1.本发明涉及一种激光法测量重力加速度装置。
背景技术:
2.重力加速度是地球物理研究中的一个基本矢量,也是对一般力学系统进行力学分析时需要考虑的一个重要参数。从古至今,从牛顿在苹果树下发现万有引力开始,人们尝试过很多测量重力加速度的方法,例如,伽利略滚球实验、单摆测量法、打点计时器测量法、滴水法、斜槽平抛测量法等等,但是,囿于测量仪器和测量条件的限制,低成本的重力加速度的测量精度不够,而测量精准的工程化原子重力仪、紧凑型冷原子重力仪等所耗费的成本又太高,重力加速度的精度始终保持在小数点后五位。
3.一般的测量是通过传统测量方法大致测量重力加速度,但精度一般都不高,且不可控误差较大,影响实验的精准性,而我们的测量装置通过us级的响应时间来测量该地区的重力加速度。
技术实现要素:
4.针对以上所述,本发明提供了一种激光法测量重力加速度装置,以解决上述背景技术中提出的问题。
5.本发明解决其技术问题所采用的技术方案是:提供了一种激光法测量重力加速度装置,包括装置外壳、用于重力加速度测量的测量装置、用于激光信号收发的信号收发处理装置、用于测量数据处理的数据处理装置,所述装置外壳内设有可将装置外壳内部抽成真空环境的微型真空泵部件;所述测量装置、信号收发处理装置设置在装置外壳内部;所述测量装置包括钢架台、多隔间遮光的等间距空隙挡板、可吸附释放等间距空隙挡板的电磁铁,所述钢架台上设有滑轨,滑轨上活动固定有电磁铁,电磁铁吸附释放等间距空隙挡板,电磁铁在滑轨上下移动,可实现等间距空隙挡板在不同高度的自由落体;所述信号收发处理装置包括激光发射器、光敏传感器及单片机,所述激光发射器与光敏传感器设置在钢架台上,位于电磁铁及等间距空隙挡板的左、右两侧,激光发射器的激光光束照射方向与等间距空隙挡板的多间隔面相垂直,并平行的对准光敏传感器,所述单片机设置在钢架台上,单片机的输入端与光敏传感器的输出端连接,单片机的输出端与数据处理装置的输入端连接;激光发射器发射激光光束到达光敏传感器的光敏电阻上,形成连续性的光电信号闭合,当等间距空隙挡板从电磁铁上作自由落体运动时,其不透光部分挡住激光光束,光敏传感器输出低电平信号给单片机,单片机内部定时器启动由time1变time0,记为闭光时间;当透光部分穿过激光光束时,光敏电阻与激光光束重新连接,光敏传感器输出高电平信号给单片机,单片机内部定时器启动由time0变为time1,记为透光时间,单片机通过串口通信将定时器上个状态的持续时间数据实时发送到电脑服务终端;所述数据处理装置包括电脑服务终端、适配线,电脑服务终端通过适配线与单片机、电磁铁电性连接,电脑服务终端使用专业的数据处理软件origin对其与单片机传输的数据进行判断、误差分析、数据拟合、插值运
算、绘图处理;还包括用于放置自由落体后等间距空隙挡板的接受存储箱,所述接受存储箱设置在装置外壳内部,位于等间距空隙挡板的下方。
6.进一步,所述装置外壳由高强度玻璃外壳制作而成,装置外壳上设有开口,连接电脑服务终端的适配线可通过开口穿出,且开口上设有可完全密封的密封垫。
7.进一步,所述微型真空泵部件包括微型真空泵、可检测装置外壳内是否为真空环境的真空压力传感器,微型真空泵的输入端连接电脑服务终端,真空压力传感器的输出端连接电脑服务终端。
8.进一步,所述等间距空隙挡板上设有与电磁铁相吸附的铁片,通过铁片可转动等间距空隙挡板。
