1.本发明属于无人机充电技术领域,尤其涉及一种无人机自动换电基站。
背景技术:
2.无人机即无人驾驶飞行器是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,涉及传感器技术、通信技术、信息处理技术、智能控制技术以及航空动力推进技术等,是信息时代高技术含量的产物。无人机价值在于形成空中平台,结合其他部件扩展应用,替代人类完成空中作业。随着无人机研发技术逐渐成熟,制造成本大幅降低,无人机在各个领域得到了广泛应用,且其适用领域还在迅速拓展。为了证无人机的长时续航能力,需要对无人机进行充电,而目前的充电方式大多采用人工进行充电,并且由于充电位置和无人机的位置无法精准确定,还有的采用是部分自动化加人工进行充电,还没有能实现无人机从启停到充电的一体化完成过程的换电基站。
技术实现要素:
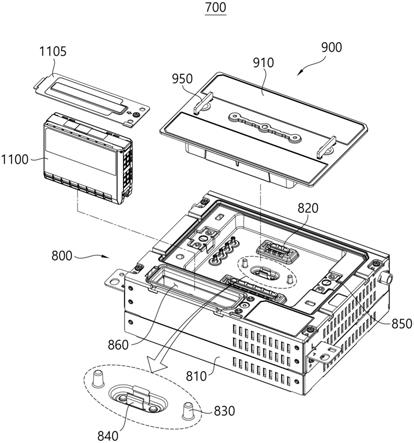
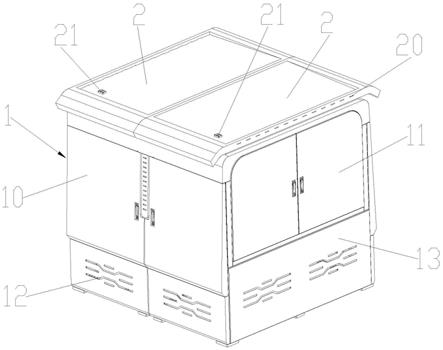
3.本发明目的是为了克服现有技术的不足而提供一种适用性广,能自动实现无人机电池的更换,全程自动化完成,并可实现多块电池缓存充电功能的无人机自动换电基站。为达到上述目的,本发明采用的技术方案是:一种无人机自动换电基站,包括:箱体,所述箱体内具有容纳空间,所述箱体的上端设有可自动开合的两个上开合门;升降平台,所述升降平台可上下升降的设于所述容纳空间内,在所述升降平台上设有避让门以及位于避让门四周的用于夹紧无人机的夹紧模组;飞机定位模组,所述飞机定位模组设于所述容纳空间内,且位于所述避让门的下方;至少一个充电盒料仓,所述充电盒料仓内具有充电组件,至少一个所述充电组件内设有电池,所述充电盒料仓设置在所述容纳空间内;电池取放模块,所述电池取放模块设于所述容纳空间内,用于夹取或者放置电池;其中,当两个所述上开合门自动开启后,无人机进入到所述升降平台内,所述升降平台往下移动直到飞机定位模组穿过所述避让门后将所述无人机定位,所述电池取放模块将无人机上的电池取出后送至充电盒料仓中,再将充电盒料仓中充满电的电池送至无人机处,最后无人机飞出所述箱体,两个所述上开合门自动关闭。
4.进一步的,两个所述上开合门呈斜面状,且所述低位一端的上开合门上开有用于排水的排水口。
5.进一步的,所述升降平台包括:停机平台,所述停机平台用于停放无人机;连接架,两个所述连接架设于所述停机平台的两侧;
丝杆,所述连接架通过动力机构可上下移动的设于丝杆的滑动块上;其中,所述动力机构包括动力电机,所述动力电机的转轴上设有主动滚轮,所述主动滚轮的两侧设有相对设置的从动滚轮,所述从动滚轮的一侧设有丝杆滚轮,所述主动滚轮、从动滚轮和丝杆滚轮之间通过同步带相连;所述丝杆设于所述丝杆滚轮上。
6.进一步的,所述避让门由两个可转动的转动门构成,两个所述转动门设置在升降平台中心的开口处。
7.进一步的,所述夹紧模组包括设置在停机平台上的横移组件和竖移组件;其中,所述横移组件包括通过横移驱动机构可相对滑动的两个横移条,竖移组件包括通过竖移驱动机构可相对滑动的两个竖移条;所述横移驱动机构与竖移驱动机构的结构相同,所述横移驱动机构包括由横移电机驱动在两个横移滚轮之间的横移同步带传动,所述横移同步带上设有同向/反向运动的两个转接块;所述转接块与横移条或竖移条相连。
8.进一步的,所述飞机定位模组包括定位支架,所述定位支架上设有第一伺服电机,所述第一伺服电机驱动与第一丝杆相连的第一滑轨横向移动,所述第一滑轨与前夹紧块相连;所述前夹紧块的一侧设有相对设置的第一夹紧块和第二夹紧块,所述第一夹紧块和所述第二夹紧块设置在对应的第二滑轨上,两个所述第二滑轨分别与第二丝杆相连,两个所述第二滑轨经由第二伺服电机驱动在第二丝杆上相互靠近或分离。
