1.本实用新型涉及智能防滑旋耕机器人,属于农业机械技术领域。
背景技术:
2.旋耕机是农业机械中保有量最多,使用率最高的机器之一,传统的旋耕机是与拖拉机配套完成耕、耙作业的耕耘机械,需要人来驾驶操控,作业效率不高。如打滑或遇到硬质土地时没有其他动力源,摆脱不了困境,从而影响旋耕机的使用寿命和工作效率。
技术实现要素:
3.本实用新型的目的在于提供一种智能防滑旋耕机器人,用于实现无人化旋耕土地,防止旋耕机打滑,去除土地中铁杂质,增加土壤通气性。
4.实现上述目的,本实用新型采取下述技术方案:
5.一种智能防滑旋耕机器人,包括牵引动力装置、旋耕农具装置及液压驱动装置;所述牵引动力装置通过牵引架牵引旋耕农具装置,所述液压驱动装置安装在牵引动力装置底部,旋耕农具装置用于执行旋耕土地,
6.所述牵引动力装置包括壳体、履带、锂电池组、驱动电机及多个传感器;所述壳体左右两侧安装有履带,所述锂电池组、驱动电机均设置在壳体内,所述驱动电机为履带提供驱动力,所述锂电池组为驱动电机提供电力支持,所述多个传感器安装在壳体上,所述壳体外侧安装有牵引架;
7.所述旋耕农具装置包括旋耕组件、外壳、旋耕电机
·
及两个磁铁条;所述外壳通过牵引架安装在壳体的后方,所述旋耕组件转动安装在外壳上,安装在外壳上的旋耕电机为旋耕组件提供驱动力,所述两个磁铁条均设置在旋耕组件上方,且对称固定在的外壳内侧;
8.所述液压驱动装置包括液压油缸、轴座、支撑柱;所述液压油缸的固定端安装在壳体的后端底面上,所述轴座安装在液压油缸的伸缩杆外端上,所述支撑柱上端通过铰轴与轴座铰接,支撑柱下端朝向地面设置。
9.本实用新型的有益效果在于:
10.本实用新型用于实现无人化旋耕土地,防止旋耕机打滑,能够产生向前的推力,来应对发生打滑或旋耕到硬质土地的特殊情况,使智能防滑旋耕机器人继续工作。可以吸取土地中残留的金属如铁钉等,保证其他农机设备进入田地的安全运行,去除土地中铁杂质使土地干净农作物生长更旺盛,旋耕时刀具喷气增加土壤通气性利于秸秆腐烂。
附图说明
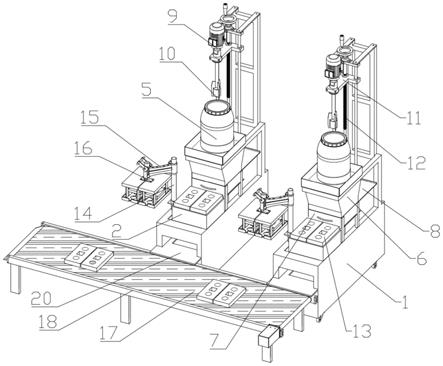
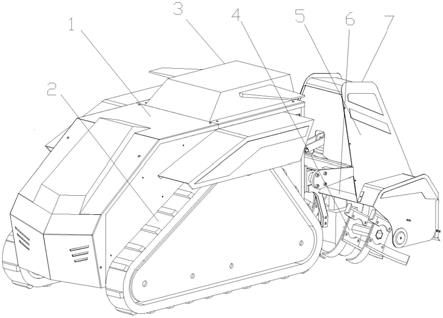
11.图1为本实用新型的整体结构示意图;
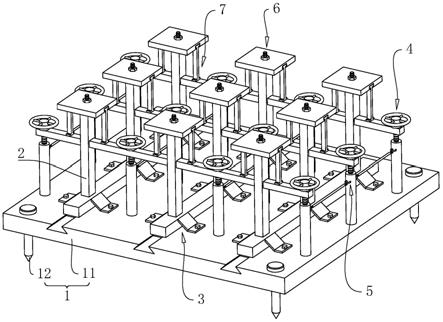
12.图2为本实用新型的牵引动力装置部分结构示意图;
13.图3为本实用新型的旋耕机部分结构示意图;
14.图4为本实用新型的液压推力装置启动时的部分结构示意图;
15.图5为本实用新型的液压推力装置关闭时的部分结构示意图;
16.图6为本实用新型的气泵装置的结构示意图;
17.图中标记说明:1、壳体;2、履带;3、牵引动力装置;4、旋耕组件;5、外壳;6、磁铁条;7、旋耕农具装置;8、液压电机;9、锂电池组;10、多个传感器;11、驱动电机;12、液压驱动装置;13、液压模块;14、底盘; 15、旋耕电机;121、液压油缸;122、耳板;123、轴座;124、轴;125、支撑柱;126、支撑爪;16、气泵;17、管;18、气动旋转接头;19、主轴;20、刀具;21、气孔;22、气泵装置。
具体实施方式
18.为了更好地了解本实用新型的目的、结构及功能,下面结合附图,对本实用新型一种智能防滑旋耕机器人做进一步详细的描述。
19.本实用新型涉及一种智能防滑旋耕机器人,如图1所示包括牵引动力装置3、旋耕农具装置7,牵引动力装置为旋耕机器人提供前进动力,旋耕农具装置用于旋耕反转土地。
20.如图5所示,本实用新型设有液压驱动装置12,从而产生向前的推力,来应对发生打滑或旋耕到硬质土地的特殊情况,使智能防滑旋耕机器人继续工作。
21.如图3所示,本实用新型设有磁铁条6,所述磁铁条能够吸取土地中残留的金属如铁钉等,保证其他农机设备进入田地的安全运行,使土地干净农作物生长更旺盛。
22.如图6所示,本实用新型设有气泵装置22,所述气泵装置22能够通过刀具20为土地内部喷射气体,从而增加土壤通气性,利于秸秆腐烂。
23.所述牵引动力装置3通过牵引架牵引旋耕农具装置7,所述液压驱动装置12安装在牵引动力装置3底部,旋耕农具装置7用于执行旋耕土地,
