1.本发明涉及车辆的减振控制装置、减振控制系统、减振控制方法以及数据提供装置。上述车辆的减振控制装置、上述减振控制系统、上述减振控制方法以及上述数据提供装置例如为了取得被预测为车轮通过的预测通过位置的簧下状态量并基于该取得的簧下状态量来控制用于对簧上进行减振的控制力而使用。
背景技术:
2.公知有一种基于车轮的比当前的接地位置靠前方的路面的位移来运算用于对簧上进行减振的目标控制力并产生与目标控制力一致的控制力的车辆的减振控制装置。这样的基于前方的位移的减振控制亦被称为预演减振控制(preview damping control)。例如,美国专利申请公开第2018/154723所记载的装置基于包括车辆的位置信息以及路面信息的预演参照数据来进行预演减振控制。预演参照数据被存储于能够与上述文献的装置进行通信的服务器。上述文献的装置从服务器下载预演参照数据来利用。上述文献的装置所利用的预演参照数据所包括的路面信息是表示路面的位移的值(路面位移),基于由照相机传感器、lidar、雷达、平面或者三维扫描传感器等预演传感器取得的传感检测数据而生成。
3.使用了基于上述路面位移运算出的目标控制力的预演减振控制的簧上的减振性能比使用了基于表示簧下的上下方向的位移状态的簧下状态量运算出的目标控制力的预演减振控制的簧上的减振性能低。以下,使用图1所示的一个例子对其理由进行说明。
4.图1表示了路面55上的车辆的单轮模型。如图1所示,在簧下50与簧上51之间并列配置有弹簧52、减震器53以及产生上述控制力的促动器54。簧下50的质量被记为簧下质量m1。簧上51的质量被记为簧上质量m2。路面55的上下方向的位移被记为路面位移z0。簧下50的上下方向的位移被记为簧下位移z1。簧上51的上下方向的位移被记为簧上位移z2。弹簧52的弹簧常数(等效弹簧常数)被表示为弹簧常数k,车轮的轮胎的弹簧常数被表示为弹簧常数kt,减震器53的衰减系数(等效衰减系数)被表示为衰减系数c,促动器54所产生的控制力被表示为控制力fc。
5.并且,z0、z1以及z2的时间微分值分别被记为dz0、dz1以及dz2,z1以及z2的二阶时间微分值分别被记为ddz1以及ddz2。其中,以下,关于z0、z1以及z2,规定为向上方的位移为正,关于弹簧52、减震器53以及促动器54等所产生的力,规定为向上为正。
6.在图1所示的单轮模型中,关于簧上51的上下方向的运动的运动方程式能够用式(1)表达,关于簧下50的上下方向的运动的运动方程式能够用式(2)表达。
7.m2ddz2=c(dz1-dz2) k(z1-z2)-fc
···
(1)
8.m1ddz1=c(dz2-dz1) k(z2-z1) kt(z0-z1) fc
···
(2)
9.这里,对如下式(3)那样基于路面位移z0表达了控制力fc时的簧上位移z2的振动进行研究。其中,式(3)中的α0是大于0且为1以下的任意的常量。
10.fc=α0(cdz0 kz0)
···
(3)
11.若对在将式(3)应用于式(1)之后进行拉普拉斯变换而得的式以及在将式(3)应用
于式(2)之后进行拉普拉斯变换而得的式进行整理,则可获得下式(4)。即,从路面位移z0向簧上位移z2的传递函数(z2/z0)可用式(4)表达。“s”是拉普拉斯算子。
[0012][0013]
另一方面,对如下式(5)那样基于簧下位移z1表达了控制力fc时的簧上位移z2的振动进行研究。其中,式(5)中的α是大于0且为1以下的任意的常量。
[0014]
fc=α(cdz1 kz1)
···
(5)
[0015]
若对将式(5)应用于式(1)之后进行拉普拉斯变换而得的式以及将式(5)应用于式(2)之后进行拉普拉斯变换而得的式进行整理,则可获得下式(6)。即,上述传递函数(z2/z0)可用式(6)表达。
[0016][0017]
根据式(4),即便α0为“1”,也剩余“-m1α0(cs2 ks2)”的项。与此相对,根据式(6),在α为“1”的情况下,由于传递函数(z2/z0)成为“0”,所以可完全消除簧上51的振动。因此,使用了基于式(3)运算出的目标控制力(即,基于路面位移z0运算出的目标控制力)的预演减振控制的簧上51的减振性能比使用了基于式(5)运算出的目标控制力(即,基于簧下位移z1运算出的目标控制力)的预演减振控制的簧上51的减振性能低。
[0018]
并且,由于预演参照数据所包括的路面位移是基于预演传感器所取得的传感检测数据(例如图像数据)而取得的,所以与实际的路面位移的误差变大的可能性高。
[0019]
综上所述,上述文献的装置由于基于上述路面位移来进行预演减振控制,所以无法恰当地对簧上进行减振的可能性高。即,根据上述文献的装置,预演减振控制的减振性能降低的可能性高。
技术实现要素:
[0020]
本发明提供能够使预演减振控制的减振性能提高的车辆的减振控制装置、减振控制系统、减振控制方法以及数据提供装置。
[0021]
本发明的第1方式是车辆的减振控制装置。上述减振控制装置具备:控制力产生装置,构成为在至少一个车轮和与上述车轮的位置对应的车身部位之间产生用于对车辆的簧上进行减振的上下方向的控制力;和电子控制单元,构成为控制上述控制力产生装置来变更上述控制力。上述电子控制单元构成为基于簧下状态量与位置信息建立关联而得到的数据集亦即预演参照数据来取得预测通过位置处的簧下状态量作为预演状态量,上述簧下状态量表示当上述车辆以及其他车辆的至少一方实际在路面实际行驶时所取得的因上述路面的位移而实际沿上下方向位移了的簧下的位移状态,上述位置信息能够确定取得了上述簧下状态量时的车轮的位置,上述预测通过位置是预测为上述车辆的上述车轮在从当前时刻起经过规定时间的时刻通过的位置,并构成为在上述车轮通过上述预测通过位置的时刻执行对上述控制力产生装置进行控制的预演减振控制,以使上述控制力产生装置所产生的上述控制力与基于上述预演状态量而运算的上述控制力的目标值亦即目标控制力一致。
[0022]
上述减振控制装置中的预演参照数据包括簧下状态量,上述减振控制装置使用基
于簧下状态量而运算出的目标控制力来执行预演减振控制。由此,上述减振控制装置能够使簧上的减振性能比使用基于路面位移而运算出的目标控制力的预演减振控制提高。并且,上述减振控制装置中的预演参照数据所包括的簧下状态量是当车辆以及其他车辆的至少一方实际在路面行驶时取得的“表示因上述路面的位移而实际沿上下方向移动了的簧下的上下方向的位移状态的值”。因此,与上述文献的装置中的路面位移相比,上述减振控制装置中的预演参照数据所包括的簧下状态量包含误差的可能性低。综上所述,根据上述第1方式,由于上述减振控制装置使用预演参照数据所包括的簧下状态量来执行预演减振控制,所以能够使能够对簧上适当地进行减振这一预演减振控制的减振性能提高。
[0023]
在上述第1方式中,上述预演参照数据所包括的簧下状态量可以是被实施了将小于比规定的簧上共振频率小的规定的第1截止频率的频率成分除去的滤波处理之后的簧下状态量。
[0024]
如上所述,预演参照数据所包括的簧下状态量与上述文献的装置中的路面位移相比,包含误差的可能性低,但存在低频率区域(小于第1截止频率的频率区域)中的簧下状态量包括因传感器漂移引起的相对大的误差的可能性。根据上述结构,从预演参照数据所包括的簧下状态量除去了低频率成分(小于第1截止频率的频率成分)。因此,包括因传感器漂移引起的误差的低频率区域的簧下状态量不被保存为预演数据。因此,由于这样的簧下状态量在预演减振控制中不被使用,所以能够使预演减振控制的减振性能提高,还能够减少因预演减振控制而使簧上激振的可能性。
[0025]
在上述第一方式中,上述预演参照数据所包括的簧下状态量可以是被实施了将比规定的车辆的簧上共振频率与上述规定的车辆的簧下共振频率之间的规定的第2截止频率大的频率成分除去的滤波处理之后的簧下状态量。
[0026]
存在簧下共振时的簧下状态量包括相对大的误差的可能性。根据上述结构,从预演参照数据所包括的簧下状态量除去了“比小于簧下共振频率的规定的第2截止频率大的频率成分”。因此,包括因簧下的共振引起的误差的簧下状态量不被保存为预演参照数据。因此,由于这样的簧下状态量在预演减振控制中不被使用,所以能够使预演减振控制的减振性能提高,还能够减少因预演减振控制而使簧上激振的可能性。
[0027]
在上述第一方式中,上述预演参照数据所包括的簧下状态量可以是被实施了将小于比规定的簧上共振频率小的规定的第1截止频率的频率成分除去并且将比上述簧上共振频率与上述车辆的簧下共振频率之间的规定的第2截止频率大的频率成分除去的滤波处理之后的簧下状态量。
[0028]“包括因上述的传感器漂移引起的误差的低频率区域的簧下状态量”以及“包括因上述的簧下的共振引起的误差的簧下状态量”可以不被保存为预演参照数据。因此,根据上述结构,由于这样的簧下状态量在预演减振控制中不被使用,所以能够使预演减振控制的减振性能提高,还能够减少因预演减振控制而使簧上激振的可能性。
[0029]
在上述第一方式中,上述电子控制单元可以构成为基于上述预演参照数据来从比规定的判别阈值频率大的频率成分被除去了的簧下状态量取得上述预测通过位置的簧下状态量作为低频侧簧下状态量,并且基于上述预演参照数据从上述判别阈值频率以下的频率成分被除去了的簧下状态量取得上述预测通过位置的簧下状态量作为高频侧簧下状态量。上述电子控制单元可以构成为基于上述预演参照数据,通过将上述低频侧簧下状态量
