1.本技术涉及晶体模组的领域,尤其是涉及一种晶体模组安装支架。
背景技术:
2.太阳电池组件是由高效晶体硅太阳能电池片、超白布纹钢化玻璃、eva、透明tpt背板以及铝合金边框组成。太阳电池组件又称之为晶体硅光伏组件,简称晶体模组。由于单片太阳电池输出电压较低,加之未封装的电池由于环境的影响电极容易脱落,因此必须将一定数量的单片电池采用串、并联的方式密封成太阳电池组件,以避免电池电极和互连线受到腐蚀,另外封装也避免了电池碎裂,方便了户外安装,晶体模组一般大量安装于开阔地带用于吸收太阳能。
3.相关技术中只是通过支架对晶体模组进行固定,晶体模组安装于支架后晶体模组的位置是固定不变的。
4.针对上述中的相关技术,发明人认为存在以下缺陷:由于不同时间太阳的照射角度不同,而晶体模组的位置是固定不变的,因此无法保证晶体模组保持最佳的向阳角度。
技术实现要素:
5.为了保证晶体模组保持最佳向阳角度,本技术提供一种晶体模组安装支架。
6.本技术提供的一种晶体模组安装支架采用如下的技术方案:
7.一种晶体模组安装支架,包括支撑架和转动设置于所述支撑架上的旋转架,所述支撑架上设置有用于驱动所述旋转架旋转的驱动件;所述旋转架上转动设置有翻转板,所述旋转架上还设置有用于驱动所述翻转板翻转的驱动组件;所述翻转板上开设有用于对晶体模组进行定位的定位槽,所述翻转板上还设置有用于固定晶体模组的固定组件。
8.通过采用上述技术方案,工作人员将晶体模组放置于翻转板上的定位槽内,通过固定组件将晶体模组固定于翻转板上,通过驱动件驱动旋转架在支撑架上旋转,同时通过驱动组件驱动翻转板在旋转架上翻转,从而能够调整翻转板的角度,进而调整晶体模组的角度,保证晶体模组保持最佳向阳角度。
9.可选的,所述旋转架包括旋转板、支撑板和第一旋转轴,所述第一旋转轴转动设置于所述支撑架上,所述驱动件用于驱动所述第一旋转轴旋转;所述旋转板上开设有旋转孔,所述第一旋转轴的顶端穿设于所述旋转孔,所述第一旋转轴与所述旋转板固定连接;所述第一旋转轴上固定设置有承载部,所述承载部的上表面抵接于所述旋转板的下表面;所述支撑板固定设置于所述旋转板上,所述翻转板的一侧于所述支撑板转动连接。
10.通过采用上述技术方案,驱动件在驱动第一旋转轴旋转的过程中,承载部对旋转板有向上的支撑作用,以使旋转板不会在第一旋转轴上向下滑动,旋转板对支撑板有稳定的支撑作用。
11.可选的,所述驱动组件包括支座和液压缸,所述支座固定设置于所述旋转板上,所述液压缸的底端与所述支座转动连接,所述液压缸的活塞杆与所述翻转板远离所述支撑板
的一侧转动连接。
12.通过采用上述技术方案,通过液压缸驱动活塞杆伸缩,从而驱动翻转板在支撑杆上翻转,进而实现对晶体模组角度的调节,相比于人工手动驱动翻转板翻转,具有省力作用。
13.可选的,所述固定组件包括安装块、夹持块和螺杆;所述安装块固定设置于所述翻转板上,所述安装块上开设有滑移槽,所述夹持块穿过所述滑移槽,所述夹持块与所述安装块滑移配合,所述螺杆与所述安装块螺纹配合,所述螺杆的端部抵接于所述夹持块上。
14.通过采用上述技术方案,工作人员将晶体模组放置于定位槽内后,通过旋转螺杆,解除螺杆对夹持块的固定作用,工作人员推动夹持块在滑移槽内朝向靠近定位槽的方向滑移,以使夹持块的下表面抵接于晶体模组的上表面;然后通过旋转螺杆,以使螺杆的底端抵接于夹持块的上表面,从而实现对夹持块的固定,夹持块和翻转板对晶体模组有夹持作用,从而将晶体模组固定于翻转板上。
