1.本实用新型涉及一种剪切装置,尤其涉及一种塑身衣布料剪切装置。
背景技术:
2.塑身衣根据人体工程学原理的立体剪材更符合人体结构特点,调整体内脂肪分布,塑造优美曲线。弹力衣,也叫塑身衣、紧身衣、束身衣、美体衣,塑形衣等,是一种功能性服装。其采用弹性面料,依人体曲线剪裁,紧贴皮肤。
3.塑身衣在加工制作前需要把布料剪切成已经测量好的尺寸,然后再上机进行隔断剪切,由于塑身衣布料带有弹性,不适于批量剪切,需要隔成一段一段的进行剪切工作,目前塑身衣加工布料剪切,是由人工使用剪刀进行剪切或者使用简单的手动剪切机进行剪切。
4.目前塑身衣的手动剪切机是由上下刀具组成,剪切时需要人工把布料放置在上下刀具之间,然后拉到所需剪切的尺寸在进行剪切工作,每次剪切均需要人工配合剪切机进行工作,剪切速度较慢。
5.针对上述问题我们非常需要研制一种可自动放置布料、自动剪切塑身衣布料的剪切装置。
技术实现要素:
6.本实用新型的目的是:提供一种可自动放置布料、自动剪切塑身衣布料的剪切装置,用于克服目前塑身衣的手动剪切机是由上下刀具组成,剪切时需要人工把布料放置在上下刀具之间,然后拉到所需剪切的尺寸在进行剪切工作,每次剪切均需要人工配合剪切机进行工作,剪切速度较慢的缺点。
7.本实用新型的技术方案是:一种塑身衣布料剪切装置,包括有机体底座、往复拉布装置、往复割布装置和布料安放装置,机体底座上设置有往复拉布装置、往复割布装置和布料安放装置,往复拉布装置安装于机体底座前侧,往复割布装置设置于机体底座位于往复拉布装置的一侧,往复割布装置上的部分部件与往复拉布装置连接,布料安放装置设置于机体底座靠近往复割布装置一侧。
8.可选地,往复拉布装置包括有第一电机、输出轴、第一圆盘、连杆、第一偏心轴、电动夹手、轨道板、固定滑块和第二连杆,机体前侧的第一电机转动输出轴带动第一圆盘,第一圆盘与第一连杆和第一偏心轴铰接,推动电动夹手,电动夹手通过两侧轨道板,固定滑块在第二连杆铰接下实现往复拉布。
9.可选地,往复割布装置包括有布刀底座、第二电机、第二圆盘、第三连杆、第二偏心轴、切割用v型割布刀、v型割布轨和v型割布刀刀槽,机体底座后端的布刀底座上有支撑座,支撑座上固定有第二电机,第二电机转动时第二圆盘通过第三连杆与第二偏心轴铰接实现切割用v型割布刀沿着两侧v 型割布刀刀轨到v型割布刀刀槽完成切割的往复运动。
10.可选地,布料安放装置包括有支撑板和卡板,支撑板固定在机体底座上,卡板可拆
卸的安装支撑板上。
11.可选地,还包括有往复夹布装置,往复夹布装置通过齿轮组件和正反往复组件与第一电机的输出轴连接;往复夹布装置包括有支撑架、第一缺齿轮、第四连杆、固定板、第五连杆、第六连杆和夹布板,支撑架固定在机体底座上,第一缺齿轮转动连接在支撑架上,第一缺齿轮上固定连接着第四连杆,通过第一电机带动第一锥齿轮、第二锥齿轮、第三锥齿轮、第四锥齿轮、第五锥齿轮、第六锥齿轮和第二齿轮传来的动力使固定板上铰接的第五连杆和与第四连杆铰接的第六连杆带动夹布板实现往复夹布的运动。
12.可选地,齿轮组件包括有第一锥齿轮、第一固定短板、第二轴、第二锥齿轮、第一固定长板、第三锥齿轮、第二固定短板、第三轴、第四锥齿轮和第五锥齿轮,第一固定短板固定机体底座上,第二轴的前端固定有第二锥齿轮,第二锥齿轮与第一锥齿轮啮合,机体底座右前端的第一固定长板,下方有第三锥齿轮并且与第二固定短板上通过第三轴连接的第四锥齿轮成啮合状态,第五锥齿轮通过第三轴连接在第一固定长板上方与第六锥齿轮啮合。
