1.本发明涉及用于车辆的控制装置,更详细地说,涉及容易升级的模块化(modular)控制装置以及使用该模块化控制装置的车辆。
背景技术:
2.车辆(vehicle)是将乘客(passenger)从一个场所移动到另一场所的装置。作为代表性的例子,可以举出汽车。表示车辆与事物之间的通信的v2x(vehicle
‑
to
‑
everything:车联万物)通信技术是指,通过车辆与其他车辆、行人、道路基础设施、服务器等进行通信来提供一系列的服务的技术。
3.为了v2x,如ieee(institute of electrical and electronics engineers:电气和电子工程协会)、3gpp(3rd generation partnership project:第三代合作伙伴计划)等标准化机构提供了多种通信标准。dsrc(dedicated short range communications:专用短距离通信)是基于ieee 802.11的通信标准协议。3gpp的lte(long term evolution:长期演进)和nr(new radio)也提供了用于v2x的通信协议。
4.随着v2x,还出现了部分或完全(fully)自主(autonomous)行驶的车辆。这种自主行驶车辆(autonomous vehicle)有必要与周边车辆、行人、服务器等以低延迟(low latency)和高可靠性地交换更多的数据。
5.最近,随着车辆技术的发展,正在广泛使用车辆用信息娱乐化(infortainment)系统。可以说车辆用信息娱乐化系统是综合性地提供驾驶和导航所需的信息(information)以及各种娱乐项目和人性化的娱乐(entertainment)的系统。
6.虽然,自主行驶或信息娱乐化等多种技术正在应用于车辆,但是这种技术很难应用到现有的车辆中。通常,车辆的耐久年限(durability)达到几年至十年以上。由于上述新技术需要非常大的处理能力,从而可能会难以通过已使用多年的车辆的半导体处理装置来进行处理。
7.随着使用新的技术,可能会需要升级信息娱乐化系统。因此,需要能够较容易升级信息娱乐化系统的技术。
技术实现要素:
8.发明要解决的课题
9.本发明提供一种能够升级的模块化控制装置以及使用该模块化控制装置的车辆。
10.解决课题的技术方案
11.根据本发明的一方面的模块化控制装置,用于车辆,包括:基础框架,安装于所述车辆;以及升级框架,以能够拆卸的方式安装于所述基础框架。在所述基础框架中安装有第一pcb(printed circuit board:印刷电路板),所述第一pcb实现用于提供与所述车辆内的装置之间的接口的基础块,在所述升级框架中安装有具有存储器和主处理器的第二pcb。所述基础框架包括:多个销,用于对准安装所述升级框架的位置;锁定钩,用于将所述升级框
架固定于所述基础框架;以及锁定孔,用于通过所述升级框架的锁定杆被插入到所述锁定孔,并且所述锁定杆旋转,来使所述升级框架固定于所述基础框架。
12.根据本发明另一方面的基础框架,用于车辆用的模块化控制装置,所述基础框架包括:基体,安装有pcb,且升级框架以能够拆卸的方式安装于所述基体,所述pcb实现用于提供与所述车辆内的装置之间的接口的基础块;多个销,用于对准安装所述升级框架的位置;锁定钩,用于将所述升级框架固定于所述基础框架;以及锁定孔,用于通过所述升级框架的锁定杆被插入到所述锁定孔,并且所述锁定杆旋转,来使所述升级框架固定于所述基础框架。
13.根据本发明的另一方面的车辆,包括:引擎;显示装置,向驾驶者显示车辆的行驶信息;以及模块化控制装置,向所述显示装置提供所述行驶信息。所述模块化控制装置包括:基础框架,安装于所述车辆;以及升级框架,以能够拆卸的方式安装于所述基础框架。
14.发明效果
15.提供一种能够根据车辆的功能进行升级的控制装置。
附图说明
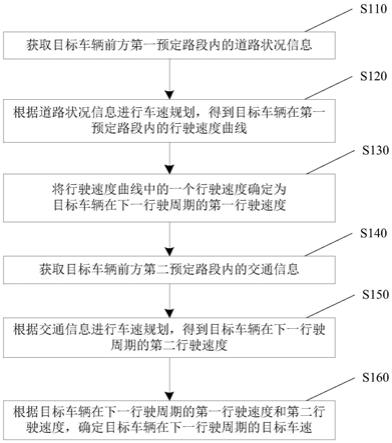
16.图1表示使用实施例的系统。
17.图2是表示实施本实施例的车辆的框图。
18.图3表示本发明的一实施例的模块化控制装置。
19.图4表示用于检测出有效的升级块的方法。
20.图5表示当车辆的引擎熄灭时,模块化控制装置在低功率(low power)模式下的动作。
21.图6表示当车辆的引擎启动时,模块化控制装置的启动(booting)动作。
22.图7表示内置模块化控制装置的框架。
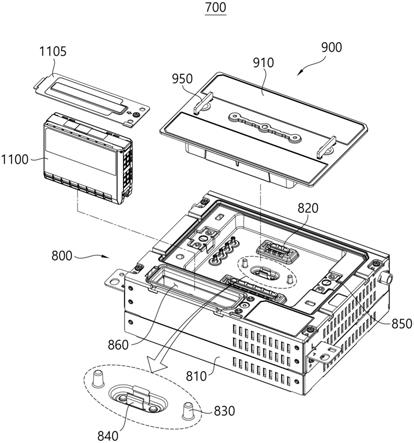
23.图8表示用于模块化控制装置的框架的分解立体图。
24.图9表示升级框架的底面。
