1.本发明涉及面向特殊群体的可穿戴康复系统领域,并特别涉及一种面向脑瘫患者肢体康复的被动式训练感知系统。
背景技术:
2.在我国每1000活产儿中就有2.0~3.5个脑瘫患病,相对于我国庞大的人口总量,每年出现脑瘫的人数是非常惊人的。在脑瘫患者中,痉挛性脑瘫发病率最高,大约占全部病人的60%~70%,其主要表现为中枢性运动障碍及其姿势异常,是当今儿童致残的主要疾病之一。脑瘫虽为非进行性疾病,但带来的运动障碍却长久存在,因此有大量现存患儿,而且每年都有新的患儿产生,给其本人、家庭和社会带来沉重负担。传统针对脑瘫患者的康复治疗技术,因脑瘫治疗是一个长期的过程,接收传统医疗需要耗费巨大的精力、物力。同时治疗方法主要依赖专业的医生和专业的训练器材,无法与学校和社区的教育康复衔接在一起,造成负责脑瘫患者教育的学校和社区无从下手。
3.要解决传统治疗技术的难题,首先需要摆脱对专业医生和器材的依赖,让学校和社区甚至于一个家庭都能自助的实施康复治疗方案,同时要对训练效果做到精确和统一的把控,具有较强的抗环境因素干扰的能力。对运动障碍的脑瘫患儿实现康复治疗训练前需要真实地诊断出脑瘫患儿运动能力的具体情况,同时参考《中国脑性瘫痪康复指南》中的诊断标准和康复治疗方法,结合目前临床中经常使用的训练模式,制定出康复治疗方案。
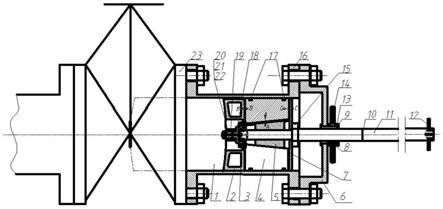
4.针对脑瘫患者康复训练的现有技术包括康复训练器材、康复训练方法以及康复训练系统。现有的康复训练器材类主要结构如图1所示,其原理是通过器材的支撑力和器材的结构帮助患者完成行走、站立、抓握等训练动作;康复训练方法主要是根据脑瘫患者的特点制定的一套针对性的康复训练的方法;康复训练的系统主要是软件系统和软件运行的平台以及训练系统需要的传感器。其原理是根据传感器采集的数据分析计算出患者的训练情况和状态并反馈给使用者,以此完成康复训练。
5.但是上述康复训练器材往往较为笨重且占用空间较大,使用时因为训练器材的特性,约束很大,只能完成单一的康复训练任务;现有的康复训练方法只能依赖有经验的康复训练师来把控科学性和准确性,对康复训练效果不能做到精确和统一的把控;现有的康复训练系统则大多数只是单一训练功能的训练系统,比如基于单一语音语义的训练系统、单一表情训练系统等。目前仅有基于kinect传感器的肢体运动康复训练系统采用肢体运动感知的训练方案,但该系统基于视频动作识别患者肢体动作,此实现方式易于受环境因素干扰影响,动作识别不够精确。目前仍缺乏一套普适性的被动训练系统,来提供精准化的训练控制。
技术实现要素:
6.针对已有面向脑瘫康复系统存在的康复训练效果单一、尚无统一的训练标准、系统识别训练动作受环境因素干扰较大不够精确等问题,同时传统医疗技术过于依赖专业的
医生、治疗费用高的痛点问题,本发明实现了一种面向脑瘫患者肢体康复的被动式训练感知系统,包括:采集模块、显示模块和处理模块;
7.该显示模块,用于向患者展示包含卡通人物的训练任务;
8.该采集模块,用于获取患者执行该训练任务时的肢体运动信息和肌电信息,并将该运动信息和该肌电信息传输至该处理模块;
9.该处理模块,用于根据该运动信息构建患者的肢体运动模型,且该肢体运动模型与该卡通人物的行为联动,根据该肌电信息,得到患者肌肉的力度状态,结合该肢体运动模型和该力度状态,得到患者执行该训练任务的完成度,并根据该完成度对该训练任务的时长和难度进行动态调整。
10.所述的面向脑瘫患者肢体康复的被动式训练感知系统,其中该行为联动包括:通过实时生成使用者的该肢体运动模型,通过该该肢体运动模型实时带该卡通人物来反馈给患者任务完成情况。
