技术特征:
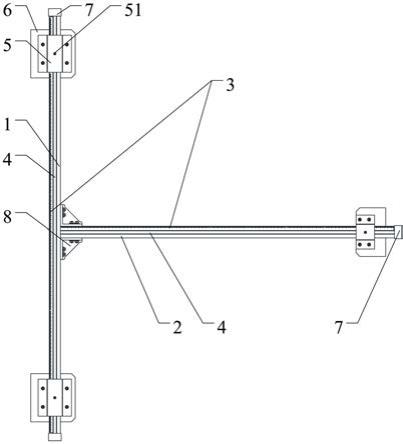
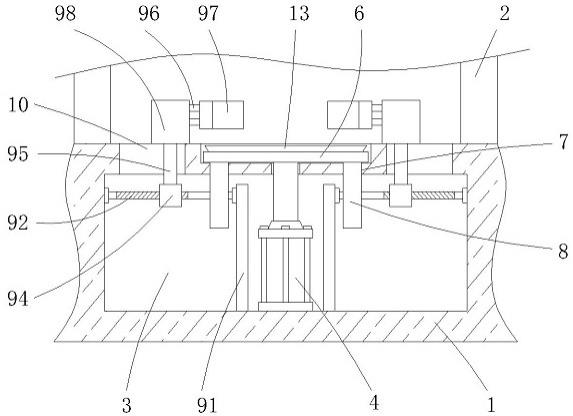
1.一种高速多路在线激光打标系统,其特征在于:包括多路分束棱镜组、聚焦透镜组、y方向长反射镜、x方向反射镜组、线缆;多路分束棱镜组z轴向下设置多个聚焦透镜构成聚焦透镜组,所述聚焦透镜组的每个聚焦透镜与多路分束棱镜组的每个分束棱镜一一对应;聚焦透镜组的z轴向下设置一y方向长反射镜;y方向长反射镜上安装多个与聚焦透镜对应的x方向反射镜,激光束经过y方向长反射镜反射后分别进入x方向反射镜组使得激光束经过y方向长反射镜反射后分别进入x方向反射镜组;经扩束后的平行激光束沿着x方向入射到多路分束棱镜组之中;经过多路分束棱镜组的逐级分束形成能量均分且沿着z轴向下传输的多路激光束;经分束后的平行激光束经过聚焦透镜组,形成多路的聚焦激光束;聚焦激光束入射到y方向长反射镜;激光束经过y方向长反射镜反射后分别进入x方向反射镜组;各激光束经x方向反射镜组反射后,最终到达线缆表面的打标区域。2.根据权利要求1所述的高速多路在线激光打标系统,其特征在于:多路分束棱镜组的分束棱镜由一个45度直角三棱镜和n
‑
1个横截面为平行四边形的四棱镜胶合而成,斜边与x方向夹角为度;其中n为最终平均分得的光束数量。3.根据权利要求1所述的高速多路在线激光打标系统,其特征在于:分光棱镜的第一个入射面镀增透膜。4.根据权利要求1所述的高速多路在线激光打标系统,其特征在于:聚焦透镜组每个透镜设置为沿z方向独立控制进行上下移动,使得平行激光束在到达线缆表面打标区域时,实现最终激光束聚焦点在z方向聚焦位置的控制;y方向长反射镜摆动以控制激光束在目标打标区域内实现y方向的运动;x方向反射镜组中每个反射镜独立进行摆动控制,以控制激光束在目标打标区域内实现x方向的运动。5.根据权利要求1所述的高速多路在线激光打标系统,其特征在于:多路分束棱镜组所分出的n路激光束具有相同的光强i
s
,即各激光束应满足公式(1):i
s
=i
i
;i0=ni
s
ꢀꢀꢀꢀꢀꢀꢀ
(1)其中i
i
表示第i个分束面分出的光束强度,其中i=1,2,
…
,n,则第i个分束面的反射率r
i
应满足公式(2)的条件:则第i个分束面的透射率t
i
应满足公式(3)的条件:由公式(2)和(3)可知,最后一个分束面i=n的透射率为0,反射率为1,即为全反射镜面;第i个分束面的透反射比p
i
为:6.一种根据权利要求5所述的高速多路在线激光打标系统的激光打标方法,其特征在于:每个打标区域中激光光斑的运动方式采取逐行扫描方式,其中各区域中每行的扫描时
间和位置由y方向长反射镜统一控制。7.根据权利要求6所述的激光打标方法,其特征在于:激光焦点首先从各自区域的一端沿x方向扫描到另一端,刻写完一行以后,激光焦点立即回程此过程激光束关闭;以上过程重复执行直到全部区域扫描完毕为止,完成工件表面标识的一次打标动作。8.根据权利要求7所述的激光打标方法,其特征在于:还包括静态下对图案进行速度补偿修正,原始的输入的静态设计图案在反方向预先做一个角度为θ的倾斜,补偿在线打标时产生的图案倾斜变形;倾角θ的大小由如下公式确定:其中,δy为x方向扫描行在y方向的间隔;δt为x方向行扫描的周期,包括x方向进行一行扫描所需要的时间以及激光焦点回程一次所花费的时间。
技术总结
本发明公开了一种高速多路在线激光打标系统和方法,包括多路分束棱镜组、聚焦透镜组、y方向长反射镜、x方向反射镜组、线缆;多路分束棱镜组z轴向下设置多个聚焦透镜构成聚焦透镜组,所述聚焦透镜组的每个聚焦透镜与多路分束棱镜组的每个分束棱镜一一对应。本发明采用多路激光束分别控制打标的方法,用多个可相对独立控制的打标区域相互拼接,以完成工件在高速运动状态大范围打标的动作。运动状态大范围打标的动作。运动状态大范围打标的动作。
技术研发人员:张渊 廉小斌
受保护的技术使用者:苏州实创德光电科技有限公司
技术研发日:2021.04.19
技术公布日:2021/10/19
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。