技术特征:
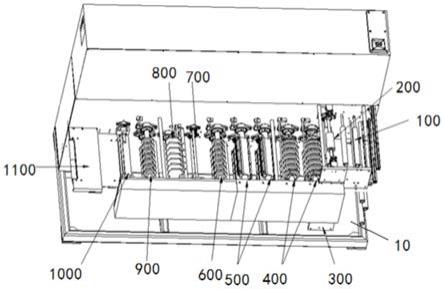
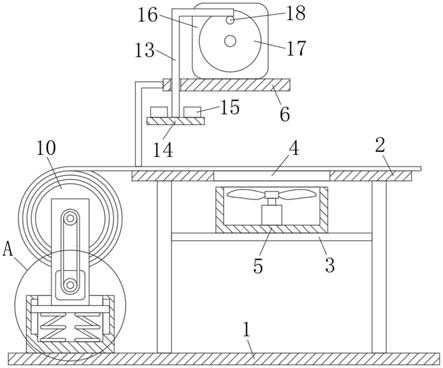
1.一种基于ros智能agv小车的生活垃圾回收系统,包括上位机,以及与上位机连接的智能回收垃圾箱、智能回收小车、智能回收客户端,其特征在于:所述智能回收垃圾箱包括垃圾箱处理器(3)、显示屏装置(10)、垃圾回收装置6、垃圾投递装置(2)、人体检测及照明装置、垃圾箱通信装置(4)、垃圾识别装置(7)和垃圾桶状态检测装置(5),其中,显示屏装置(10)、垃圾回收装置6和垃圾投递装置(2)分别与垃圾箱处理器(3)的输出端连接,人体检测及照明装置、垃圾箱通信装置(4)、垃圾识别装置(7)和垃圾桶状态检测装置(5)分别与垃圾箱处理器(3)的输入端、输出端连接;所述智能回收小车包括小车处理器(12)、定位机构(19)、视觉机构(13)、驱动机构(14)、搬运机构(15)、导航机构(18)、通信机构(17)、人机交互机构(16),其中,定位机构(19)和视觉机构(13)分别与小车处理器(12)的输入端连接,驱动机构(14)和搬运机构(15)分别与小车处理器(12)的输出端连接,导航机构(18)、通信机构(17)和人机交互机构(16)分别与小车处理器(12)的输入端、输出端连接;所述智能回收客户端包括客户端处理器、以及与客户端处理器的输入端、输出端分别连接的信息接收模块、通信模块、小车操控模块和积分数据库模块。2.根据权利要求1所述的一种基于ros智能agv小车的生活垃圾回收系统,其特征在于:所述人体检测及照明装置主要由人体感应测距模块(11)与照明模块(1)组成,人体感应测距模块(11)位于智能回收垃圾箱中偏下部,其包括hc
‑
sr505迷你小型人体感应模块和hc
‑
sr04超声波测距模块;照明模块(1)位于智能回收垃圾箱顶部。3.根据权利要求1所述的一种基于ros智能agv小车的生活垃圾回收系统,其特征在于:所述垃圾桶状态检测装置(5)主要由红外感应模块和报警电路构成,所述红外感应模块用于判定智能回收垃圾箱内垃圾含量超过安全容量值时,进入“消抖”模式,延迟一段时间后,再进行判定,若智能回收垃圾箱内垃圾含量超过安全容量值,发送信号至垃圾箱处理器(3),同时智能回收垃圾箱上的报警电路的蜂鸣器鸣叫、报警灯点亮,以作报警作用。4.根据权利要求1所述的一种基于ros智能agv小车的生活垃圾回收系统,其特征在于:所述垃圾回收装置(6)主要由步进电机、旋转盘、五类垃圾桶组成,其中五类垃圾桶包括可回收垃圾桶、不可回收垃圾桶、有害垃圾桶、其他垃圾桶和人为干预变量垃圾桶,当垃圾种类识别成功后,垃圾箱处理器(3)发送信号驱动步进电机带动旋转盘,使对应垃圾桶对准投递口,准备接收生活垃圾。5.根据权利要求1所述的一种基于ros智能agv小车的生活垃圾回收系统,其特征在于:所述垃圾投递装置(2)主要由投递电机与格挡板组成,当对应五类垃圾桶转动至投递口下方后,发送信号至垃圾箱处理器(3),垃圾箱处理器(3)发送信号至投递电机驱动投递电机拉走格挡板,使垃圾因重力掉入对应五类垃圾桶的其中一桶中。6.根据权利要求1
‑
5任意一项所述的一种基于ros智能agv小车的生活垃圾回收系统,其特征在于:所述垃圾识别装置(7)由语音模块与openmv模块进行双模式识别,通过语音唤醒,进入人机交互模式,通过语音交互进行垃圾类别分类,通过关键词汇进行垃圾种类判定,判定成功后进行语音播报,播放信息为垃圾种类与识别成功与否,通过openmv摄像头进行自主识别,御用microphthon解析器进行图像处理,由edgeimpulse训练模型进行垃圾种类自主识别,识别成功后进行语音播报,播放信息为垃圾种类与识别成功与否。7.基于权利要求1