11.所述的面向脑瘫患者肢体康复的被动式训练感知系统,其中该采集模块包括运动传感器和肌电传感器,该运动传感器穿戴于患者的四肢、腰部和头部,且该运动传感器采集加速度、角速度、磁力计、角度和四元数,该肌电传感器佩戴于特定肌肉处,用以检测患者的肌肉活动情况。
12.所述的面向脑瘫患者肢体康复的被动式训练感知系统,其中该训练任务包括转头训练、仰卧起坐、俯卧抬头、翻身训练、爬行训练、爬姿训练、坐位训练、立位训练和行走训练;
13.转头训练:患者左右转头,以控制该该卡通人物左右转头完成指定动作;
14.仰卧起坐:患者仰卧起坐,以控制该卡通人物仰卧起坐完成指定动作;
15.俯卧抬头:患者在俯卧位抬头并把头恢复到俯卧低头状态,以控制该卡通人物抬头和低头完成指定动作;
16.翻身训练:患者翻身,以控制该卡通人物翻身完成指定动作;
17.爬行训练:患者往前爬行,以控制该卡通人物往前爬行完成指定动作;
18.爬姿训练:患者维持特定爬姿,以控制该卡通人物维持爬姿,患者摔倒,该卡通人物亦摔倒;
19.坐位训练:患者保持坐姿状态,以控制该卡通人物维持特定动作,患者晃动,该卡通人物亦晃动,患者摔倒,该卡通人物亦摔倒;
20.立位训练:患者保持站姿状态,以控制该卡通人物维持特定动作,患者晃动,该卡通人物亦晃动,患者摔倒,该卡通人物亦摔倒;
21.行走训练:患者往前行走一步,该卡通人物前行走一步,直到该卡通人物达到终点。
22.所述的面向脑瘫患者肢体康复的被动式训练感知系统,其中该处理模块根据该肢体运动信息,检测患者头部腰部的旋转角度,具体包括:获取角度旋转的标志位以及当前位于腰部或头部的运动传感器测得的角度值,将该角度值和该标志位做差,得到角度差值,根据角度差值的绝对值除以360取余,得到偏差值,判断该偏差值是否大于180,若是则用360减去该偏差值得到实际的该旋转角度,否则取该偏差值作为实际的该旋转角度;并结合该角度差值的正负,得到带有旋转方向信息的该旋转角度。
23.所述的面向脑瘫患者肢体康复的被动式训练感知系统,其中该处理模块根据该肢体运动信息,定位患者的四肢抬起,具体包括:通过佩戴于患者四肢的运动传感器测得的四元数,计算设备姿态欧拉角的roll角,以得到患者四肢的实时精确角度。
24.所述的面向脑瘫患者肢体康复的被动式训练感知系统,其中该处理模块根据佩戴于患者四肢的运动传感器采集的三轴角速度方差,检测患者是否发生晃动。
25.所述的面向脑瘫患者肢体康复的被动式训练感知系统,其中该处理模块根据佩戴于患者手臂的运动传感器采集的重力加速度值,计算重力方向在z轴和x轴之间的变化弧度,以得到患者手臂的旋转角度。
26.所述的面向脑瘫患者肢体康复的被动式训练感知系统,其中该处理模块包括:通过融合患者在训练过程中的肌电信息、运动信息和训练任务的完成度,得到包含各分项运动能力的评分的多维度量化评估值,并根据该多维度量化评估值,按照各训练任务针对性提升的分项运动能力设计调整权重,结合训练任务的完成度,对各项训练任务的时长和难度进行动态调整。
27.本发明还提出了一种客户端,用于上述面向脑瘫患者肢体康复的被动式训练感知系统,且该客户端为手机应用app或电脑应用软件。
28.由以上方案可知,本发明的优点在于:
29.本发明通过穿戴于四肢、腰部、头部的九轴运动传感器和肌电传感器,获取的脑瘫患者肢体运动行为与生理特征。运动传传感器以及肌电传感器通过wifi的通信方式实时传递患者运动信息,使得系统可以实时精确识别患者运动状况,监测肢体训练的全过程。本发明具有覆盖了运动功能的多方面因素的训练任务,使得本系统具有训练患者多维度运动的能力。
30.本系统操作简单,同时具有基于卡通形象设计制作的系统操作界面,使得用户清晰明了的了解使用本系统,完成训练任务。系统核心app可运行在安卓手机、安卓pad上,如今,安卓设备(手机、pad)和路由器的价格非常低廉,有相当多的家庭已经拥有了路由器和安卓设备,在已经拥有路由器和安卓设备的患者家庭中只需要购买可穿戴运动传感器和肌电传感器,就可以部署一套本训练系统,具有较低的部署成本。