与规定的低频侧增益相乘而得的值和上述高频侧簧下状态量与比上述低频侧增益大的规定的高频侧增益相乘而得的值相加来取得上述目标控制力。
[0030]
比判别阈值频率大的高频侧的频率区域的簧下状态量小于相对于实际的路面位移的簧下状态量的可能性可以比判别阈值频率以下的低频侧的频率区域的簧下状态量小于相对于实际的路面位移的簧下状态量的可能性高。根据上述结构,由于在运算目标控制力时使用低频侧增益和“比低频侧增益大的高频侧增益”,所以能够减少高频侧目标控制力比相对于实际的路面位移所需的控制力小的可能性。由此,能够通过预演减振控制对簧上适当地进行减振,能够使预演减振控制的减振性能提高。
[0031]
在上述第1方式中,上述预演参照数据所包括的簧下状态量可以是基于上述簧上以及上述簧下的至少一方的上下方向的运动状态量而取得的表示上述簧下的上下方向的位移的簧下位移或者上述簧下位移的速度。
[0032]
根据上述结构,由于基于簧上以及簧下的至少一方的上下方向的运动状态量来运算簧下状态量,所以能够运算更准确的值。
[0033]
本发明的第2方式是减振控制系统。上述减振控制系统包括车辆和存储装置。上述车辆构成为通过对控制力产生装置进行控制来变更用于对簧上进行减振的上下方向的控制力,上述控制力产生装置构成为在至少一个车轮和与上述车轮的位置对应的车身部位之间产生上述控制力。上述存储装置构成为经由网络与上述车辆连接,并预先存储有簧下状态量与位置信息建立关联而得到的数据集亦即预演参照数据,上述簧下状态量表示当上述车辆以及其他车辆的至少一方实际在路面行驶时取得的因上述路面的位移而实际沿上下方向位移了的簧下的位移状态,上述位置信息能够确定取得了上述簧下状态量时的车轮的位置。上述存储装置构成为将上述预演参照数据提供给上述车辆。上述车辆构成为从由上述存储装置提供的上述预演参照数据取得预测通过位置处的簧下状态量作为预演状态量,上述预测通过位置是预测为上述车轮在从当前时刻经过规定时间的时刻通过的位置;并构成为在上述车轮通过上述预测通过位置的时刻执行控制上述控制力产生装置的预演减振控制,以使上述控制力产生装置所产生的上述控制力与基于上述预演状态量运算出的用于对上述簧上进行减振的目标控制力一致。
[0034]
如上所述,由于使用基于簧下状态量运算出的目标控制力来执行预演减振控制,所以能够使簧上的减振性能比使用基于路面位移而运算出的目标控制力的预演减振控制提高。并且,与上述文献的装置的路面位移相比,预演参照数据所包括的簧下状态量包含误差的可能性低。因此,根据上述第2方式,能够使可对簧上适当地进行减振这一预演减振控制的减振性能提高。
[0035]
本发明的第3方式是一种减振控制方法,通过对控制力产生装置进行控制来变更用于对车辆的簧上进行减振的上下方向的控制力,上述控制力产生装置构成为在至少一个车轮和与上述车轮的位置对应的车身部位之间产生上述控制力。上述减振控制方法包括:上述车辆基于簧下状态量与位置信息建立关联而得到的数据集亦即预演参照数据来取得预测通过位置处的簧下状态量作为预演状态量的步骤,上述簧下状态量表示当上述车辆以及其他车辆的至少一方实际在路面行驶时取得的因上述路面的位移而实际沿上下方向位移了的簧下的位移状态,上述位置信息能够确定取得了上述簧下状态量时的车轮的位置,上述预测通过位置是预测为上述车轮在从当前时刻经过规定时间的时刻通过的位置;和上
述车辆在上述车轮通过上述预测通过位置的时刻控制上述控制力产生装置,以使上述控制力产生装置所产生的上述控制力与基于所取得的上述预演状态量而运算出的用于对上述簧上进行减振的目标控制力一致的步骤。
[0036]
如上所述,由于使用基于簧下状态量运算出的目标控制力来执行预演减振控制,所以能够使簧上的减振性能比使用基于路面位移而运算出的目标控制力的预演减振控制提高。并且,与上述文献的装置的路面位移相比,预演参照数据所包括的簧下状态量包含误差的可能性低。因此,根据上述第3方式,能够使可对簧上适当地进行减振这一预演减振控制的减振性能提高。
[0037]
本发明的第4方式是包括控制器的数据提供装置。上述控制器构成为对于执行预演减振控制的车辆提供上述预演减振控制的执行所需的预演参照数据,上述预演减振控制通过对控制力产生装置进行控制来使车辆变更用于对簧上进行减振的上下方向的控制力,上述控制力产生装置构成为在至少一个车轮和与上述车轮的位置对应的车身部位之间产生上述控制力。上述预演参照数据是簧下状态量与位置信息建立关联而得到的数据集,上述簧下状态量表示当上述车辆以及其他车辆的至少一方实际在路面行驶时取得的因上述路面的位移而实际沿上下方向位移了的簧下的位移状态,上述位置信息能够确定取得了上述簧下状态量时的车轮的位置。上述车辆构成为基于从上述数据提供装置提供的预演参照数据来取得预测通过位置处的簧下状态量作为预演状态量,并在上述车轮通过上述预测通过位置的时刻,执行控制上述控制力产生装置的上述预演减振控制,以使上述控制力产生装置所产生的上述控制力与基于上述预演状态量运算的上述控制力的目标值亦即目标控制力一致,上述预测通过位置是预测为上述车轮在从当前时刻经过规定时间的时刻通过的位置。
[0038]
根据上述第4方式,能够将车辆为了使用基于簧下状态量而运算出的目标控制力来执行预演减振控制所需的预演参照数据提供给车辆。由此,车辆能够使可对簧上适当地进行减振这一预演减振控制的减振性能提高。
附图说明
[0039]
以下,参照附图对本发明的示例性实施例的特征、优点、技术及工业重要性进行说明,在附图中相同的附图标记表示相同的构成要素,其中:
[0040]
图1是表示车辆的单轮模型的图。
[0041]
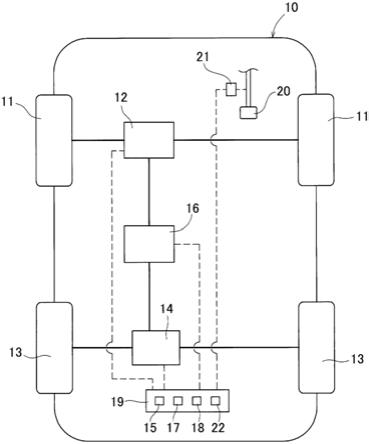
图2是应用本发明的实施方式所涉及的预演减振控制装置的车辆的简要构成图。
[0042]
图3是本发明的实施方式所涉及的预演减振控制装置的简要构成图。
[0043]
图4是用于对预演减振控制进行说明的图。
[0044]
图5是用于对预演减振控制进行说明的图。
[0045]
图6是用于对预演减振控制进行说明的图。
[0046]
图7是表示电子控制装置的cpu所执行的例程的流程图。
[0047]
图8是表示电子控制装置的cpu所执行的例程的流程图。
[0048]
图9是表示电子控制装置的cpu所执行的例程的流程图。
[0049]
图10是用于对本发明的实施方式的第1变形例进行说明的图。
[0050]
图11是表示第1变形例的电子控制装置的cpu所执行的例程的流程图。
[0051]
图12是表示本发明的实施方式的第2变形例的电子控制装置的cpu所执行的例程的流程图。
具体实施方式
[0052]
<构成>
[0053]
本发明的实施方式所涉及的车辆的减振控制装置被应用于图2所示的车辆10。如图3所示,以下将该减振控制装置亦称为“减振控制装置20”。
[0054]
如图2所示,车辆10具备左前轮11fl、右前轮11fr、左后轮11rl以及右后轮11rr。左前轮11fl被车轮支承部件12fl以能够旋转的方式支承于车身10a。右前轮11fr被车轮支承部件12fr以能够旋转的方式支承于车身10a。左后轮11rl被车轮支承部件12rl以能够旋转的方式支承于车身10a。右后轮11rr被车轮支承部件12rr以能够旋转的方式支承于车身10a。
[0055]
此外,对于左前轮11fl、右前轮11fr、左后轮11rl以及右后轮11rr而言,在不需要区别它们的情况下,被称为“车轮11”。同样,左前轮11fl以及右前轮11fr被称为“前轮11f”。同样,左后轮11rl以及右后轮11rr被称为“后轮11r”。车轮支承部件12fr~12rl被称为“车轮支承部件12”。
[0056]
车辆10还具备左前轮悬架13fl、右前轮悬架13fr、左后轮悬架13rl以及右后轮悬架13rr。以下详细地对这些悬架13fr~13rl的详细情况进行说明。这些悬架13fr~13rl是独立悬挂式的悬架,但也可以是其他形式的悬架。
[0057]
左前轮悬架13fl从车身10a悬挂左前轮11fl,包括悬架臂14fl、减震器15fl以及悬架弹簧16fl。右前轮悬架13fr从车身10a悬挂右前轮11fr,包括悬架臂14fr、减震器15fr以及悬架弹簧16fr。
[0058]
左后轮悬架13rl从车身10a悬挂左后轮11rl,包括悬架臂14rl、减震器15rl以及悬架弹簧16rl。右后轮悬架13rr从车身10a悬挂右后轮11rr,包括悬架臂14rr、减震器15rr以及悬架弹簧16rr。
[0059]
此外,对于左前轮悬架13fl、右前轮悬架13fr、左后轮悬架13rl以及右后轮悬架13rr而言,在不需要区别它们的情况下,被称为“悬架13”。同样,悬架臂14fr~14rl被称为“悬架臂14”。同样,减震器15fr~15rl被称为“减震器15”。同样,悬架弹簧16fr~16rl被称为“悬架弹簧16”。
[0060]
悬架臂14将车轮支承部件12与车身10a连结。此外,在图2中,悬架臂14相对于一个悬架13仅图示了一个,但悬架臂14也可以相对于一个悬架13设置有多个。
[0061]