9.进一步的,所述充电盒料仓包括料仓支架,所述料仓支架上设有竖向设置的多个充电盒,至少一个所述充电盒内设有电池。
10.进一步的,所述充电盒为太阳能供电或高压电磁感应供电。
11.进一步的,所述电池取放模块包括:旋转平台,所述旋转平台经由平台伺服电机驱动进行旋转;竖向支架,所述竖向支架设于所述旋转平台上;横移支架,所述横移支架可上下移动的设置在竖向支架上;第一伸出组件,所述第一伸出组件设于所述横移支架上,所述第一伸出组件包括经由第一伸出电机驱动的第一伸出丝杆,所述第一伸出丝杆带动第一伸出滑轨滑动;第二横移支架;所述第二横移支架可横向移动的设于所述第一伸出组件上;第二伸出组件,所述第二伸出组件设于所述第二横移支架上, 所述第二伸出组件包括经由第二伸出电机驱动的第二伸出丝杆,所述第二伸出丝杆带动第二伸出滑轨滑动;夹紧组件,所述夹紧组件设于所述第二伸出组件上,所述夹紧组件包括经由夹紧电机和夹紧滑轨驱动的两个夹爪;解锁组件,所述解锁组件设于所述夹紧组件的上方,且设置在第二横移支架上,所述解锁组件用于将无人机和充电盒料仓处的电池抬起。
12.由于上述技术方案的运用,本发明与现有技术相比具有下列优点:本发明方案的无人机自动换电基站,结构紧凑,占用面积适中以及放置的位置适用性广,其能自动完成无人机的降落定位,然后将无人机处耗尽的电池取出后放入充电盒料仓的空仓内,并将充电盒料仓内充满的电池送至无人机处,自动完成无人机电池的更换,全过程自动化完成,更换效率和精准度高,同时还能实现多块电池缓存充电的功能,满足了无人机的使用需求。
附图说明
13.下面结合附图对本发明技术方案作进一步说明:附图1为本发明的结构示意图;附图2为本发明的内部结构示意图;附图3为附图2中略去箱体后本发明的内部结构示意图;附图4为升降平台和飞机定位模组相匹配的结构示意图;附图5为附图4的另一视角的结构示意图;附图6为避让门、夹紧模组和停机平台相连的结构示意图;附图7为附图6的另一视角的结构示意图;附图8为飞机定位模组的立体结构示意图;附图9为充电盒料仓的立体结构示意图;附图10为电池取放模块的立体结构示意图;附图11为略去取旋转平台和竖向支架后电池取放模块的立体结构示意图;附图12为装载有电池后附图11的立体结构示意图;其中:箱体1、上开合门2、升降平台3、飞机定位模组4、充电盒料仓5、电池取放模块6、电池7、前开合后10、侧面开合门11、散热门窗12、电控拆卸门13、排水口20、传感器21、避让门30、夹紧模组31、停机平台32、连接架33、丝杆34、定位支架40、第一伺服电机41、第一丝杆42、第一滑轨43、前夹紧块44、第一夹紧块45、第二夹紧块46、第二滑轨47、第二丝杆48、第二伺服电机49、料仓支架50、充电盒51、旋转平台60、竖向支架61、横移支架62、第一伸出组件63、第二横移支架64、第二伸出组件65、夹紧组件66、解锁组件67、平台伺服电机68、横移条310、竖移条311、横移电机312、横移滚轮313、横移同步带314、转接块315、动力电机350、主动滚轮351、从动滚轮352、同步带354、夹爪660、夹紧滑轨661、夹紧电机662。
具体实施方式
14.下面结合附图及具体实施例对本发明作进一步的详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,而不构成对本发明的限制。
15.请参阅附图1
‑
3,本发明一实施例所述的一种无人机自动换电基站,包括箱体1、上开合门2、升降平台3、飞机定位模组4、充电盒料仓5和电池取放模块6;无人机通过上开合门2进入升降平台3后由飞机定位模组4定位,再通过电池取放模块6将无人机上的电池与充电盒料仓5内的充满电的电池更换后自动飞出,从而可以实现无人机电池的自动更换,整个过程全自动化完成,更换效率和精准度高,符合无人机的无人操作换电需求。
