1.本实用新型涉及轨道列车的大型构件码垛技术领域,尤其是指一种码垛装置。
背景技术:
2.在轨道列车的检修过程中,构架或轮对等大型构件需要从轨道列车上拆卸下来,再将其送入检修点完成检修工作,由于构架或轮对大致呈对称结构,体积、重量大,数量多,其缓存、存储通常配有专门的立体存放库,目前在整个检修流程中,构架或轮对都是靠人力推动或重型牵引车来移动;而立体车库通常具有多层,这就导致构架或轮对进入立体车库后又必须转移到专门的叉车等辅助升降设备来才能进行高层定位、升降、码垛等操作,这就显得构架或轮对的定位、转移、升降、码垛极其繁琐,尤其是轮对由于其具有成对的转轮,使得其在转移过程中还极易发生滑落事故;而常见的码垛机器人或码垛装置又不适用于构架或轮对的定位、转移、升降、码垛,主要原因有:一、常见的码垛机器人或码垛装置主要分为推动式和机械臂式两种,显然构架或轮对的形状结构限制,不能用该两种方式进行定位、转移、升降、码垛;二、常见的码垛机器人或码垛装置往往可升降空间小,而构架或轮对存储高度往往较高,简单的增加升降机构长度虽然能在一定程度上解决码垛机器人或码垛装置可码垛高度,但这又容易造成码垛机器人或码垛装置重心升高,稳定性降低;三、轮对由于其具有成对的转轮,使用常规的码垛机器人或码垛装置转移过程中极易发生轮对滑落事故;四、轨道检修车间的轨道通常与地面间有70~80mm的间隙,常规码垛机器人或码垛装置的行走轮极易卡在该间隙内。
技术实现要素:
3.本实用新型目的是提供一种码垛装置,该码垛装置能对构架或轮对进行转移、升降、码垛,安全系数高,并且在轨道检修车间行进平稳。
4.为实现上述目的,本实用新型采取以下技术方案:
5.一种码垛装置,包括相对设置的第一底座和第二底座,在所述第一底座上设有可升降的第一升降支柱,在所述第一升降支柱上设有可沿第一升降支柱升降的第一伸缩机构,第一伸缩机构和第一夹具相连;在所述第二底座上设有可升降的第二升降支柱,在所述第二升降支柱上设有可沿第二升降支柱升降的第二伸缩机构,第二伸缩机构和第二夹具相连,并且第一升降支柱和第二升降支柱通过横梁连接;在所述第一底座和第二底座上设有行走机构,所述行走机构用于驱动第一底座和第二底座。
6.优选的,所述行走机构包括至少四组可转动的行走轮,在第一底座和第二底座底部分别设有至少两组行走轮,每组行走轮中至少有两个行走轮,并且每组行走轮错位设置。
7.优选的,所述第一夹具和第二夹具均设有托架,在所述托架上各设有至少一组托轮。
8.优选的,在所述第一底座上设有第一导轨,第二底座上设有第二导轨,所述第一升降支柱通过第一液压缸系统沿第一导轨升降,第二升降支柱通过第二液压缸系统沿第二导
轨升降。
9.优选的,在所述第一升降支柱和第二升降支柱上分别设有第一丝杠螺母机构和第二丝杠螺母机构,所述第一伸缩机构通过第一丝杠螺母机构沿第一升降支柱升降;第二伸缩机构通过第二丝杠螺母机构沿第二升降支柱升降,并且第一丝杠螺母机构和第一驱动装置相连,第二丝杠螺母机构和第二驱动装置相连。
10.优选的,所述第一伸缩机构和第二伸缩机构均包括液压缸,所述第一夹具和第二夹具分别通过第一伸缩机构的液压缸和第二伸缩机构的液压缸实现两夹具的靠近和远离。
11.优选的,还包括控制系统和视觉检测系统,所述视觉检测系统和控制系统相连,所述控制系统还和行走机构、第一液压缸系统、第二液压缸系统、第一驱动装置、第二驱动装置、第一夹具的液压缸、第二夹具的液压缸连接。
12.进一步优选的,还包括防撞部件,所述防撞部件和控制系统相连。
13.上述技术方案中,第一升降支柱通过第一液压缸系统沿第一导轨升降,第二升降支柱通过第二液压缸系统沿第二导轨同步升降;第一伸缩机构通过第一丝杠螺母机构沿第一升降支柱升降,进而带动第一夹具升降;第二伸缩机构通过第二丝杠螺母机构沿第二升降支柱升降,进而带动第二夹具同步升降,使得第一夹具和第二夹具可升降空间大大增加,另外,两丝杠螺母机构和两升降支柱相互配合使得第一夹具和第二夹具可适应不同高度的构架或轮对夹取、转移,进而实现该装置的重心能保持在合理位置,安全可靠性大大提高;第一夹具和第二夹具分别通过第一伸缩机构和第二伸缩机构实现靠近和远离,进而利用托架、托轮配合,实现转移、升降、码垛轮对时,第一夹具和第二夹具上的托轮可以稳稳的托住轮对上成对的转轮,避免转轮旋转,导致轮对滑落;第一底座和第二底座底部通过分别设置至少两组行走轮,并且每组行走轮错位设置,保证了该装置在跨越轨道与地面的间隙时,每组行走轮中至少有一个行走轮与地面接触,从而有效的避免了行走轮卡在该间隙内,同时保证了该装置平顺的从该间隙跨越,达到在轨道检修车间平稳行进。