减震器15被配设于车身10a与悬架臂14之间,在上端与车身10a连结,在下端与悬架臂14连结。悬架弹簧16经由减震器15被弹性安装于车身10a与悬架臂14之间。即,悬架弹簧16的上端与车身10a连结,其下端与减震器15的缸体连结。此外,在这样的悬架弹簧16的弹性安装方式下,减震器15也可以被配设于车身10a与车轮支承部件12之间。
[0062]
并且,在本例中,减震器15是衰减力不可变式的减震器,但减震器15也可以是衰减力可变式的减震器。并且,悬架弹簧16也可以不经由减震器15而被弹性安装于车身10a与悬架臂14之间。即,可以使悬架弹簧16的上端与车身10a连结、其下端与悬架臂14连结。此外,在这样的悬架弹簧16的弹性安装方式下,减震器15以及悬架弹簧16也可以配设于车身10a
与车轮支承部件12之间。
[0063]
将车辆10的车轮11以及减震器15等部件中的比悬架弹簧16靠车轮11侧的部分称为“簧下50或者簧下部件50(参照图1)”。与此相对,将车辆10的车身10a以及减震器15等部件中的比悬架弹簧16靠车身10a侧的部分称为“簧上51或者簧上部件51(参照图1)”。
[0064]
并且,在车身10a与悬架臂14fr~14rl各自之间设置有左前轮主动促动器17fl、右前轮主动促动器(active actuator)17fr、左后轮主动促动器17rl以及右后轮主动促动器17rr。这些主动促动器17fr~17rl分别相对于减震器15fr~15rl以及悬架弹簧16fr~16rl并列设置。
[0065]
此外,对于左前轮主动促动器17fl、右前轮主动促动器17fr、左后轮主动促动器17rl以及右后轮主动促动器17rr而言,在不需要区别它们的情况下,被称为“主动促动器17”。同样,左前轮主动促动器17fl以及右前轮主动促动器17fr被称为“前轮主动促动器17f”。同样,左后轮主动促动器17rl以及右后轮主动促动器17rr被称为“后轮主动促动器17r”。
[0066]
主动促动器17基于来自图3所示的电子控制装置30的控制指令来产生控制力fc。控制力fc是为了对簧上51进行减振而作用于车身10a与车轮11之间(即,簧上51与簧下50之间)的上下方向的力。此外,电子控制装置30被称为ecu30,也存在被称为“控制单元30或者控制器30”的情况。并且,主动促动器17也存在被称为“控制力产生装置17”的情况。主动促动器17是电磁式的主动悬架装置。主动促动器17与减震器15以及悬架弹簧16等协作而构成主动悬架。
[0067]
如图3所示,减振控制装置20除了包括上述的ecu30之外,还包括存储装置30a、上下加速度传感器31fr~31rl、行程传感器32fr~32rl、位置信息取得装置33以及无线通信装置34。并且,减振控制装置20包括上述的主动促动器17fr~17rl。
[0068]
ecu30包括微型计算机。微型计算机包括cpu、rom、ram以及接口(i/f)等。cpu通过执行储存于rom的命令(程序、例程)来实现各种功能。
[0069]
ecu30与能够实现信息的读写的非易失性的存储装置30a连接。在本例中,存储装置30a是硬盘驱动器。ecu30能够将信息存储(保存)于存储装置30a,并读出存储(保存)于存储装置30a的信息。此外,存储装置30a并不限定于硬盘驱动器,只要是能够实现信息的读写的存储装置或者存储介质即可。
[0070]
ecu30与上下加速度传感器31fr~31rl以及行程传感器32fr~32rl连接,接收这些传感器输出的信号。
[0071]
上下加速度传感器31fr~31rl分别检测相对于各车轮11fr~11rl的位置的车身10a(簧上51)的上下加速度(簧上加速度ddz2fr~ddz2rl),并输出表示该上下加速度的信号。此外,对于上下加速度传感器31fr~31rl而言,在不需要区别它们的情况下,被称为“上下加速度传感器31”。同样,簧上加速度ddz2fr~ddz2rl被称为“簧上加速度ddz
2”。
[0072]
行程传感器32fr~32rl分别对于左前轮悬架13fl、右前轮悬架13fr、左后轮悬架13rl以及右后轮悬架13rr而设置。行程传感器32fr~32rl分别检测悬架13fr~13rl的上下方向的行程hfr~hrl,并输出表示该上下行程的信号。行程hfr~hrl是和图2所示的各车轮11的位置对应的车身10a(簧上51)与各车轮支承部件12fr~12rl各自之间的上下行程。此外,对于行程传感器32fr~32rl而言,在不需要区别它们的情况下,被称为“行程传感器
32”。同样,行程hfr~hrl被称为“行程h”。
[0073]
并且,ecu30与位置信息取得装置33以及无线通信装置34连接。
[0074]
位置信息取得装置33具备gnss(global navigation satellite system)接收器以及地图数据库。gnss接收器接收用于检测车辆10的当前时刻的位置(当前位置)的“来自人造卫星的信号(例如gnss信号)”。在地图数据库存储有道路地图信息等。位置信息取得装置33是基于gnss信号来取得车辆10的当前位置(例如纬度以及经度)的装置,例如为导航装置。
[0075]
此外,ecu30基于位置信息取得装置33所取得的当前位置的历史记录来取得当前时刻的“车辆10的车速v1以及车辆10的行进方向td”。
[0076]
无线通信装置34是用于经由网络与云40通信信息的无线通信终端。云40具备与网络连接的“管理服务器42以及多个存储装置44a~44n”。对于一个或者多个存储装置44a~44n而言,在不需要区别它们的情况下,称为“存储装置44”。
[0077]
管理服务器42具备cpu、rom、ram以及接口(i/f)等。管理服务器42进行存储于存储装置44的数据的检索以及读出,并且将数据写入至存储装置44。
[0078]
在存储装置44存储有预演参照数据45。在预演参照数据45中建立关联(相互建立联系)地登记有车辆10实际在路面行驶时所取得的簧下位移z1以及位置信息。换言之,车辆10将行驶中的车辆10的车轮11的位置与该车轮11的位置处的簧下位移z1的实际值(关于该实际值的取得方法将后述)建立关联并发送至管理服务器42,管理服务器42将它们作为预演参照数据45存储于存储装置44。
[0079]
对于簧下50而言,当车辆10在路面行驶时接受上述路面的位移而沿上下方向位移。簧下位移z1是与车辆10的各车轮11的位置对应的簧下50的上下方向的位移。位置信息是取得了簧下位移z1的时刻的“表示取得了该簧下位移z1的车轮11的位置(例如纬度以及经度)的信息”。此外,基于车辆10的位置来计算车轮11的位置。在图3中,作为被登记为预演参照数据45的“簧下位移z1以及位置信息”的一个例子,示出了簧下位移“z1a”以及位置信息“xa,ya”。
[0080]
并且,ecu30与左前轮主动促动器17fl、右前轮主动促动器17fr、左后轮主动促动器17rl以及右后轮主动促动器17rr分别经由驱动电路(未图示)而连接。
[0081]
ecu30基于各车轮11的后述的预测通过位置的簧下位移z1来运算用于对簧上51进行减振的目标控制力fct,并控制主动促动器17以便在各车轮11通过预测通过位置时主动促动器17产生与目标控制力fct对应(一致)的控制力fc。
[0082]
<基本的预演减振控制的概要>
[0083]
以下,使用图1对减振控制装置20所执行的基本的预演减振控制的概要进行说明。
[0084]
弹簧52相当于悬架弹簧16,减震器53相当于减震器15,促动器54相当于主动促动器17。假定为减震器15的衰减系数c恒定,但由于实际的衰减系数根据悬架13的行程速度而变化,所以例如可以将衰减系数c设定为根据行程h的时间微分值而变化的值。
[0085]
在上述的式(1)中通过控制力fc完全消除了簧上51的振动的情况下(即,簧上加速度ddz2、簧上速度dz2以及簧上位移z2分别成为零的情况下),控制力fc用式(7)表达。
[0086]
fc=cdz1 kz1···
(7)
[0087]
假设对用上述的式(5)表达了控制力fc时的簧上位移z2的振动进行研究。若将式
(5)应用于式(1),则式(1)能够用下式(8)表达。
[0088]
m2ddz2=c(dz1-dz2) k(z1-z2)-α(cdz1 kz1)
···
(8)
[0089]
若对该式(8)进行拉普拉斯变换并进行整理,则获得下式(9)。即,从簧下位移z1向簧上位移z2的传递函数用式(9)表达。其中,式(9)中的“s”是拉普拉斯算子。
[0090][0091]
根据式(9),传递函数根据α而变化。若α为大于0且1以下的任意的值,则可确认为传递函数的大小可靠地小于“1”(即,能够减少簧上51的振动)。并且,在α为1的情况下,由于传递函数的大小成为“0”,所以可确认为簧上51的振动被完全消除。基于式(5),目标控制力fct能够用以下的式(10)表达。其中,式(10)中的增益β1相当于αc,增益β2相当于αk。
[0092]
fct=β1×
dz1 β2×
z1···
(10)
[0093]