具体实施方式
25.下面,参照附图对本说明书(disclosure)所揭示的实施例进行详细的说明,在此,与图号无关地对相同或类似的结构要素赋予相同的参照标记,并将省去对其重复的说明。在以下说明中使用的针对结构要素的后缀“模块”及“部”仅是考虑到便于说明书的撰写而被赋予或混用,其自身并不带有相互区分的含义或作用。并且,在对本说明书揭示的实施例进行说明的过程中,如果判断为对于相关的公知技术的具体说明会导致混淆本说明书所揭示的实施例的技术思想,则将省去对其详细的说明。并且,所附的附图仅是为了容易理解本说明书所揭示的实施例,不应由所附的附图来限定本说明书所揭示的技术思想。
[0026]“第一”、“第二”等包含序数的术语可用于说明多种结构要素,但是所述结构要素并不由所述术语所限定。所述术语仅是用于将一个结构要素与其他结构要素区分的目的来使用。
[0027]
如果提及到某个结构要素“连接(connected)”或“耦合(coupled)”于另一结构要素,则应理解为其可能是直接连接或耦合于该另一结构要素,但也可能它们中间存在其他
结构要素。反之,如果提及到某个结构要素“直接连接”或“直接耦合”于另一结构要素,则应当被理解为是它们之间不存在有其他结构要素。
[0028]
除非在上下文明确表示有另行的含义,否则单数的表达方式包括复数的表达方式。
[0029]
在本技术中,“包括”或“具有”等术语仅是为了指定说明书上记载的特征、数字、步骤、动作、结构要素、部件或其组合的存在,而并不意在排除一个或其以上的其他特征或数字、步骤、动作、结构要素、部件或其组合的存在或添加的可能性。
[0030]
在以下的说明中,车辆的左侧表示车辆的前进行驶方向的左侧,车辆的右侧表示车辆的前进行驶方向的右侧。
[0031]
图1表示使用实施例的系统。
[0032]
系统100包括车辆200、基站110以及服务器120。车辆200可通过使用无线通信协议来与基站110以及/或周边车辆130进行通信。无线通信协议没有限制,例如,可以包括基于ieee(institute of electrical and electronics engineers:电气和电子工程协会)802.11的dsrc(dedicated short range communications:专用短距离通信)或者wifi、以及/或基于3gpp(3rd generation partnership project:第三代合作伙伴计划)的蜂窝通信(例如,wcdma(wideband code division multiple access:宽带码分多址)、lte(long term evolution:长期演进)、nr(new radio)等)。
[0033]
基站110可以通过使用dsrc、lte、nr、wifi等各种无线通信协议来与车辆200或其他基站进行通信。
[0034]
服务器120包括与一个或其以上的基站110连接而向车辆200提供自主行驶数据服务的计算硬件。例如,所述计算硬件可以包括处理器和存储器。存储器可以存储在以下的实施例中说明的地图数据和行驶环境信息,处理器可以将该数据提供给车辆200。处理器可以基于从一个或其以上的车辆200接收到的数据,更新地图数据。
[0035]
车辆200可以包括用于运输(transport)人或物件的各种类型的汽车(automobile)、货车、飞机、船等。车辆200可以使用内燃机以及/或电动电机作为动力源。车辆200可以被设定为能够自主地动作。自主行驶可以是指例如,在没有驾驶人的帮助下行驶。在自主行驶模式下,车辆200可以设定为检测周边车辆130并能够判断所检测到的车辆的路径。车辆200可以通过与周边车辆130进行通信来交换信息。车辆200可以彼此切换自主行驶模式和手动行驶模式。在手动行驶模式下,车辆200也能向驾驶者提供有用的路径信息,或支援各种adas(advanced driver assistance system:高级驾驶辅助系统)。
[0036]
图2是表示实施本实施例的车辆的框图。
[0037]
车辆200可以包括控制装置(control device)210、加速装置(acceleration device)230、制动装置(braking device)240、转向装置(steering device)250、感应装置(sensing device)260、引擎(engine)270。所提到的装置仅为示例,并非所有的装置是必需的。车辆200还可以追加其他装置,或者省略特定装置。在这些装置中,有的装置可以具有自身的处理器,并进行与该装置的特定功能关联的处理。