‑
6任意一项所述的基于ros智能agv小车的生活垃圾回收系统的运行
方法,其特征在于,包括以下步骤:(1)智能回收垃圾箱识别垃圾并进行投递;(2)当智能回收垃圾箱容量被判定超过安全容量后,发出警告并发送满载信息到智能回收客户端;(3)智能回收客户端接收消息后,发送信号至智能回收小车;(4)智能回收小车接收信息,搬运空载垃圾桶前往指定地点,取走满载垃圾桶后将空载垃圾桶进行更换,发送处理完毕信号;(5)智能回收垃圾箱解除警报,继续工作;(6)智能回收小车完成更换后将满载垃圾桶进行运输到垃圾终点站处理。8.基于权利要求7所述的基于ros智能agv小车的生活垃圾回收系统的运行方法,其特征在于:步骤(4)中,首先,智能回收小车搬运空载垃圾桶前往指定地点,先通过由gps模块定义的定位机构(19)确定智能回收小车实时位置,通过由360
°
激光测距雷达自建地图规划最优路线,同时通过驱动机构(14)运作起来,根据最优路线行驶最优路径;其次,垃圾智能回收小车通过视觉机构(13)与导航机构(18)双模式判定前方是否出现障碍物,若出现障碍物则先通过驱动机构(14)减速慢行,如若判定障碍物逐渐靠近小车则小车通过驱动机构(14)停止原地,如若障碍物不移动则通过导航机构(18)进行路径二次规划,重新通过驱动机构(14)行驶最优路径;最后,智能回收小车通过搬运机构(15)、视觉机构(13)、通信机构(17)实时观测搬运状态,当智能回收小车到达智能回收垃圾箱后,置放空载垃圾桶,打开智能回收垃圾箱的保护盖,取走满载垃圾桶后将空载垃圾桶进行更换,而后搬运满载垃圾桶;待智能回收小车按设定路线将垃圾搬运回指定位置后,回归初始启动地点,搬运结束。9.基于权利要求7或8所述的基于ros智能agv小车的生活垃圾回收系统的运行方法,其特征在于:在步骤(3)中,智能回收客户端可实时监测垃圾箱满载信息,并可通过自定义来操控智能回收小车。10.基于权利要求7或8所述的基于ros智能agv小车的生活垃圾回收系统的运行方法,其特征在于:用户可通过智能回收客户端注册账号,并且当每投递一次垃圾均可进行积分累计,各垃圾积分不同,当积分达到一定数值时,可通过爱心小商铺兑换礼品。
技术总结
本发明公开一种基于ROS智能AGV小车的生活垃圾回收系统及其运行方法,包括上位机,以及与上位机连接的智能回收垃圾箱、智能回收小车、智能回收客户端,其运行方法为智能回收垃圾箱识别垃圾并进行投递;当智能回收垃圾箱容量被判定超过安全容量后,发出警告并发送满载信息到智能回收客户端;智能回收客户端接收消息后,发送信号至智能回收小车;智能回收小车接收信息,搬运空载垃圾桶前往指定地点,取走满载垃圾桶后将空载垃圾桶进行更换,发送处理完毕信号;智能回收垃圾箱解除警报,继续工作;智能回收小车完成更换后将满载垃圾桶进行运输到垃圾终点站处理。输到垃圾终点站处理。输到垃圾终点站处理。
技术研发人员:柏元忠 章信华 彭琦凯 游鲁飞 杨海富 张丽君 黄崇源 黄胜 韦永发 唐小淞 叶丹虹
受保护的技术使用者:桂林航天工业学院
技术研发日:2021.08.25
技术公布日:2021/10/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。