因此,ecu30预先取得(预测)车轮11将来通过的位置(预测通过位置)处的簧下位移z1,并通过将所取得的簧下位移z1应用于式(10)来运算目标控制力fct。而且,ecu30在车轮11通过预测通过位置的时机(即,产生被应用于式(10)的簧下位移z1的时机)使促动器54产生与目标控制力fct对应的控制力fc。这样一来,在车轮11经过了预测通过位置时(即,产生被应用于式(10)的簧下位移z1时),能够减少簧上51的振动。
[0094]
此外,也可以基于从式(10)省略了微分项(β1×
dz1)后的以下的式(11)来运算目标控制力fct。在该情况下,由于也可从促动器54产生减少簧上51的振动的控制力fc(=β2×
z1),所以与不产生控制力fc的情况相比,能够减少簧上51的振动。
[0095]
fct=β2×
z1···
(11)
[0096]
以上是簧上51的减振控制,这样的簧上51的减振控制被称为“预演减振控制”。
[0097]
(工作的概要)
[0098]
以下,对减振控制装置20的工作的概要进行说明。如上所述,在预演参照数据45中建立关联地登记有簧下位移z1与位置信息。减振控制装置20根据从位置信息取得装置33取得的与车辆10的位置相关的信息和该预演参照数据45来取得预测通过位置处的簧下位移z1,并基于该簧下位移z1来运算目标控制力fct。而且,减振控制装置20控制主动促动器17以便在车轮11通过预测通过位置的时机主动促动器17输出与目标控制力fct对应的控制力fc。
[0099]
由此,由于使用基于簧下位移z1运算出的目标控制力fct来执行预演减振控制,所以与使用基于路面位移z0运算出的目标控制力fct而执行的预演减振控制相比,能够恰当地减少簧上51的振动,能够使预演减振控制的减振性能提高。
[0100]
并且,在本实施方式中,在预演参照数据45中建立关联地登记有簧下位移z1与位置信息。簧下位移z1是表示当车辆10以及其他车辆实际在路面55行驶时因上述路面55的位移而沿上下方向位移了的簧下50的位移的值。这样的簧下位移z1的实际值可基于对簧上51以及簧下50的任意一个的上下方向的运动进行表示的运动状态量来取得。作为一个例子,通过从对上下加速度传感器31所取得的簧上加速度ddz2进行了2阶积分而得的值减去“行程传感器32所取得的行程h(=z2-z1)”来取得簧下位移z1的实际值。
[0101]
与如相关技术的装置那样基于照相机传感器、lidar、雷达以及“平面或者三维扫描传感器”等预演传感器所取得的传感检测数据而运算的路面位移z0相比,该簧下位移z1的
实际值包括误差的可能性低。在本实施方式中,由于基于这样的簧下位移z1来进行预演减振控制,所以能够实现预演减振控制的减振性能的提高。
[0102]
并且,存在上述预演传感器因外部环境而无法取得能够取得路面位移z0的传感检测数据的可能性。例如,在昏暗的状况下从上述预演传感器(特别是照相机传感器)所取得的传感检测数据无法取得路面位移z0的可能性高。并且,由于上述簧下位移z1的运算处理比从上述传感检测数据取得路面位移z0的处理简单,所以簧下位移z1的运算处理的负荷比路面位移z0的取得处理的负荷轻。除此之外,预演传感器昂贵。在本实施方式中,由于不使用预演传感器就可取得簧下位移z1,所以无论外部环境如何,均能够以更轻的处理负荷廉价地收集簧下位移z1。
[0103]
(工作例)
[0104]
以下,参照图4~图6对减振控制装置20的工作的例子进行说明。图4表示了在当前时刻tp向箭头a1所示的方向以车速v1行驶的车辆10。此外,在以下的说明中,前轮11f以及后轮11r是左右任意一侧的车轮,视为前轮11f以及后轮11r的移动速度与车速v1相同。
[0105]
在图4中,线lt是假想的时间轴t。当前、过去以及未来的时刻t时的前轮11f在移动路线上的簧下位移z1由时间t的函数z1(t)表达。因此,前轮11f的当前时刻tp的位置(接地点)pf0的簧下位移z1被表达为z1(tp)。并且,后轮11r的当前时刻tp的位置pr0的簧下位移z1是比当前时刻tp靠前“前轮11f移动轴距长l所花费的时间(l/v1)”的时刻“tp-l/v1”时的前轮11f的簧下位移z1。因此,当前时刻tp时的后轮11r的簧下位移z1被表达为z1(tp-l/v1)。
[0106]
首先,对前轮11f的预演减振控制进行说明。ecu30确定比当前时刻tp靠后(未来)前轮预测时间(front wheel preview period)tpf的前轮11f的预测通过位置pf1。其中,前轮预测时间tpf被预先设定为从ecu30确定预测通过位置pf1起直至前轮主动促动器17f输出与目标控制力fcft对应的控制力fcf为止所需的时间。
[0107]
前轮11f的预测通过位置pf1是沿着预测为前轮11f移动的路线亦即前轮移动预测路线从当前时刻tp的位置pf0起离开了前轮预测距离lpf(=v1
×
tpf)的位置。如后面详述那样,基于位置信息取得装置33所取得的车辆10的当前位置来计算位置pf0。
[0108]
另外,ecu30从云40预先取得车辆10的当前位置的附近区域(后述的准备区间)中的预演参照数据45的一部分。ecu30基于确定出的预测通过位置pf1与预先取得的预演参照数据45的一部分来取得簧下位移z1(tp tpf)。此外,ecu30也可以如以下那样取得簧下位移z1(tp tpf)。首先,ecu30将确定出的预测通过位置pf1发送至云40。云40基于该预测通过位置pf1与预演参照数据45来取得与表示预测通过位置pf1的位置信息建立了关联的簧下位移z1(tp tpf)。云40将该簧下位移z1(tp tpf)发送至ecu30。
[0109]
ecu30通过将簧下位移z1(tp tpf)应用于以下的式(12)的簧下位移z1来运算目标控制力fcft(=βf
×
z1(tp tpf))。
[0110]
fcft=βf
×
z1···
(12)
[0111]
ecu30将包括目标控制力fcft的控制指令发送至前轮主动促动器17f,以便前轮主动促动器17f产生与目标控制力fcft对应(一致)的控制力fcf。
[0112]
如图5所示,前轮主动促动器17f在从当前时刻tp靠后前轮预测时间tpf的“时刻tp tpf”(即,前轮11f实际通过预测通过位置pf1的时机)产生与目标控制力fcft对应的控制
力fcf。因此,前轮主动促动器17f能够在适当的时机产生使因前轮11f的预测通过位置pf1的簧下位移z1而产生的簧上51的振动适当地减少的控制力fcf。
[0113]
接下来,对后轮11r的预演减振控制进行说明。ecu30确定比当前时刻tp靠后(未来)的后轮预测时间tpr的后轮11r的预测通过位置pr1。后轮预测时间tpr被预先设定为从ecu30确定预测通过位置pr1起直至后轮主动促动器17r输出与目标控制力fcrt对应的控制力fcr为止所需的时间。其中,在前轮主动促动器17f与后轮主动促动器17r是不同的主动促动器的情况下,前轮预测时间tpf以及后轮预测时间tpr被预先设定为不同的值。在前轮主动促动器17f与后轮主动促动器17r是相同的主动促动器的情况下,前轮预测时间tpf以及后轮预测时间tpr被预先设定为相同的值。
[0114]
ecu30将沿着假定为后轮11r追踪与前轮11f相同的路线的情况下的后轮11r的移动预测路线从当前时刻tp的位置pr0离开了后轮预测距离lpr(=v1
×
tpr)的位置确定为预测通过位置pr1。如后面详述那样,位置pr0基于位置信息取得装置33所取得的车辆10的当前位置来计算。由于该预测通过位置pr1的簧下位移z1是从“前轮11f位于后轮11r的当前时刻的位置pr0的时刻(tp-l/v1)”靠后后轮预测时间tpr的簧下位移z1,所以能够表达为z1(tp-l/v1 tpr)。ecu30基于确定出的预测通过位置pr1与预先取得的预演参照数据45的一部分来取得簧下位移z1(tp-l/v1 tpr)。此外,ecu30也可以如以下那样取得簧下位移z1(tp-l/v1 tpr)。首先,ecu30将确定出的预测通过位置pr1发送至云40。云40基于该预测通过位置pr1与预演参照数据45来取得与表示预测通过位置pr1的位置信息建立了关联的簧下位移z1(tp-l/v1 tpr)。云40将该簧下位移z1(tp-l/v1 tpr)发送至ecu30。
[0115]
并且,ecu30通过将簧下位移z1(tp-l/v1 tpr)应用于以下的式(13)的簧下位移z1来运算目标控制力fcrt(=βr
×
z1(tp-l/v1 tpr))。其中,式(12)中的增益βf以及式(13)中的增益βr被设定为相互不同的值。这是因为左前轮悬架13fl以及右前轮悬架13fr的弹簧常数kf与左后轮悬架13rl以及右后轮悬架13rr的弹簧常数kr不同。
[0116]
fcrt=βr
×
z1···
(13)
[0117]
ecu30将包括目标控制力fcrt的控制指令发送至后轮主动促动器17r,以便后轮主动促动器17r产生与目标控制力fcrt对应(一致)的控制力fcr。
[0118]
如图6所示,后轮主动促动器17r在比当前时刻tp靠后后轮预测时间tpr的“时刻tp tpr”(即,后轮11r实际通过预测通过位置pr1的时机)产生与目标控制力fcrt对应的控制力fcr。因此,后轮主动促动器17r能够在适当的时机产生使因后轮11r的预测通过位置pr1的簧下位移z1而产生的簧上51的振动适当地减少的控制力fcr。
[0119]
(具体的工作)
