技术特征:
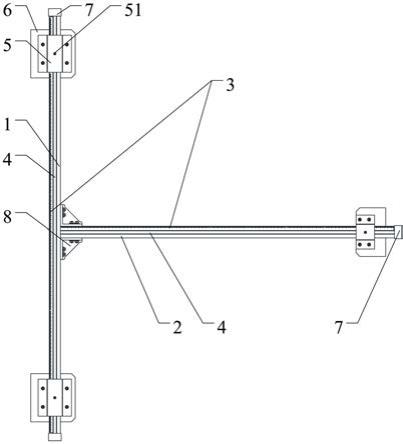
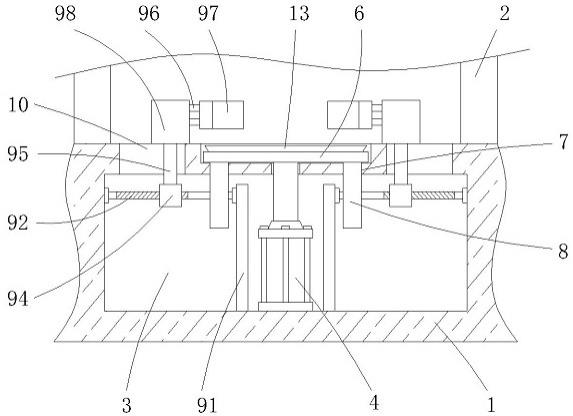
1.一种基于数控技术的激光焊接机,包括底板(1)、工作台(2)和围框(3),其特征在于:所述底板(1)的顶部安装有收集箱(103),所述收集箱(103)的顶部安装有工作台(2);所述工作台(2)的顶部安装有围框(3),所述工作台(2)的顶部安装有栅格架(301),且栅格架(301)的正面、背面及两侧外壁均与围框(3)的内壁贴合,所述围框(3)的顶部安装有固定板(302),所述固定板(302)的两侧外壁均设置有移动槽(303),所述固定板(302)的顶部安装有定位板(304),所述固定板(302)的正面和背面均安装有挡板(305);所述固定板(302)的两侧外壁均安装有两组并排布置的竖板(4),所述工作台(2)的顶部均匀安装有四组呈方形布置的支撑板(5),且四组支撑板(5)均匀环绕在围框(3)的外侧,其中一组所述支撑板(5)远离围框(3)的一侧外壁安装有双向电机(6)。2.根据权利要求1所述的一种基于数控技术的激光焊接机,其特征在于:所述支撑板(5)的顶部安装有顶板(502),所述顶板(502)的顶部安装有操作箱(7),所述操作箱(7)的底壁安装有转动电机(8),转动电机(8)的输出端安装有转轴,顶板(502)的顶部设置有旋转槽,旋转槽的内壁安装有嵌合转盘(801),且嵌合转盘(801)的顶部与转轴的底部贴合,嵌合转盘(801)的顶壁安装有电动伸缩筒(802),电动伸缩筒(802)的底部延伸出嵌合转盘(801)的内部,电动伸缩筒(802)的底部安装有机械臂(803),机械臂(803)的尾端安装有激光焊接头(804)。3.根据权利要求1所述的一种基于数控技术的激光焊接机,其特征在于:所述双向电机(6)的输出端安装有轴杆,轴杆的一端贯穿其中一组支撑板(5)的内部,轴杆的一端安装有螺纹柱(601),且螺纹柱(601)的一端贯穿另一组支撑板(5)的内部,另外两组支撑板(5)的一侧外壁安装有圆杆(602),且圆杆(602)位于螺纹柱(601)的后方,螺纹柱(601)的外表面通过螺纹嵌合安装有滑块(603),圆杆(602)的外表面安装有移动块(605),移动块(605)的正面安装有衔接板(604),且衔接板(604)的正面与滑块(603)的背面贴合,滑块(603)与移动块(605)的底部均安装有电动伸缩杆(606),电动伸缩杆(606)的底部安装有清扫刷(607)。4.根据权利要求1所述的一种基于数控技术的激光焊接机,其特征在于:所述工作台(2)的顶部设置有两组并列布置的通槽(201),且两组通槽(201)分别位于围框(3)的两侧,工作台(2)的底部均匀安装有四组呈方形布置的支撑杆(202),四组支撑杆(202)均匀环绕在收集箱(103)的外侧,且支撑杆(202)的底部与底板(1)的顶部贴合。5.根据权利要求1所述的一种基于数控技术的激光焊接机,其特征在于:所述竖板(4)靠近固定板(302)的一侧外壁设置有凹槽,凹槽的内壁安装有橡胶片板(401),竖板(4)远离固定板(302)的一侧外壁安装有螺纹杆(402),螺纹杆(402)的一端延伸进入移动槽(303)的内部,螺纹杆(402)的一端安装有圆板(403),竖板(4)一侧外壁安装有电动推杆(404),电动推杆(404)的一端贯穿竖板(4)的内部,电动推杆(404)的一端安装有挤压板(405),且挤压板(405)位于定位板(304)的上方,挤压板(405)远离电动推杆(404)的一侧外壁安装有橡胶垫。6.根据权利要求1所述的一种基于数控技术的激光焊接机,其特征在于:所述底板(1)的底部均匀安装有四组呈方形布置的支撑脚(101),底板(1)的顶部安装有n型围杆(102),且n型围杆(102)的内壁与收集箱(103)的外壁贴合。7.根据权利要求1所述的一种基于数控技术的激光焊接机,其特征在于:所述工作台