[0038]
加速装置230可以是被设定为使车辆200加速的机制。制动装置240可以是被设定为使车辆200减速的机制。转向装置250可以是被设定为调整车辆200的方向的机制。车辆200可以通过加速装置230来加速、通过制动装置240来减速、通过转向装置250来改变行驶
方向。为了控制车辆200的速度和方向,可以通过控制装置210以及/或额外的控制器来控制加速装置230、制动装置240以及转向装置250中的至少一个。
[0039]
感应装置260可以包括一个或其以上的传感器,所述传感器设定为感测车辆200的位置/速度以及/或关于车辆200的环境的信息。感应装置260可以包括检测车辆200的地理位置的位置传感器和识别车辆200周边的物体(object)的物体检测传感器。位置传感器可以包括gps(global positioning system)接收器。位置传感器还可以包括用于确定车辆200的方向、速度以及它们的变化的加速度计(accelerometer)、陀螺仪(gyroscope)等。物体检测传感器可以包括摄像头、雷达、超声波传感器以及红外线传感器中的至少一种。
[0040]
感应装置260可以包括状态传感器,所述状态传感器被设定为感测车辆200的状态。状态传感器可以包括imu(inertial navigation unit:惯性导航单元)传感器、碰撞传感器、车轮传感器(wheel sensor)、速度传感器、倾角传感器、重量检测传感器、航向传感器(heading sensor)、定位模块(position module)、车辆前进/后退传感器、电池传感器、燃油传感器、轮胎传感器、基于方向盘旋转的转向传感器、车辆内部温度传感器、车辆内部湿度传感器、超声波传感器、照度传感器、油门踏板位置传感器以及刹车踏板位置传感器中的至少一种。感应装置260可以获取关于车辆姿势信息、车辆运动信息、车辆偏航(yaw)信息、车辆翻滚(roll)信息、车辆仰俯(pitch)信息、车辆碰撞信息、车辆方向信息、车辆角度信息、车辆速度信息、车辆加速度信息、车辆坡度信息、车辆前进/后退信息、电池信息、燃油信息、轮胎信息、车辆灯信息、车辆内部温度信息、车辆内部湿度信息、方向盘旋转角度、车辆外部照度、施加到油门踏板的压力、施加到刹车踏板的压力等的感测信号。
[0041]
控制装置210可以通过与加速装置230、制动装置240、转向装置250以及感应装置260进行通信,来交换各种信息或控制这些装置。
[0042]
控制装置210可以包括处理器211和存储器212。控制装置210可以根据功能包括一个或一个以上的子装置,各个子装置可以包括处理器和存储器中的至少一种,并进行与该子装置的功能关联的处理。例如,控制装置210可以包括负责车辆200内部和外部的通信的tcu(telematics control unit:远程信息处理控制单元)。控制装置210可以包括负责自主行驶的自主行驶装置。控制装置210可以包括向乘客显示行驶信息或提供各种娱乐的信息娱乐化系统或者avn(audio video navigation:音视频导航)系统。根据以下的实施例,控制装置210可以包括tcu或信息娱乐化系统。或者,控制装置210也可以包括tcu和信息娱乐化系统的组合或其他功能的组合。
[0043]
处理器211可以包括asic(application
‑
specific integrated circuit:专用集成电路)、cpu(central processing unit)、ap(application processor:应用处理器)、dsps(digital signal processors:数字信号处理器)、微控制器、芯片组、逻辑电路、数据处理装置以及/或它们的组合。在以下实施例的软件实现中,执行在此说明到的功能的软件代码,可以存储于存储器212,并由处理器211处理。
[0044]
存储器212可以存储处理器211能够访问的信息。所述信息可以包括处理器211能够执行的指令(instructions)以及/或通过处理器来处理的数据。存储器212可以包括以能够存储信息的方式动作的任意形态的计算机可读的介质(computer
‑
readable medium)。例如,存储器212可以包括rom(read only memory)、ram(random access memory)、dvd(digital video disc)、光盘(optical disc)、闪存、ssd(solid state drive:固态驱动
器)、硬盘驱动器(hard drive)以及它们的组合。
