1.本发明一种格构梁形变光纤实时传感监测系统,属于分布式光纤传感实时监测系统技术领域。
背景技术:
2.边坡防护与加固一直是我国治理滑坡和道路维护的一项重要问题,格构梁作为一种滑坡治理的有效措施,得到了广泛的应用。对于格构梁形变监测问题也一直是国内外研究的重点,但是现有的格构梁形变监测方案存在监测系统测量误差大,测量实时性不足,系统构造复杂且不稳定,维修检测困难,成本高等问题,给边坡防护工作带来了很大的困难。格构梁形变实时光纤传感监测系统基于分布式光纤传感技术,具有尺寸小、重量轻、耐腐蚀、抗辐射、抗电磁干扰、方便布设等特点。分布式光纤传感技术中的光频域反射技术具有高空间分辨率,高实时性,高精度等特点,但是受限于扫频激光源的性能,存在扫频激光非线性的问题,对传感信号造成较大的干扰,导致信噪比低,在实际的应用中也会因为传感光纤的不合理铺设造成测量精度的下降。
3.本发明针对目前的格构梁形变监测系统种种不足,提出了以光频域反射技术为核心,结合去斜滤波算法、双主干涉光回路、光强放大技术和光偏振态控制技术的格构梁形变实时光纤传感监测系统。
技术实现要素:
4.本发明为了克服现有技术中存在的不足,所要解决的技术问题为:提供一种格构梁形变光纤实时传感监测系统硬件结构的改进。
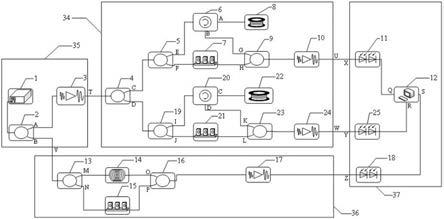
5.为了解决上述技术问题,本发明采用的技术方案为:一种格构梁形变光纤实时传感监测系统,包括线性扫频光源输出模块、双主干涉光回路传感模块、辅干涉非线性相位采集模块、数据采集处理模块;所述线性扫频光源输出模块的输出端t通过光纤连接至双主干涉光回路传感模块的输入端,线性扫频光源输出模块的输出端v通过光纤连接至辅干涉非线性相位采集模块的输入端;所述双主干涉光回路模块的输出端u通过光纤与数据采集处理模块的输入端x相连,双主干涉光回路模块的输出端w通过光纤与数据采集处理模块的输入端y相连;所述辅干涉非线性相位采集模块的输出端通过光纤与数据采集处理模块的输入端z相连。
6.所述双主干涉光回路传感模块包括第二光纤耦合器、第三光纤耦合器、第一光环形器、第一偏振控制器、横向传感光纤、第四光纤耦合器、第二可调光放大器、第七光纤耦合器、第二光环形器、第二偏振控制器、纵向光纤、第八光纤耦合器、第四可调光放大器,具体光路结构为:所述第二光纤耦合器的输出端c与第三光纤耦合器的输入端相连,第三光纤耦合
器的输出端e与第一光环形器的输入端相连,第一光环形器的输出端a与横向传感光纤相连,第一光环形器的输出端b与第四光纤耦合器的输入端g相连,第三光纤耦合器的输出端f与第一偏振控制器的输入端相连,第一偏振控制器的输出端与第四光纤耦合器的输入端h相连,第四光纤耦合器的输出端与第二光放大器的输入端相连,第二光放大器的输出端与第一光电探测器的输入端相连;第二光环形器的输出端d与第八光纤耦合器的输入端k相连,第八光纤耦合器的输出端与第四可调光放大器的输入端相连,第四可调光放大器的输出端与第三光电探测器的输入端相连,第七光纤耦合器的输出端j与第二偏振控制器的输入端相连,第二偏振控制器的输出端与第八光纤耦合器的输入端l相连,第二光纤耦合器的输出端d与第七光纤耦合器的输入端相连,第七光纤耦合器的输出端i与第二光环形器的输入端相连,第二光环形器的输出端c与纵向传感光纤相连,。
7.所述数据采集处理模块包括第一光电探测器、第二光电探测器、第三光电探测器和计算机,分别将双主干涉光回路模块的输出端u、输出端w、辅干涉非线性相位采集模块的输出端的三路光信号转换为电信号输入计算机,通过去斜滤波算法,分析计算机端口s采集的辅干涉信号,提取光路整个系统的非线性相位,并在提取系统的非线性相位之后对计算机端口q和端口r采集到的横向与纵向的拍频信号进行非线性相位补偿,随后完成解调,获取格构梁网络的形变信息。