15.可选的,所述翻转板上开设有避位槽,所述避位槽与所述定位槽相连通,所述避位槽的深度大于所述定位槽的深度。
16.通过采用上述技术方案,当工作人员需要取下晶体模组时,先解除固定组件对晶体模组的固定作用,然后将手伸入避位槽内,便于工作人员握持柱晶体模组,从而增加了工作人员将晶体模组从定位槽内取出的便捷性。
17.可选的,所述第一旋转轴上固定设置有导向杆,所述旋转板上开设有导向槽,所述导向杆穿设于所述导向槽。
18.通过采用上述技术方案,驱动件在驱动第一旋转轴旋转的过程中,第一旋转轴带动导向杆旋转,导向杆在导向槽内带动旋转板旋转,从而避免了旋转板与第一旋转轴发生相对旋转。
19.可选的,所述螺杆上固定设置有旋钮。
20.通过采用上述技术方案,工作人员通过旋转旋钮来旋转螺杆,相比于直接旋转螺杆,具有省力作用。
21.可选的,所述支撑板上固定设置有第一固定块,所述第一固定块上穿设有若干个螺栓,若干个螺栓均与所述旋转板螺纹配合。
22.通过采用上述技术方案,工作人员通过若干个螺栓将第一固定块固定于旋转板上,从而将支撑板固定于旋转板上,增加了工作人员安装和拆卸支撑板的便捷性。
23.可选的,所述夹持块上开设有握持槽。
24.通过采用上述技术方案,工作人员将手伸入握持槽内,然后通过推拉夹持块,以使夹持块在滑移槽内滑移,具有省力作用。
25.可选的,所述驱动件为电机,所述电机的输出轴与所述第一旋转轴的底端固定连接。
26.通过采用上述技术方案,通过电机驱动第一旋转轴旋转,相比于人工手动旋转第一旋转轴,具有省力作用。
27.综上所述,本技术包括以下至少一种有益技术效果:
28.1.工作人员将晶体模组放置于翻转板上的定位槽内,通过固定组件将晶体模组固定于翻转板上,通过驱动件驱动旋转架在支撑架上旋转,同时通过驱动组件驱动翻转板在
旋转架上翻转,从而能够调整翻转板的角度,进而调整晶体模组的角度,保证晶体模组保持最佳向阳角度;
29.2.驱动件在驱动第一旋转轴旋转的过程中,承载部对旋转板有向上的支撑作用,以使旋转板不会在第一旋转轴上向下滑动,旋转板对支撑板有稳定的支撑作用;
30.3.通过液压缸驱动活塞杆伸缩,从而驱动翻转板在支撑杆上翻转,进而实现对晶体模组角度的调节,相比于人工手动驱动翻转板翻转,具有省力作用。
附图说明
31.图1是本技术实施例的晶体模组安装支架的结构示意图。
32.图2是本技术实施例的晶体模组安装支架另一视角的结构示意图。
33.图3是图1中a部分的局部放大示意图。
34.图4是图1中b部分的局部放大示意图。
35.附图标记说明:1、支撑架;11、承载板;12、支撑脚;2、旋转架;21、旋转板;211、旋转孔;212、导向槽;22、支撑板;221、第一固定块;222、支撑部;23、第一旋转轴;231、承载部;232、导向杆;3、电机;4、翻转板;41、定位槽;42、避位槽;43、翻转杆;44、安装槽;441、固定杆;442、第三固定块;5、驱动组件;51、支座;511、第二固定块;512、定位块;52、液压缸;521、活塞杆;5211、第二旋转块;522、第一旋转块;5221、第二旋转轴;6、固定组件;61、安装块;611、滑移槽;62、夹持块;621、握持槽;63、螺杆;631、旋钮。
具体实施方式
36.以下结合附图1
‑
4对本技术作进一步详细说明。
