1.本发明涉及物料传送领域,具体是一种步进式阶梯工位物料搬运装置。
背景技术:
2.在工厂的生产车间,各设备之间都有一定的间隔距离,并且工件在每一工序的处理需要间隔停歇,所以工件在设备间的运送就需要适应生产节拍,实现间歇运送;于此同时,在运送的过程中,为保证下一序的定位准确,就必须保证工件在运输过程中摆放位置及姿势不发生变化,工件水平运输实现起来相对容易实现,在同时具有水平和竖直方向的运送时,由于重力作用就容易使工件的姿势发生,给造成下一工序的定位带来麻烦。为解决上述工件输送中符合生产节拍并保证工件位置姿势的问题。本发明提供了一种步进式阶梯工位物料搬运装置的技术方案。
技术实现要素:
3.本发明的目的在于提供一种步进式阶梯工位物料搬运装置,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:
5.一种步进式阶梯工位物料搬运装置,包括固定在机架上的固定工位,水平移动装置,竖直移动装置和主动工位,所述的水平移动装置与机架活动联接,所述的竖直移动装置设置在水平移动装置上,竖直移动装置上设置有台架,所述的主动工位设置在台架上,所述的固定工位的数目较主动工位数多一个。
6.进一步地,所述的固定工位在水平方向的两相邻工位间隔距离与主动工位在相同方向上的两相邻工位间隔距离相等。
7.进一步地,所述的固定工位在竖直方向的两相邻工位落差与主动工位在相同方向上的两相邻工位落差相等。
8.进一步地,所述的水平移动装置与机架间通过导轨联接,水平移动装置的驱动装置为丝杠驱动。
9.进一步地,所述的竖直移动装置的运动为气缸驱动。
10.本发明的积极效果是:
11.1.通过控制步进式阶梯工位物料搬运装置运行速度,可以实现工件在水平运送的过程中同时进行举升或下降运送工件,实现间歇运送,适应生产节拍。
12.2.通过步进式阶梯工位物料搬运装置,可以实现工件在同时含有水平运送和竖直运送的输送环境下,保证工件的姿势不变,减少了下一工序的定位工作量,提高了劳动效率。
附图说明
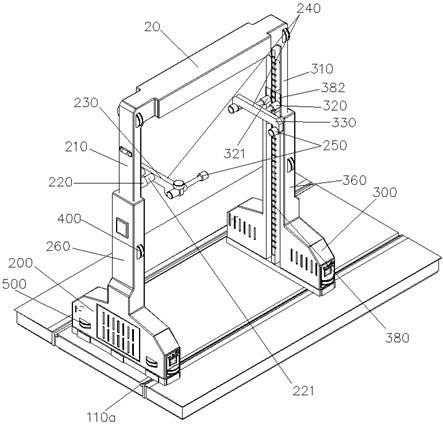
13.图1为本发明实施例的结构示意图。
14.图中:1
‑
第六工位,2
‑
第五工位,3
‑
第四工位,4
‑
第三工位,5
‑
第二工位,6
‑
第一工位,21
‑
第一主动工位,22
‑
第二主动工位,23
‑
第三主动工位,24
‑
第四主动工位,25
‑
第五主动工位,31
‑
水平移动装置,32
‑
机架,33
‑
竖直移动装置,34
‑
台架,101
‑
工件。
具体实施方式
15.为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,六工位步进式阶梯工位物料搬运装置,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
16.实施例:一种六工位步进式阶梯工位物料搬运装置,包括固定在机架32上的固定工位,水平移动装置31,竖直移动装置33和主动工位,所述的水平移动装置31与机架32活动联接,所述的竖直移动装置33设置在水平移动装置31上,竖直移动装置33上设置有台架34,所述的主动工位设置在台架34上。
17.所述的固定工位都固定在机架32上,六工位步进式阶梯工作物料搬运装置则设置六个固定工位,分别是第六工位1,第五工位2,第四工位3,第三工位4,第二工位5,第一工位6,其中每相邻两工位间x向距离相等,y向落差也相等。
18.所述的主动工位都固定在台架34上,六工位步进式阶梯工作物料搬运装置则设置五个主动工位,第一主动工位21,第二主动工位22,第三主动工位23,第四主动工位24,第五主动工位25,每相邻两主动工位间x向距离相等,且与固定工位相邻两工位x向间距相等;每相邻两主动工位间y向落差也相等,且与固定工位相邻两工位y向落差相等。
19.综合上述并结合附图,所述的固定工位的数目较主动工位数多一个。
20.所述的水平移动装置与机架间的活动连接为导轨联接,水平移动装置的驱动装置为丝杠驱动。
21.所述的竖直移动装置的运动为气缸驱动。
22.实施例工作原理说明:
23.本实施例不但可以实现逐级举升过程,也可以实现逐级下降过程。现就举升过程和下降过程分别说明。
24.1.举升过程:如果是第一次工作,除第一工位6上有工件外,其余工位都处于闲置状态,此时工件放置在第一工位6上,接着竖直移动装置33在气缸上升驱动作用下带动第一主动工位21沿图示y方向上升,将第一工位6上工件举起至高于第二工位5的高度;然后水平移动装置31沿图示x负方向移动,移动至第二工位5;接着竖直移动装置33带动第一主动工位21下降,将第一主动工位21举升的工件放置在第二工位5上;而后水平移动装置31沿图示x正方向移动,带动第一主动工位21回到初始位置。这一个循环动作完成工件从第一工位6到第二工位5的移动,同样道理,工件可以从第二工位移动至第三工位,从第三工位移动至第四工位,直至移动到第六工位,只是在移动过程中,主动工位也依次轮换。
25.2.下降过程:下降过程是举升过程的逆过程,是从初始的第六工位1将工件101移动至第一工位的过程。
26.如果是第一次工作,除第六工位1上有工件101外,其余工位都处于闲置状态,此时第五主动工位25调至第六工位1的正下方,工件101放置在第六工位1上,接着竖直移动装置33在气缸上升驱动作用下带动第五主动工位25沿图示y方向上升,将第一工位6上工件举起
至高于第二工位5的高度;然后水平移动装置31沿图示x正方向移动,移动至第五工位2;接着竖直移动装置33带动第五主动工位25下降,将第五主动工位25下降的工件放置在第五工位2上;而后水平移动装置31沿图示x负方向移动,带动第五主动工位25回到初始位置。这一个循环动作完成工件从第六工位1到第五工位2的移动,同样道理,工件可以从第五工位移动至第四工位,从第四工位移动至第三工位,直至移动到第一工位,只是在移动过程中,主动工位也依次轮换。
27.以上所述仅为本发明的一个实施例而已,本发明机架上设置的固定工位的数目和台架上主动工位数目需结合实际情况设置,并不用以限制本发明,水平或上升驱动装置也可以链传动,齿轮齿条传动等并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种步进式阶梯工位物料搬运装置,包括固定在机架上的固定工位,水平移动装置,竖直移动装置和主动工位,所述的水平移动装置与机架活动联接,所述的竖直移动装置设置在水平移动装置上,竖直移动装置上设置有台架,所述的主动工位设置在台架上,其特征在于,所述的固定工位的数目较主动工位数多一个。2.根据权利要求1所述的一种步进式阶梯工位物料搬运装置,其特征在于,所述的固定工位在水平方向的两相邻工位间隔距离与主动工位在相同方向上的两相邻工位间隔距离相等。3.根据权利要求1所述的一种步进式阶梯工位物料搬运装置,其特征在于,所述的固定工位在竖直方向的两相邻工位落差与主动工位在相同方向上的两相邻工位落差相等。4.根据权利要求1所述的一种步进式阶梯工位物料搬运装置,其特征在于,所述的水平移动装置与机架间通过导轨联接,水平移动装置的驱动装置为丝杠驱动。5.根据权利要求1所述的一种步进式阶梯工位物料搬运装置,其特征在于,所述的竖直移动装置的运动为气缸驱动。
技术总结
一种步进式阶梯工位物料搬运装置,包括固定在机架上的固定工位,水平移动装置,竖直移动装置和主动工位,水平移动装置与机架活动联接,竖直移动装置设置在水平移动装置上,竖直移动装置上设置有台架,主动工位设置在台架上,固定工位的数目较主动工位数多一个,固定工位在水平方向的两相邻工位间隔距离与主动工位在相同方向上的两相邻工位间隔距离相等,固定工位在竖直方向的两相邻工位落差与主动工位在相同方向上的两相邻工位落差相等;本发明的积极效果是:可以实现工件在水平运送的过程中同时进行举升或下降运送工件;可以实现工件在同时含有水平运送和竖直运送的输送环境下,保证工件的姿势不变,避免下一工位重新定位,提高了劳动效率。提高了劳动效率。提高了劳动效率。
技术研发人员:李清州 周月花
受保护的技术使用者:李清州
技术研发日:2021.02.24
技术公布日:2021/10/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。