提供电路板组件底部填充物分配器的设备、系统和方法
1.相关申请的交叉引用
2.本技术要求于2019年1月4日提交的名称为“提供电路板组件底部填充物的分配器的设备、系统和方法”的美国临时申请62/788,511的优先权权益,其全部内容通过引用并入本文,如同其全部内容被阐述一样。
3.背景
技术领域
4.本发明涉及电路板制造,尤其涉及一种在电路板上提供底部填充物的设备、系统和方法。
背景技术:
5.在典型的印刷电路板生产过程中,必须执行许多步骤以完成目标板。简而言之,这些步骤通常包括将焊料放置在板上,与现有的印刷电路迹线相邻并沿着现有的印刷电路迹线;拾取电路组件并将其放置到焊料上,其中,作为示例,这些组件可以包括电阻器、电容器、电感器、晶体管、二极管、集成电路芯片等;回流,使得放置的板组件固定到印刷电路迹线并与其电气关联;以及所放置的组件的底部填充物,以便为组件提供机械支撑。
6.然而,底部填充物工艺对于较大的板而言具有增加的难度,并且最少是因为难以接近大板上的组件以底部填充物那些组件,并且还因为在大多数工艺中底部填充物是毛细管作用的结果,在存在热的情况下底部填充物通过毛细管作用在组件下方流动。在通过底部填充物交联之前,没有已知的方法可以将这种热一致地施加到大的板,特别是对于具有奇怪形状的大的板。也没有已知的方法可以防止底部填充物腔室内的热污染引起底部填充物在仍然位于底部填充物分配器内时交联。在通过底部填充物交联时,底部填充物将不再通过所提及的毛细管作用移动到组件下方的空的空间中,并且如果在底部填充物仍然在分配器内时发生交联,则发生堵塞,使得不能适当地分配底部填充物。
技术实现要素:
7.本公开是并且包括至少一种用于将底部填充物分配到印刷电路板上的组件的设备、系统和方法。该设备、系统和方法包括适于将底部填充物分配到底部填充物腔室内的印刷电路板上的组件的分配端执行器。分配端执行器可包括:机电连接件,其连接到至少一个分配机器人臂,所述分配机器人臂能够将所述分配物理地定位成靠近所述电路板;到分配控制器的通信连接件,所述分配控制器能够通信地控制至少所述分配;分配器,其包括底部填充物输出端口,所述底部填充物输出端口能够进行分配,并且所述底部填充物输出端口可移除地安装到所述机电连接件;以及至少基本上围绕分配器的保护外壳。
附图说明
8.本公开通过示例而非限制的方式在附图中示出,其中,相同的附图标记可以指示
类似的元件,并且其中:
9.图1示出了电路板组件;
10.图2示出了底部填充物组件的毛细管作用;
11.图3示出了底部填充物机;
12.图4示出了底部填充物机;
13.图5示出了底部填充物机;
14.图6示出了底部填充物分配器;
15.图7示出了底部填充物分配器;
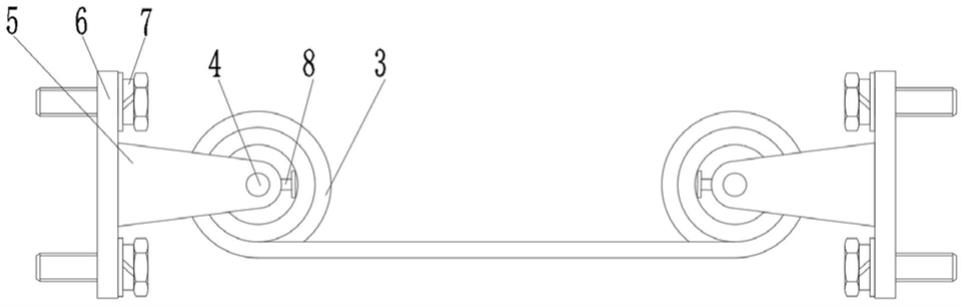
16.图8示出了底部填充物分配器;
17.图9示出了底部填充物校准系统;以及
18.图10示出了底部填充物处理系统。
具体实施方式
19.本文提供的附图和描述可能已经被简化以说明与清楚理解本文描述的设备、系统和方法相关的方面,同时为了清楚起见,消除了可以在典型的类似设备、系统和方法中发现的其它方面。本领域的普通技术人员可以认识到,其它元件和/或操作对于实现本文所述的设备、系统和方法可能是期望的和/或必要的。但是因为这样的元件和操作在本领域中是公知的,并且因为它们不促进对本公开的更好理解,所以在此可能不提供对这样的元件和操作的讨论。然而,本公开被认为固有地包括本领域普通技术人员将已知的对所描述的方面的所有这样的元件、变化和修改。