37.本技术实施例公开一种晶体模组安装支架,参照图1和图2,晶体模组安装支架包括支撑架1和转动设置于支撑架1上的旋转架2,支撑架1上设置有用于驱动旋转架2旋转的驱动件。旋转架2上转动设置有翻转板4,旋转架2上还设置有用于驱动翻转板4翻转的驱动组件5。翻转板4上开设有用于对晶体模组进行定位的定位槽41,定位槽41与晶体模组的形状相适配,增加了晶体模组放置于翻转板4上的稳定性。翻转板4上还设置有两个用于固定晶体模组的固定组件6,两个固定组件6对称分布于定位槽41的两侧,进一步保证了晶体模组放置于翻转板4上的稳定性。
38.参照图1,支撑架1包括承载板11和四个支撑脚12,承载板11呈水平设置,承载板11的形状为长方体。四个支撑脚12的长度方向均为竖直方向,四个支撑脚12的顶端均与承载板11的下表面一体成型。四个支撑脚12呈矩形阵列分布,从而对承载板11有稳定的支撑作用。
39.参照图1和图2,旋转架2包括旋转板21、支撑板22和第一旋转轴23,第一旋转轴23的长度方向为竖直方向,第一旋转轴23的底端穿设于承载板11,第一旋转轴23与承载板11转动连接。在本实施例中,驱动件为电机3,电机3安装于承载板11的下表面,电机3用于驱动第一旋转轴23旋转。
40.继续参照图1和图2,旋转板21呈水平设置,旋转板21的形状为长方体,旋转板21的上表面开设有贯穿的旋转孔211,旋转孔211位于旋转板21的中心位置。第一旋转轴23的顶端穿设于旋转孔211,第一旋转轴23的顶端与旋转板21的上表面齐平,且第一旋转轴23与旋
转板21焊接。通过电机3驱动第一旋转轴23旋转,第一旋转轴23带动旋转板21旋转。
41.参照图2,为了增加旋转板21安装的稳定性,第一旋转轴23上一体成型有承载部231,承载部231的形状为圆柱体,承载部231的上表面抵接于旋转板21的上表面,承载部231对旋转板21有向上的支撑作用。
42.参照图1,为了限制旋转板21在旋转的过程中与第一旋转轴23发生相对旋转,第一旋转轴23的侧壁一体成型有导向杆232,导向杆232的形状为长方体。旋转板21上开设有导向槽212,导向杆232与导向槽212卡接配合,可以限制旋转板21与第一旋转轴23发生相对旋转。
43.继续参照图1,支撑板22呈竖直设置,支撑板22的底端与承载板11的上表面固定连接,支撑板22与承载板11组合形成l形。为了增加工作人员安装和拆卸支撑板22的便捷性,支撑板22的侧壁一体成型有第一固定块221,第一固定块221上穿设有若干个螺栓,若干个螺栓均与旋转板21螺纹配合,从而将第一固定块221固定于旋转板21上,进而将支撑板22固定于旋转板21上,增加了工作人员安装和拆卸支撑板22的便捷性。螺栓的数量可以为三个,也可以为五个,但凡所设置的螺栓的数量能将支撑板22牢固的安装于旋转板21上即可。
44.继续参照图1,支撑板22的顶端一体成型有两个支撑部222,两支撑部222的形状均为长方体。翻转板4两个相对的侧壁均一体成型有翻转杆43,两个翻转杆43分别穿设于两个支撑部222,两个翻转杆43分别与两个支撑部222转动连接,以使翻转板4在两个支撑部222之间翻转。
45.继续参照图1,翻转板4上表面还开设有两个避位槽42,两个避位槽42均与定位槽41相连通,且两个避位槽42的深度均大于定位槽41的深度。增加了工作人员拆卸晶体模组的便捷性。