附图说明
31.图1为现有康复训练器的示意图;
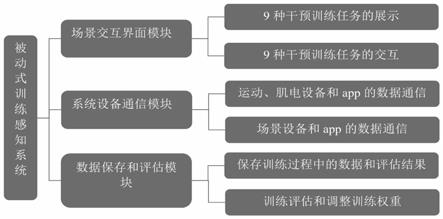
32.图2为系统功能概况图;
33.图3训练任务实现流程图;
34.图4为转头训练的显示内容示意图;
35.图5为仰卧起坐的显示内容示意图;
36.图6为俯卧抬头的显示内容示意图;
37.图7为翻身训练的显示内容示意图;
38.图8为爬行训练的显示内容示意图;
39.图9为爬姿训练的显示内容示意图;
40.图10为坐位训练的显示内容示意图;
41.图11为立位训练的显示内容示意图;
42.图12为行走训练的显示内容示意图。
具体实施方式
43.本系统是一种多元感知与交互融合的训练系统,本训练系统包括4个组成单元:感知单元、训练单元、通信单元和算法单元。
44.1、感知单元:包括运动传感器和肌电传感器,通过穿戴于患者的四肢、腰部、头部固定位置的运动传感器姿态构建脑瘫患者肢体运动模型,基于此模型可有效的精确识别患者的肢体动作,用于感知脑瘫患儿在训练过程中的粗大和精细肢体动作捕获;通过穿戴于训练需要活动的肌肉处的肌电传感器实时捕捉患者肢体活动动作的力度状态,结合患者的肢体运动模型同时在康复训练中监测肢体训练的全过程。
45.2、训练单元:本发明中有9个覆盖了运动功能的多方面因素的训练任务,分别是:1)转头训练,2)仰卧起坐,3)俯卧抬头,4)翻身训练,5)爬行训练,6)爬姿训练,7)坐位训练,8)立位训练,9)行走训练。这些任务构成了本系统对脑瘫患的者多维度运动能力训练。
46.转头训练:用户左右转头到一定角度后,触发阈值,表示一次转头任务的完成。
47.仰卧起坐:用户完成仰卧起坐动作,通过腰部传感器监测上身躯体的角度进行判断,从躺平到仰卧起坐到再次躺平为一个完整动作。
48.俯卧抬头:用户在俯卧位(趴)情况下,抬头并把头恢复到俯卧低头状态的周期过程,通过头部传感器进行角度判断。
49.翻身训练:用户在平躺姿势下转动身体180度,通过腰部传感器进行识别。
50.爬行训练:用户通过四肢协同向前爬行,通过四肢的运动传感器进行识别。
51.爬姿训练:用户保持后背拱起、四肢着地的静态爬行姿态,并保持一定的时间,通过全部传感器进行识别。
52.坐位训练:用户保持坐姿状态,通过腰部传感器识别坐姿状态,以保持一定的时间。
53.立位训练:用户保持站立姿态,并保持一定时间,通过腰部传感器识别状态。
54.行走训练:用户进行正常行走,基于脚步传感器进行计步。
55.3、通信单元:用于可穿戴感知设备与平板电脑间通信,可采用wi
‑
fi的通信方式,支持数据交换。
56.4、算法单元:将训练场景下的感知数据汇聚至算法单元,通过基于阈值判断和机器学习模型的训练效果评估和训练任务推荐。具体是基于运动传感器、肌电传感器所反映出的运动特征得到各分项运动能力的评分,最终形成对儿童运动能力的多维度量化评估。在此基础上,按照各训练任务针对性提升的分项运动能力设计调整权重,结合训练任务自身的完成分数,对各项训练时长和难度动态调整,即可得到适用于儿童的个性化训练方案。该算法单元可还包括专家单元:用于医学专家进行临床诊断结果的输入,在制定适用于儿童的个性化训练方案中,结合训练任务自身的完成分数的同时融合专家知识,使得制定的个性化训练方案更加科学的适用于患者的训练康复。
57.为了解决上述康复训练技术的弊端,本发明构建了面向脑瘫患者肢体康复的被动式训练感知系统,主要包括:1、定制化的覆盖多维度运动能力的训练任务;2、精准的运动感知功能。其中,“被动”指的是患者可以由家长或指导老师帮助训练,患者是被动式的被训