8.所述线性扫频光源输出模块包括线性扫频激光源、第一光纤耦合器、第一可调光放大器,线性扫频激光源的输出端与第一光纤耦合器的输入端相连,第一光纤耦合器的输出端a与第一可调光放大器的输入端相连,第一可调光放大器的输出端与第二光纤耦合器的输入端相连,第一光纤耦合器的输出端b与第五光纤耦合器的输入端相连。
9.所述线性扫频光源输出模块的输出端t、输出端v的输出光功率比值为198:1。
10.所述第二光纤耦合器的输出端c、输出端d的分光比为50:50。
11.所述辅干涉非线性相位采集模块包括第五光纤耦合器、延迟光纤、第三偏振控制器、第六光纤耦合器、第三可调光放大器,具体光路结构为:所述第五光纤耦合器的输出端m经延迟光纤与第六光纤耦合器的输入端o相连,第六光纤耦合器的输出端与第三可调光放大器的输入端相连,第三可调光放大器的输出端与数据采集处理模块的输入端z相连,第五光纤耦合器的输出端n与第三偏振控制器的输入端相连,第三偏振控制器的输出端与第六光纤耦合器的输入端p相连。
12.本发明所采用的技术方案以光频域反射技术为核心,结合去斜滤波算法、双主干涉光回路、光强放大技术、光偏振态控制技术。与现有技术相比,本发明的有益效果如下。
13.一、现有的格构梁形变监测方案中,很难实现对易滑坡地段24小时实时监测,对于上百公里乃至上千公里的边坡防护缺乏有效监测。本发明基于分布式光纤传感技术,其显著特点就是适合于大范围,全天候,高实时性的形变监测,与现有格构梁形变监测方案相比成本较低,且空间分辨率高。
14.二、本发明设计双主干涉光回路,利用光强放大技术和光偏振态控制技术,结合去斜滤波器,提高了信号强度,补偿了传感光纤中拍频信号的非线性相位噪声,提高了信噪比,提高了对格构梁形变的敏感度。
15.三、本发明给出了传感光纤在格构梁梁体内部的铺设方案,解决了纵向与横向光
纤布置的空间矛盾性,具有很广的适用范围和可操作性。
附图说明
16.下面结合附图对本发明做进一步说明。
17.图1为本发明的光纤传感监测系统的结构示意图。
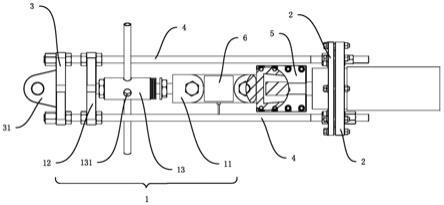
18.图2、图3为本发明提供的一种传感光纤在格构梁网络十字交叉部分光纤铺设的结构示意图。
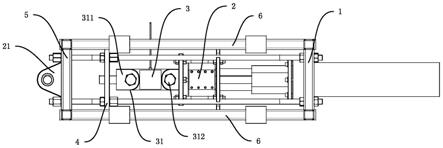
19.图4为本发明在格构梁网络边缘梁传感光纤铺设的结构示意图。
20.图5为本发明中传感光纤的结构示意图。
21.图中:1为线性扫频激光源、2为第一光纤耦合器、3为第一可调光放大器、4为第二光纤耦合器、5为第三光纤耦合器、6为第一光环形器、7为第一偏振控制器、8为横向传感光纤、9为第四光纤耦合器、10为第二可调光放大器、11为第一光电探测器、12为计算机、13为第五光纤耦合器、14为延迟光纤、15为第三偏振控制器、16为第六光纤耦合器、17为第三可调光放大器、18为第二光电探测器、19为第七光纤耦合器、20为第二光环形器、21为第二偏振控制器、22为纵向传感光纤、23为第八光纤耦合器、24为第四可调光放大器、25为第三光电探测器、26为第一光纤铺设通道、27为第二光纤铺设通道、28为第三光纤铺设通道、29为第四光纤铺设通道、30为格构梁混凝土材料、31为螺纹钢筋、32为光纤光芯、33为柔性包层、34为双主干涉回路传感模块、35为线性扫频光源输出模块、36为辅干涉非线性相位采集模块、37为数据采集处理模块。
