标尺412。但是,通常保证期间和追加保证期间的显示方法并不限定于此,例如也可以用颜色区分显示。
80.最弱部位显示部420显示确定附属装置的最弱部位的信息。在图4的例子中,在最弱部位显示部420中,显示有斗杆5的图像421、确定斗杆5中的最弱部位的图像422、动臂4的图像423及确定动臂4中的最弱部位的图像424。斗杆5中的最弱部位及动臂4中的最弱部位根据通过疲劳度计算处理计算出的疲劳度(例如,累计受损度、剩余寿命)的分布进行显示。例如,斗杆5中的最弱部位及动臂4中的最弱部位是在通过疲劳度计算处理计算出的累计受损度的分布中,累计受损度最大的部位。并且,例如斗杆5中的最弱部位及动臂4中的最弱部位是在通过疲劳度计算处理计算出的剩余寿命的分布中,剩余寿命最短的部位。另外,在图4的例子中,斗杆5的图像421及动臂4的图像422左右排列显示,但并不限定于此,例如也可以上下排列表示。并且,也可以只显示斗杆5的图像421和动臂4的图像422中的任意一个。
81.剩余寿命显示部430显示附属装置的剩余寿命。在图4的例子中,在剩余寿命显示部430中,显示有表示当前的斗杆5的剩余寿命的条状标尺431及表示当前的动臂4的剩余寿命的条状标尺432。斗杆5的剩余寿命及动臂4的剩余寿命根据通过疲劳度计算处理计算出的剩余寿命的分布进行显示。例如,当前的斗杆5的剩余寿命及当前的动臂4的剩余寿命分
别可以是通过疲劳度计算处理计算出的剩余寿命的分布中的最短剩余寿命,也可以是平均值或中位数。并且,在剩余寿命显示部430中,也可以与表示当前的斗杆5的剩余寿命的条状标尺431及表示当前的动臂4的剩余寿命的条状标尺432重叠地显示有表示基准剩余寿命的图像。通过显示表示基准剩余寿命的图像,管理者能够容易地掌握相对于基准剩余寿命的当前的剩余寿命。并且,在剩余寿命显示部430中,也可以代替附属装置的剩余寿命,或与剩余寿命一起显示附属装置的累计受损度。
82.如以上所说明的那样,根据一实施方式的管理系统300,如图4所示,将附属装置的剩余寿命(或者,累计受损度)与保证期间建立关联而进行显示。由此,管理者能够根据显示于显示装置230的显示画面400的信息,设定与挖土机100的使用状况对应的保证期间。例如,管理者能够在显示于显示装置230的显示画面400的附属装置的剩余寿命比基准剩余寿命长的情况下,设定在附属装置的通常保证期间附加了追加保证期间的保证期间。
83.在图4的事例中,例如,是将保证期间设为5000小时的情况下,利用了保证期间内的80%(4000小时)的事例。即使在这种情况下,若进行负荷小的作业,则在作为基准设定的保证期间内保证的基准剩余寿命(100%)中,动臂4、斗杆5的剩余寿命还剩60%左右。即,仅利用了40%左右。因此,在利用了保证期间内的80%(4000小时)的时刻,能够设定1500小时(130%)的追加保证期间。
84.另外,在图4的例子中,示出了在管理装置200的显示装置230上显示包括附属装置的剩余寿命和保证期间的信息的情况,但本发明并不限定于此,例如也可以在挖土机100的显示装置40上显示。并且,也可以在能够通过通信网络nw而与管理装置200进行通信的其他装置上显示。
85.并且,在图4的例子中,在显示装置230的显示画面400上,示出了将附属装置的剩余寿命与保证期间建立关联而进行显示的情况,但本发明并不限定于此,例如也可以将附属装置的累计受损度与保证期间建立关联而进行显示。此时,管理者能够在显示于显示装置230的显示画面400的附属装置的累计受损度比基准累计受损度小的情况下,设定在附属装置的通常保证期间附加了追加保证期间的保证期间。
86.并且,也可以在显示画面400上显示日期和时间、设备编号、使用者、到目前为止的使用时间(未图示)。
87.参考图5,对通过挖土机的管理系统300生成的显示画面的另一显示例进行说明。图5是表示一实施方式的显示画面的另一例的图。另外,在以下的说明中,显示画面500显示在管理装置200的显示装置230上,并显示包括通过疲劳度计算处理计算出的剩余寿命和与该剩余寿命建立关联的修补费用的信息。
88.显示画面500具有剩余寿命显示部510、修补费用显示部520、最弱部位显示部530。在图5的例子中,从上方依次配置有剩余寿命显示部510、修补费用显示部520及最弱部位显示部530。但是,剩余寿命显示部510、修补费用显示部520及最弱部位显示部530的配置并不限定于图5所示的配置。
89.剩余寿命显示部510显示附属装置的剩余寿命。在图5的例子中,在剩余寿命显示部510上,显示有条状标尺511、条状标尺512、图形513~图形515。条状标尺511显示以当前的作业内容(当前业内容)继续使用挖土机100时的附属装置的剩余寿命。条状标尺512表示为了延长剩余寿命而从当前的作业内容改变为推荐的作业内容(推荐作业内容)来使用挖