练。
58.1.定制化的覆盖多维度运动能力的训练任务。
59.通过实际调研现今脑瘫患者的康复训练需求,总结出九种肢体运动训练,分别是:转头训练、仰卧起坐、俯卧抬头、翻身训练、爬行训练、爬姿训练、坐位训练、立位训练、行走训练。这九种肢体运动训练需要每天多次不间断的练习,这个过程是相对比较枯燥的,患者在使用过程中容易产生懈怠的心理。为了增加训练过程中的趣味性,训练任务以卡通化的界面形式展现给患者,同时给每个训练任务赋予故事性,让患者在使用过程中感觉不是因为训练而训练,以完成游戏的剧情来引导患者完成训练,所以把九种训练任务转换成游戏场景是本发明发明的一个亮点、难点。
60.2.精准的运动感知功能。
61.人体的基本运动形态有头部(抬头、低头、左转、右转)运动;胳膊(肩部、肘关节)运动;手部(手腕处)运动,手指(指关节处)运动;腿部(腿根部、膝关节处)运动;脚部(脚腕处、脚趾关节)运动等。为了使系统对这些运动能力具有精准的运动感知功能,本发明在系统构建了脑瘫患者的肢体运动模型,把患者实际的肢体运动状态关联到构建的肢体运动模型中,通过判断患者肢体运动模型的运动状态来让系统具有精准的运动感知功能。实现这一功能又带来了另一个技术难点,怎么把患者的实际肢体运动状态关联到构建的肢体运动模型中。要解决这个问题,系统要具备检测患者全身肢体动作的能力、实时的患者实际肢体运动反馈的能力、以及具有较强的抗环境干扰能力。在实际训练过程中,不能因为各式各样的环境问题让系统错误的识别患者的实际运动状态。
62.2.1检测患者全身肢体动作的能力:结合实际的九种训练任务和人体的基本运动形态,认为训练系统只需要获取腿在腿根处的运动、胳膊在肩部的运动、头部腰部的运动状态就可以满足训练需要。
63.2.2实时的患者实际肢体运动反馈:患者训练过程中的肢体动作是连续的,为了实现肢体动作的实时感知,就需要系统实现肢体运动数据的实时接收并基于肢体运动模型实现动作捕捉。训练需要的六个肢体运动传感器和肌电传感器的数据需要同时传输,目前主流的小范围无线通信主要是wi
‑
fi和蓝牙,蓝牙的传输信号弱,容易受环境干扰,同时这么多的设备数据的快速传输也是对蓝牙设备的极大考验。本发明采用信号抗干扰较强、对多终端支持较好的wi
‑
fi设备传输信号,肢体运动感知设备和肌电感知设备分别以10
‑
30hz的频率将数据发送给系统。
64.2.3具有较强的抗环境干扰能力:在训练过程中患者的身体姿态有躺着、站着、坐着、侧卧、俯卧、仰卧等,在这些姿态中都要精准的识别四肢、头部、腰部的动作。本发明通过运动感知和肌电感知融合的方式实现检测的精准性和较强的抗环境干扰能力。运动感知和肌电感知融合是将运动感知数据和肌电感知数据采集到的构成一个长的特征向量,具体来说:运动感知数据序列为m={
…
},肌电感知数据序列为e={
…
},融合后为{m,e}。
65.为让本发明的上述特征和效果能阐述的更明确易懂,下文特举实施例,并配合说明书附图作详细说明如下。
66.1.构建肢体运动模型
67.1.1传感器安装
68.系统共有六个九轴运动传感器和一个戴在习惯手上的肌电传感器,六个肢体运动
传感器分别佩戴在左右手手腕、左右脚脚腕、头部额头、腰部的位置,用来检测患者的肢体运动情况。肌电传感器佩戴于训练需要活动的肌肉处,用来检测患者的肌肉活动情况。
69.1.2传感器数据构成
70.九轴运动传感器采集传感器的加速度、角速度、磁力计、角度、四元数等姿态信息。肌电传感器采集传感其所在位置的肌肉活动强度的信息。
71.1.3肢体运动模型的构建算法