(2)的顶部安装有三组呈n型布置的围板(501),三组围板(501)和四组支撑板(5)布置成n字型形状,顶板(502)的顶部设置有槽口(503),槽口(503)的顶部安装有活动板(504),活动板(504)的底部贯穿槽口(503)的内部。8.根据权利要求2所述的一种基于数控技术的激光焊接机,其特征在于:所述操作箱(7)的内壁安装有两组分隔板(701),两组分隔板(701)分别位于转动电机(8)的两侧,两组分隔板(701)将操作箱(7)的内部空间从左至右分隔成空间一、空间二和空间三,空间一的底部安装有处理器(702),空间一的正面安装有显示面板(703),空间二的正面安装有控制面板(704)。9.根据权利要求1
‑
8任意一项所述的一种基于数控技术的激光焊接机,其特征在于:该装置的工作步骤如下:s1.工作人员需要对活动板(504)施加向上的推动力,而后将需要进行焊接的材料模板放置于定位板(304)的上方,且材料模板的正面与其中一组挡板(305)的背面贴合;s2.根据所放置的材料模板的尺寸大小,对竖板(4)与固定板(302)之间的贴合位置进行调整,将螺纹杆(402)外表面通过螺纹嵌合安装的螺母往外侧转动,促使竖板(4)与固定板(302)之间产生间距,而后根据材料模板的尺寸对竖板(4)施加推动力或者拉动力,促使螺纹杆(402)在移动槽(303)的内部移动,以调整竖板(4)与固定板(302)之间的接触位置,其位置确定后,将螺母往内侧转动,直至竖板(4)的一侧外壁与固定板(302)之间精密贴合即停止对螺母施加转动力;s3.定位板(304)两边的电动推杆(404)同步启动,促使电动推杆(404)带动挤压板(405)往焊接材料处移动,直至挤压板(405)的一侧外壁与焊接材料的外壁贴合即停止电动推杆(404)的运行,由于两组电动推杆(404)向外延伸的长度相同,致使材料模板的中心线与定位板(304)的中间线相互重叠,此时需要确定材料模板边缘处与定位板(304)相接触的坐标,而后将坐标信息通过显示面板(703)输入至处理器(702)的内部,同时工作人员需要将此材料模板的外形尺寸及焊接路径上传至处理器(702)中,将定位板(304)上的坐标与材料模板的外形尺寸相互对应,而后计算出焊接路径的各个点位坐标,便于达到精准焊接;s4.工作人员按压控制面板(704)上的启动按钮,启动本装置,而后在实际操作中转动电机(8)启动时,可促使其输出端所安装的转轴带动嵌合板(801)在旋转槽的内部转动,继而带动其底部所安装的各部件同频率转动,同时电动伸缩筒(802)启动后,可向下延伸或者向上收缩,其向下延伸时,可促使其底部所安装的机械臂(803)带动激光焊接头(804)向下移动,且机械臂(803)本身能够接收指令,其能够精确的定位到三维空间上的某一点进行作业,其与处理器(702)之间电性连接,可接收从处理器(702)处所传递的焊接路径的定位点;s5.焊接结束后,同步启动双向电机(6)和电动伸缩杆(606),双向电机(6)输出端所安装的轴杆可带动螺纹柱(601)转动,而后促使螺纹柱(601)外表面通过螺纹嵌合安装的滑块(603)向一侧移动,同时,其通过衔接板(604)将移动力传递至移动块(605)处,促使移动块(604)在圆杆(602)的外表面跟随滑块(603)同步移动,此时清扫刷(607)可跟随移动,电动伸缩杆(606)可带动其底部所安装的清扫刷(607)上下移动,清扫刷(607)可将工作台(2)和定位板(304)上方的焊渣通过通槽(201)扫落至收集箱(103)的内部,之后同一型号规格的被焊接材料直接按照材料模板所处的位置放于定位板(304)的上方,而后进行焊接操作。
技术总结
本发明公开了一种基于数控技术的激光焊接机,包括底板、工作台和围框,所述底板的顶部安装有收集箱,所述收集箱的顶部安装有工作台;所述工作台的顶部安装有围框,所述工作台的顶部安装有栅格架,且栅格架的正面、背面及两侧外壁均与围框的内壁贴合,所述围框的顶部安装有固定板,所述固定板的两侧外壁均设置有移动槽,所述固定板的顶部安装有定位板。本发明通过安装的定位板上均匀设置有多组X轴线和Y轴线,可辅助激光焊接头精准焊接,同时装置中激光焊接头的顶部安装依次安装有机械臂、电动伸缩筒和转动电机,可保证其灵活焊接,且本装置可进行焊渣清理,保证工作台面的清洁度,焊接材料放置时可被固定,可防偏移。可防偏移。可防偏移。
技术研发人员:邓力铭 邓钦文
受保护的技术使用者:南通慧宁机电科技有限公司
技术研发日:2021.08.04
技术公布日:2021/10/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。