20.本文所使用的术语仅用于描述特定实例实施方式的目的,且不希望为限制性的。例如,如本文所用,单数形式“一”、“一个”和“该”也可旨在包括复数形式,除非上下文另外清楚地指明。术语“包括”、“包含”、“含有”和“具有”是包含性的,因此指定了所述特征、整数、步骤、操作、元件和/或组件的存在,但不排除一个或多个其它特征、整数、步骤、操作、元件、组件和/或其群组的存在或添加。除非明确地确定为执行顺序,否则这里描述的方法步骤、过程和操作不应被解释为必须要求它们以所讨论或示出的特定顺序执行。还应当理解,可以采用附加的或替代的步骤。
21.当元件或层被称为在另一元件或层“上”、“接合到”、“连接到”或“联接到”另一元件或层时,其可以直接在另一元件或层上、直接接合到、直接连接到或直接联接到另一元件或层,或者可以存在中间元件或层。相反,当元件被称为“直接在另一元件或层上”、“直接接合到”、“直接连接到”或“直接联接到”另一元件或层时,可以不存在中间元件或层。用于描述元件之间的关系的其他词语应当以类似的方式解释(例如,“之间”对“直接之间”、“相邻”对“直接相邻”等)。如本文所使用的,术语“和/或”包括一个或多个相关联的所列项目的任何和所有组合。
22.尽管术语第一、第二、第三等可以在这里用于描述各种元件、组件、区域、层和/或部分,但是这些元件、组件、区域、层和/或部分不应当受这些术语限制。这些术语仅用于将一个元件、组件、区域、层或部分与另一个元件、组件、区域、层或部分区分开。也就是说,除非上下文清楚地指出,否则诸如“第一”、“第二”和其它数字术语的术语在本文使用时不暗示顺序或次序。因此,在不脱离示例性实施方式的教导的情况下,下面讨论的第一元件、组
件、区域、层或部分可以被称为第二元件、组件、区域、层或部分。
23.本文公开了处理器实现的模块、系统和使用方法,其可以提供对多种类型的数字内容的访问和转换,所述多种类型的数字内容包括但不限于视频、图像、文本、音频、元数据、算法、交互式和文档内容,并且其跟踪、递送、操纵、转换和报告所访问的内容。这些模块、系统和方法的所述实施方式旨在是示例性的而非限制性的。因此,可以设想,本文所述的系统和方法可以被修改并且可以被扩展以提供对所述的示例性模块、系统和方法的增强和/或添加。因此,本公开旨在包括所有这样的扩展。
24.图1示出了放置在印刷电路板104上的组件102的顶视图。该组件具有底部填充物110,其在组件下方并且从顶视图看至少部分地延伸到组件的最外周边106的外部。底部填充物110通常部分地放置,因为由回流焊料形成的将组件102保持到板104的焊料接点112不提供足够的机械强度来将组件102牢固地且可操作地保持在板104上的适当位置。在组件102下方并且与焊料接合点112相邻的底部填充物110提供了这种机械稳定性。
25.图2示出了底部填充物110的毛细管作用202,使得底部填充物110流动以支撑板组件102。在图示中,在组件102的周边106附近并且邻近回流焊料接头112,通过毛细管作用202填充底部填充物110。在所示的示例中,热量204的施加通过毛细管作用202引起底部填充物110的这种蠕流。此蠕流填充在组件102下方且填充到组件102下方及周围、组件102与其驻留的板104之间以及组件102通过其经由焊料接头112与板的迹线连通的连接器周围的间隙中。值得注意的是,通常可能需要底层填料110的若干应用,以便充分填充组件下间隙,使得在组件102在目标板104上的位置处向其提供必要的机械稳定性。
26.如上所述,对于较大尺寸的板,底部填充物110的各种上述方面,即,在施加热量204时提供底部填充物材料,这使得底部填充物110的毛细管作用202成为可能,是特别困难的。这部分地是因为现有技术的底部填充物机需要比放置在其中的板大得多,以便允许底部填充物机的参考的机电组件执行本文描述的各种底部填充物和加热功能。因此,板越大,上述提供热和底部填充物的问题就越严重。