72.患者穿戴好运动传感器双手自然下垂、目视前方的站立,此时穿戴于肢体的运动传感器姿态是固定不变的,假如右手手臂从自然下垂的状态抬起,穿戴于右手手腕处的运动传感器跟着手臂的抬起发生姿态的变化,进而精确的判断出手臂的抬起角度,得到肢体模型的运动轨迹。通过全身六个运动传感器即可得到全身的肢体运动信息,构建出肢体运动的模型。
73.1.3.1头部腰部水平旋转
74.计算头部腰部水平转动的角度,首先要解决的问题是运动传感器实际姿态角度转化为头部腰部实际转动角度的问题,在水平空间角度中,使用者可以在水平360度任意角度为初始角度,运动传感器的姿态角为相对于地磁传感器的绝对角度,如果使用者的初始角度是运动传感器的水平姿态359度,此时患者实际顺时针转动2度,传感器的水平姿态角因为超过了角度极值360度,测量角度变为1度,单单依靠差值计算得到的是超过300度的角度值,但是患者实际转动的是2度。根据人体特点,人体在保持站立的姿态不变的情况下,左右转头和左右扭腰的动作不可能超过180的角度区间,故设计算法将偏差结果按偏转方向映射到[
‑
90,90],逆时针为负,顺时针为正。该算法首先采用计算角度偏转量与广义偏转量的区间判断,获取角度顺逆时针旋转的标志位;然后再根据角度差值的绝对值除以360取余得到偏差值,判断偏差值是否大于180,大于180用360减去偏差值即可得到实际的偏差值,小于180度则取原偏差值为实际的偏差值;综合顺逆时针旋转标注为与两角度的绝对偏差,计算得到带有旋转方向信息的角度偏差值。具体算法如表所示:
[0075]
表1水平方向偏转角算法
[0076][0077]
1.3.2四肢的抬起定位
[0078]
四肢抬起角度检测,人体四肢抬起动作是基于地球重力的大参考系下,从平行于重力方向的传感器姿态角度变化为垂直于重力方向的传感器姿态角,在这个运动过程中传感器姿态是欧拉角的roll角度发生变化的,通过传感器传过来的四元数计算设备姿态欧拉角的roll角即可得到患者四肢的实时精确角度。
[0079]
1.3.3身体微动(晃动)检测
[0080]
在患者爬姿时,双腿跪在地板上,这个时候向后抬腿,此时脚腕处传感器角度未发生变化,此时无法通过运动传感器姿态角判断腿部运动状态。通过监测此运动过程中的传感器角速度、加速度、磁力计等值的变化,发现在运动过程中某一角度角速度会发生变化,故通过计算三种角速度方差来判断患者运动情况,只要任意一个传感器三轴角速度方差(公式1)大于25就认为患者发生了肢体运动。
[0081][0082]
公式1方差计算公式
[0083]
1.3.4手腕旋转建模
[0084]
患者抬起胳膊至水平,计算此情景下患者左右旋转抬起胳膊的角度,此时传感器未发生大的距离变化,传感器只是围绕手腕横切面中心点画圆,传感器姿态角沿x轴变化,因未发生距离上的大变化,故采用加速度计来计算设备姿态角,此时加速度主要受重力加速度影响,其余方向的加速度影响可忽略不计,在患者左右旋转抬起胳膊时,运动传感器重力加速度值由z轴慢慢变化为x轴,故可计算重力方向在z轴和x轴之间的变化弧度,进而得到传感器的姿态角,此方式在此情景下计算的角度精确,计算逻辑少并且简单,计算效率高。
[0085]
2.系统实现方案
[0086]
如图2所示,本系统主要包括基于安卓设备运行的app;六个可穿戴于四肢、腰部、头部的运动传感设备;可穿戴的肌电设备;系统运行配套附件电源、路由器、安卓设备。
[0087]
app是系统的核心,检测和训练的场景内容由app呈现给使用者,同时可穿戴心脑电设备、可穿戴运动设备以及场景设备的数据均由app收集汇总并处理。app主要分为三大模块,分别为场景交互界面模块、系统设备通信模块、数据保存和评估模块。
[0088]
1)场景交互界面模块的主要功能是9个运动障碍的干预训练任务的展示和交互。
[0089]
2)系统设备通信模块主要是可穿戴运动设备、肌电设备通过wifi的通讯方式以udp通讯协议和app进行实时数据通讯。