附图说明
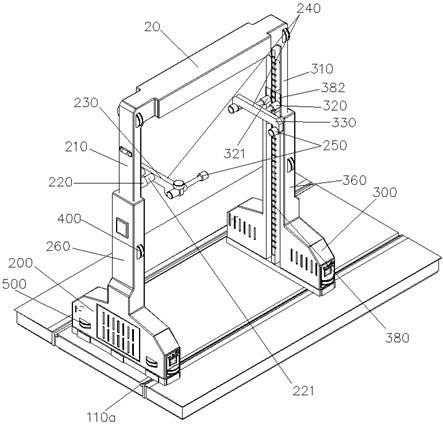
14.图1为本码垛装置立体图(第一伸缩机构和第一夹具位于第一丝杠螺母机构的较高位)示意图;
15.图2为本码垛装置左视图局部剖视图(第一伸缩机构和第一夹具位于第一丝杠螺母机构的较低位)示意图;
16.图3为本码垛装置左视图(第一伸缩机构和第一夹具位于第一丝杠螺母机构的较高位)示意图。
具体实施方式
17.下面结合附图,对本实用新型做进一步说明:
18.如图1、图2、图3所示,本码垛装置,包括相对设置的第一底座200和第二底座300,其中在第一底座200上设有可升降的第一升降支柱210,在第一升降支柱210上设有可沿第一升降支柱210升降的第一伸缩机构220,第一伸缩机构220和第一夹具230相连,通过第一伸缩机构220实现第一夹具230的往复伸缩运动,这样第一夹具230在沿第一升降支柱210升降的同时,还在第一升降支柱210的带动下进一步升降,使得第一夹具230可升降空间大大
增加,适应不同高度的轮对夹取;同样的,在第二底座300上设有可升降的第二升降支柱310,在第二升降支柱310上设有可沿第二升降支柱310升降的第二伸缩机构320,第二伸缩机构320和第二夹具330相连,通过第二伸缩机构320实现第二夹具330的往复伸缩运动;这样,第二夹具330在沿第二升降支柱310升降的同时,还在第二升降支柱310的带动下进一步升降,使得第二夹具330可升降空间大大增加,适应不同高度的轮对夹取;第一伸缩机构220和第二伸缩机构320配合同步伸缩,实现两夹具的靠近和远离;第一升降支柱210和第二升降支柱320上端通过横梁20连接并同步升降,第一夹具230和第二夹具330同步升降、靠近或远离,进而实现轮对的升降、码垛;在第一底座200和第二底座300上均设有行走机构100,行走机构100通常位于第一底座200和第二底座300底部,用于驱动第一底座200和第二底座300,进而带动本装置移动。在本实施例中,行走机构100包括至少四组可转动的行走轮110,其中在第一底座200和第二底座300底部分别设有至少两组行走轮110,每组行走轮110有两个行走轮,并且两个行走轮错位设置,这样该装置在跨越轨道与地面的间隙110a时,每组行走轮110中至少有一个行走轮与地面接触,从而有效的避免了行走轮卡在该间隙110a内,同时保证了该装置能平顺的从该间隙110a跨越,达到在轨道检修车间平稳行进。
19.在一个优选实施例中,第一夹具230和第二夹具330均设有托架240,并且在每个托架240上各设有至少一组托轮250,成对设置的托架240可以平稳的将构架等大型构件托住,而托轮250可以稳稳的托住轮对上成对的转轮,避免转轮旋转,导致轮对滑落,使得该装置的安全系数大大提高。
20.在一个优选实施例中,在第一底座200上设有第一导轨260,第二底座300上设有第二导轨360,第一升降支柱210通过第一液压缸系统270(也可以是气缸系统)沿第一导轨260升降,第二升降支柱310通过第二液压缸系统沿第二导轨360升降。在第一升降支柱210和第二升降支柱310上分别设有第一丝杠螺母机构280和第二丝杠螺母机构380,第一丝杠螺母机构280和第一驱动装置281的第一驱动电机相连,第二丝杠螺母机构380和第二驱动装置的第二驱动电机相连;这样,第一伸缩机构220通过第一丝杠螺母机构280的螺母282沿第一升降支柱210升降,进而带动第一夹具230升降;第二伸缩机构320通过第二丝杠螺母机构380的螺母382沿第二升降支柱310升降,进而带动第二夹具330升降;两丝杠螺母机构和两升降支柱相互配合使得第一夹具230和第二夹具330可适应不同高度的轮对夹取、转移,并且两升降支柱带动横梁20升降,还使得该装置的重心能保持在合理位置,安全可靠性大大提高。更进一步的,第一伸缩机构220和第二伸缩机构230均包括液压缸(也可以是气缸),这样,第一夹具230和第二夹具330分别通过第一伸缩机构220的液压缸221和第二伸缩机构320的液压缸321实现两夹具的靠近和远离,进而实现实现轮对或构件的升降、码垛和与轮对或构件分离。