[0120]
<预演减振控制例程>
[0121]
每经过规定时间,ecu30的cpu(以下,在记载为“cpu”的情况下,只要未特别声明则指ecu30的cpu)便执行图7中用流程图所示的预演减振控制例程。
[0122]
因此,若成为规定的时机,则cpu从图7的步骤700开始处理并依次执行步骤705~步骤740,然后进入至步骤795而暂时结束本例程。
[0123]
步骤705:cpu从位置信息取得装置33取得与车辆10的当前位置相关的信息,确定(取得)各车轮11的当前位置、车速v1以及车辆10的行进方向td。
[0124]
更详细而言,cpu在地图数据库所包括的道路地图信息标绘(mapping)上次当前位
置以及本次当前位置,将从上次当前位置朝向本次当前位置的方向确定为车辆10的行进方向td。其中,上次当前位置是指在上次执行了的本例程的步骤705中由cpu取得的车辆10的当前位置。并且,本次当前位置是指在本次步骤705中由cpu取得的车辆10的当前位置。
[0125]
在ecu30的rom中预先存储有表示车辆10中的gnss接收器的搭载位置与各车轮11的位置的关系的位置关系数据。由于从位置信息取得装置33取得的车辆10的当前位置相当于gnss接收器的搭载位置,所以cpu通过参照车辆10的当前位置、车辆10的行进方向td以及上述位置关系数据来确定各车轮11的当前位置。并且,位置信息取得装置33接收的gnss信号包括与移动速度相关的信息,cpu基于gnss信号来确定车速v1。
[0126]
步骤710:cpu如以下描述那样确定前轮移动预测路线以及后轮移动预测路线。前轮移动预测路线是被预测为前轮11f此后进行移动的路线,后轮移动预测路线是被预测为后轮11r此后进行移动的路线。作为一个例子,cpu基于各车轮11的当前位置、车辆10的行进方向td以及上述位置关系数据来确定前轮移动预测路线以及后轮移动预测路线。
[0127]
步骤715:如上所述,cpu通过将前轮预测时间tpf与车速v相乘来运算前轮预测距离lpf,并且通过将后轮预测时间tpr与车速v1相乘来运算后轮预测距离lpr。
[0128]
步骤720:cpu确定前轮预测通过位置pf1以及后轮预测通过位置pr1。更详细而言,cpu将前轮11f从该当前位置沿着前轮移动预测路线前进了前轮预测距离lpf的位置确定为前轮预测通过位置pf1。并且,cpu将后轮11r从该当前位置沿着后轮移动预测路线前进了后轮预测距离lpr的位置确定为后轮预测通过位置pr1。
[0129]
步骤725:cpu从根据云40的预演参照数据45预先取得的后述的“准备区间中的簧下位移z
1”取得前轮预测通过位置pf1的簧下位移z1以及后轮预测通过位置pr1的簧下位移z1。存在在步骤725中取得的簧下位移z1被称为“预演状态量”的情况。
[0130]
步骤730:cpu通过将前轮预测通过位置pf1的簧下位移z1应用于上述式(12)并且将后轮预测通过位置pr1的簧下位移z1应用于式(13)来预算对于各主动促动器17的目标控制力fct。
[0131]
步骤735:cpu将包括目标控制力fct的控制指令分别发送至主动促动器17。
[0132]
步骤740:在前轮预测通过位置pf1达到了准备区间的终点的靠前规定距离的位置的情况下,cpu从云40的预演参照数据45取得以前轮预测通过位置pf1为起点的准备区间中的“簧下位移z1以及位置信息”,并将所取得的簧下位移z1以及位置信息储存于ram。其中,准备区间是以到达了准备区间的终点时的前轮预测通过位置pf1为起点、以从该前轮预测通过位置pf1起沿着前轮移动预测路线离开了规定的准备距离的位置为终点的区间。并且,准备距离被预先决定为充分大于上述前轮预测距离lpf的值。
[0133]
对步骤740中的处理详细地进行说明。cpu将包括准备区间的位置信息的取得请求从无线通信装置34发送至管理服务器42。管理服务器42从预演参照数据45取得与取得请求所包括的准备区间的位置信息建立了关联的簧下位移z1以及位置信息,并将所取得的簧下位移z1以及位置信息发送至减振控制装置20。若减振控制装置20接收到位置信息以及簧下位移z1,则cpu将接收到的位置信息以及簧下位移z1储存于ram。
[0134]
根据以上可知,减振控制装置20基于预演参照数据45所包括的簧下位移z1来进行预演减振控制。由于簧下位移z1与路面位移z0相比,相对于实际的路面55的位移的精度良好,所以减振控制装置20能够实现预演减振控制的减振性能的提高。
[0135]
<簧下位移收集例程>
[0136]
每当经过规定时间,ecu30的cpu便执行图8中用流程图所示的簧下位移收集例程。此外,按照各个车轮的每一个来执行该例程。
[0137]
因此,若成为规定的时机,则cpu从图8的步骤800开始处理并依次执行步骤805~步骤845,然后进入至步骤895而暂时结束本例程。
[0138]
步骤805:cpu从上下加速度传感器31取得簧上加速度ddz2。
[0139]
步骤810:cpu通过对在步骤805中取得的簧上加速度ddz2进行2阶积分来运算簧上位移z2。
[0140]
步骤815:cpu从行程传感器32取得行程h。其中,行程h是车轮11的位置的上下方向的悬架行程,与从车轮11的位置处的簧上位移z2减去车轮11的位置处的簧下位移z1而得的值相当。
[0141]
步骤825:cpu通过从簧上位移z2减去行程h来运算簧下位移z1。
[0142]
步骤830:cpu从位置信息取得装置33取得与车辆10的当前位置相关的信息。
[0143]
步骤835:与步骤705同样,cpu基于上次当前位置以及本次当前位置来确定车辆10的行进方向td。
[0144]
步骤840:cpu参照行进方向td以及位置关系数据,基于车辆10的当前位置来确定各车轮11的当前位置。
[0145]
步骤845:cpu将簧下位移z1以及车轮11的当前位置(位置信息)分别与当前时刻建立关联(建立联系),并存储于存储装置30a。此外,cpu也可以将簧下位移z1以及车轮11的当前位置建立关联(形成为组)并存储于存储装置30a。
[0146]
<收集数据发送>
[0147]
每当经过规定时间,ecu30的cpu便执行图9中用流程图所示的收集数据发送例程。
[0148]
因此,若成为规定的时机,则cpu从图9的步骤900开始处理,依次执行步骤905以及步骤910。
[0149]
步骤905:cpu对发送计时器ts的值加“1”。发送计时器ts是用于对从收集数据上次被发送至云40的时刻(以下,称为“上次发送时刻”)起经过的时间进行计量的计时器。
[0150]
步骤910:cpu对发送计时器ts的值是否为阈值tsth(正的常量)以上进行判定。在发送计时器ts的值小于阈值tsth的情况下,cpu在步骤910中判定为“否”,进入至步骤995而暂时结束本例程。另一方面,在发送计时器ts的值为阈值tsth以上的情况下,cpu在步骤910中判定为“是”,依次执行步骤915~步骤925。然后,cpu进入至步骤995而暂时结束本例程。
[0151]
步骤915:cpu基于时刻信息将尚未发送的簧下位移z1与位置信息建立关联。其中,在簧下位移z1以及车轮11的当前位置被建立关联并存储的情况下,cpu仅读出它们。
[0152]
步骤920:cpu将在步骤915中建立了关联的簧下位移z1以及位置信息作为收集数据发送至云40。
[0153]
步骤925:cpu将发送计时器ts的值设定为“0”。
[0154]
其中,云40的管理服务器42若接收到在步骤920中发送的收集数据,则将收集数据写入至“存储于存储装置44的预演参照数据45”。当在预演参照数据45已经写入有位置信息相同的簧下位移z1的情况下,管理服务器42利用新接收到的收集数据所包括的簧下位移z1覆盖已经写入的簧下位移z1。但是,管理服务器42也可以计算已经写入的簧下位移z1与新接
收到的收集数据所包括的簧下位移z1的平均值或者加权平均值作为新的簧下位移z1,并将该计算出的新的簧下位移z1作为预演参照数据45写入。
[0155]
根据以上可知,由于使用基于簧下位移z1运算出的目标控制力fct来执行预演减振控制,所以与使用基于路面位移z0运算出的目标控制力fct执行的预演减振控制相比,能够适当地减少簧上51的振动,能够使预演减振控制的减振性能提高。并且,基于由上下加速度传感器31检测到的簧上加速度ddz2来取得预演参照数据45所包括的簧下位移z1。换言之,基于车辆10实际在路面行驶时因上述路面的位移而实际沿上下方向位移的簧上51的加速度(簧上加速度ddz2)来取得簧下位移z1。因此,与基于预演传感器所取得的传感检测数据而取得的路面位移z0相比,预演参照数据45所包括的簧下位移z1包括误差的可能性低。因此,能够使预演减振控制的减振性能提高。
[0156]
(第1变形例)
[0157]
由于存在上述的簧下位移z1如以下描述的那样包括误差的可能性,所以第1变形例仅在以误差变小的方式求出簧下位移z1、并将该簧下位移z1作为预演参照数据45进行保存的点上与第1装置不同。以下,对簧下位移z1所包括的误差进行说明。
[0158]
现在,将以“车辆10以某一车速v1a行驶时的实际的路面位移z
0”为输入、以“车辆10在上述规定区间的路面行驶时所取得的簧下位移z