[0090]
3)数据保存和评估模块主要包含两块内容,一块是保存使用者训练过程中的实时设备数据和训练评估结果。
[0091]
2.1训练任务的实现
[0092]
如图3所示,训练任务的实现方式是:通过游戏规则告知用户训练任务,用户在完成训练任务时,通过穿戴在使用者身上的运动、肌电传感器实时把使用者的制图运动情况发送到app,app通过算法模型计算使用者的动作,并实时带动界面中的卡通形象来反馈给使用者任务完成情况。
[0093]
2.2系统设备通信
[0094]
2.2.1系统通信方法
[0095]
系统设备通信主要采用wifi的通信方式在局域网内通信,可穿戴运动设备、肌电设备、app运行平台要在同一个局域网内,app运行平台固定占用特定例如192.168.1.254的ip地址,可穿戴运动设备和肌电设备开机并连接到网络后即通过udp协议向254的ip发送数据,通过这种方式可以实现可穿戴九轴运动传感器(3轴加速度计、3轴陀螺仪、3轴磁力计)、肌电传感器的数据采集。
[0096]
2.2.2系统通信数据
[0097]
系统通信数据可以由下表表示:
[0098]
表格1传感器通信数据表
[0099][0100][0101]
2.2.3数据保存和评估
[0102]
在训练任务的执行过程中,系统实时保存穿戴运动传感器、肌电传感器、训练任务完成情况的数据。穿戴运动设备以每秒10次的频率记录使用者运动情况,肌电设备以每秒30次的频率记录使用者训练过程中的肌肉电信号。
[0103]
训练任务评估模块通过采集到的运动传感器和肌电传感器数据,实时计算训练任务的完成情况,并根据一段时间内连续的任务完成情况得到一个任务评估结果。评估结果实时保存,以供后期多次的训练结果进行对比和总结。
[0104]
3.训练任务设计
[0105]
本发明针对患者转头训练、仰卧起坐、俯卧抬头、翻身训练、爬行训练、爬姿训练、坐位训练、立位训练、行走训练这九种训练目的,设计出九种卡通训练场景。
[0106]
转头训练:本训练场景设计为小熊吃苹果(图4),患者左右转头到一定角度后,触发小熊吃到苹果的结果,让患者在训练过程中认为是为了使小熊吃到苹果而做出的动作,增加训练过程中的趣味性。
[0107]
仰卧起坐:本训练场景设计为小熊投篮(图5),患者完成仰卧起坐的动作后,小熊就可以把球投到篮筐中,让患者在训练过程中认为是为了完成小熊投篮的的游戏而做出的动作,增加训练过程中的趣味性。
[0108]
俯卧抬头:本训练场景设计为小熊游泳(图6),患者在俯卧位抬头并把头恢复到俯卧低头状态后,小熊就完成了一次游泳动作,并往前游动一点,小熊游动三次完成一次游泳流程,拿到完成奖杯。
[0109]
翻身训练:本训练场景设计为小熊翻身(图7),患者完成一次翻身动作,场景中的小熊跟着完成一次翻身动作。
[0110]
爬行训练:本训练场景设计为小熊爬行竞赛游戏(图8),患者往前爬行一步,小熊往前爬行一步,小熊往前爬动三步完成一次爬行到终点的流程,拿到完成奖杯。
[0111]
爬姿训练:本训练场景设计为小熊爬姿不摔倒游戏(图9),训练开始后,患者不倒,界面中的小熊就保持爬姿状态,患者摔倒后,小熊摔倒。
[0112]
坐位训练:本训练场景设计为小熊骑车游戏(图10),患者保持坐姿状态,界面中的小熊保持骑车的状态,患者坐姿不稳定,小熊骑车的姿态就跟着不稳定,患者摔倒,小熊骑车摔倒。
[0113]
立位训练:本训练场景设计为小熊保卫城墙游戏(图11),患者保持站姿状态,界面中的小熊保持站立保卫城墙的状态,患者坐姿不稳定,小熊站姿的姿态就跟着不稳定,患者摔倒,小熊摔倒,保卫城墙失败,城墙倒塌。
[0114]
行走训练:本训练场景设计为小熊行走竞赛游戏(图12),患者往前行走一步,小熊往前行走一步,小熊往前行走三步完成一次行走到终点的流程,拿到完成奖杯。