46.参照图1和图3,驱动组件5包括支座51和液压缸52,支座51包括第二固定块511和两个定位块512,第二固定块511和两个定位块512的形状均为长方体。两个定位块512相互平行,两个定位块512的下表面均与第二固定块511的上表面一体成型。第二固定块511上穿设有两个螺栓,两个定位块512位于两个螺栓之间,两个螺栓均与旋转板21螺纹配合,从而将支座51固定于旋转板21的上表面。值得一提的是,第一旋转轴23位于支撑板22与驱动组件5之间,以使驱动组件5在驱动翻转板4翻转的过程中更加省力。
47.参照图3,液压缸52的底端一体成型有第一旋转块522,第一旋转块522上固定设置有第二旋转轴5221,固定方式可以为焊接,也可以为一体成型。第二旋转轴5221的两端分别穿设于两个定位块512,第二旋转轴5221的两端分别与两个定位块512转动连接。同时第一旋转块522的两个侧壁分别抵接于两个定位块512的内侧壁,从而增加了液压缸52绕支座51旋转的稳定性。
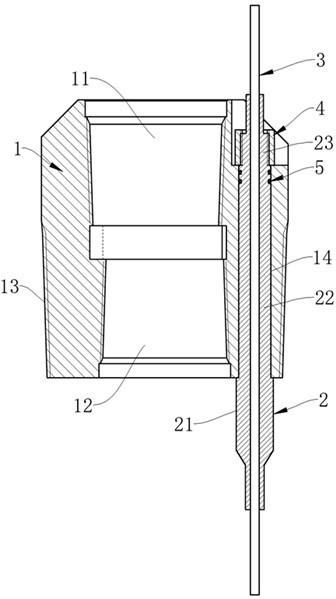
48.参照图1和图4,翻转板4远离支撑板22的一侧开设有安装槽44,安装槽44内设置有固定杆441。液压缸52的活塞杆521的端部一体成型有第二旋转块5211,固定杆441穿过第二旋转块5211,第二旋转块5211与固定杆441转动连接。通过液压缸52驱动活塞杆521伸缩,活塞杆521驱动翻转板4翻转,从而改变晶体模组的角度。
49.参照图4,为了增加工作人员安装和拆卸固定杆441的便捷性,固定杆441的两端均固定设置有第三固定块442,固定方式可以为螺栓连接,也可以为焊接。两个第三固定块442背离固定杆441的侧壁分别抵接于安装槽44两个相对的侧壁。每个第三固定块442上均穿设
有四个螺栓,每个螺栓均与翻转板4螺纹配合,从而将固定杆441固定于安装槽44内,从而增加了工作人员安装和拆卸固定杆441的便捷性。
50.继续参照图4,固定组件6包括安装块61、夹持块62和螺杆63,安装块61和夹持块62的形状均为长方体,安装块61固定于翻转板4开设有定位槽41的侧壁,安装块61的固定方式可以为焊接,也可以为一体成型。安装块61的侧壁开设有滑移槽611,滑移槽611的下表面与翻转板4的上表面齐平,从而保证夹持块62的下表面抵接于晶体模组的上表面,实现对晶体模组的固定。
51.继续参照图4,夹持块62穿过滑移槽611,夹持块62与安装块61滑移配合。螺杆63与安装块61螺纹配合,螺杆63的底端抵接于夹持块62的上表面。螺杆63和翻转板4对夹持块62有夹持作用,夹持块62和翻转板4对晶体模组有夹持作用。为了增加工作人员旋转螺杆63的便捷性,螺杆63远离夹持块62的一端固定设置有旋钮631,旋钮631可以为蝶形螺母。
52.继续参照图4,夹持块62上开设有贯穿的握持槽621,工作人员将手放置于握持槽621内,以使工作人员在手动推拉夹持块62的过程中具有省力作用。
53.本技术实施例一种晶体模组安装支架的实施原理为:工作人员将晶体模组放置于翻转板4上表面的定位槽41内,通过两个固定组件6实现对晶体模组的固定;通过驱动件驱动旋转架2旋转,旋转架2带动翻转板4旋转,翻转板4带动晶体模组旋转;通过驱动组件5驱动翻转板4在旋转架2上翻转,从而调节翻转板4的角度,进而调节晶体模组的角度,以使晶体模组保持最佳向阳角度。
54.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。