具体实施方式
22.如图1至图5所示,本发明一种格构梁形变光纤实时传感监测系统,包括线性扫频光源输出模块35、双主干涉光回路传感模块34、辅干涉非线性相位采集模块36、数据采集处理模块37;双主干涉光回路传感模块34用以实现对格构梁纵向与横向应变分布信息的同时感知与数据传输;所述线性扫频光源输出模块35的输出端t通过光纤连接至双主干涉光回路传感模块34的输入端,线性扫频光源输出模块35的输出端v通过光纤连接至辅干涉非线性相位采集模块36的输入端;所述双主干涉光回路模块34的输出端u通过光纤与数据采集处理模块37的输入端x相连,双主干涉光回路模块34的输出端w通过光纤与数据采集处理模块37的输入端y相连;所述辅干涉非线性相位采集模块36的输出端通过光纤与数据采集处理模块37的输入端z相连。
23.所述双主干涉光回路传感模块34包括第二光纤耦合器4、第三光纤耦合器5、第一光环形器6、第一偏振控制器7、横向传感光纤8、第四光纤耦合器9、第二可调光放大器10、第七光纤耦合器19、第二光环形器20、第二偏振控制器21、纵向光纤22、第八光纤耦合器23、第四可调光放大器24,具体光路结构为:所述第二光纤耦合器4的输出端c与第三光纤耦合器5的输入端相连,第三光纤耦合器5的输出端e与第一光环形器6的输入端相连,第一光环形器6的输出端a与横向传感光纤8相连,第一光环形器6的输出端b与第四光纤耦合器9的输入端g相连,第三光纤耦合器5
的输出端f与第一偏振控制器7的输入端相连,第一偏振控制器7的输出端与第四光纤耦合器9的输入端h相连,第四光纤耦合器9的输出端与第二光放大器10的输入端相连,第二光放大器10的输出端与第一光电探测器11的输入端相连;第七光纤耦合器19的输出端j与第二偏振控制器21的输入端相连,第二偏振控制器21的输出端与第八光纤耦合器23的输入端l相连,第二光纤耦合器4的输出端d与第七光纤耦合器19的输入端相连,第七光纤耦合器19的输出端i与第二光环形器20的输入端相连,第二光环形器20的输出端c与纵向传感光纤22相连,第二光环形器20的输出端d与第八光纤耦合器23的输入端k相连,第八光纤耦合器23的输出端与第四可调光放大器24的输入端相连,第四可调光放大器24的输出端与第三光电探测器25的输入端相连。
24.所述数据采集处理模块37包括第一光电探测器11、第二光电探测器18、第三光电探测器25和计算机12,分别将双主干涉光回路模块34的输出端u、输出端w、辅干涉非线性相位采集模块36的输出端的三路光信号转换为电信号输入计算机12,通过去斜滤波算法,分析计算机12端口s采集的辅干涉信号,提取光路整个系统的非线性相位,并在提取系统的非线性相位之后对计算机12端口q和端口r采集到的横向与纵向的拍频信号进行非线性相位补偿,随后完成解调,获取格构梁网络的形变信息。
25.所述线性扫频光源输出模块35包括线性扫频激光源1、第一光纤耦合器2、第一可调光放大器3,线性扫频激光源1的输出端与第一光纤耦合器2的输入端相连,第一光纤耦合器2的输出端a与第一可调光放大器3的输入端相连,第一可调光放大器3的输出端与第二光纤耦合器4的输入端相连,第一光纤耦合器2的输出端b与第五光纤耦合器13的输入端相连。
26.所述线性扫频光源输出模块35的输出端t、输出端v的输出光功率比值为198:1。
27.所述第二光纤耦合器4的输出端c、输出端d的分光比为50:50。