24.所述牵引动力装置3包括壳体1、履带2、锂电池组9、驱动电机11及多个传感器10;所述壳体1左右两侧安装有履带2,所述锂电池组9、驱动电机11均设置在壳体1内,所述驱动电机11为履带2提供驱动力,所述锂电池组9为驱动电机11提供电力支持,所述多个传感器10安装在壳体1上,所述壳体1外侧安装有牵引架;
25.所述旋耕农具装置7包括旋耕组件4、外壳5、旋耕电机15及两个磁铁条6;所述外壳5通过牵引架安装在壳体1的后方,所述旋耕组件4转动安装在外壳5上,安装在外壳5上的旋耕电机15为旋耕组件4提供驱动力,所述两个磁铁条6均设置在旋耕组件4上方,且对称固定在的外壳5内侧;
26.所述液压驱动装置12包括液压油缸121、轴座123、支撑柱125;所述液压油缸121的固定端安装在壳体1的后端底面上,所述轴座123安装在液压油缸121的伸缩杆外端上,所述支撑柱125上端通过铰轴与轴座123铰接,支撑柱125下端朝向地面设置;
27.所述轴座123包括两个间隙设置的耳板122,所述两个耳板122前端外弧面通过弧板封闭设置。用于限制支撑柱125的旋转方向,使支撑柱125只能绕铰轴124向后旋转,产生向前的推力,便于本设备向前移动。
28.所述支撑柱125末端设置有支撑爪126。
29.所述旋耕农具装置7包括液压电机8;所述牵引架两端分别通过转轴与壳体1和外壳5转动连接,所述液压电机8带动牵引架的前端绕对应的转轴转动,所述液压电机8为正反转电机。实现对旋耕农具装置升降的控制。液压电机设有两个电磁阀,通过控制电机启停及
两个电磁阀的切换,可实现升降控制,打开升或降的电磁阀,同时打开液压电机,既可实现旋耕农具装置的升降。
30.所述智能防滑旋耕机器人还包括气泵装置22,所述气泵装置22包括气泵16、管17及气动旋转接头18;所述气泵16固定安装在外壳5内部,旋耕组件4的上部,气泵16的出气口分别与两个管17连通,两个管17的另一端分别通过气动旋转接头18安装在旋耕组件4的主轴19上,旋耕组件4的主轴19与所有的刀具20均中空且连通设置,所有的刀具20的末端留有气孔 21,所述两个管17均为钢管。气泵16产生的气体通过管17、气动旋转接头 18、主轴19传递给所有的刀具20,然后从气孔21喷出。
31.外壳5由钣金件拼接而成,表面喷塑;
32.壳体1和外壳5上安装有前后灯;
33.控制部分主要包括航模遥控器、航模遥控接收器、控制单元。
34.所述遥控器:选择2.4g频段航模遥控器,有效遥控距离不小于110米。
35.航模遥控接收器用于接收航模遥控器的信号,并发送信号给控制单元;控制单元,用于控制牵引动力装置的驱动电机11、旋耕农具装置的旋耕电机 15、液压电机8;
36.控制单元,选用基于stm32f407系列的mcu,最大时钟频率169mhz,高达17个定时器、丰富的外设。
37.所述的锂电池组9:续航不小于2小时,选锂电池组49v 120ah,共5.29 度电,整车功率接近5.5kw。
38.配备了1个49v锂电池电量显示器,可直观了解当前机器人的电量状态。
39.所述驱动电机11:根据底盘及负载选49v,1.5kw
×
2。
40.所述旋耕电机15:根据旋耕机的耕幅、耕深选择49v1.5kw电机。
41.所述液压电机8:根据负载的重量及机械结构选择900w液压电机。
42.使用工作过程如下:在接到工作命令后,驱动电机11开启使履带2运转使旋耕机器人移动到起始地点,旋耕电机15开启使旋耕组件4旋转,液压电机8开启控制旋耕农具下移;利用卫星定位及差分定位技术,可对机器人达到厘米级定位,精确控制,无人驾驶系统内部算法可进行地图构建、自动路径规划,通过雷达扫描系统,实时构建地图,导入农田地图信息,自动规划工作路径,采用多传感器融合的机器人避障运动,通过雷达、超声波等传感器实现障碍物识别和避让。按照所规划路线,行走、转弯、耕地,移动至终点,工作完成后旋耕电机15关闭使旋耕组件4停止旋转,液压电机8开启控制旋耕农具上移至原位。
43.当智能防滑旋耕机器人发生打滑或旋耕到硬质土地时,底盘后下方的液压驱动装置12如图5所示启动,液压油缸121伸长,使支撑爪126接触地面,液压油缸继续伸长支撑柱125绕轴124向后旋转,从而产生向前的推力,使智能防滑旋耕机器人继续行驶工作。
44.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。