用于调节技术系统的方法和调节装置
背景技术:
1.诸如机器人、风力涡轮机、燃气轮机、电动机、内燃机、制造设施或能量传输网络的复杂技术系统的控制大多基于大量控制回路,用于调节所述技术系统或其组件的动作。
2.规则大多旨在根据预给定标准优化所述技术系统的性能,例如其功率、其精度、其速度、其资源消耗、其污染物排放或它们的组合。
3.但是在许多情况下,这些标准可能在执行动作期间改变或依据运行状态改变。例如对于应当抓握小物体的机器人臂而言。只要机器人臂与物体之间的距离较大,就不必特别精确地调节所述机器人臂的运动轨迹。取而代之的是可以提高移动速度。一旦机器人臂靠近该物体并应当抓握它,该偏好就会更改。
4.当前通常配置调节器,使得所得到的调节方法在尽可能多的或所有的运行条件下满足相应的标准。在此,进行配置的调节参数或元参数通常由专家手动确定。然而,对于许多运行条件而言,所得到的调节参数通常不必要地保守。
5.此外还已知为了考虑变化的调节标准使用不同的调节参数组。但是,确定这种调节参数组通常需要高的耗费。此外,调节参数的变化通常与严格的规定有关,因此不是很灵活。
技术实现要素:
6.本发明的任务是说明用于调节技术系统的方法和调节装置,所述方法和所述调节装置可以更好地适配于不同的运行条件。
7.该任务通过具有专利权利要求1的特征的方法,通过具有专利权利要求9的特征的调节装置,通过具有专利权利要求10的特征的计算机程序产品以及通过具有专利权利要求11的特征的计算机可读存储介质来解决。
8.为了调节技术系统,检测所述技术系统的状态数据并馈送到调节器中,所述调节器的调节方法可以通过调节参数加以配置。所述调节参数在此特别地也可以是参数空间中的多维参数向量。通过所述调节器根据所述状态数据在第一控制回路中按照所述调节方法调节所述技术系统。此外,检测量化所述调节器的当前计算耗费的耗费数据并传送给调节计划器。所述调节计划器根据所述耗费数据来确定更新的调节参数,按照预给定的性能度量,所述调节方法通过所述更新的调节参数比通过先前的调节参数当前性能更好。这种性能度量特别是可以涉及所述调节器和/或所述技术系统的性能,例如调节精度、调节速度、执行精度、执行速度和/或它们的加权组合。然后通过所述更新的调节参数重新配置所述调节器。
9.为了执行根据本发明的方法,设置调节装置、计算机程序产品和计算机可读的、优选非易失性的存储介质。
10.例如,可以借助于一个或多个计算机、处理器、专用集成电路(asic)、数字信号处理器(dsp)和/或所谓的“现场可编程门阵列”(fpga)来执行或实现根据本发明的方法以及根据本发明的调节装置。
11.本发明的优点特别是在于,所述调节在许多情况下可以通过自动地重新配置所述调节器而以优化的或至少有利的方式对运行条件的变化做出反应。特别地,根据本发明的调节可以有利地考虑所述调节器不断变化的计算耗费。从而更精确的调节通常决定了所述调节器的更多计算耗费。在这样的情况下,例如在将调节精度与在当前高计算负荷情况下的动作的执行速度进行优化协调时,所述调节精度可以临时占用提高的优化成本。可以观察到,本发明可以特别有利地应用于需要相对高计算耗费的调节器,例如应用于模型预测调节器或mpc调节器(mpc:model predictive control,模型预测控制)。
12.在从属权利要求中说明了本发明的有利的实施形式和扩展。
13.根据本发明的有利实施方式,作为耗费数据可以检测所述调节器的处理器负荷、温度、资源利用、程序运行时间和/或时间需求。上述耗费数据量化了所述调节器的当前计算耗费,并且通常可以通过简单的方式加以测量或以其他方式检测。此外,作为耗费数据也可以检测取决于所述调节器的计算耗费或由此引起的其他变量。优选地,可以检测与所述调节器的硬件有关的耗费数据。
14.根据本发明的另一有利实施方式,可以在第二控制回路中检测所述耗费数据、确定所述更新的调节参数以及重新配置所述调节器。通过这种方式,所述调节方法可以自动地与所述调节器的当前计算负荷动态地适配。
15.此外,也可以将所述技术系统的状态数据传送到所述调节计划器,并且可以根据这些状态数据确定所述更新的调节参数。通过额外考虑当前状态数据,调节参数在许多情况下可以更好地与所述技术系统的当前运行状态适配。