28.所述辅干涉非线性相位采集模块36包括第五光纤耦合器13、延迟光纤14、第三偏振控制器15、第六光纤耦合器16、第三可调光放大器17,具体光路结构为:所述第五光纤耦合器13的输出端m经延迟光纤14与第六光纤耦合器16的输入端o相连,第六光纤耦合器16的输出端与第三可调光放大器17的输入端相连,第三可调光放大器17的输出端与数据采集处理模块37的输入端z相连,第五光纤耦合器13的输出端n与第三偏振控制器15的输入端相连,第三偏振控制器15的输出端与第六光纤耦合器16的输入端p相连。
29.本发明提供的基于光频域反射技术的格构梁形变实时光纤传感监测系统,包括线性扫频激光源1、第一光纤耦合器2、第一可调光放大器3、第二光纤耦合器4、第三光纤耦合器5、第一光环形器6、第一偏振控制器7、横向传感光纤8、第四光纤耦合器9、第二可调光放大器10、第一光电探测器11、计算机12、第五光纤耦合器13、延迟光纤14、第三偏振控制器15、第六光纤耦合器16、第三可调光放大器17、第二光电探测器18、第七光纤耦合器19、第二光环形器20、第二偏振控制器21、纵向传感光纤22、第八光纤耦合器23、第四可调光放大器24、第三光电探测器25;图1为本发明所述的一种格构梁形变光纤实时传感监测系统的结构示意图。
30.其中,线性扫频激光源1发出扫频范围为1548nm到1558nm的线性扫频激光,扫频激光进入第一光纤耦合器2输入端,第一光纤耦合器2将扫频激光分为两束,第一光纤耦合器2的输出端a输出光功率占比为99%的扫频光。第一光纤耦合器2的输出端b输出光功率占比为
1%的扫频光;第一光纤耦合器2的输出端a输出的扫频光随后通过第一可调光放大器3,其光功率被放大为原光功率的2倍,随后该扫频光进入第二耦合器4的输入端,被分为两路,光功率占比均为50%,一路从第二光纤耦合器4的输出端c输出到第三光纤耦合器5的输入端,另一路从第二光纤耦合器4的输出端d输出到第七光纤耦合器19的输入端;输入第三光纤耦合器5的扫频光被分为两束,其中第三光纤耦合器5的输出端e输出光功率占比为99%的扫频光,输出端f输出光功率占比为1%的扫频光;第三光纤耦合器5输出端e输出的扫频光进入第一光环形器6的输入端口,从第一光环形器6的a端口进入横向传感光纤8,横向传感光纤8返回的瑞利散射光从第一光环形器6的b端口输出,并通过第四光纤耦合器9的输入端g进入第四光纤耦合器9,第三光纤耦合器5的输出端f输出的扫频光通过第一偏振控制器7调整偏振态后,通过第四光纤耦合器9的输入端h进入第四光纤耦合器9,与从第四光纤耦合器9输入端g进入的瑞利散射光进行耦合;第四光纤耦合器9的输出端输出的耦合光通过第二可调光放大器10,进入第一光电探测器11完成拍频干涉,并被转换为电信号,输入计算机12的端口q完成分析处理。
31.其中输入第七光纤耦合器19的扫频光被分为两束,其中第七光纤耦合器19的输出端i输出光功率占比为99%的扫频光,输出端j输出光功率占比为1%的扫频光;第七光纤耦合器19输出端i输出的扫频光进入第二光环形器20的输入端口,从第二光环形器20的c端口进入纵向传感光纤22,纵向传感光纤22返回的瑞利散射光从第二光环形器20的输出端d输出,并通过第八光纤耦合器23的输入端k进入第八光纤耦合器23,第七光纤耦合器19的输出端j输出的扫频光通过第二偏振控制器21调整偏振态后,通过第八光纤耦合器23的输入端l进入第八光纤耦合器23与从第八光纤耦合器23的输入端k进入的瑞利散射光进行耦合;第八光纤耦合器23的输出端输出的耦合光通过第四可调光放大器24,进入第三光电探测器25完成拍频干涉,并被转换为电信号,输入计算机12的端口r完成分析处理。