土机100时的附属装置的剩余寿命。关于推荐作业内容,例如,对于地基挖掘作业的挖土机改变为搬出作业等。对于正在进行岩盘作业的挖土机,改变为平地挖掘等。图形513~图形515表示分别不同的修补时期。图形513表示在附属装置产生龟裂之后立即进行修补的时期(或者,龟裂产生的时刻)。图形514表示在附属装置产生龟裂之后,以当前的作业内容继续使用挖土机100时的剩余寿命的范围内的期间(例如2天~1周)。图形515表示在附属装置产生龟裂之后,为了延长剩余寿命而从当前的作业内容改变为推荐的作业内容时的剩余寿命的范围内的期间(例如1周~1个月)。以当前的作业继续使用挖土机100时的附属装置的剩余寿命及以推荐的作业使用挖土机100时的附属装置的剩余寿命根据通过疲劳度计算处理计算出的剩余寿命进行显示。例如,以当前的作业继续使用挖土机100时的附属装置的剩余寿命及以推荐的作业使用挖土机100时的附属装置的剩余寿命,分别可以是通过疲劳度计算处理计算出的剩余寿命的分布中的最短剩余寿命,也可以是平均值或中位数。
90.修补费用显示部520显示与附属装置的修补费用有关的信息。在图5的例子中,在修补费用显示部520中,显示有条状标尺521~条状标尺523。条状标尺521表示在显示于剩余寿命显示部510的图形513中所示的时期,对附属装置进行修补时的修补费用。以条状标尺521表示的修补费用是在基准金额521a上追加了规定的第1比例增额521b的费用。条状标尺522表示在显示于剩余寿命显示部510的图形514中所示的期间,对附属装置进行修补时的修补费用。以条状标尺522表示的修补费用是在基准金额522a上追加了低于第1比例增额521b的第2比例增额522b的费用。条状标尺523表示在显示于剩余寿命显示部510的图形515中所示的期间,对附属装置进行修补时的修补费用。以条状标尺523表示的修补费用是在基准金额523a上不追加比例增额的费用。并且,基准金额521a、基准金额522a、基准金额523a、第1比例增额521b及第2比例增额522b也可以累积繁忙期信息管理部213的繁忙期系数。
91.最弱部位显示部530显示确定附属装置的最弱部位的信息。在图5的例子中,在最弱部位显示部530中,显示有表示动臂4中的当前时刻下的最弱部位的图像531及表示改变为推荐的作业内容时所预测的动臂4中的最弱部位的图像532。动臂4中的最弱部位根据通过疲劳度计算处理计算出的疲劳度(例如,累计受损度、剩余寿命)的分布进行显示。例如,动臂4中的最弱部位是在通过疲劳度计算处理计算出的累计受损度的分布中,累计受损度最大的部位。并且,例如动臂4中的最弱部位是在通过疲劳度计算处理计算出的剩余寿命的分布中,剩余寿命最短的部位。另外,在图5的例子中,表示动臂4中的当前时刻下的最弱部位的图像531及表示改变为推荐的作业内容时所预测的动臂4中的最弱部位的图像532被左右排列显示,但并不限定于此,例如也可以上下排列显示。
92.如以上所说明的那样,根据一实施方式的管理系统300,如图5所示,可以将附属装置的剩余寿命与修补费用建立关联而进行显示。由此,管理者能够根据显示于显示装置230的显示画面500的信息,设定与挖土机100的使用状况对应的修补费用。例如,管理者能够根据显示于显示装置230的显示画面500的附属装置的剩余寿命及修补时期,设定在基准金额上追加了比例增额的修补费用。并且,也可以将作业内容与修补费用建立关联。并且,也可以将作业内容与剩余寿命建立关联。并且,也可以将作业内容与保证期间建立关联。
93.另外,在图5的例子中,示出了在管理装置200的显示装置230上显示包括附属装置的剩余寿命和修补费用的信息的情况,但本发明并不限定于此,例如也可以在挖土机100的显示装置40上显示。并且,也可以在能够通过通信网络nw而与管理装置200进行通信的其他
装置上显示。
94.并且,也可以在显示画面500上显示日期和时间、设备编号、使用者、到目前为止的使用时间(未图示)。
95.参考图6,对通过挖土机的管理系统300生成的显示画面的又一显示例进行说明。图6是表示一实施方式的显示画面的又一例的图。另外,在以下的说明中,显示画面600显示在管理装置200的显示装置230上,显示包括通过疲劳度计算处理计算出的累计受损度和与该累计受损度建立关联的使用费用的信息。
96.显示画面600具有使用费用显示部610、最弱部位显示部620及累计受损度显示部630。在图6的例子中,从上方依次配置有使用费用显示部610、最弱部位显示部620及累计受损度显示部630。但是,使用费用显示部610、最弱部位显示部620及累计受损度显示部630的配置并不限定于图6所示的配置。