16.具体的,所述箱体1为一长方形的框体,所述箱体1内部具有容纳空间,所述箱体1的上端设有可自动开合的两个上开合门2;实际来说,在上开合门2上设有一传感器21,传感器21用于感应无人机的位置,当无人机位于传感器21的感应范围时两个上开合门2自动打开,这样无人机就自动进入到箱体1的容纳空间;其中,两个所述上开合门2之间呈斜面状,且所述低位一端的上开合门上开有用于排水的一列排水口20,这样当本换电基站处于雨天时,雨水通过两个上开合门2的斜面往下流入至排水口20处排出,从而避免雨水的积压。
17.另外,在所述箱体1的前后两端分别设有两个前开合后10和两个后开合门(图中未示出),箱体1的左右两端分别设有两个侧面开合门11,在前后开合门10的下方设有可拆卸
的散热门窗12,便于进行散热;同时在侧面开合门11的下方设有电控拆卸门13,用于方便拆卸本基站中的电器部件。
18.请参阅附图4
‑
7,所述升降平台3可上下升降的设于所述容纳空间内,在所述升降平台3上设有避让门30以及位于避让门30四周的用于夹紧无人机支撑部的夹紧模组31;实际来说,所述升降平台3包括停机平台32、连接架33、丝杆34和动力机构;所述停机平台32设置在容纳空间的中心处,其用于停放无人机;两个所述连接架33设于所述停机平台32的两侧;所述连接架33通过动力机构可上下移动的设于丝杆34的滑动块上,这样就使得升降平台3在容纳空间中进行上下升降的动作。
19.其中,所述动力机构包括动力电机350,所述动力电机350的转轴上设有主动滚轮351,所述主动滚轮351的两侧设有相对设置的从动滚轮352,所述从动滚轮352的一侧设有丝杆滚轮(图中未示出),所述主动滚轮351、从动滚轮352和丝杆滚轮之间通过同步带354相连;这样当动力电机350开始工作时,主动滚轮351通过左右两个从动滚轮352带动两侧的丝杆滚轮转动,丝杆滚轮带动竖向设置的丝杆上的滑动块进行上下移动,滑动块与连接架相连,从而滑动块就可以带动停机平台32进行上下升降的操作。
20.同时,在所述升降平台3上设有避让门30,避让门30由两个可转动的转动门构成,两个所述转动门设置在升降平台3中心的开口处。
21.并且,所述避让门30的四周还设置有夹紧模组31,所述夹紧模组31用于将无人机的底部支撑进行夹紧,从而稳定无人机的位置,夹紧模组31包括设置在停机平台32上的横移组件和竖移组件;所述横移组件包括通过横移驱动机构可相对滑动的两个横移条310,竖移组件包括通过竖移驱动机构可相对滑动的两个竖移条311。
22.具体的,所述横移驱动机构与竖移驱动机构的结构相同,所述横移驱动机构包括由横移电机312驱动在两个横移滚轮313之间的横移同步带314传动,所述横移同步带314上设有同向/反向运动的两个转接块315;所述转接块315与横移条310或竖移条311相连。
23.工作时,无人机停到停机平台32上时,横移驱动机构与竖移驱动机构同步开始工作,这样就带动与连接块315相连的两个横移条310以及两个竖移条311同步相互靠近,进而将无人机支撑部的位置确定。
24.请参阅附图8,所述飞机定位模组4设于所述容纳空间内,且位于所述避让门30的下方,这样当升降平台3往下移动时,飞机定位模组4穿过避让门30后将所述无人机定位;具体来说,所述飞机定位模组4包括定位支架40,所述定位支架40上设有第一伺服电机41,所述第一伺服电机41驱动与第一丝杆42相连的第一滑轨43横向移动,所述第一滑轨43与前夹紧块44相连;所述前夹紧块44的一侧设有相对设置的第一夹紧块45和第二夹紧块46,所述第一夹紧块45和第二夹紧块46设置在对应的第二滑轨47上,两个所述第二滑轨分别与第二丝杆48相连,两个所述第二滑轨经由第二伺服电机49驱动在第二丝杆48上相互靠近或分离。