16.根据本发明的另一有利实施方式,通过所述调节计划器可以确定包括第一调节参数的参数范围,使得分别通过所述第一调节参数配置的调节方法具有按照所述性能度量比分别通过其他调节参数配置的调节方法更好的性能。所述参数范围特别是可以理解为所述调节参数的参数空间的范围或者一般性地理解为所述调节参数的参数空间的子集。第一调节参数向所述参数范围的分配例如可以基于分别得到的性能度量的比较来进行。
17.在确定了所述参数范围之后,通常可以将对所述更新的调节参数的搜索限制于所确定的参数范围。因此,所述参数范围可以有利地通过所述调节计划器预先确定,以便在搜索所述更新的调节参数方面已经预先排除次优的调节参数。
18.优选地,可以针对相应的调节参数确定与所得到的性能有关的不同性能变量。特别地,可以特定于所述技术系统的不同状态和/或特定于所述调节器的不同计算负荷来确定所述性能变量。然后可以向所述参数范围分配以下调节参数,对于这些调节参数而言,一个性能变量基本上不能在在此不恶化另一性能变量的情况下得到改善。不能满足上述条件的调节参数对应地从所述参数范围中排除。
19.作为参数范围优选确定特别是在所述性能变量和/或所述性能度量方面的帕累托集合。这样的帕累托集合通常也被称为帕累托前沿。帕累托集合的元素满足上述条件,只要一个相应的目标特性不能在在此不恶化另一目标特性的情况下得到改善。大量优化方法可用于确定帕累托集合。
20.在确定了所述参数范围之后,可以根据所述状态数据和/或所述耗费数据从所述参数范围中选择所述更新的调节参数。只要在很多情况下相对于整个参数空间可以强烈限制所述参数范围,确定所述更新的调节参数所需的耗费通常就会显著减少。因此,在许多情
况下可以在所述调节器正在运行时确定所述更新的调节参数以及重新配置所述调节器。
21.根据本发明的另一有利实施方式,所述调节器可以随时间外推状态数据并且根据随时间外推的状态数据来调节所述技术系统。为了随时间外推,所述调节器可以使用过程模型,所述过程模型对所述技术系统或其组件之一在预给定的时间范围内的时间行为进行建模。特别地,可以将模型预测调节器或mpc调节器用于这种基于预测的调节。
附图说明
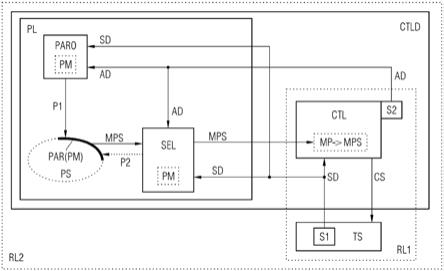
22.下面基于附图更详细地解释本发明的实施例。在此分别以示意图示出了:图1:在调节技术系统时的根据本发明的调节装置,以及图2:根据本发明的调节装置的更详细图示。
具体实施方式
23.图1示意性地示出了在调节技术系统ts时的根据本发明的调节装置ctld。作为技术系统ts,例如可以调节机器人、风力涡轮机、燃气轮机、电动机、内燃机、制造设施、能量传输网络或其他机器、其他设备或其他设施。技术系统ts特别地也可以是技术系统的组件或其他部分,或是仿真的技术系统或技术系统的仿真组件。
24.对于本实施例,假定技术系统ts是机器人,并且调节装置ctld示例性地调节机器人臂的运动。
25.调节装置ctld具有用于执行根据本发明的方法的处理器和用于存储要处理的数据的存储器。调节装置ctld在图1中示出在技术系统ts的外部。替代地,调节装置ctld也可以完全或部分地集成到技术系统ts中。
26.技术系统ts具有带有一个或多个过程传感器的第一传感器系统s1,所述过程传感器用于检测或测量技术系统ts的状态数据sd。
27.状态数据sd量化技术系统ts的运行状态、在技术系统ts那里运行的过程或与技术系统ts的运行相关的其他变量。状态数据sd可以包括例如位置数据、运动数据、过程数据或物理数据,如技术系统ts或其组件的温度、压力、力耗费、力施加、转矩、电流、电压和/或功率。作为状态数据sd特别是可以检测与技术系统ts的要在运行中优化的目标变量有关的数据,例如资源消耗、振动或动作精度。此外,状态数据sd也可以包括由第一传感器系统s1的相机或其他光学传感器检测的光学数据。此外,作为状态数据sd还可以检测与技术系统ts的运行相关的其他影响因素,如特别是关于技术系统ts的环境的数据。
28.通过第一传感器系统s1连续检测当前状态数据sd,特别是在执行技术系统的经过调节的动作时,例如在机器人臂运动期间。当前检测的状态数据sd(其例如可能涉及所述机器人臂的当前位置)作为调节变量馈入到调节装置ctld的调节器ctl中,所述调节器根据所述调节变量产生用于技术系统ts的调节信号cs。为了调节技术系统ts,将产生的调节信号cs输出到所述技术系统。调节信号cs可以例如操控所述机器人臂的电动机。