32.第一光纤耦合器2输出端b输出的扫频光进入第五光纤耦合器13被分为两束,其中第五光纤耦合器13输出端m输出光功率占比为99%的扫频光经延迟光纤14进入第六光纤耦合器16的输入端o,第五光纤耦合器13输出端n输出光功率占比为1%的扫频光通过第三偏振控制器15调整偏振态后进入第六光纤耦合器16的输入端p与从第六光纤耦合器16输入端o进入的扫频光发生耦合,发生耦合后的扫频光进入第三可调光放大器17进行光功率放大,随后进入第二光电探测器18发生拍频干涉,并被转换为电信号,通过计算机12的端口s输入到计算机。
33.三路信号被输入计算机后,通过去斜滤波算法,分析计算机12端口s采集的辅干涉信号,提取光路整个系统的非线性相位。并在提取系统的非线性相位之后对计算机12端口q和端口r采集到的横向与纵向的拍频信号进行非线性相位补偿,随后完成解调,获取格构梁网络的形变信息。至此达到格构梁形变实时传感监测。
34.图2、图3为本发明在格构梁网络十字交叉部分光纤铺设结构图,图4为本发明在格构梁网络边缘处光纤铺设结构,包括横向传感光纤8、纵向传感光纤22、第一光纤铺设通道26、第二光纤铺设通道27、第三光纤铺设通道28、第四光纤铺设通道29、格构梁混凝土材料30、螺纹钢筋31。
35.具体铺设时,横向传感光纤8应铺设在第二光纤铺设通道27,纵向传感光纤22应铺设到第三光纤铺设通道28,光纤铺设通道内径应大于光纤外径,纵向传感光纤22与横向传
感光纤8置于各自通道内,其光纤与铺设通道间隙应使用聚氨酯材料进行填充,其余皆可按格构梁施工方案浇筑混凝土材料。
36.具体铺设时,纵向传感光纤22沿第三光纤铺设通道28铺设至格构梁边缘梁体时,若需进行转向,根据现场具体情况可将纵向传感光纤22进行弯折转入第一光纤铺设通道26。同理,横向传感光纤8根据现场需要也可在横梁、纵梁交汇处从第二光纤铺设通道27转入第四光纤铺设通道29。在格构梁梁体中,第一光纤铺设通道26与第三光纤铺设通道28处于同一高度,第二光纤铺设通道27与第四光纤铺设通道29处于另一高度,以便于传感光纤在梁体交汇处完成转向。避免了横向传感光纤8与纵向传感光纤22在梁体内的直接物理接触。纵向格构梁梁体中的第三光纤铺设通道28、第四光纤铺设通道29处于梁体内不同高度。横向格构梁梁体中的第一光纤铺设通道26、第二光纤铺设通道27处于梁体内不同高度。
37.图5为传感光纤的结构示意图,包括光纤光芯32、柔性包层33。
38.本发明主要特点在于以光频域反射技术为核心,结合去斜滤波算法、双主干涉光回路、光强放大技术,对格构梁实现24小时全天候不间断监测,实时获取格构梁发生的任意形变信息,以判断边坡的整体状态并实现预警,同时给出了施工过程中传感光纤的铺设方案。本发明给出了传感光纤在格构梁梁体内部的铺设方案,解决了纵向与横向光纤布置的空间矛盾性,具有很广的适用范围和可操作性。
39.关于本发明具体结构需要说明的是,本发明采用的各部件模块相互之间的连接关系是确定的、可实现的,除实施例中特殊说明的以外,其特定的连接关系可以带来相应的技术效果,并基于不依赖相应软件程序执行的前提下,解决本发明提出的技术问题,本发明中出现的部件、模块、具体元器件的型号、连接方式除具体说明的以外,均属于本领域技术人员在申请日前可以获取到的已公开专利、已公开的期刊论文、或公知常识等现有技术,无需赘述,使得本案提供的技术方案是清楚、完整、可实现的,并能根据该技术手段重现或获得相应的实体产品。
40.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。