27.因此,实施方式提供了一种用于底部填充物机器的设备、系统和方法,该底部填充物机器容纳直径达48英寸或更大的圆形板,以向其上的组件提供底部填充物。因此,在实施方式中容纳的板也可以小于48英寸,例如34英寸、38英寸或42英寸,并且通过非限制性示例,所公开的教导也可以应用于大于48英寸的板,例如52英寸、54英寸或56英寸。
28.图3示出了底部填充物机302。在图示中,用于提供至少底部填充物的机电/机器人元件304可存在于底部填充物室306内,诸如机器302的前面部分的右侧和左侧的两个这样的机器人。这些机器人304可以由至少一个处理系统1312执行的软件1490控制,并且该软件1490可以包括允许训练机器人304在各种情境中并且向各种组件提供底部填充物的算法;其允许提供这种底部填充物;并且用于碰撞避免,例如在板310足够大以致需要使用多个机器人304来同时在板310的多个区域中提供底部填充物的实施方式中,使得机器人304在传送它们各自的算法路径时不会碰撞。
29.例如在机器302的前面,还可以包括合适尺寸的容纳输入314,以允许将印刷电路板310(例如,在全文中讨论的更大的板)插入机器302中。值得注意的是,调节输入314可以允许在插入输入314之前和/或之时将目标板310放置到载体316上,使得印刷电路板310可以在底部填充物工艺之前和/或整个过程中驻留或不驻留在载体316上,如本文进一步讨论
的。另外,容纳输入314可以经由任何已知的方法来接收板310和/或板310驻留在其上的载体316,例如手动地或自动地,例如被转位或未转位,和/或通过使用输入滑动件、往返装置或输入传送带,作为非限制性示例。
30.现在还参照图3和图4,底填机302的室306可包括靠近机器人304且作为非限制性示例的一个或多个热源以加热板,例如高位热源320和低位热源322。作为非限制性示例,下热源322可包括从板310的下侧加热板310的一个或多个方面或整个板310,例如通过加热板310所关联的载体316或从板提供热量。该较低热量可经由任何已知的方法提供给板310和/或提供给或来自载体316,例如作为非限制性示例的强制空气加热、ir加热或rf/感应加热。在一些实施方式中,可能希望所提供的较低热量在板310的被提供热量的部分上至少基本上均匀。
31.顶部加热器320可以是烤箱的类型,例如其中所提供的顶置通过诸如空气或其他气体的介质平移到邻近顶部加热器320的板310的任何方面的最顶部。这样,所提供的顶部热量可以是任何已知类型的,例如强制空气热量、rf/感应产生的热量等。值得注意的是,在实施方式中,顶部加热器320可以仅具有足够的尺寸以在其下方容纳大约一半的电路板310,使得电路板310,无论是否与载体316相关联,都可以被旋转以将先前未加热的方面放置在顶部加热器320下方,例如一次放置电路板310的一部分。如本文所论述,将经受顶部加热器320的此旋转可手动或自动执行,且在本文中始终被称为底部填充物热转位。
32.上述转位和加热可以由上述处理系统1312控制。如从图3、4和5中明显看出的,操作员显示和控制1445、1460可安全地位于底部填充物机302的外部,例如在其前部,并与处理系统1312通信。此外,如图所示,可以在机器302的后部提供输入/输出“机柜”330以供用户安全地访问,诸如访问处理系统1312和/或机器302的机电方面。该显示和控制1445、1460可以另外允许监督整个讨论的校准方面,或者可以与执行整个讨论的校准的一个或多个次站通信。
33.特别参照图5,在所示出的底填机302的前面示出了所引用的右机器人304a和左机器人304b。还示出了电路板310,其放置在机器302前面的载体316上,准备插入容纳输入314。值得注意的是,所示的载体316在与某些电子元件连通时,可使载体316用作本文所讨论的下加热器322。
