1.本发明涉及一种缝纫设备,尤其涉及一种电子自适应压脚控制系统及其控制方法。
背景技术:
2.电控系统作为电脑自动缝纫机的大脑,是整套设备的核心部件,尤其随着电脑缝纫机、花样机和自动模板机的迅速发展和人力成本的提高,“机器换人”已成为不可逆转的趋势,尤其在服装这个典型的劳动力密集型行业。
3.现有技术主要开发多轴高精度智能缝制电控系统,应用于电脑花样机、智能模板机、智能平车、自动化特种缝制单元以及普通缝纫机的自动化改造上的压脚自适应控制。现有的缝纫机主要依靠机械结构,通过旋钮旋转改变压料弹簧的压力,从而改变压脚在缝制过程中对缝料的压力。然而,上述控制方式存在着一旦压力设定后,在缝制过程中无法随时改变的问题,如此对缝制过程中有厚薄差异的布料无法有效提供最佳送料压力,尤其现在缝制工序中出现高低差缝纫的情况越来越多,普通压脚无法满足这种高低差大的缝制需求,特别对自动缝制过程中不能停机手工调节的场合,使用本发明很好的解决了这些问题。
技术实现要素:
4.本发明旨在解决上述缺陷,提供一种电子自适应压脚控制系统及其控制方法。
5.为了克服背景技术中存在的缺陷,本发明解决其技术问题所采用的技术方案是:这种电子自适应压脚控制系统包括电子自适应系统控制板、闭环电机、传动转换装置、压脚和可伸缩霍尔探头,电子自适应系统控制板的输出连接闭环电机,闭环电机的输出连接传动转换装置,传动转换装置的输出连接压脚和可伸缩霍尔探头,可伸缩霍尔探头的输出连接至电子自适应系统控制板。
6.根据本发明的另一个实施例,进一步包括所述闭环电机包括带有光电编码器或磁编码器的步进电机或永磁同步电机。
7.根据本发明的另一个实施例,进一步包括所述光电编码器或磁编码器的输出连接电子自适应系统控制板。
8.根据本发明的另一个实施例,进一步包括所述可伸缩霍尔探头包括圆球状探头、伸缩装置和霍尔传感器。
9.自适应的高低缝压脚装置的控制方法包括:第一步,通电后,闭环电机先驱动压脚上升运动到原点位置,此时系统将编码器的计数清零,作为初始零点;第二步,传动转换装置切换到驱动可伸缩霍尔探头的控制,驱动可伸缩霍尔探头上升到原点位置,记下此时编码器的计数值x;第三步,操作人员铺好物料之后,压脚系统沿着缝制的轨迹走一遍,系统记录下整个轨迹上各点的编码器的计数值x1、x2
……
xn;
第四步,电子自适应系统控制板上的cpu利用优化的追赶算法把这些特征点拟合成一条高度曲线,在后续的缝制过程中,电机传动转换装置切换到驱动压脚上下运动。
10.根据本发明的另一个实施例,进一步包括所述轨迹上各点的编码器的计数值采集过程如下:到达记录点n后,闭环电机开始驱动可伸缩霍尔探头向下运动,当探头接触到物料表面之后,探头压缩,触发霍尔开关信号,此时系统控制闭环电机停止运动,记录下此时的编码器的计数值xn。
11.本发明的有益效果是:这种电子自适应压脚控制系统及其控制方法解决了现有压脚高低缝需要停机后手工调整压脚高度影响效率,又容易断针等问题,并且具有自动适配高低缝且操作方便的优点。
附图说明
12.下面结合附图和实施例对本发明进一步说明。
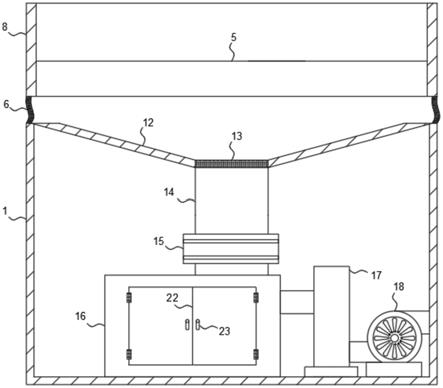
13.图1是本发明的结构示意图。
具体实施方式
14.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
15.这种电子自适应压脚控制系统包括电子自适应系统控制板、闭环电机、传动转换装置、压脚和可伸缩霍尔探头。
16.电子自适应系统控制板:1,处理各种输入输出信号;2,处理x/y/z等轴的运动控制信号,s型加减速处理,插补算法、运动前瞻等;3,与触摸屏通信,获取控制指令,回送设备的各个信号和设备状态。
17.如图1所示,电子自适应系统控制板的输出连接闭环电机,闭环电机的输出连接传动转换装置,传动转换装置的输出连接压脚和可伸缩霍尔探头,可伸缩霍尔探头的输出连接至电子自适应系统控制板。电机传动转换装置实现闭环电机驱动压脚和驱动可伸缩霍尔探头之间切换;压脚用来压住缝制面料避免缝制机针上下运动时候带料,所以压脚的高度控制非常关键,直接影响加工的质量;可伸缩霍尔探头包括圆球状探头、伸缩装置和霍尔传感器。
18.闭环电机包括带有光电编码器或磁编码器的步进电机或永磁同步电机。