9.本发明的有益效果是:本发明的测量重力加速度装置利用等间距空隙挡板的自由下落和激光直射光敏传感器的光敏电阻响应相结合,将光敏传感器和单片机连接,当等间距空隙挡板的空隙下降到与激光发射器同一水平时,激光透过空隙打到光敏电阻上,在单片机上呈现响应为高电平;反之,当激光被等间距挡板遮挡时,光敏电阻无法接受光照,在单片机上响应为低电平,通过高低电平交替反映出激光通过等间距空隙挡板间隔的时间,从而获得不同的时间间隔t,单片机会通过串口通信将定时器上个状态的持续时间数据实时发送到电脑服务终端,电脑服务终端使用专业的数据处理软件origin对其与单片机传输的数据进行判断、误差分析、数据拟合、插值运算、绘图等处理,即可获得测量的重力加速度g,与理论值进行对比,计算其相对误差和绝对误差,且本发明的测量重力加速度装置与实验室的测量装置相比,我们的装置简易、便于操作测量,易推广,可以直接通过电脑与单片机相连获得相应的数据,单片机自动化程度高,大大提高了测量效率,性价比高,相对于其他实验设备成本较低,由于光敏电阻响应快,单片机测量时间精度可达到微秒级,大大提高了测量精度。
附图说明
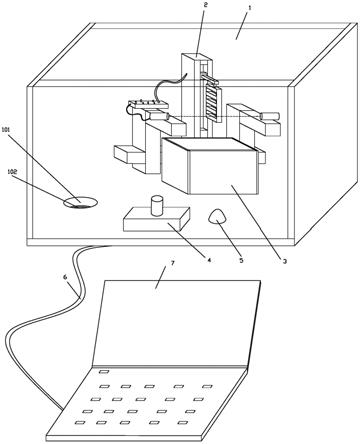
10.图1是本发明的结构示意图。
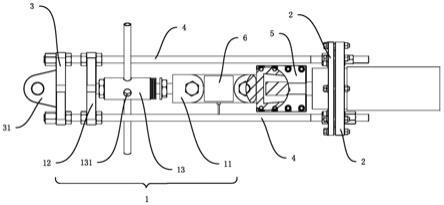
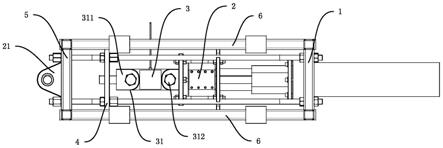
11.图2是测量装置、信号收发处理装置的结构示意图。
12.图3为本发明的流程示意图。
13.图4是本发明的测试数据图。
14.图5是本发明的数据拟合曲线图。
15.在图中,1、装置外壳;101、开口;102、密封垫;2、钢架台;201、滑;3、接受存储箱;4、微型真空泵;5、真空压力传感器;6、适配线;7、电脑服务终端;8、单片机;9、光敏传感器;10、激光发射器;11、电磁铁;12、等间距空隙挡板。
具体实施方式
16.下面根据附图和一些实施方式对本发明做进一步的说明。
17.在图1
‑
图3中,一种激光法测量重力加速度装置,包括装置外壳1、用于重力加速度测量的测量装置、用于激光信号收发的信号收发处理装置、用于测量数据处理的数据处理装置,所述装置外壳1内设有可将装置外壳1内部抽成真空环境的微型真空泵部件;所述测量装置、信号收发处理装置设置在装置外壳1内部;所述测量装置包括钢架台2、多隔间遮光
的等间距空隙挡板12、可吸附释放等间距空隙挡板12的电磁铁11,所述钢架台2上设有滑轨201,滑轨201上活动固定有电磁铁11,电磁铁11吸附释放等间距空隙挡板12,电磁铁11在滑轨201上下移动,可实现等间距空隙挡板12在不同高度的自由落体;在实验测量之前,做好准备工作,移动电磁铁11至实验预定的位置,将等间距空隙挡板12吸附在电磁铁11上,并通过信号收发处理装置的信号发生,调控电磁铁11的动作,实现等间距空隙挡板12在不同高度的自由落体,获得不同的测量时间间隔值,使实验具有随机性;且精准设计的等间距空隙挡板12,实现同等间隔距离的透光与挡光,大大展现了创新性,利用电磁铁11控制释放等间距空隙挡板12,避免了人为因素的干扰,减小了传统自由落体法中带来的测量误差,提高了测量精度。
18.在本实施例中,所述信号收发处理装置包括激光发射器10、光敏传感器9及单片机8,所述激光发射器10与光敏传感器9设置在钢架台2上,位于电磁铁11及等间距空隙挡板12的左、右两侧,激光发射器10的激光光束照射方向与等间距空隙挡板12的多间隔面相垂直,并平行的对准光敏传感器9,所述单片机8设置在钢架台2上,单片机8的输入端与光敏传感器9的输出端连接,单片机8的输出端与数据处理装置的输入端连接;将激光发射器10启动,发射出绿色激光束,调节激光发射器10的位置,使激光发射器10发射激光光束到达光敏传感器9的光敏电阻上,形成连续性的光电信号闭合,通过信号传输对电磁铁11断电,等间距空隙挡板12从电磁铁11上作自由落体运动,其不透光部分挡住激光光束,光敏传感器9输出低电平信号给单片机8,单片机8内部定时器启动由time1变time0,记为闭光时间;当透光部分穿过激光光束时,光敏电阻与激光光束重新连接,光敏传感器9输出高电平信号给单片机8,单片机8内部定时器启动由time0变为time1,记为透光时间;多个不透光部分、透光部分交替依次经历激光束,在不透光部分遮挡激光束时,单片机8会通过串口发送上一个状态(即透光状态)的持续时间time1;在透光部分遮挡激光束时,单片机8会通过串口发送上一个状态(即闭光状态)的持续时间time0;在空隙挡板的上表面离开激光光束时,本次实验的测量结束,此时单片机8应该已经向电脑端传输了十条数据,且时间状态应依次为time1、time0、time1、time0、time1、time0、time1、time0、time1、time0;