34.图5中还示出了左分配控制器502a和右分配控制器502b,其允许例如经由一个或多个通信连接件,通过例如通过一个或多个机电连接件与右机器人304a和左机器人304b中的每一个相关联的分配头504a、504b执行欠填充的分配。在将底部填充物分配到电路板310上的组件时,由于至少加热了贯穿全文讨论的下加热器322,并且在一些实施方式中,由于板310的转位以使组件中的一些经受顶部加热器320,电路板组件可经受底部填充物的毛细管作用。此外,在某些实施方式中,板310的某些方面上的组件可经受顶部加热器320以用于预加热,且接着从顶部加热器320转位出以经受分配头504a、504b。又进一步地,在一些实施方式中,作为非限制性示例,可以提供底部填充物,并且由下加热器322引起的毛细管作用,并且此后板310的方面可以被转位到与顶部加热器320相关联以用于固化的目的。
35.更具体地,关于图5,可以为每个机器人提供几个电机控制,例如与分配控制器502a、502b结合。这样的马达控制器和分配控制器可以根据由处理系统1312执行的预定程序/配方1490来致动,和/或这样的致动可以由与处理系统1312交互的操作者修改,诸如由
与本文讨论的操作者显示器和控制器1445、1460交互的操作者修改。
36.值得注意的是,所示的机器人304a、304b可以包括一个或多个与其连接的端执行器,该端执行器是和/或包括分配头504a、504b,以对印刷电路板310的暴露部分,即不在顶部加热器320下方的那些部分执行贯穿全文讨论的功能。也就是说,如上所述,通过非限制性示例的方式,与机器人相关联的端执行器可以是或包括能够根据配方1490分配底部填充物的任何类型的分配头504a、504b。此外,机器人304和(一个或多个)分配头504两者可以在执行配方1490的所公开的处理系统1312的控制下。
37.此外,如本领域技术人员根据本文的讨论将理解的,本文中讨论的作为操作分配头504a、504b的左和右机器人304a、304b易于接近以在电路板310的上面部分上进行操作,该上面部分被转位到机器人304a、304b的腔室内的操作区域的物理附近。由此,如贯穿全文所讨论的,板310的在任何顶部加热器320外部的转位部分允许由(多个)机器人304a、304b经由分配头504a、504b施加底部填充物。并且在施加底部填充物之后,通过非限制性示例,在诸如顶部加热器320的第二加热器下转位/旋转该径向部分可以增强毛细管作用,和/或可以提供板组件和/或底部填充物的固化。
38.例如对于所公开的底部填充物工艺,将板分阶段地转位到第一或第二加热器中,例如顶部加热器320形式的第二加热器,提高了工艺稳定性。例如,所公开的机器人304可以在给定时间仅在电路板的一个方面上操作分配头504,例如如上所述在给定时间仅在圆形电路板的四分之一上工作,而电路板的其余部分可以通过次级加热器320和/或任何初级加热器322的组合而被固化、预热或经受温度维持。
39.更具体地,如图6所示,可以通过与分配控制器502远侧的机械臂304的端相关联的每个端执行器/分配头504来执行底部填充物702的分配。如图所示,底部填充物端操纵装置/分配头504可以是独立的704,例如可以包括加热和冷却组件706,其有助于防止待分配的底部填充物702在其可以从分配头504适当地分配到电路板上之前固化或硬化。也就是说,通过非限制性示例,由至少一个加热器,诸如本文所讨论的下部加热器322和顶部加热器320提供的热量,在此热量逸出到分配器头504驻留的底部填充物机器的室中的程度上,可以在底部填充物702从所示的端执行器504分配之前,全部或部分地引起底部填充物702的固化/交联。