[0115]
4.训练评估与方案推荐
[0116]
4.1训练结果评估
[0117]
每个训练任务的默认时间为30秒,患者在完成对应的训练任务时,会因为患者本身的身体状态的不同反映到在30秒的时间内患者对训练任务的完成情况。
[0118]
转头能力的评估:患者在完成转头训练的任务时,该患者能自主转动头部的角度,完成转头这个动作需要的时长数据就构成了对患者转头能力的评估参数,进而得到患者转头能力的评估结果。
[0119]
仰卧起坐能力的评估:患者在完成仰卧起坐训练的任务时,判断腰部传感器的姿态值,通过计算重力分解在传感器y和z轴上的重力加速度值,得到重力在y轴和z轴之间的角度值,得到腰部实时的基于地平线的姿态角,通过姿态角是否大于60度判断穿戴者是否
完成仰卧起坐。如不能自主完成仰卧起坐的动作,患者最大能完成的仰卧起坐角度;如果患者能够完成仰卧起坐的动作,完成这个动作需要的时间;30秒内能完成多少次仰卧起坐的动作,这些数据就构成了对患者仰卧起坐能力的评估参数,进而得到患者仰卧起坐能力的评估结果。
[0120]
俯卧抬头能力的评估:患者在完成俯卧抬头训练的任务时,该患者能自主俯卧抬头的角度,完成俯卧抬头这个动作需要的时长这些数据就构成了对患者俯卧抬头能力的评估参数,进而得到患者俯卧抬头能力的评估结果。
[0121]
翻身训练能力的评估:患者在完成翻身训练的任务时,该患者能不能自主翻过来身体,完成翻身这个动作需要的时长这些数据就构成了对患者翻身能力的评估参数,进而得到患者翻身能力的评估结果。
[0122]
爬行训练能力的评估:患者在完成爬行训练的任务时,该患者能不能自主向前爬行,在30秒的时间内患者能自主往前爬行多少步这些数据就构成了对患者爬行能力的评估参数,进而得到患者爬行能力的评估结果。
[0123]
爬姿训练能力的评估:患者在完成爬姿训练的任务时,该患者能不能保持爬姿的姿态,保持爬姿姿态的时长,在保持爬姿姿态时能不能同时抬腿、抬胳膊这些动作,在抬腿、抬胳膊时能不能保持住爬姿的姿态这些数据就构成了对患者爬姿能力的评估参数,进而得到患者爬姿能力的评估结果。
[0124]
坐位训练能力的评估:患者在完成坐位训练场景的任务时,该患者能不能自主保持坐姿的平衡,保持坐姿平衡的时长这些数据就构成了对患者坐位平衡能力的评估参数,进而得到患者坐位平衡能力的评估结果。
[0125]
立位训练能力的评估:患者在完成立位训练场景的任务时,该患者能不能自主保持立位的平衡,保持立位平衡的时长这些数据就构成了对患者立位平衡能力的评估参数,进而得到患者立位平衡能力的评估结果。
[0126]
行走训练能力的评估:患者在完成行走训练的任务时,该患者能不能自主向前行走,在30秒的时间内患者能自主往前行走多少步这些数据就构成了对患者行走能力的评估参数,进而得到患者行走能力的评估结果。
[0127]
4.2训练方案推荐(场景、时长)
[0128]
在得到患者九种肢体运动情况的评估结果后,就可以根据结果对九种训练场景的训练时长、训练难度进行参数调整,达到适合患者自身身体状态的个性化训练方案。转头训练、仰卧起坐、俯卧抬头的难度调整的均是对训练任务的角度大小进行调整,例如转头训练默认是转头75度为转头成功,患者实际情况,可以调整为转头65度即可认为转头成功,给患者提示任务成功,以此激发患者训练兴趣,慢慢的根据患者恢复情况再去适当调整系统判断成功的角度,达到训练的康复效果。其余六中训练任务不能调整难度,但可以调整训练任务的时长,那一项能力弱,适当加长对应训练任务的时长,以达到充分锻炼对应的训练能力。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。