1”为输出的情况下的它们之间的传递函数定义为传递函数(z1/z0)。图10的图表表示该传递函数的频率特性。即,图10表示传递函数(z1/z0)相对于因路面位移z0而在簧下50产生的振动的频率f(hz)的大小(增益)。
[0159]
根据图10所示的图表,频率f越小于“比车辆10的簧上共振频率fsr小的某个频率fa”,则上述传递函数(z1/z0)的大小从“1”起越逐渐变大。
[0160]
可认为这是因上下加速度传感器31中的传感器漂移(零点的时间变动)而引起的。更具体而言,由上下加速度传感器31检测的簧上加速度ddz2因在上下加速度传感器31产生的传感器漂移而在频率fa以下的低频率区域包括相对大的误差。因此,在使用对簧上加速度ddz2进行了2阶积分而得的值(即,簧上位移z2)来运算簧下位移z1的情况下,由于在低频率区域中簧上加速度ddz2包括上述传感器漂移误差,所以导致簧下位移z1包括相对大的误差。
[0161]
并且,根据图10所示的图表,若频率f增大至“比簧上共振频率fsr大的某个频率fb”,则簧下50开始共振,在频率f与“比频率fb大的车辆10的簧下共振频率fur”一致的情况下,簧下50的共振最大。因此,在频率fb至簧下共振频率fur为止的范围内频率f越大,则上述传递函数(z1/z0)的大小逐渐变得越大于“1”。并且,频率f越大于簧下共振频率fur,则上述传递函数(z1/z0)的大小逐渐变得越小。这样,在比频率fb大的高频率区域中,簧下位移z1与实际的路面位移z0的相关性降低。
[0162]
其中,无论车辆的种类以及车速如何,上述频率fa均是比各车辆的簧上共振频率fsr小的值,上述频率fb均是比各车辆的簧上共振频率fsr大且比簧下共振频率fur小的值。并且,无论车辆的种类以及车速如何,均是频率f越小于频率fa则传递函数(z1/z0)的大小逐渐变得越大,在频率fb至簧下共振频率fur为止的范围内,均是频率f越大则传递函数(z1/z0)的大小逐渐变得越大。
[0163]
鉴于以上的点,第1变形例如以下所述那样计算上述簧下位移z1,以便ecu30计算且作为预演参照数据45而被储存的簧下位移z1尽量不受到上下加速度传感器31中的传感
器漂移的影响以及簧下50的共振的影响。
[0164]
若更具体叙述,则ecu30将相对于对从上下加速度传感器31获得的簧上加速度ddz2进行了2阶积分而得的值的时间序列变化实施了“仅使特定的频率区域的频率成分通过的带通滤波处理”而得的值作为“簧上位移z
2”使用。并且,ecu30将对于从行程传感器32获得的行程h的时间序列变化实施了“仅使特定的频率区域的频率成分通过的带通滤波处理”而得的值作为“行程h”使用。特定的频率区域是“比频率fa小的第1截止频率f1cut”至“频率fb(以下,称为“第2截止频率f2cut”)”为止的区域。而且,ecu30通过从上述“簧上位移z
2”减去上述“行程h”来运算簧下位移z1。
[0165]
由此,能够将不受因上下加速度传感器31的传感器漂移引起的误差的影响且不受因簧下50的共振引起的误差的影响的、精度良好的簧下位移z1保存为预演参照数据45。因此,由于在预演减振控制中使用该精度良好的簧下位移z1,所以能够使预演减振控制的减振性能提高。
[0166]
其中,由于上述频率fa小于簧上共振频率fsr,所以第1截止频率f1cut小于簧上共振频率fsr。因此,在预演参照数据45中可靠地反映了频率f为簧上共振频率fsr的情况下的簧下位移z1。另一方面,当假设在预演参照数据45中未反映频率f为簧上共振频率fsr的情况下的簧下位移z1的情况下,即便基于这样的簧下位移z1进行了上述的预演减振控制,簧上51也共振。另一方面,根据第1变形例,由于在预演参照数据45中反应了频率f为簧上共振频率fsr的情况下的簧下位移z1,所以通过预演减振控制能够可靠地减少簧上51的共振。
[0167]
每当经过规定时间,第1变形例的ecu30的cpu便执行图11所示的簧下位移收集例程来代替图8所示的簧下位移收集例程。此外,对图11所示的步骤中的进行与图8所示的步骤相同的处理的步骤标注与在图8中使用的附图标记相同的附图标记并省略说明。
[0168]
因此,若成为规定的时机,则cpu从图11所示的步骤1100开始处理并执行图11所示的步骤805以及步骤810,进入至步骤1105。其中,cpu将在图11所示的步骤810中取得的“簧上加速度ddz2的2阶积分值亦即簧上位移z
2”预先存储于ram。
[0169]
在步骤1105中,cpu从存储于ram的簧上位移z2取得“后述的带通滤波处理所需的数量的簧上位移z
2”作为取样位移z2,并对于该取样位移z2执行带通滤波(bpf)处理。其中,cpu按照存储于ram的次序从新到旧的顺序来取得上述所需的数量的簧上位移z2作为取样位移z2。因此,取样位移z2包括本次在图11所示的步骤810中取得的簧上位移z2。带通滤波处理是仅使取样位移z2的第1截止频率f1cut以上且第2截止频率f2cut以下的特定频率成分通过的处理。换言之,上述带通滤波处理是将簧上位移z2的小于第1截止频率f1cut的频率成分以及比第2截止频率f2cut大的频率成分除去的处理。cpu通过执行上述带通滤波处理来提取特定的频率区域的取样位移z2。并且,cpu从执行过带通滤波处理的取样位移z2提取与本次在图11所示的步骤810中取得的簧上位移z2对应的簧上位移z2作为“本次簧上位移z
2”。
[0170]
cpu在步骤1105的执行后执行图11所示的步骤815,并进入至步骤1110。其中,cpu将在图11所示的步骤815中取得的行程h预先存储于ram。
[0171]
在步骤1110中,cpu从存储于ram的行程h取得“后述的带通滤波处理所需的数量的行程h”作为取样行程h,并对于该取样行程h执行上述带通滤波处理。其中,cpu按照存储于ram的次序从新到旧的顺序取得上述所需的数量的行程h作为取样行程h。因此,取样行程h
包括本次在图11所示的步骤815中取得的行程h。cpu通过执行上述带通滤波处理来提取上述特定的频率区域的行程h。换言之,cpu将取样行程h的小于第1截止频率f1cut的频率成分以及比第2截止频率f2cut大的频率成分除去。并且,cpu从执行过带通滤波处理的取样行程h提取与本次在图11所示的步骤815中取得的行程h对应的行程h作为“本次行程h”。
[0172]
然后,cpu通过在图11所示的步骤825中从上述本次簧上位移z2减去上述本次行程h来取得簧下位移z1。然后,cpu执行图11所示的步骤830~845,进入至步骤1195而暂时结束本例程。
[0173]
因此,由于在图11所示的步骤825中基于上述特定的频率区域的“簧上位移z2以及行程h”来运算簧下位移z1,所以能够从上述簧下位移z1除去“小于第1截止频率f1cut的频率成分”以及“比第2截止频率f2cut大的频率成分”。
[0174]
此外,cpu可以基于对上下加速度传感器31取得的簧上加速度ddz2进行了2阶积分而得的簧上位移z2与行程传感器32取得的行程h来运算簧下位移z1,并对于包括运算出的簧下位移z1的带通滤波处理所需的数量的簧下位移z1执行上述带通滤波处理。
[0175]
只要通过执行上述带通滤波处理直至由减振控制装置20运算出的簧下位移z1被储存为预演参照数据45为止由此从上述簧下位移z1除去小于第1截止频率f1cut的频率成分以及比第2截止频率f2cut大的频率成分即可。例如,管理服务器42可以执行上述带通滤波处理,以下对该例子进行说明。
[0176]
上述ecu30的cpu执行图8所示的例程来代替图11所示的例程。并且,若在图9所示的收集数据发送例程的步骤910中判定为“是”,则cpu不执行步骤915地进入至步骤920。在该步骤920中,cpu将车辆10的唯一的识别码亦即车辆id、时刻信息、与上述时刻信息建立了关联的“簧下位移z1以及位置信息”作为收集数据发送至云40。管理服务器42在接收到上述收集数据的情况下,基于相同的车辆id的收集数据所包括的时刻信息以及簧下位移z1来对于簧下位移z1执行上述带通滤波处理。而且,管理服务器42基于时刻信息来将执行过上述带通滤波处理的簧下位移z1与位置信息建立关联并登记于预演参照数据45。其中,管理服务器使用与根据车辆id识别的车辆的每个种类对应的第1截止频率f1cut以及第2截止频率f2cut来执行上述带通滤波处理。与车辆的每个种类对应的第1截止频率f1cut被预先设定为比上述种类的车辆的簧上共振频率fsr小的值,与车辆的每个种类对应的第2截止频率f2cut被预先设定为上述种类的车辆的簧上共振频率fsr与上述种类的车辆的簧下共振频率fur之间的值。
[0177]
根据以上的例子可知,从预演参照数据45所包括的簧下位移z1除去了小于第1截止频率f1cut的频率成分。因此,由于包括因传感器漂移引起的误差的可能性高的低频率区域中的簧下位移z1在预演减振控制中不被使用,所以能够使预演减振控制的减振性能提高,能够减少因预演减振控制而导致簧上51被激振的可能性。并且,从预演参照数据45所包括的簧下位移z1除去了比第2截止频率f2cut大的频率成分。因此,由于因簧下50的共振引起的误差大的高频率区域中的簧下位移z1在预演减振控制中不被使用,所以能够使预演减振控制的减振性能提高,能够减少因预演减振控制而导致簧上51被激振的可能性。