[0045]
虽然,示出了以一个物理模块包括了处理器和存储器的控制装置210,但是,控制装置210可以包括多个处理器和多个存储器,并可以在物理上或逻辑上可操作地连接。
[0046]
控制装置210可以与用于显示信息的显示装置280连接。显示装置280包括lcd(liquid crystal display)触摸屏或oled(organic light emitting diode)触摸屏,并且可以包括用于检测乘客的状态或手势的各种传感器(摄像机、麦克风(microphone)等)。
[0047]
控制装置210可以与无线调制解调器290连接,所述无线调制解调器290被设定为与其他设备进行通信。控制装置210可通过无线调制解调器290来与车辆200内部/外部移动设备或服务器(图1的120)或周边车辆交换无线信号。无线调制解调器290支持的无线通信协议没有限定,无线调制解调器290可以支持蜂窝通信、wifi、bluetooth、zigbee、红外线链接等各种无线通信协议。
[0048]
控制装置210的存储器212可以具有地图信息以及/或行驶计划数据(driving plan data)。行驶计划数据可以包括用于追踪车辆200从当前位置到目的地为止的车辆的位置的关于车辆路径(trajectory)的信息。行驶计划数据可以为了向驾驶者引导路径或自主行驶而使用。地图信息可以包括用于定义行驶环境的各种地图。地图信息可以包括道路(roadway)的形状和高程(elevation)、车道(lane line)、交叉路口(intersection)、人行横道(crosswalk)、限速(speed limit)、交通信号(traffic signal)、建筑或其他物体或信息。地图信息可以还包括实时交通量信息、道路上的障碍物(obstruction)、道路状态信息等。地图信息和行驶计划数据可以基于服务器120提供的信息来进行更新,或基于车辆200的感应装置260检测到的信息来进行更新。
[0049]
引擎270向车辆200提供推进力(propulsion)。引擎270可以包括内燃机(internal combustion engine)、电动电机或它们的组合。
[0050]
下面,基于前述车辆200对本说明书的实施例的模块化控制装置进行说明。模块化控制装置可以在功能上与图2的控制装置210对应,还可以进一步包括图2的其他装置中的至少一个。模块化控制装置可以包括存储器和至少两个处理器。
[0051]
图3表示本说明书的一实施例的模块化控制装置。
[0052]
模块化控制装置300包括基础块(base block)310和升级块(upgrade block)350。基础块310可以固定并安装于车辆内部。升级块350可以以能够拆卸的方式安装于基础块310。升级块350可以根据车辆提供的功能而更换。
[0053]
基础块310包括辅助处理器(auxiliary processor)311、接口模块312以及供电模块(power supply module)313。
[0054]
辅助处理器311提供与升级块350的连接管理,以及基于接口模块312提供车辆和升级块350之间的连接管理。基础块310的功能可以通过辅助处理器311来实现。辅助处理器311可以包括功耗较低的微控制器。辅助处理器311可以包括瑞萨电子(renesas electronics)的rh850微控制器,但是不限于此。
[0055]
接口模块312提供用于模块化控制装置300和车辆内设备之间的通信的接口。接口模块312可以提供因特网、can(controller area network:控制器局域网)、lin(local interconnect network:局域互联网络)、usb(universal serial bus:通用串行总线)、雷电接口等多种通信协议。接口模块312可以提供与车辆的显示装置(图2的280)的连接,由此
使由模块化控制装置300提供的信息显示于显示装置(图2的280)。
[0056]
供电模块313向基础块310和升级块350供电。基础块310可以在判断为升级块350正常动作的状态下,使电源供给到升级块350。当升级块350未正常动作或连接了错误的升级块350时,基础块310可以不开始向升级块350的供电。为了在引擎熄灭之后供电,供电模块313可以包括电池(未图示)。供电模块313包含在基础块310中,但这只不过是示例。供电模块313也可以被包含于升级块350,或者被安装在不是模块化控制装置300的额外的模块中。
[0057]