25.工作时,无人机经由飞机定位模组4将无人机的整体夹紧,此时第一夹紧块45和第二夹紧块46在第二伺服电机49驱动下相互靠近,从而将无人机的左右两端夹紧定位,同时前夹紧块44在第一伺服电机41的驱动将无人机的前端定位夹紧,从而实现对无人机整体的定位夹紧。
26.请参阅附图9,在本实施例中,还包括两个相对设置的充电盒料仓5,每个充电盒料
仓包括料仓支架50,所述料仓支架50上设有竖向设置的三个充电盒51,至少一个所述充电盒内设有电池;其中,所述充电盒为太阳能供电或高压电磁感应供电。
27.请参阅附图10
‑
12,所述电池取放模块6于所述容纳空间内,用于夹取或者放置电池,所述电池取放模块6包括旋转平台60、竖向支架61、横移支架62、第一伸出组件63、第二横移支架64、第二伸出组件65、夹紧组件66和解锁组件67;所述旋转平台60经由平台伺服电机68驱动可在水平方向上进行360
°
的旋转,在旋转平台60上设有竖向支架61,这样竖向支架可以随着旋转平台60进行旋转;在所述竖向支架61上设有通过竖向滑轨可上下移动的横移支架62。
28.所述第一伸出组件63设于所述横移支架62上,所述第一伸出组件63包括经由第一伸出电机驱动的第一伸出丝杆带动第一伸出滑轨滑动,而第二横移支架64设置在第一伸出滑轨上,这样第二横移支架64通过第一伸出组件可在横移支架62上进行横向移动。
29.所述第二伸出组件65可横向移动的设于所述第二横移支架64上;所述第二伸出组件65包括经由第二伸出电机驱动的第二伸出丝杆,所述第二伸出丝杆带动第二伸出滑轨滑动。
30.所述夹紧组件66设于所述第二伸出滑轨上,所述夹紧组件包括经由夹紧电机662和夹紧滑轨661驱动的两个夹爪660,这样两个所述夹爪通过夹紧电机和夹紧滑轨可以将电池夹紧或松开。
31.另外,在所述夹紧组件66的上方还设有解锁组件67,解锁组件67设于所述第二横移支架处,所述解锁组件67用于将无人机处和充电盒料仓的电池卡扣松开。
32.工作时,第一伸出组件解锁组件往前移动,将无人机处的电池下压后弹起,再通过第二伸出组件和夹紧组件的配合将无人机处耗尽的电池取出,然后将电池放入充电盒料仓5内的空闲位,最后再将充电盒料仓5内充满的电池送入无人机的电池放置位中。
33.本换电基站的工作流程如下:1.无人机到达本自动换电基站的上方,两个传感器21感应到无人机处于设定的位置内,两个上开合门2自动打开;同时升降平台上升,无人机降落在升降平台上,并且夹紧模组31对无人机的支撑部进行定位。
34.2.无人机定位后,升降平台下降到位,两个上开合门2自动关闭,此时飞机定位模组4顶开避让门30,飞机定位模组4夹持住无人机。
35.3. 电池取放模块6旋转并伸出至无人机的电池卡扣处,利用解锁组件向下按压弹出电池后抬起,两个夹爪伸出并夹紧电池后取出,然后电池取放模块整体旋转至充电盒料仓5的空仓位,送入电池内,夹爪移至满电池的仓位,伸出夹爪取出电池。
36.4.两个夹爪旋转至无人机装载电池的位置,夹爪将电池推入飞机内,夹爪回待机位置,两个上开合门打开,升降平台上升,无人机起飞后,开合门自动关闭,从而完成无人机的自动换电池操作。
37.本发明的无人机自动换电基站,结构紧凑,占用面积适中以及放置的位置适用性广,其能自动完成无人机的降落定位,然后将无人机处耗尽的电池取出后放入充电盒料仓的空仓内,并将充电盒料仓内充满的电池送至无人机处,自动完成无人机电池的更换,全过程自动化完成,更换效率和精准度高,同时还能实现多块电池缓存充电的功能,满足了无人机的使用需求。
38.以上仅是本发明的具体应用范例,对本发明的保护范围不构成任何限制。凡采用等同变换或者等效替换而形成的技术方案,均落在本发明权利保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。