40.图7a和7b示出了根据一些实施方式的示例性分配端执行器504。如图所示,实施方式可包括热屏障802,其可部分地防止由于腔室内的升高的温度而导致的尚未分配在分配头504中的底部填充物702发生不期望的固化,即交联。图7中进一步示出了空气吹扫装置804,其可以是或形成用于封闭分配头504的冷却和减压系统的一部分。作为非限制性示例,冷却系统可包括例如部分地使用空气吹扫装置804的空气、氮气等的被动或强制再循环装置。分配器头504的热屏障802和冷却装置804可以防止对未分配的底部填充物的过程中的变化的需要,例如分配速率或未分配的底部填充物的使用寿命的变化,这种变化可能是由于未分配的底部填充物的固化在从分配头504分配时不期望地加速而引起的。
41.图7中进一步示出的可以是端执行器外壳704内的一个或多个摄像机810。如本文进一步讨论的,这些摄像机810可以允许校准、底部填充物分配过程和分配头504操作监控等。
42.图7另外示出了激光距离传感器820,例如可以用于校准分配头504空间定向和/或
周期性地、半连续地或连续地监控从分配头504到其上发生分配的目标印刷电路板的距离。监控从分配头504到电路板的距离允许增强的过程控制,至少在防止不期望的加速固化的程度上,可以比现有技术更仔细地控制底部填充物分配速率和位置。
43.图7还示出了照明装置830,例如可以用于附加的过程监控。还示出了一个或多个附加的热障834,以防止由外壳704的热污染引起不期望的加速固化,并且应当注意,附加的热障834可以是不透明的或透明的,诸如其中一个或多个附加的热障834被放置在激光距离传感器820、照明装置830等的路径内。
44.此外,显然分配端执行器504可以包括一种或多种不同类型的分配器840。分配器840是最终分配点,本文所讨论的底部填充物702从该分配点从端执行器504向外分配到电路板上。值得注意的是,如图所示,分配器840和/或端执行器504可以是模块化的,并且因此可以包括一个或多个弹簧或夹子致动的释放件850,由此释放件850的致动可以允许分配器840的移除和替换。
45.作为非限制性示例,图8a、8b和8c示出了可在实施方式中使用的特定的不同分配器840。图8a示出了正压针式分配器840a,其中作为非限制性示例,针902可被螺纹连接到分配头504上以用作分配器840a。针902的尺寸可以被确定为提供特定实施方式所特有的流速和液滴尺寸。类似地,图8b示出了阿基米德分配器840b,其中,螺旋推运器904的致动可以类似地控制底部填充物材料的流速和液滴尺寸。
46.图8c示出了压电喷射分配器840c。如图所示,压电喷射分配器840c包括材料供给910和具有倾斜尖端912a的压电锤912,使得当压电锤912上升和下降时,来自材料供给910的底部填充物材料702被从分配器输出端口914向外推动到电路板上。因此,锤912的上升和下降速率可以指示由分配器840c分配的每秒点,并且压电锤912的成角度的尖端912a的角度,例如结合输出端口914的尺寸,可以指示压电锤912的每次下降分配的底部填充物材料的体积。根据前述内容,实施方式可包括从所公开的压电喷射分配器840c每秒分配多达300滴底部填充物。
47.图8c中还示出了一个或多个加热器920,例如完全或部分地围绕所公开的输出端口914。这些加热器920可以用于将分配的底部填充物材料702保持在适当的分配温度,在该温度下,底部填充物材料容易以期望的流动和液滴速率流动,但是不会达到在分配之前底部填充物材料702开始固化的温度。也就是说,在输出端口914处的一个或多个加热器920可以允许以现有技术中未知的精度对分配的底部填充物材料702进行精确的温度控制。