21.在另一个优选实施例中,本装置还包括控制系统和视觉检测系统400,其中视觉检测系统400和控制系统相连,并且控制系统还和行走机构100、第一液压缸系统270、第二液压缸系统、第一驱动装置281、第二驱动装置、第一夹具230的液压缸、第二夹具330的液压缸连接。视觉检测系统400是现有技术,其包括多个不同方位的摄像头和至少一个中控器,利用摄像头拍摄图像,并将拍摄图像传递给中控器,中控器将信号传递给控制系统,控制系统再通过行走机构100、第一液压缸系统270、第二液压缸系统、第一驱动装置281、第二驱动装置381、第一夹具230的液压缸、第二夹具330的液压缸,达到控制两夹具的对准及本装置的
路径、位姿修正;这样,本装置就可以实现以现有的轨道作为识别对象,计算出该装置行走的距离以及当前的位姿,结合现场轨道的位置实现定位,进一步地确定被运轮对的定位位置,对被运轮对的体量进行路径修正,保证横梁20顺利横跨被运轮对,第一夹具230和第二夹具330可以精准的夹在被运轮对的两侧,进而实现对构架或轮对的自动定位、转移、升降、码垛。在本实施例中,本装置还包括防撞部件500,并且防撞部件500和控制系统相连,避免本装置和人或其他物体发生误碰。
22.上述技术方案中,本码垛装置的控制系统接收到指令后,行走机构100即驱动行走轮110使该装置沿预设路径行驶到被运轮对的位置,视觉检测系统400对被运轮对的体量进行路径修正,保证横梁20顺利横跨被运轮对;待横梁20整体横跨、覆盖被运轮对后,第一升降支柱210通过第一液压缸系统270沿第一导轨260升降,第二升降支柱310通过第二液压缸系统沿第二导轨360同步升降,进而带动第一升降支柱210的第一丝杠螺母机构280和第二升降支柱310的第二丝杠螺母机构380同步升降,进而通过第一伸缩机构220和第二伸缩机构320带动第一夹具230和第二夹具330同步升降;第一伸缩机构220通过第一丝杠螺母机构280的螺母282沿第一升降支柱210升降,进而带动第一夹具230升降;第二伸缩机构320通过第二丝杠螺母机构380的螺母382沿第二升降支柱310升降,进而带动第二夹具330同步升降,直至第一夹具230和第二夹具330移动至合适高度,第一夹具230和第二夹具330再分别通过第一伸缩机构220和第二伸缩机构230的液压缸同时靠近至被运轮对的合适位置;第一驱动装置281的第一驱动电机和第二驱动装置381的第二驱动电机再分别驱动第一丝杠螺母机构280和第二丝杠螺母机构380,进而使得第一夹具230和第二夹具330上升,托架240平稳的将构架等大型构件托住,或者托轮250稳稳的托住轮对上成对的转轮,避免转轮旋转,导致轮对滑落;在此过程中,摄像头将拍摄图像传递给中控器,中控器将信号传递给控制系统,控制系统再通过行走机构100、第一液压缸系统270、第二液压缸系统、第一驱动装置281、第二驱动装置381、第一夹具230的液压缸、第二夹具330的液压缸达到控制两夹具的对准及本装置的路径、位姿修正,待被运构件或轮对运送至目标区域后,第一夹具230和第二夹具330远离,该装置与被运构件或轮对分离,并返回待机位置。当该装置跨越轨道与地面的间隙110a时,每组行走轮110中至少有一个行走轮与地面接触,从而有效的避免了行走轮卡在该间隙110a内,同时保证了该装置平顺的从该间隙110a跨越,达到在轨道检修车间平稳行进的目的。
23.本实施例只是对本实用新型构思和实现的说明,并非对其进行限制,在本实用新型构思下,未经实质变换的技术方案仍然在保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。