1.本实用新型涉及电机控制技术领域,具体是一种用于驱动交流电机智能调速的集成芯片电路。
背景技术:
2.变频驱动装置中,以频率调变为主要设计构思,此控制理论皆由交流转直流电,再由直流转为可改变频率的交流电并以此控制负载电机,导致习知变频驱动装置的电路面积较大且所需制造成本较高。因此,变频驱动装置仍有改进的空间。
3.例如专利号为cn202231665u的交流电机调速电路,其包括了交流电机、可控硅、取样电阻、过载保护模块、电机转速调整模块、控制芯片和直流电源,整个技术方案是利用控制芯片来调节可控硅的导通角,进而实现对交流电机的控制,这种方式很容易产生正负半波切换时断点突波问题。
4.还例如专利号为cn208890692u的交流电机调速电路,其利用双向可控硅以及单刀双掷开关进行电路的切换,实现点击的调节,这种方式虽然较为简单,但是存在较为严重的换相突波及噪音问题。
5.基于上述原因,需要提供一种能够解决正负半波切换时断点突波问题以及换相突波及噪音问题的交流电机调速电路。
技术实现要素:
6.本实用新型的目的在于提供一种用于驱动交流电机智能调速的集成芯片电路,以解决上述背景技术中提出的问题。
7.为实现上述目的,本实用新型提供如下技术方案:
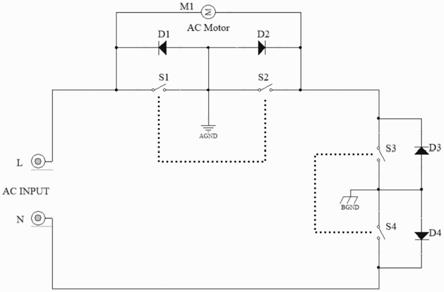
8.一种用于驱动交流电机智能调速的集成芯片电路,由二极管d1、二极管d2、mos管q1、mos管q2、电机m1、二极管d3、二极管d4和mos管q4组成,所述二极管d1的阴极连接电机m1、mos管q1的漏极和交流电l,二极管d1的阳极连接二极管d2的阳极、mos管q1的源极、mos管q2的源极和接地端agnd,mos管q1的栅极连接mos管q2的栅极和控制器driver1,二极管d2的阴极连接电机m1的另一端、mos管q2的漏极、mos管q3的漏极和二极管d4的阴极,mos管q3的源极连接二极管d3的阳极、二极管d4的阳极、mos管q4的源极和接地端bgnd,mos管q3的栅极连接mos管q3的栅极和控制器driver2,二极管d4的阴极连接mos管q4的另一端和交流电n。
9.作为本实用新型的进一步技术方案:所述mos管q1和mos管q2联动。
10.作为本实用新型的进一步技术方案:所述mos管q3和mos管q4联动。
11.作为本实用新型的进一步技术方案:所述mos管q1、mos管q2均为p
‑
mos管。
12.作为本实用新型的进一步技术方案:所述mos管q3、mos管q4均为p
‑
mos管。
13.作为本实用新型的进一步技术方案:所述控制器driver1为pwm控制器。
14.作为本实用新型的进一步技术方案:所述控制器driver2为pwm控制器。
15.与现有技术相比,本实用新型的有益效果是:本实用新型电路交流正负半波周期为连续调制电路架构,没有正负半波切换时断点突波问题,不需要像h桥电路架构零点侦测和换相调制,有效解决换相突波及噪音问题。电机内线圈电感反电动势效应也透过q1,q2,瞬间短路电路吸收机制,改善mosfet管q3,q4发热问题。
附图说明
16.图1是现有技术的电路图;
17.图2是本实用新型的电路图;
18.图3是动作原理图。
19.图4是交流弦波载入pwm波形图。
20.图5是交流弦波载入pwm后,m1电机端实际波形图。
21.图6是本实用新型的电原理示意图。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.请参阅图2
‑
6,实施例1:一种用于驱动交流电机智能调速的集成芯片电路,由二极管d1、二极管d2、mos管q1、mos管q2、电机m1、二极管d3、二极管d4和mos管q4组成,所述二极管d1的阴极连接电机m1、mos管q1的漏极和交流电l,二极管d1的阳极连接二极管d2的阳极、mos管q1的源极、mos管q2的源极和接地端agnd,mos管q1的栅极连接mos管q2的栅极和控制器driver1,二极管d2的阴极连接电机m1的另一端、mos管q2的漏极、mos管q3的漏极和二极管d4的阴极,mos管q3的源极连接二极管d3的阳极、二极管d4的阳极、mos管q4的源极和接地端bgnd,mos管q3的栅极连接mos管q3的栅极和控制器driver2,二极管d4的阴极连接mos管q4的另一端和交流电n。
24.mos管q1和mos管q2联动。mos管q3和mos管q4联动。mos管q1、mos管q2均为p
‑
mos管。mos管q3、mos管q4均为p
‑
mos管。控制器driver1为pwm控制器。控制器driver2为pwm控制器。
25.四个mosfet管(q1,q2,q3,q4),图中d1,d2,d3,d4为mosfet内部续流二极管,两组驱动电路,和两组驱动用的独立电源。
26.以交流正负半波周期来看,当交流电压输入时(q1,q2 off);(q3,q4 on;正半周自动由q3导通,负半周由q4导通),此时输入的交流电压与m1,q3,q4形成封闭回路,电机端输出波形即为输入的交流电压波形,电机全速运转。
27.以交流正负半波周期来看,当(q3,q4 off),(q1,q2 on;正半周自动由q1导通,负半周由q2导通),此时输入的交流电压回路被断开,电机停止运转。而q1,q2与m1形成封闭回路,电机内线圈电感反电动势效应突波电压将瞬间短路并且由agnd吸收。
28.当在交流电压输入状态下,交错加快上述开关动作,即利用脉波宽度调变(pwm)控制信号加载交流电压波形内,形成交流电压波形包络,此时调整pwm占空比即可进行交流电机调速。实际动作顺序流程为在交流正半周时q1(off)q3(on)q1(on)q3(off),在交流负半
周时q2(off)q4(on)q2(on)q4(off);周而复始,依序循环。q1,q3及q2,q4为互补波形,不可同时导通。
29.实施例2,在实施例1的基础上,如图6所示,控制器driver1和控制器driver2由电源单元供电,通过i/0单元接收信号,然后经过运算单元进行处理,最终利用脉波调变单元组成控制信号发给控制器driver1和控制器driver2,用于控制各个mos管的动作。
30.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
31.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。