48.根据前述内容,在实施方式中可实现底部填充物分配的每秒细化的尺寸和点数。如将理解的,这转化为由每个分配头504提供的在x
‑
y轴上的每秒覆盖的特定毫米数。因此,流速可以根据需要而变化,例如用于特定电路板上的组件的数量或尺寸,或者分配头504可以模块化地使用,例如如上所述,其中特定分配头504用于每秒特定流速的尺寸和点数量。此外,每个这样的模块化分配头504在堵塞发生之前可以具有其自己独特的最大速率和最大温度,并且因此这些参数可以在逐个情况的基础上与用于特定电路板的处理的需要相匹配。
49.图9示出了根据一些实施方式的用于分配头/端执行器504和分配器840的示例性校准系统950。如图所示,分配头504可以位于底部填充物分配机器人臂304的远端,远离可以操作以控制分配头504的分配控制器502,如全文所讨论的。此外,根据实施方式的校准系
统950可以包括一个或多个分配净化954,在该处可以从分配头504压出空气以避免堵塞和/或不期望的固化,并且进一步地,在该处可以从分配头504清除未使用的或堵塞的材料。
50.校准系统950中还可以包括一个或多个z轴高度校准传感器958。这样的传感器958可以提供从预期电路板感测分配头504和/或分配输出端口914的高度,和/或可以提供目标位置,在该目标位置处,在一些实施方式中,本文讨论的在分配头504内的激光高度传感器820可以评估在电路板上方感测的高度的适当性。
51.示例性校准系统950中还可以包括一个或多个加权传感器970。在称重传感器970处,可以感测来自分配器输出端口914的每个分配点和/或点组。由此,分配头540的每秒点和每秒覆盖毫米可从称重传感器的感测推断。不用说,这种感测提供了对用于底部填充物的可重复的流速和体积的确认,该流速和体积与由配方1490规定的用于每个电路板的期望的半导体工艺相匹配。
52.结合地,前述校准方面可以允许分配头504的设置的变化,诸如可以由用户输入和/或修改到贯穿全文讨论的用户界面和显示器1445、1460中。这样,可以使用所公开的校准系统950来校准和重新校准配方1490的分发过程。当然,适当校准的感测也可以在底部填充物的“实时”执行期间执行,诸如通过包括在分配头504内的一个或多个传感器,如本文通篇所讨论的。
53.在整个讨论的板上运行的操作可以包括由处理系统1312执行的软件“配方”1490所包含的一系列处理步骤。配方可以自动或手动选择,并且一旦板与载体相关联,和/或在板通过适应输入之后,配方可以执行。配方可以包括一组定义的命令,例如机器人运动、分配类型、分配头温度、分配头距离、到加热器的功率和/或对准。例如,如本领域技术人员将理解的,命令可以被分组为子例程。
54.作为示例,配方1490可以包括将板加载到适应输入中;一旦所述板在所述室内,或在所述板进入所述室之前,使所述下加热器达到一定温度;将机器人移动到配方中限定的每个位置,以基于分配头504的受控操作分配底部填充物;以及对于与其相关联的转位的板的任何方面,将室加热器320、322致动到预定温度。在一些实施方式中,不同的子配方可以由多个机器人304和/或分配头504中的每一个串联或并联运行,所有都作为处理系统的方面运行。也就是说,一系列配方可被连结在一起成为单个配方,和/或配方可被并行或排序以用于适当的操作,诸如通过处理系统和/或“教导”模式。
55.一系列的移动、分配开始和停止、速度和停留教导可包括根据配方1490执行的不连续的、半连续的或连续的“路径”。在实施方式中,作为配方1490的一部分,多个机器人的路径可能必须被解除冲突,诸如以在具有在三维空间中同时占据相同位置的能力的多个机器人之间执行碰撞避免,和/或以便避免由多个头部504对底部填充物的“双重分配”。