[0178]
此外,第2截止频率f2cut只要是比簧上共振频率fsr大且比簧下共振频率fur小的值即可,可以被设定为与上述频率fb不同的值。
[0179]
并且,cpu(或者管理服务器42)也可以执行“将簧下位移z1的小于第1截止频率的
频率成分除去的高通滤波处理”以及“将簧下位移z1的比第2截止频率大的频率数成分除去的低通滤波处理”中的任一方来代替上述带通滤波处理。其结果是,储存被实施了上述高通滤波处理以及上述低通滤波处理的任一方之后的簧下位移z1作为预演参照数据45。
[0180]
(第2变形例)
[0181]
在第2变形例中,将未被实施滤波处理的簧下位移z1作为预演参照数据45储存。并且,第2变形例的预演参照数据45将位置信息、上述位置信息所表示的位置处的簧下位移z1、以及在上述位置行驶时的车速v1建立关联。在第2变形例中,ecu30从云40取得包括预测通过位置的取样区间中的多个“簧下位移z1、车速v1以及位置信息”。
[0182]
并且,ecu30基于所取得的取样区间中的多个车速v1来运算在取样区间行驶时的车辆10的平均车速v1ave。而且,ecu30对车辆10以上述平均车速v1ave在取样区间行驶时的上述取样区间中的簧下位移z1(以下,称为“取样位移z
1”)的时间序列变化进行运算。而且,ecu30通过对于取样位移z1的时间序列变化实施将比规定的判别阈值频率fde大的频率成分除去的低通滤波处理来取得取样区间中的“低频侧簧下位移z
1”。判别阈值频率fde被预先设定为车辆10的簧上共振频率fsr以上且车辆10的簧下共振频率fur以下的范围的规定的值(参照图10)。而且,第2变形例使用该取样区间中的“低频侧簧下位移z
1”来取得预测通过位置的簧下位移z1作为“低频侧位移z1lo”。
[0183]
并且,第2变形例通过对于上述取样位移的时间序列变化实施将判别阈值频率fde以下的频率成分除去的高通滤波处理来取得取样区间中的“高频侧簧下位移z
1”。而且,第2变形例使用该取样区间中的“高频侧簧下位移z
1”来取得预测通过位置的簧下位移z1作为“高频侧位移z1hi”。
[0184]
接下来,第2变形例根据以下的式(14)来运算目标控制力fct。fct=β
lo
×
z1lo β
hi
×
z1hi
…
式(14)
[0185]
即,第2变形例的减振控制装置20通过将低频侧位移z1lo与规定的低频侧增益β
lo
(正的常量)相乘来运算低频侧目标控制力fctlo。并且,减振控制装置20通过将高频侧位移z1hi与规定的高频侧增益β
hi
(正的常量)相乘来运算高频侧目标控制力fcthi。减振控制装置20通过将低频侧目标控制力fctlo与高频侧目标控制力fcthi相加来运算目标控制力fct。其中,高频侧增益β
hi
被预先设定为比低频侧增益β
lo
大的值。
[0186]
上下加速度传感器31所检测的比上述判别阈值频率fde大的高频侧的频率区域的簧上加速度ddz2与上述判别阈值频率fde以下的低频侧的频率区域的簧上加速度ddz2相比,比相对于实际的路面位移z0的簧上加速度ddz2小的可能性高。作为其原因,可考虑以下三个。
[0187]
·
上下加速度传感器31在高频侧的频率区域中的传感器增益小于在低频侧的频率区域中的传感器增益。
[0188]
·
轮胎的挠曲的影响。
[0189]
·
存在表示高频侧的簧上加速度ddz2的信号缺失的可能性。
[0190]
可认为这是因上下加速度传感器31的输出值的高频区域的变化速度相对于上下加速度传感器31的输出值的取样周期大而引起的。此外,在行程传感器32中也产生与上下加速度传感器31相同的现象。
[0191]
因此,基于簧上加速度ddz2取得的高频侧的频率区域的簧下位移z1与低频侧的频
率区域的簧下位移z1相比,比相对于实际的路面位移z0的簧下位移z1小的可能性高。
[0192]
鉴于该点,在第2变形例中,高频侧增益β
hi
被设定为低频侧增益β
lo
大的值。因此,能够减少与高频侧的频率区域中的簧下位移z1对应的目标控制力fct小于相对于实际的路面位移z0所需的控制力的可能性。因此,能够使预演减振控制的簧上51的减振性能提高。
[0193]
对第2变形例更详细地进行说明。上述式(12)中的增益βf以及上述式(13)中的增益βr被预先设定以便运算用于相对于实际的路面位移z0使簧上51减振的理想的目标控制力fct(以下,称为“理想控制力”)。存在这样的增益βf以及βr被称为“基准增益”的情况。在使用这样的基准增益来运算目标控制力fct的情况下,在高频侧的频率区域中,对于簧下位移z1的目标控制力fct比“对于实际的路面位移z0的理想控制力”小的可能性高。
[0194]
另一方面,在第2变形例中,前轮11f用的高频侧增益β
hi
被设定为比上述增益βf大的值,前轮11f用的低频侧增益β
lo
被设定为与上述增益βf相同的值。同样,在第2变形例中,后轮11r用的高频侧增益β
hi
被设定为比上述增益βr大的值,后轮11r用的低频侧增益β
lo
被设定为与上述增益βr相同的值。由此,能够减少因相对于高频侧的频率区域的簧下位移z1的目标控制力fct小于“相对于实际的路面位移z0的理想控制力”而导致目标控制力fct小于理想控制力的可能性。
[0195]
每当经过规定时间,第2变形例的ecu30的cpu便执行图12所示的预演减振控制例程来代替图7所示的预演减振控制例程。其中,在图12中,对进行与图7所示的步骤相同的处理的步骤标注与在图7中使用的附图标记相同的附图标记并省略说明。
[0196]
因此,若成为规定的时机,则cpu从图12所示的步骤1200开始处理并执行图12所示的步骤705~步骤720。然后,cpu执行步骤1205~步骤1220。
[0197]
步骤1205:cpu取得包括各预测通过位置的规定的取样区间中的多个簧下位移z1作为取样位移z1,并且取得上述取样区间中的多个车速v1。前轮11f的取样区间是以前轮11f的当前位置为起点、以从上述当前位置沿着前轮移动预测路线离开了规定的前轮取样距离的位置为终点的区间。其中,前轮取样距离是前轮预测距离lpf以上的值且被设定为足以取得后述的低通滤波处理以及后述的高通滤波处理所需的数量的簧下位移z1的值。同样,后轮11r的取样区间是以后轮11r的当前位置为起点、以从上述当前位置沿着后轮移动预测路线离开了规定的后轮取样距离的位置为终点的区间。其中,后轮取样距离是后轮预测距离lpr以上的值且被设定为足以取得后述的低通滤波处理以及后述的高通滤波处理所需的数量的簧下位移z1的值。此外,这些取样区间的起点也可以不是车轮11的当前位置,取样区间只要是包括预测通过位置的具有规定的距离的区间即可。例如,预测通过位置可以被设定为取样区间的起点。
[0198]
步骤1208:cpu基于取样区间的多个车速v1来运算平均车速v1ave,并运算以该平均车速v1ave在取样区间行驶时的取样位移z1的时间序列变化。
[0199]
步骤1210:cpu对于取样位移z1的时间序列变化执行“将截止频率作为判别阈值频率fde的低通滤波(lpf)处理”,从执行过低通滤波处理的取样位移z1取得预测通过位置处的簧下位移z1作为低频侧位移z1lo。
[0200]
步骤1215:cpu对于取样位移z1的时间序列变化执行“将截止频率作为判别阈值频率fde的高通滤波(hpf)处理”,从执行过高通滤波处理的取样位移z1取得预测通过位置处的簧下位移z1作为高频侧位移z1hi。
[0201]
步骤1220:cpu通过将上述低频侧位移z1lo以及上述高频侧位移z1hi应用于上述式(14)来取得目标控制力fct。其中,如上所述,前轮11f用的低频侧增益β
lo
以及后轮11r用的低频侧增益β
lo
被预先设定,前轮11f用的高频侧增益β
hi
以及后轮11r用的高频侧增益β
hi
被预先设定。
[0202]
然后,执行图12所示的步骤735以及步骤740,进入至步骤1295而暂时结束本例程。
[0203]
从以上的例子可知,高频侧增益β
hi
被预先设定为比低频侧增益β
lo
大的值。由此,在高频侧的频率区域中,能够减少相对于簧下位移z1的目标控制力fct小于“相对于实际的路面位移z0的理想控制力”的可能性。因此,能够使预演减振控制的簧上51的减振性能提高。
[0204]
此外,作为预演参照数据45,也可以将位置信息与“实施了上述低通滤波处理之后的簧下位移z1以及实施了上述高通滤波处理之后的簧下位移z
1”建立关联并储存。该情况下,在图12所示的例程中,cpu在步骤1205中取得预测通过位置的被实施了上述低通滤波处理之后的簧下位移z1作为低频侧位移z1lo,取得预测通过位置的被实施了上述高通滤波处理之后的簧下位移z1作为高频侧位移z1hi。然后,cpu进入至步骤1220而不执行步骤1208、步骤1210以及步骤1215。并且,在图8所示的例程中,cpu在基于簧上加速度ddz2运算簧下位移z1时,基于本次的簧下位移z1与上述低通滤波处理所需的数量的紧前的簧下位移z1来执行低通滤波处理,并基于本次的簧下位移z1与上述高通滤波处理所需的数量的紧前的簧下位移z1来执行高通滤波处理。而且,在图9所示的例程中,cpu将被实施了上述低通滤波处理之后的本次的簧下位移z1以及被实施了上述高通滤波处理的本次的簧下位移z1与位置信息建立关联并发送至云40。由此,保存被实施了上述低通滤波处理之后的簧下位移z1以及被实施了上述高通滤波处理之后的簧下位移z1作为预演参照数据45。