19.光电编码器或磁编码器的输出连接电子自适应系统控制板。
20.可伸缩霍尔探头包括圆球状探头、伸缩装置和霍尔传感器。
21.控制方法:电源部分给控制主板和步进驱动器提供电源,额定功率200w,瞬时功率可达360w,上电开机后,闭环电机先驱动压脚上升运动到原点位置,此时系统将编码器的计数清零,作为初始零点。电机传动转换装置切换到驱动可伸缩霍尔探头的控制,驱动可伸缩霍尔探头上升到原点位置,记下此时编码器的计数值x。操作人员铺好物料之后,操作本电子自适应压脚
系统沿着缝制的轨迹走一遍,系统记录下整个轨迹上各点的编码器的计数值x1,x2
…
..xn,轨迹上各点的编码器的计数值采集过程如下:到达记录点n后,闭环电机开始驱动可伸缩霍尔探头向下运动,当探头接触到物料表面之后,探头压缩,触发霍尔开关信号,此时系统控制闭环电机停止运动,记录下此时的编码器的计数值xn。通过采集这些特征点的高度数据减去x,通过电子自适应系统控制板上的cpu利用优化的追赶算法把这些特征点拟合成一条高度曲线,在后续的缝制过程中,电机传动转换装置切换到驱动压脚上下运动,电子自适应系统控制板驱动闭环电机控制压脚沿我们拟合的高度曲线上升或下降,以贴合物料运动,既保证压脚跟物料之间没有摩擦,又能在缝纫机针上升的时候压住物料。
22.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
技术特征:
1.一种电子自适应压脚控制系统,包括电子自适应系统控制板、闭环电机、传动转换装置、压脚和可伸缩霍尔探头,其特征在于:所述电子自适应系统控制板的输出连接闭环电机,闭环电机的输出连接传动转换装置,传动转换装置的输出连接压脚和可伸缩霍尔探头,可伸缩霍尔探头的输出连接至电子自适应系统控制板。2.如权利要求1所述的电子自适应压脚控制系统,其特征在于:所述闭环电机包括带有光电编码器或磁编码器的步进电机或永磁同步电机。3.如权利要求2所述的电子自适应压脚控制系统,其特征在于:所述光电编码器或磁编码器的输出连接电子自适应系统控制板。4.如权利要求1所述的电子自适应压脚控制系统,其特征在于:所述可伸缩霍尔探头包括圆球状探头、伸缩装置和霍尔传感器。5.如权利要求1所述的电子自适应压脚控制系统的控制方法,其特征在于:该方法包括:第一步,通电后,闭环电机先驱动压脚上升运动到原点位置,此时系统将编码器的计数清零,作为初始零点;第二步,传动转换装置切换到驱动可伸缩霍尔探头的控制,驱动可伸缩霍尔探头上升到原点位置,记下此时编码器的计数值x;第三步,操作人员铺好物料之后,压脚系统沿着缝制的轨迹走一遍,系统记录下整个轨迹上各点的编码器的计数值x1、x2
……
xn;第四步,电子自适应系统控制板上的cpu利用优化的追赶算法把这些特征点拟合成一条高度曲线,在后续的缝制过程中,电机传动转换装置切换到驱动压脚上下运动。6.如权利要求1所述的电子自适应压脚控制系统的控制方法,其特征在于:所述轨迹上各点的编码器的计数值采集过程如下:到达记录点n后,闭环电机开始驱动可伸缩霍尔探头向下运动,当探头接触到物料表面之后,探头压缩,触发霍尔开关信号,此时系统控制闭环电机停止运动,记录下此时的编码器的计数值xn。
技术总结
本发明涉及缝纫设备的技术领域,尤其涉及一种电子自适应压脚控制系统及其控制方法。这种电子自适应压脚控制系统包括电子自适应系统控制板、闭环电机、传动转换装置、压脚和可伸缩霍尔探头,电子自适应系统控制板的输出连接闭环电机,闭环电机的输出连接传动转换装置,传动转换装置的输出连接压脚和可伸缩霍尔探头,可伸缩霍尔探头的输出连接至电子自适应系统控制板。这种电子自适应压脚控制系统及其控制方法解决了现有压脚高低缝需要停机后手工调整压脚高度影响效率,又容易断针等问题,并且具有自动适配高低缝且操作方便的优点。且具有自动适配高低缝且操作方便的优点。且具有自动适配高低缝且操作方便的优点。
技术研发人员:陈勤学 杨泰平 胡亮
受保护的技术使用者:常州佰肯智控科技有限公司
技术研发日:2020.03.26
技术公布日:2021/9/27
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。