97.使用费用显示部610显示与挖土机100的使用费用相关的信息。在图6的例子中,在使用费用显示部610中,显示有表示租赁挖土机100者向租赁公司支付的费用的条状标尺611及表示从租赁公司向租赁挖土机100者退还的退还金的条状标尺612。表示退还金的条状标尺612根据通过疲劳度计算处理计算出的疲劳度(例如,累计受损度、剩余寿命)进行显示。例如,通过疲劳度计算处理计算出的附属装置的累计受损度比基准累计受损度越小,则表示退还金的条状标尺612就以越长的条状标尺显示。
98.最弱部位显示部620显示确定附属装置的最弱部位的信息。在图6的例子中,在最弱部位显示部620中,显示有斗杆5的图像621、确定斗杆5中的最弱部位的图像622、动臂4的图像623及确定动臂4中的最弱部位的图像624。斗杆5中的最弱部位及动臂4中的最弱部位根据通过疲劳度计算处理计算出的疲劳度(例如,累计受损度、剩余寿命)的分布进行显示。例如,斗杆5中的最弱部位及动臂4中的最弱部位是在通过疲劳度计算处理计算出的累计受损度的分布中,累计受损度最大的部位。并且,例如斗杆5中的最弱部位及动臂4中的最弱部位是在通过疲劳度计算处理计算出的剩余寿命的分布中,剩余寿命最短的部位。另外,在图6的例子中,斗杆5的图像621及动臂4的图像622左右排列显示,但并不限定于此,例如也可以上下排列表示。并且,也可以只显示斗杆5的图像621和动臂4的图像622中的任意一个。
99.累计受损度显示部630显示附属装置的累计受损度。在图6的例子中,在累计受损度显示部630中,显示有表示当前的斗杆5的累计受损度的条状标尺631及表示当前的动臂4的累计受损度的条状标尺632。斗杆5的剩余寿命及动臂4的剩余寿命根据通过疲劳度计算处理计算出的累计受损度的分布进行显示。例如,当前的斗杆5的累计受损度及当前的动臂4的累计受损度分别可以是通过疲劳度计算处理计算出的累计受损度的分布中的最大累计受损度,也可以是平均值或中位数。并且,在累计受损度显示部630中,也可以与表示当前的斗杆5的累计受损度的条状标尺631及表示当前的动臂4的累计受损度的条状标尺632重叠地显示有表示基准累计受损度的图像。通过显示表示基准累计受损度的图像,管理者能够容易地掌握相对于基准累计受损度的当前的累计受损度。
100.如以上所说明的那样,根据一实施方式的管理系统300,如图6所示,将附属装置的累计受损度与使用费用建立关联而进行显示。由此,管理者能够根据在显示装置230的显示画面400上显示的信息,设定与挖土机100的使用状况对应的使用费用。例如,在显示于显示装置230的显示画面400的规定期间(例如,租赁期间)内的附属装置的累计受损度比基准累
计受损度大的情况下,管理者能够根据规定期间内的附属装置的累计受损度与基准累计受损度之差,设定退还挖土机100的使用费用的一部分的退还金。
101.在图6的事例中,是将预测的使用状况(作业内容、累计受损度等)与实绩进行对比的事例。在图6的事例中,例如,是在使用期间终止的时刻,未达到基准累计受损度(例如100%)的情况下(例如60%),退还使用费用20%的事例。即,是在未达到开始使用时所设想的累计受损度的情况下,根据未达到的程度,退还使用费用的事例。通过能够将剩余寿命(或者,累计受损度)与修补费用建立关联,也能够将剩余寿命(或者,累计受损度)与使用费用建立关联。也可以将作业内容和使用费用建立关联。也可以将作业内容和保证期间建立关联。
102.另外,在图6的例子中,示出了在管理装置200的显示装置230上显示包括附属装置的累计受损度和使用费用的信息的情况,但本发明并不限定于此,例如也可以在挖土机100的显示装置40上显示。并且,也可以在能够通过通信网络nw而与管理装置200进行通信的其他装置上显示。
103.并且,在图6的例子中,在显示装置230的显示画面400中,示出了将附属装置的累计受损度和使用费用建立关联而进行显示的情况,但本发明并不限定于此,例如也可以将附属装置的剩余寿命与使用费用建立关联而进行显示。此时,在显示于显示装置230的显示画面400上的附属装置的剩余寿命比基准剩余寿命长的情况下,管理者能够根据规定期间内的附属装置的剩余寿命与基准剩余寿命之差,设定退还挖土机100的使用费用的一部分的退还金。
104.并且,也可以在显示画面600上显示日期和时间、设备编号、使用者、到目前为止的使用时间(未图示)。
105.以上,对本发明的优选实施方式进行了说明,但本发明并不限于上述实施方式,能够在不脱离本发明的范围的情况下,对上述实施方式施加各种改变及替换。
106.例如,作为管理系统300的显示装置,可以利用移动终端等支援装置。典型地,支援装置为便携式终端装置,例如是在施工现场的工作人员等所携带的笔记本pc、平板pc或智能手机等。支援装置也可以是挖土机100的操作者所携带的计算机。支援装置也可以是固定终端装置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。