13.可选地,正反往复组件包括有第二固定长板、第四轴、第六锥齿轮、第二缺齿轮、第五轴、第一齿轮、第六轴和第二齿轮,第二固定长板在第一固定长板的后边,通过第四轴上与第五锥齿轮啮合的第六锥齿轮带动第二缺齿轮正转,第五轴与第四轴是对称关系,第五轴后端连接有第一齿轮,第一齿轮与第四轴上的齿轮啮合实现反转,带动与第二缺齿轮对称的缺齿轮反转,第六轴转动连接在第二固定长板的对称侧,一端连接着第二齿轮,第二齿轮与能正、反转动的缺齿轮啮合,前端与支撑架上转动连接的第一缺齿轮对称的齿轮连接,通过连杆使夹布板实现松、夹动作。
14.有益效果
15.1.本实用新型通过布料安放装置可以快速更换需要剪切的布料;通过往复拉布装置可以实现快速把需要剪切的布料,拉至往复割布装置内,通过往复割布装置可快速把布料剪切完毕;
16.2.电动夹手闭合夹紧两端布料,然后电动夹手在第一圆盘的旋转下向远离往复割布装置一侧移动,当移动到极限位置时,往复割布装置启动把布料剪断,由此替代了人工拉动布料的功能,大大提高了工作效率,安全性高;
17.3.当往复拉布装置中的电动夹手闭合夹紧两端布料回来时,往复夹布装置松开布料,往复割布装置剪切布料,往复夹布装置再一次夹住布料的两端,等待下一次电动夹手闭合夹紧布料,由此实现了替代人工手拿两端布料的功能,使电动夹手夹持布料更加精准。
附图说明
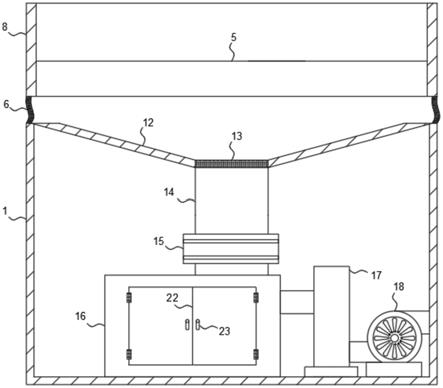
18.图1为本实用新型的一种立体式结构示意图;
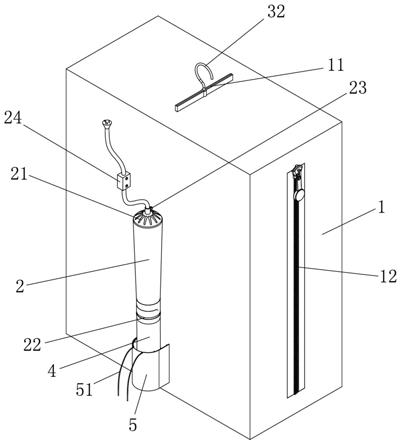
19.图2为本实用新型的往复拉布装置结构示意图;
20.图3为本实用新型的往复拉布装置放大结构示意图;
21.图4为本实用新型的齿轮组件放大结构示意图;
22.图5为本实用新型的正反往复组件放大结构示意图。
23.附图中的标记:1:机体底座,2:往复拉布装置,201:第一电机,202:输出轴,203:第一圆盘,204:第一连杆,205:第一偏心轴,206:电动夹手,207:轨道板,208:固定滑块,209:第二连杆,3:往复割布装置,301:布刀底座,302:支撑座,303:第二电机,304:第二圆盘,
305:第三连杆, 306:第二偏心轴,307:切割用v型割布刀,308:v型割布刀刀轨,309:v 型割布刀刀槽,4:布料安放装置,401:支撑板,402:第一轴,403:卡板, 5:往复夹布装置,501:支撑架,502:第一缺齿轮,503:第四连杆,504:固定板,505:第五连杆,506:第六连杆,507:夹布板,6a:齿轮组件,601:第一锥齿轮,602:第一固定短板,603:第二轴,604:第二锥齿轮,605:第一固定长板,606:第三锥齿轮,607:第二固定短板,608:第三轴,609:第四锥齿轮,610:第五锥齿轮,6b:正反往复组件,611:第二固定长板, 612:第四轴,613:第六锥齿轮,614:第二缺齿轮,615:第五轴,616:第一齿轮,617:第六轴,618:第二齿轮。
具体实施方式
24.以下参照附图对本实用新型的实施方式进行说明。
25.实施例1
26.如图1所示,一种塑身衣布料剪切装置,包括有机体底座1、往复拉布装置2、往复割布装置3和布料安放装置4,机体底座1中部开有下布料的开口,机体底座1上方前侧设置有往复拉布装置2,往复割布装置3在机体底座1 上,其位于往复拉布装置2的后侧,往复割布装置3上的部分部件与往复拉布装置2连接,布料安放装置4设置于机体底座1上方后侧,其位于往复割布装置3后侧。