19.在本实施例中,所述数据处理装置包括电脑服务终端7、适配线6,电脑服务终端7通过适配线6与单片机8、电磁铁11电性连接,电脑服务终端7使用专业的数据处理软件origin对单片机8发送的数据进行初步判断、误差分析、数据拟合、插值运算、绘图处理等,即去除量纲,绘制表格,再绘制散点图并进行分析、拟合出x
‑
t图像,通过拟合得到公式x=1/2,即可活得测量的重力加速度g,与理论值进行对比,计算其相对误差和绝对误差;
[0020][0021]
符号释意表
[0022]
质地均匀的等间距空隙挡板12通过电磁铁11吸附在钢架台2上,断开电源让等间距空隙挡板12自由下落,单片机8响应测得激光发射器10、光敏传感器9的照射时间与遮挡时间,此时,
[0023][0024]
式中,x为均匀的等间距空隙挡板12间隔长度,v0、v1
[0025]
为一个透光间隙透光一次前后整体的的瞬时速度,g为重力加速度,t1、t2分别为透光间隙透光时间和与其相邻的不透光等间距部分挡光时间。
[0026]
将(3)式变形,得
[0027]
v0=v1
‑
gt1
……………………………④
代入式(1)式得
[0028][0029]
将式(2)(4)联立,即
[0030][0031]
由式(2)表示出v1,即
[0032][0033]
将(5)代入(4)中,逐步整理得
[0034][0035][0036]
综合计算得g与x、t1、t2的关系,即
[0037][0038]
由上述电脑服务终端7对数据处理结果,可以看到拟合曲线的r^2=0.99991≈1,即在0.001的置信水平下,该组数据的拟合可信,即该次测量重力加速度的符合该x
‑
t图像,且计算可得g值为9.75528,相对误差为:0.39%。
[0039]
在本实施例中,还包括用于放置自由落体后等间距空隙挡板12的接受存储箱3,所述接受存储箱3设置在装置外壳1内部,位于等间距空隙挡板12的下方;等间距空隙挡板12自由落体后掉落在接受存储箱3,避免等间距空隙挡板12摔坏,影响以后的实验测量。
[0040]
在本实施例中,所述装置外壳1由高强度玻璃外壳制作而成,装置外壳1上设有开口101,连接电脑服务终端7的适配线6可通过开口101穿出,且开口101上设有可完全密封的密封垫102;所述微型真空泵部件包括微型真空泵4、可检测装置外壳1内是否为真空环境的真空压力传感器5,微型真空泵4的输入端连接电脑服务终端7,真空压力传感器5的输出端连接电脑服务终端7;实验测量准备工作时,将测量装置、信号收发处理装置放置在装置外壳1内部,电脑服务终端7通过适配线6的信号传输,调控微型真空泵4发生动作,将装置外壳1内部抽成真空环境,真空压力传感器5进行检测确定为真空环境后,传输信号到电脑服务终端7中,方便下一阶段的实验进行,在真空环境进行实验测量,避免了空气阻力对实验数据的影响。
[0041]
在本实施例中,所述等间距空隙挡板12上设有与电磁铁11相吸附的铁片,通过铁片可转动等间距空隙挡板12;将等间距空隙挡板12带有铁片的一端与电磁铁11相吸附,待其吸附后,微微转动,使激光光束的照射方向正好与等间距空隙挡板12的多间隔面(即空隙面)相垂直,待挡板稳定后,再进行下一步实验。
[0042]
在本实施例中,本发明的调控电路为电路领域内的常见电路,所属技术领域的技术人员都能够实现,在此不做赘述。
[0043]
在本实施例中,所述单片机8为常见的电子元器件,例如at89c2051型号tms320vc5509a型号、stm32型号单片机。