升级块350包括主处理器351、存储器352、检查电路(checking circuit)353以及rf(radio frequency:无线射频)模块354。
[0058]
主处理器351可以在车辆中执行模块化控制装置300的功能。通过主处理器351,可以实现控制装置(图2的210)的功能中的一部分或全部。主处理器351可以根据所提供的功能而更换为具有低处理能力的处理器或具有高处理能力的处理器。与辅助处理器311相比,主处理器351的耗电可以更高,并且具有更高的处理能力。主处理器351可以包括多种soc(system on chip:片上系统)。例如,主处理器351可以包括qualcomm(高通)的snapdragon处理器,但这只不过是示例。
[0059]
存储器352存储通过主处理器351来执行的指令(instructions)以及/或应用。存储器352可以包括ufs(universal flash storage:通用闪存)、lpddr sdram(low
‑
power double data rate synchronous dynamic random access memory:低功耗双倍数据率同步动态随机存取存储器)或它们的组合。
[0060]
检查电路353是用于基础块310以物理方式确认所安装的升级块350是否能够正常动作的电路。当升级块350与基础块310结合之后第一次被供电时,基础块310可以首先通过检查电路353来确认升级块350是否为物理上正常的升级块350,之后可以从软件方面确认是否正常动作。
[0061]
在一实施例中,检查电路353可以包括电阻(resistance)。基础块310可以通过使特定电流流过检查电路353并测量电压,来确认是否为正常的升级块350。例如,假设第一升级块设定为第一电阻,而第二升级块设定为第二电阻。若通过测量电压而识别到第一电阻,则基础块310可以判断为是所述第一升级块,若未检测到第一电阻和第二电阻中的任一个,则基础块310可以判断为是无法动作的(或无效的)升级块。
[0062]
在另一实施例中,检查电路353可以包括识别升级块的一个或其以上的开关。例如,假设第一升级块设定为第一开关on,第二升级块设定为第二开关on。若所结合的升级块350的检查电路353的第一开关为on,则基础块310可以判断为是所述第一升级块。
[0063]
rf模块354可以支持蜂窝通信、wifi、bluetooth、zigbee、红外线链接等多种无线通信协议,但是不限定所支持的无线通信协议。rf模块354可以包括无线调制解调器(图2的290)的一部分或全部。虽然,rf模块354被包含在升级块350中,但这仅为示例。rf模块354可以被包含在基础块310中,或者安装于不是模块化控制装置300的额外的模块中。
[0064]
有效的升级块是指处于能够与安装于车辆的基础块正常动作的状态的升级块,无效的(invalid)升级块是指处于无法正常地与安装于车辆的基础块动作的状态的升级块。无效的升级块可能是因为安装了未得到认证的升级块或安装错误(冲击导致的分离,用户作出的任意分离等)而引起的。若检测到无效的升级块,则基础块可以切断向升级块的供
电。基础块可以向驾驶者发出警告,或将无效的升级块注册到服务器。
[0065]
图4表示用于检测出有效的升级块的方法。这可以由基础块310的辅助处理器311来执行。
[0066]
在步骤s410中,若安装升级块350或接收到新的电源,则基础块310通过升级块350的检查电路353来确认是否为有效的升级块。例如,当将有效的升级块的电阻设定为第一电阻时,基础块310基于供给到检查电路353的电流来测量电压。基于测量到的电压和电流来计算检测电阻,当检测电阻在第一电阻的误差范围以内时,可以确认为是有效的升级块。
[0067]
在步骤s420中,基础块310从升级块350接收检查消息。在供电开始之后的特定时间内,升级块350向基础块310发送检查消息。当在所述特定时间之内未收到检查消息或接收到无效的检查消息时,基础块310可以视为是无效的升级块。所述特定时间可以预先设定为5秒~60秒之间的时间,但不限于此。
[0068]
升级块350可以在发送初始检查消息之后周期性地发送检查消息。这是为了检测在动作过程中发生的安装错误(冲击导致的分离、用户作出的任意分离)。若在所述周期内未接收到检查消息或接收到无效的检查消息,则基础块310可以视为是无效的升级块。所述周期可以预先设定为5秒~60秒之间的时间,但是不限于此。所述周期可以根据升级块350的负荷(load)状态而变更。
[0069]