27.使用时,首先把需要剪切的布通过轴安装在布料安放装置4上,然后人工拉出布的两端至往复割布装置3一侧,然后控制往复拉布装置2夹紧布的两端向远离布料安放装置4一侧移动,当往复拉布装置2移动到极限时,控制往复割布装置3把布剪断,剪断后的布料从机体底座1中部开口落下,开口下方可以放置可收集布料的盒子。
28.往复拉布装置2包括有第一电机201、输出轴202、第一圆盘203、连杆、第一偏心轴205、电动夹手206、轨道板207、固定滑块208和第二连杆209,机体前侧的第一电机201转动输出轴202带动第一圆盘203,第一圆盘203 与第一连杆204和第一偏心轴205铰接,推动电动夹手206,电动夹手206 通过两侧轨道板207,固定滑块208在第二连杆209铰接下实现往复拉布。
29.往复拉布装置2启动时,控制第一电机201启动,第一电机201的输出轴202带动第一圆盘203旋转,第一圆盘203旋转通过第一偏心轴205与第一圆盘203偏心位置滑动连接的第一连杆204带动第二连杆209、固定滑块 208和电动夹手206往复移动,当电动夹手206移动到往复割布装置3一侧时,因为与第一圆盘203滑动连接的第一连杆204之间存在一端距离的空行程,所以电动夹手206会停顿1
‑
2秒,此时电动夹手206闭合夹紧两端布料,然后电动夹手206在第一圆盘203的旋转下向远离往复割布装置3一侧移动,当移动到极限位置时,往复割布装置3启动把布料剪断。
30.往复割布装置3包括有布刀底座301、第二电机303、第二圆盘304、第三连杆305、第二偏心轴306、切割用v型割布刀307、v型割布刀刀轨308 和v型割布刀刀槽309,机体底座1后端的布刀底座301上方中部固定连接有支撑座302,支撑座302上固定有第二电机303,第二电机303输出轴上固定连接有第二圆盘304,第二圆盘304通过第三连杆305与第二偏心轴306铰接实现切割用v型割布刀307沿着两侧v型割布刀刀轨308到v型割布刀刀槽 309完成切割的往复运动。
31.当电动夹手206闭合夹紧两端布料,电动夹手206在第一圆盘203的旋转下向远离
往复割布装置3一侧移动,当移动到极限位置时,启动第二电机 303,第二电机303输出轴202带动第二圆盘304旋转,第二圆盘304偏心位置铰接的第三连杆305带动切割用v型割布刀307沿着v型割布刀刀轨308 向下移动,当v型割布刀与v型割布刀刀槽309闭合时,布料剪切。
32.布料安放装置4包括有支撑板401和卡板403,支撑板401对称固定在机体底座1上方后侧,卡板403可拆卸的安装支撑板401上。
33.给支撑板401上放置布料时布料必须卷在第一轴402上,然后把第一轴 402两端放置于支撑板401上,然后闭合卡板403,在通过螺钉把卡板403与支撑板401固定。
34.实施例2
35.在实施例1的基础之上,如图1
‑
图5所示,还包括有往复夹布装置5,往复夹布装置5通过齿轮组件6a和正反往复组件6b与第一电机201的输出轴202连接;往复夹布装置5包括有支撑架501、第一缺齿轮502、第四连杆 503、固定板504、第五连杆505、第六连杆506和夹布板507,支撑架501 固定在机体底座1上方两侧,第一缺齿轮502转动连接在支撑架501上,第一缺齿轮502上固定连接着第四连杆503,通过第一电机201输出轴带动第一锥齿轮601、第二锥齿轮604、第三锥齿轮606、第四锥齿轮609、第五锥齿轮610、第六锥齿轮613和第二齿轮618传来的动力使固定板504上铰接的第五连杆505和与第四连杆503铰接的第六连杆506带动夹布板507实现往复夹布的运动。