[0044]
在本实施例中,所述微型真空泵4为常见的真空泵设备,例如wd
‑
pk4512型号、qh9/4020n型号微型真空泵等。
[0045]
在本实施例中,所述真空压力传感器5为常见的真空压力传感器设备,例如sin
‑
px300型号、sin
‑
p350型号真空压力传感器等。
[0046]
在本实施例中,所述光敏传感器9为常见的光敏传感器设备,例如lxd
‑
gb5
‑
a1e型号、gb5
‑
a1dpz型号光敏传感器等。
[0047]
在本实施例中,所述激光发射器10为常见的可发射出绿色的、可视化激光束的激光发射器,例如fu650ad5
‑
c9型号、fu650ad5
‑
bc9型号激光发射器10等。
[0048]
本发明在具体实施时:在实验测量之前,做好准备工作,将测量装置、信号收发处理装置放置在装置外壳1内部,等间距空隙挡板12带有铁片的一端与电磁铁11相吸附,待其吸附后,微微转动,使激光发射器10发射激光光束与等间距空隙挡板12的多间隔面(即空隙面)相垂直,并到达光敏传感器9的光敏电阻上,形成连续性的光电信号闭合,微型真空泵4将装置外壳1内部抽成真空环境,真空压力传感器5进行检测确定为真空环境后,通过信号传输对电磁铁11断电,等间距空隙挡板12从电磁铁11上作自由落体运动,其不透光部分挡住激光光束,光敏传感器9输出低电平信号给单片机8,单片机8内部定时器启动由time1变time0,记为闭光时间;当透光部分穿过激光光束时,光敏电阻与激光光束重新连接,光敏传感器9输出高电平信号给单片机8,单片机8内部定时器启动由time0变为time1,记为透光时间;多个不透光部分、透光部分交替依次经历激光束,在不透光部分遮挡激光束时,单片机8会通过串口发送上一个状态(即透光状态)的持续时间time1;在透光部分遮挡激光束时,单片机8会通过串口发送上一个状态(即闭光状态)的持续时间time0;在空隙挡板的上表面离开激光光束时,本次实验的测量结束,此时单片机8应该已经向电脑端传输了十条数据,且时间状态应依次为time1、time0、time1、time0、time1、time0、time1、time0、time1、time0;电脑服务终端7使用专业的数据处理软件origin对单片机8发送的数据进行初步判断、误差分析、数据拟合、插值运算、绘图处理等,即去除量纲,绘制表格,再绘制散点图并进行分析、拟合出x
‑
t图像,通过拟合得到公式x=1/2,即可活得测量的重力加速度g,与理论值进行对比,计算其相对误差和绝对误差;由上述电脑服务终端7对数据处理结果,可以看到拟合曲线的r^2=0.99991≈1,即在0.001的置信水平下,该组数据的拟合可信,即该次测量重力加速度的符合该x
‑
t图像,且计算可得g值为9.75528,相对误差为:0.39%,较传统测量重力加速度的方法相比,本发明避免了实际位移x的测量不准,获得了相同实验环境的更多的数据点信息,较大的避免了数据点失真的情况,使数据处理时拟合相关性更高,精度更大。
[0049]
值得说明的是:在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0050]
对于本领域技术人员而言,显然本发明专利不限于上述示范性实施例的细节,而且在不背离本发明专利的精神或基本特征的情况下,能够以其他的具体形式实现本发明专利。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明专利的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的得同要件的含义和范围内的所有变化囊括在本发明专利内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。