检查消息可以包括关于升级块350的软件版本和升级块350的硬件版本的信息。硬件版本可以按可安装的多个升级块来表示硬件配置(例如,是否包括rf模块等)或主处理器信息等。检查消息可以包括升级块350的标识符。
[0070]
通过基于检查电路353的物理检查和基于检查消息的逻辑检查,基础块310可以检测出所安装的升级块350是否有效。因此,能够防止因安装错误的升级块而引起的错误。
[0071]
图5表示当车辆的引擎熄灭时模块化控制装置在低功率(low power)模式下的动作。
[0072]
基础块若接收到引擎off信号,则将该off信号传送给升级块(s510)。
[0073]
升级块在正在运行中的应用中选择启动(booting)时要运行的一个或一个以上的应用(将其称作开始(starting)应用)(s520)。开始应用可以包括当引擎启动时最先运行的一个或一个以上的应用。升级块可以结束剩余的应用。
[0074]
升级块将开始应用排列在存储器内的开始区域(s530)。存储器可以包括多个存储区域。开始区域是指多个存储区域中在低功率模式下被供电的区域。在存储器内,电源不会供给到除了开始区域之外的剩余的存储区域。升级块中仅所述开始区域可以被供电。
[0075]
升级块对基础块指示切换(switching)到低功率模式(s540)。在低功率模式下,基础块可以周期性地检查引擎on状态。
[0076]
图6表示当车辆的引擎启动时模块化控制装置的启动(booting)动作。
[0077]
若接收到引擎on信号,则基础块向升级块发送唤醒(wake
‑
up)信号(s610)。
[0078]
升级块首先运行存储于存储器的开始区域的开始应用(s620)。之后,依次运行剩余的应用。
[0079]
若引擎熄灭,则可以在低功率模式下消耗最少的电力,若引擎启动,则可以重新在最短时间内向驾驶者提供信息。
[0080]
图7表示内置模块化控制装置的框架。
[0081]
用于模块化控制装置的框架700包括基础框架800和升级框架900。基础框架800包括基础块310。基础块310可以以pcb(printed circuit board:印刷电路板)形态安装于基础框架800。基础框架800固定安装于车辆内部。升级框架900包括升级块350。升级块350可以以pcb形态安装于升级框架900。升级框架900可以任意地安装到基础框架800或者从基础框架800拆卸。
[0082]
图8表示用于模块化控制装置的框架的分解立体图。图9表示升级框架的底面。
[0083]
有必要使升级框架900容易安装到基础框架800或从基础框架800拆卸。另外,在车辆行驶中,若在基础框架800和升级框架900之间的连接发生错误,则无法向驾驶者显示运行信息等。因此,有必要将升级框架900紧密地捆绑(bind)到基础框架800,以在行驶中即便发生冲击或振动,也不会使连接断开。
[0084]
基础框架800包括基体810、一个或一个以上的连接器820、多个销830、锁定钩(fasten hook)840、锁定孔(fasten hole)850、电池座860。
[0085]
升级框架900包括主体910、一个或一个以上的连接器920、多个孔930、钩槽940、锁定杆950。
[0086]
在基体810的内部安装有实现基础块310的pcb。在升级框架900的主体910内部安装有实现升级块350的pcb。基础框架800的连接器820与升级框架900的连接器920连接。
[0087]
基础框架800的多个销830插入到升级框架900的多个孔930中,由此使升级框架900在准确的位置与基础框架800结合。虽然示出了多个销830的数量为两个的情形,但这仅为示例,所述多个销830可以是三个或四个。
[0088]
基础框架800的锁定钩840插入到升级框架900的钩槽940中,由此使升级框架900固定于基础框架800。基础框架800的锁定钩840包括一对板(plate)。各个板的末端弯曲,并插入到钩槽940中。
[0089]
在升级框架900的锁定杆950的上端设置有供使用者旋转的把手,其下端设置有插入到基础框架800的锁定孔850的销。在锁定杆950的销形成有螺旋形状的孔。随着锁定杆950旋转,锁定孔850的凸起紧密地与该孔结合。
[0090]
在基础框架800的电池座860中被插入在低功率模式下供电的电池1100。电池盖1105组装于基体810,并保护电池1100。
[0091]
若松开锁定杆950,则升级框架900可以从基础框架800分离。若锁紧锁定杆950,则升级框架900固定于基础框架800。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。