36.把布料安放得当时,人工拉出布的两端至往复割布装置3一侧,当往复拉布装置2中的电动夹手206闭合夹紧两端布料回来时,往复夹布装置5松开布料,往复割布装置3剪切布料,往复夹布装置5再一次夹住布料的两端,等待下一次电动夹手206闭合夹紧布料,往复夹布装置5支撑架501上转动连接的第一缺齿轮502带动固定在上面的第四连杆503,通过第一电机201 输出轴202带动齿轮组件6a,动力使固定板504上铰接的第五连杆505和与第四连杆503铰接的第六连杆506带动夹布板507实现往复夹布的运动。
37.如图3
‑
图4所示,齿轮组件6a为对称设置,两侧齿轮组件6a相同,其中一个齿轮组件6a包括有第一锥齿轮601、第一固定短板602、第二轴603、第二锥齿轮604、第一固定长板605、第三锥齿轮606、第二固定短板607、第三轴608、第四锥齿轮609和第五锥齿轮610,第一锥齿轮601转动连接在电机输出轴202上,第一固定短板602固定机体底座1第一电机1的一侧,第二轴603的前端固定有第二锥齿轮604,第二锥齿轮604与第一锥齿轮601 啮合,机体底座1右前端的第一固定长板605,下方有第三锥齿轮606并且与第二固定短板607上通过第三轴608连接的第四锥齿轮609成啮合状态,第五锥齿轮610通过第三轴608连接在第一固定长板605上方与第六锥齿轮613 啮合。
38.带动夹布板507实现往复夹布的运动的动力是靠齿轮组件6a完成传输的,通过第一电机201带动第一锥齿轮601,与第一锥齿轮601啮合的第二锥齿轮604带动第二轴603另一端的第三锥齿轮606去与第四锥齿轮609啮合转动,此时,动力传输到第三轴608上,带动第三轴608另一端的第五锥齿轮610去转动,带动夹布板507实现往复夹布的运动的动力,就完成了动力传输。
39.正反往复组件6b包括有第二固定长板611、第四轴612、第六锥齿轮613、第二缺齿轮614、第五轴615、第一齿轮616、第六轴617和第二齿轮618,第二固定长板611在第一固定长板605的后边,通过第四轴612上与第五锥齿轮610啮合的第六锥齿轮613带动第二缺齿轮
614正转,第五轴615与第四轴612是对称关系,第五轴615后端连接有第一齿轮616,第一齿轮616 与第四轴612上的齿轮啮合实现反转,带动与第二缺齿轮614对称的缺齿轮反转,第六轴617转动连接在第二固定长板611的对称侧,一端连接着第二齿轮618,第二齿轮618与能正、反转动的缺齿轮啮合,前端与支撑架501 上转动连接的第一缺齿轮502对称的齿轮连接,通过连杆使夹布板507实现松、夹动作。
40.齿轮组件6a传输过来的动力被传送到第四轴612,第四轴612上与第五锥齿轮610啮合的第六锥齿轮613带动第二缺齿轮614正转,第五轴615与第四轴612是对称关系,第五轴615后端连接有第一齿轮616,第一齿轮616 与第四轴612上的齿轮啮合实现反转,带动与第二缺齿轮614对称的缺齿轮反转,第六轴617一端连接着第二齿轮618,第二齿轮618与能正、反转动的缺齿轮啮合,前端与支撑架501上转动连接的第一缺齿轮502对称的齿轮连接,构成正、反往复机构,通过连杆使夹布板507实现松、夹动作。
41.尽管已经示出和描述了本实用新型的实施例,但对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行变化,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。