29.当前状态数据sd的检测及其向调节器ctl的输送、调节信号cs的产生以及通过调节信号cs对技术系统ts的操控形成了闭合的第一控制回路rl1。例如可以将所述第一控制回路实现为模型预测调节的控制回路。这样的模型预测调节使用过程模型来对技术系统在预给定时间范围内的行为进行建模和时间外推。然后可以根据外推出的行为以预测的方式
调节所述技术系统。
30.调节器ctl执行可以通过至少一个调节参数mp配置的调节方法。这样的调节参数通常也被称为元参数,并且优选地表示为参数空间中的多维参数向量。通过调节参数mp,可以调节或配置例如模型预测调节器的采样率、数值积分方法的类型或精度、数值近似的类型或精度、要用于优化的hesse矩阵的大小或精度、一个或多个过程参数、优化方法的起始值或公差和/或传感器的类型或噪声特性。在此,调节参数mp在许多情况下影响调节器ctl的由调节引起的计算耗费。
31.根据本发明,调节装置ctld或调节器ctl包括第二传感器系统s2,用于连续检测或测量当前耗费数据ad,所述当前耗费数据量化调节器ctl的当前的、特别是由调节引起的计算耗费。
32.耗费数据ad可以特别是量化处理器负荷、温度、资源利用、程序运行时间、时间需求、电流消耗和/或与调节器ctl的硬件有关的其他耗费变量。
33.第二传感器系统s2优选地耦合至调节器ctl的硬件,并且可以例如包括布置在调节器ctl的处理器处的温度传感器。替代地或附加地,所述第二传感器系统可以检测调节器ctl上的当前处理器负荷,或从操作系统中调用所述当前处理器负荷。
34.将当前耗费数据ad和当前状态数据sd从第二传感器系统s2传送到调节计划器pl。调节计划器pl用于确定用于配置调节器ctl的优化调节参数。调节计划器pl按照性能度量pm优化所述调节参数,性能度量pm量化了调节器ctl或其调节方法的性能和/或技术系统ts的性能。因此,性能度量pm是要通过调节计划器在优化方法的范围内优化的目标变量。
35.性能度量pm可以例如量化调节精度、调节速度、反应速度、执行精度、执行速度和/或上述变量的加权组合。特别地,性能度量pm还可以涉及技术系统ts的性能,例如能量生产、能量消耗、振动、污染物排放和/或要执行的动作的精度。
36.通过调节计划器pl根据当前耗费数据ad和当前状态数据sd确定更新的调节参数mps,该更新的调节参数mps导致优化的或特别高的性能度量pm。在该优化的情况下,通过调节计划器pl优选地使用调节器ctl的模型,通过该模型使得调节器ctl的计算耗费与调节器ctl或技术系统ts的性能以及与技术系统ts的状态有关。通过这种方式,更新的调节参数mps可以基于当前状态数据sd与技术系统ts的当前运行状态适配,并且基于当前耗费数据ad与调节器ctl的当前计算负荷适配。
37.大量进行优化的计划程序可用于实现调节计划器pl。利用所述进行优化的计划程序,计划任务可以例如借助于合适的描述语言(如pddl(planning domain definition language,计划域定义语言)或owl(web ontology language,网络本体语言))以机器可读的方式表达和自动处理。从性能度量出发,这样的计划器可以使用已知的优化方法来确定性能优化的调节参数。
38.将更新的调节参数mps从调节计划器pl传送到调节器ctl。通过更新的调节参数mps重新配置调节器ctl,并且所述调节方法以及因此第一控制回路rl1以优化的方式与技术系统ts的当前运行状态以及与调节器ctl的当前计算负荷适配。
39.通过检测当前状态数据sd和耗费数据ad,将它们输送到调节计划器pl,确定更新的调节参数mps以及重新配置调节器ctl,在运行正在进行期间第二控制回路rl2闭合。
40.图2示出了根据本发明的调节装置ctld,其具有调节计划器pl的更详细的图示。
41.只要在图2中使用与图1中相同或对应的附图标记,这些附图标记就表示相同或对应的实体,这些实体特别是可以如上所述地实现或设计。
42.如上已经讲述的,通过调节参数mp配置的调节器ctl根据当前测量的状态数据sd,通过在第一控制回路rl1中输出调节信号cs来调节技术系统ts。
43.如上进一步讲述的,将当前状态数据sd以及由第二传感器系统s2测量的当前耗费数据ad传送到调节计划器pl,调节计划器pl根据当前状态数据sd和当前耗费数据ad来确定更新的调节参数mps。