[0205]
并且,在本变形例被应用于上述第1变形例的情况下,判别阈值频率fde被预先设定为车辆10的簧上共振频率fsr以上且第2截止频率f2cut以下的范围的规定的值。
[0206]
本发明并不限定于上述实施方式以及上述变形例,在本发明的范围内能够采用各种变形例。
[0207]
也可以收集车辆10以外的测量专用车辆(一般车辆)实际在路面行驶时的簧下位移z1以及各车轮的当前位置(位置信息),并将收集到的“簧下位移z1以及位置信息”作为收集数据发送至云40。该情况下,车辆10的减振控制装置20可以不执行图8以及图9所示的例程。其中,测量车辆具备图3所示的上下加速度传感器31fr~31rl、行程传感器32fr~32rl、位置信息取得装置33、无线通信装置34、以及存储装置30a,并执行图8以及图9所示的例程。
[0208]
这样的测量专用车辆将收集数据依次发送至云40,云40基于收集数据来更新预演参照数据45。由此,由于相对于最新的路面的簧下位移z1被存储于预演参照数据45,所以减振控制装置20能够对于最新的路面的状况执行恰当的预演减振控制。
[0209]
在将第1变形例应用于这样的测量专用车辆的情况下,上述测量专用车辆将执行过上述带通滤波处理的簧下位移z1作为收集数据发送至云40。该带通滤波处理的第1截止频率f1cut被设定为比上述测量专用车辆的簧上共振频率fsr小的值,并且第2截止频率f2cut被设定为上述测量专用车辆的簧上共振频率fsr与上述测量专用车辆的簧下共振频率fur之间的值。
[0210]
在将第2变形例应用于这样的测量专用车辆的情况下,上述测量专用车辆将簧下
位移z1、取得上述簧下位移z1时的车速v1、以及位置信息建立关联而得的收集数据发送至管理服务器42。该情况下,在第2变形例应用于第1变形例的情况下,判别阈值频率fde被预先设定为上述测量专用车辆的簧上共振频率fsr以上且上述第2截止频率f2cut以下的范围的规定的值。
[0211]
预演参照数据45不需要被存储于云40的存储装置44,可以存储于存储装置30a。该情况下,cpu只要将收集数据直接存储于存储装置30a即可,不需要将收集数据发送至云40。
[0212]
并且,在预先决定了车辆10的行驶路线的情况下,cpu可以在车辆10开始行驶路线的行驶之前预先从云40下载上述行驶路径的预演参照数据45,并存储于存储装置30a。
[0213]
在预演参照数据45中,可以代替簧下位移z1而将簧下速度dz1与位置信息建立关联并储存。该情况下,在图7所示的步骤725中,cpu取得簧下速度dz1,通过对所取得的簧下速度dz1进行积分来运算簧下位移z1。而且,在图7所示的步骤730中,cpu基于该簧下位移z1来运算目标控制力fct。并且,在图8所示的步骤825中,cpu通过对簧下位移z1进行微分来运算簧下速度dz1。然后,在步骤845中,cpu将簧下速度dz1以及位置信息分别与当前时刻建立关联并存储于存储装置30a。然后,在图9所示的例程中,cpu代替簧下位移z1而将簧下速度dz1与位置信息建立关联并发送至云40。此外,簧下速度dz1的运算方法能够应用各种方法。例如,cpu可以通过对簧上加速度ddz2进行1阶积分来运算簧上速度dz2,通过对行程量进行微分来运算行程速度(dz2-dz1),通过从簧上速度dz2减去行程速度(dz2-dz1)来运算簧下速度dz1。
[0214]
并且,在预演参照数据45中,可以将簧下位移z1以及簧下速度dz1与位置信息建立关联并存储。该情况下,cpu使用式(10)来运算目标控制力fct。
[0215]
也存在将被存储于预演参照数据45的“簧下位移z1以及/或者簧下速度dz
1”称为“簧下状态量”的情况。
[0216]
簧下位移z1的运算处理并不限定于在图8所示的步骤825中说明的处理,例如也可以是以下描述的例子(第1例以及第2例)那样的处理。
[0217]
对第1例进行说明。本例的减振控制装置20具备用于检测各车轮11fr~11rl的位置的簧下50的上下加速度(簧下加速度ddz1fr~ddz1rl)的簧下上下加速度传感器。cpu通过对簧下加速度ddz1fr~ddz1rl进行2阶积分来取得簧下位移z1。
[0218]
对第2例进行说明。本例的减振控制装置20基于簧上加速度ddz2fr~ddz2rl、簧下加速度ddz1fr~ddz1rl以及行程传感器32fr~32rl检测出的行程hfl~hrr中的任意一个,使用观测器(observer,未图示)来推断簧下位移z1。
[0219]
上下加速度传感器31只要与至少三个车轮对应设置即可。与未被设置上下加速度传感器31的车轮对应的簧上加速度能够基于由三个上下加速度传感器31检测出的簧上加速度来推断。
[0220]
后轮11r的目标控制力fcrt的运算处理并不限定于上述例子。例如,cpu可以在当前时刻tp基于前轮11f的当前位置的簧下位移z1来运算目标控制力fcrt,在从当前时刻tp延迟了时间(l/v-tpr)的时机将包括上述目标控制力fcrt的控制指令发送至后轮主动促动器17r。即,cpu可以在后轮11r到达了比前轮11f的当前位置靠前后轮预测距离lpr的地点的时机将包括目标控制力fcrt的控制指令发送至后轮主动促动器17r。此外,前轮11f的当前位置的簧下位移z1可以从预演参照数据45取得,也可以基于与前轮11f的位置对应的簧
上加速度ddz2或者簧下加速度ddz1来取得。
[0221]
接下来,对另一方法进行说明。cpu与前轮移动预测路线独立地基于后轮11r的当前位置、车辆10的行进方向td以及位置关系数据来确定后轮移动预测路线,将沿着后轮移动预测路线离开了后轮预测距离lpr的位置确定为后轮预测通过位置。而且,cpu取得后轮预测通过位置的簧下位移z1,并基于所取得的簧下位移z1来运算后轮11r的目标控制力fcrt。
[0222]
基于gnss接收器所取得的车辆10的当前位置取得了车速v1以及行进方向td,但并不限定于此。例如,减振控制装置20具备未图示的“车轮速传感器以及横摆率传感器”。车轮速传感器检测车轮11的旋转速度,cpu可以基于车轮11的旋转速度来运算车速v1。传感器检测作用于车辆10的横摆率。cpu可以基于横摆率以及车速v1来取得行进方向td。
[0223]
悬架13fr~13rl只要分别允许车轮11fr~11rl以及车身10a相互相对于另一方沿上下方向位移即可,可以是任何类型的悬架。并且,悬架弹簧16fr~16rl可以是压缩螺旋弹簧、空气弹簧等任意的弹簧。
[0224]
在上述实施方式中,与各车轮11对应地设置了主动促动器17fr~17rl,但只要在至少一个车轮11设置有一个主动促动器17即可。例如,车辆10可以仅具备前轮主动促动器17f以及后轮主动促动器17r中的任一方。
[0225]
在上述实施方式以及上述变形例中,使用主动促动器17作为控制力产生装置,但并不限定于此。即,控制力产生装置只要是能够基于包括目标控制力的控制指令可调整地产生用于对簧上51进行减振的上下方向的控制力的促动器即可。
[0226]
并且,控制力产生装置也可以是主动稳定器装置(active stabilizer device,未图示)。主动稳定器装置包括前轮主动稳定器以及后轮主动稳定器。若在与左前轮11fl对应的簧上51与簧下50之间产生上下方向的控制力(左前轮控制力),则前轮主动稳定器在与右前轮11fr对应的簧上51与簧下50之间产生和左前轮控制力反向的控制力(右前轮控制力)。同样,若在与左后轮11rl对应的簧上51与簧下50之间产生上下方向的控制力(左后轮控制力),则后轮主动稳定器在与右后轮11rr对应的簧上51与簧下50之间产生和左后轮控制力反向的控制力(右后轮控制力)。上述主动稳定器装置的结构通过参照日本特开2009-96366号公报而被引入至本技术说明书。此外,主动稳定器装置只要包括前轮主动稳定器以及后轮主动稳定器的至少一方即可。
[0227]
控制力产生装置也可以是通过对车辆10的各车轮11增减制驱动力来利用悬架13fr~13rl的几何形状(geometry)产生上下方向的控制力fc的装置。这样的装置的结构通过参照日本特开2016-107778号公报等而被引入至本技术说明书。ecu30通过相关技术的手法来运算产生与目标控制力fct对应的控制力fc的制动/驱动力。并且,这样的装置包括对各车轮11施加驱动力的驱动装置(例如轮内马达)和对各车轮11施加制动力的制动装置(制动器装置)。此外,驱动装置可以是对前轮以及后轮的任一方或者四轮施加驱动力的马达或者发动机等。并且,上述控制力产生装置只要包括驱动装置以及制动装置中的至少一方即可。
[0228]
并且,控制力产生装置也可以是衰减力可变式的减震器15fr~15rl。该情况下,ecu30控制减震器15fr~15rl的衰减系数c以使减震器15fr~15rl的衰减力变化与目标控制力fct对应的值。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。