56.图10通过非限制性示例的方式描绘了用于与实施方式相关联地使用的示例性计算机处理系统1312。处理系统1312能够执行软件,诸如操作系统(os)、训练应用、用户界面和/或一个或多个其他计算算法/应用1490,诸如本文所讨论的方法。示例性处理系统1312的操作主要由这些计算机可读指令/代码1490控制,例如存储在计算机可读存储介质中的指令,所述计算机可读存储介质例如硬盘驱动器(hdd)1415、诸如cd或dvd的光盘(未示出)、诸如usb“拇指驱动器”的固态驱动器(未示出)等。这些指令可以在中央处理单元(cpu)1410内执行,以使系统1312执行所公开的操作、比较和计算。在许多已知的计算机服务器、工作
站、个人计算机等中,cpu 1410被实现在称为处理器的集成电路中。
57.应当理解,尽管示例性处理系统1312被示为包括单个cpu 1410,但是这样的描述仅仅是说明性的,因为处理系统1312可以包括多个cpu 1410。另外,系统1312可通过通信网络1470或一些其它数据通信装置1480来利用远程cpu(未示出)的资源,如通篇所讨论的。
58.在操作中,cpu 1410从计算机可读存储介质,例如hdd 1415,获取、解码和执行指令。这样的指令可以被包括在软件1490中。诸如计算机指令和其它计算机可读数据的信息经由系统的主数据传输路径在系统1312的组件之间传输。主数据传输路径可以使用系统总线架构1405,尽管可以使用其他计算机架构(未示出)。
59.举例来说,耦合到系统总线1405的存储器设备可包含随机存取存储器(ram)1425和/或只读存储器(rom)1430。这种存储器包括允许存储和检索信息的电路。rom 1430通常包含不能被修改的存储数据。存储在ram 1425中的数据可以由cpu 1410或其他硬件设备读取或改变。对ram 1425和/或rom 1430的访问可以由存储器控制器1420控制。
60.另外,处理系统1312可以包含外围通信控制器和总线1435,其负责将指令从cpu 1410传送到外围设备和/或从外围设备接收数据,外围设备诸如外围设备1440、1445和1450,其可以包括打印机、键盘和/或本文通篇讨论的操作者交互元件。外围总线的一个例子是相关领域中公知的外围组件互连(pci)总线。
61.由显示控制器1455控制的操作员显示1460可以用于显示由处理系统1312产生的或应其请求而产生的视觉输出和/或呈现数据,例如响应于上述计算程序/应用1490的操作。这样的视觉输出可以包括例如文本、图形、动画图形和/或视频。显示器1460可实施为具有基于crt的视频显示器、基于lcd或led的显示器、基于气体等离子体的平板显示器、触摸面板显示器或其类似者。显示控制器1455包括产生发送到显示器1460的视频信号所需的电子组件。
62.此外,处理系统1312可以包含可以用于耦合到外部通信网络1470的网络适配器1465,该外部通信网络可以包括或提供对因特网、内联网、外联网等的访问。通信网络1470可以利用电子地传送和传递软件和信息的手段来为处理系统1312提供访问。另外,通信网络1470可以提供分布式处理,其涉及若干计算机以及在执行任务时的工作量或协作工作的共享,如上所述。网络适配器1465可使用任何可用的有线或无线技术来与网络1470通信。作为非限制性示例,这样的技术可以包括蜂窝、wi
‑
fi、蓝牙、红外等。
63.在上述详细描述中,可以看出,为了本公开的清楚和简洁,各种特征被一起分组在单个实施方式中。本公开的这种方法不应被解释为反映实施方式需要比本文明确叙述的更多的特征的意图。相反,本公开将涵盖本领域技术人员根据本公开将理解的对所公开的实施方式的所有变化和修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。