44.为此目的,调节计划器pl使用调节器模型来预测调节器ctl在可预给定的预测范围内依赖于调节参数的计算耗费。为此可以使用大量有效的调节器模型。这样的调节器模型可以特别是对在调节精度和/或调节速度改变时调节器ctl的计算耗费如何表现进行建模、说明和/或量化。通常,所述计算耗费随着所述调节精度和/或所述调节速度提高而也增加。借助于所述调节器模型确定更新的调节参数mps,使得用更新的调节参数mps配置的调节方法在相应当前状况下提高其通过性能度量pm量化的性能。
45.例如,在调节器ctl的当前计算负荷高时,可以暂时降低调节器ctl的调节精度,以取而代之地提高技术系统ts的动作的执行速度并从而提高性能。
46.所述调节器模型包括关于调节器ctl或技术系统ts的性能或状态变化与调节器ctl的分别所需的计算耗费之间的相互关系或依赖性的过程知识,或者可以说对所述过程知识建模。
47.相对地,可以将用作确定更新的调节参数mps的标准的状态数据sd和耗费数据ad理解为关于技术系统ts或调节器ctl的说明性知识。
48.为了在根据本发明的方法的第一阶段p1中进行预先计算,调节计划器pl包括帕累托优化器paro。通过帕累托优化器paro,借助于所述调节器模型基于性能度量pm预先确定所谓的帕累托集合par。帕累托集合par是包括可能的调节参数的参数空间ps的子集。
49.这样的帕累托集合包括参数空间的以下参数,对于这些参数而言,一个性能变量(例如调节精度)不能在在此不恶化另一性能变量(例如计算耗费)的情况下得到改善。帕累托集合通常也称为帕累托前沿。
50.然后,包含在帕累托集合par中的调节参数通常导致比参数空间ps的其他调节参数更好的性能或至少导致不恶化的性能。通过这种方式,可以预先(即,这里在第一阶段p1中)已经排除次优的调节参数或至少不导致改善的调节参数。多种已知的方法可用于确定帕累托集合par。
51.如果所述调节参数是参数空间ps中的多维参数向量,则帕累托集合par可以是参数空间ps的超面或其他选定的子集。在许多情况下,相对于整个参数空间ps,帕累托集合par十分有限。
52.在本实施例中,根据状态数据sd和耗费数据ad确定帕累托集合par,为此目的将状态数据sd和耗费数据ad传送到帕累托优化器paro。通过考虑状态数据sd和耗费数据ad,帕累托集合par可以更好地与技术系统ts的运行状况和/或与调节器ctl的计算能力适配。在正常调节运行(以下也称为第二阶段p2)期间,借助于调节计划器pl的选择模块sel从在第一阶段p1中确定的帕累托集合par中选择优化性能的更新的调节参数mps。为此目的,将当前状态数据sd和当前耗费数据ad传送到选择模块sel。
53.选择模块sel根据当前状态数据sd和当前耗费数据ad选择更新的调节参数mps,通过该更新的调节参数mps,性能度量pm在当前(通过状态数据sd和耗费数据ad)指定的状况下得到优化或至少近似于最优。有利地,从帕累托集合par中选择以下调节参数作为更新的调节参数mps,所述调节参数在当前状况下导致在调节性能、调节稳定性和调节计算耗费之间的最佳折衷,所述最佳折衷由性能度量pm量化。特别地,可以从帕累托集合par中选择导致最高性能度量pm的调节参数作为更新的调节参数mps。
54.所述选择特别是借助于针对调节器ctl的计算耗费的预测模型以及借助于针对技术系统ts的行为的过程模型来进行。基于当前状态数据sd,更新的参数mps的选择可以与技术系统的当前运行状态适配,并且基于当前耗费数据ad与调节器ctl的当前计算负荷适配。
55.将由选择模块sel确定的更新的参数mps从选择模块sel传送到调节器ctl,以便如上所述在运行正在进行时在第二控制回路rl2中重新配置调节器ctl。
56.由于与整个参数空间ps相比,帕累托集合par通常非常有限,因此显著减少了在第二阶段p2中选择优化的调节参数mps所需的耗费。因此在许多情况下,更新的调节参数mps的选择以及调节器ctl的重新配置可以在运行正在进行时以及实时地进行。
57.因此,所述调节方法可以以自动和优化的方式动态地与调节器ctl的计算负荷的变化、与运行状况的变化和/或与性能规定的变化适配。调节参数的这种动态适配允许在许多情况下在比最初配置调节装置ctld更多的运行条件下使用调节装置ctld。因此,通常可以在较大干扰之后更快地稳定技术系统并且可以避免意外关闭。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。