用于运载工具的操作单元
1.本申请要求两件德国国家专利申请10 2019 106 441.4(2019年03月13日)和10 2019 109 785.1(2019年04月12日)的优先权,其内容在此通过援引成为本专利申请的主题。
技术领域
2.本发明涉及一种用于运载工具的操作单元,其具有无振荡的触觉反馈。
背景技术:
3.触觉反馈系统通常由致动器和机械系统组成,致动器施加力,该力作用于机械系统上。用户可以感觉到由此产生的运动。
4.为了完全允许这种运动,机械系统通常是弹性安装的。机械的弹簧
‑
质量
‑
系统必定具有谐振频率,这些系统能够以所述谐振频率振荡。
5.有一些触觉反馈方法,其中,完全故意地激发这些谐振频率之一,以便可感知到由此产生的正弦振荡。这种方法的缺点是通常被描述为质量低劣或“海绵状”的印象。
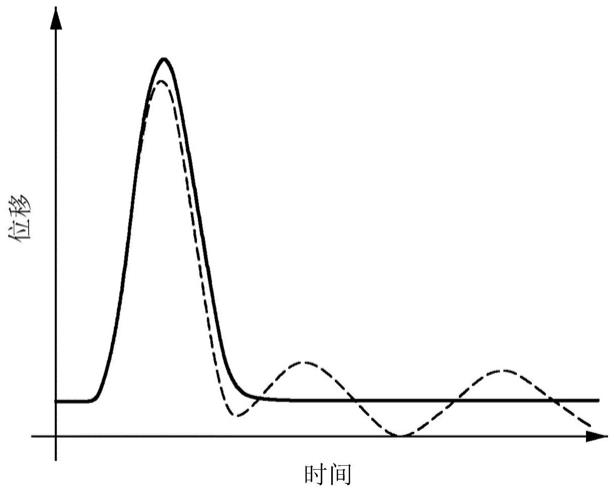
6.因此,机械系统的脉冲形路径路线是优选的(参见图1的曲线图中的实线)。
7.为了实现这种运动曲线,需要与系统的谐振频率相适应的力激励,原则上,其典型地类似于图2中的曲线图。两个最大值之间的距离必须与要抑制的振荡频率精确匹配。否则,该振荡在实际脉冲之后以后振荡的形式发生(参见图1的曲线图中的虚线)。这种后振荡显著降低了触觉反馈的质量,因此必须予以避免。
8.众所周知,希望通过在某个时间点以脉冲形式控制驱动器(致动器)来使振动触觉反馈系统停止(例如参见de
‑
a
‑
10 2013 007 962、de
‑
a
‑
10 2014 019 162、de
‑
b
‑
10 2007 058 110和ep
‑
a
‑
2 348 384)。
技术实现要素:
9.本发明的目的是,提出一种操作单元,其具有基本上无振荡的触觉反馈。
10.为了实现该目的,通过本发明提出一种用于运载工具的操作单元,该操作单元设置有:
11.‑
壳体;
12.‑
弹性地安置在壳体中和/或上的操作元件,
13.‑
其中,弹性地安置的操作元件形成了弹簧
‑
质量
‑
系统,该系统具有由构造引起的谐振频率;
14.‑
用于脉冲式地机械地激励操作元件的致动器;和
15.‑
在手动操纵该操作元件时用于控制致动器的控制单元,
16.‑
其中,由于构造原因,谐振频率高于通常还能由用于人的触觉感知和/或触觉反馈的感受器检测到的最大界限频率,并且
17.‑
其中,在谐振频率情况下和/或在谐振频率的谐波之一情况下,机械脉冲的频谱
没有频率分量,其方式为,功率密度谱在界限频率以上是无能量的或基本上是无能量的。
18.根据本发明,弹簧
‑
质量
‑
系统被设计成使得其谐振频率位于如下频带之外:在该频带以内,人对触觉感知、即对机械振动的“感觉”是敏感的。通常,仍然可由用于人的触觉感知和/或触觉反馈的皮肤感受器检测到的界限频率处于少量几个100hz,例如500hz或400hz等。根据本发明,机械脉冲的频谱在(第一)谐振频率(基频谐振频率)和/或谐振频率的谐波之一处没有频率分量。这例如表现为,功率密度谱在界限频率以上是无能量的或基本上是无能量的。由此在谐振频率情况下未激励弹簧
‑
质量
‑
系统。
19.如上所述,界限频率可以是300hz或250hz或200hz。
20.在本发明的另一有益设计中,通过选择弹簧
‑
质量
‑
系统的质量和/或弹簧常数,可以根据以下公式定义谐振频率:
[0021][0022]
其中,m是弹簧
‑
质量
‑
系统的质量,k是弹簧
‑
质量
‑
系统的弹簧常数,f是谐振频率。
[0023]
在操作单元的典型实现方式中,该操作单元是触控板或具有触敏表面的触摸屏。
[0024]
通常规定,操作单元被设计用于根据操纵压力或操纵力或者根据操纵压力或操纵力的变化过程来识别有效的操纵。
[0025]
在本发明的另一有益设计中,致动器可以设计为拉杆磁体、活动线圈驱动器或压电驱动器。
附图说明
[0026]
下面借助附图进一步介绍本发明。在附图中示出了不同的曲线图,这些曲线图已在上面介绍过了,并将在下面予以说明。
具体实施方式
[0027]
如前所述,质量
‑
弹簧
‑
系统具有谐振频率,只要该系统被相应地激励,它就以所述谐振频率振荡。用于手指中的触觉感知的感受器主要响应低于界限频率(例如200hz)的频率。如果可以将机械系统设计为使其谐振频率全都高于此阈值(例如200hz),则可以生成触觉明显的且根本无法振荡的脉冲。
[0028]
质量
‑
弹簧
‑
系统的第一谐振频率满足如下方程:
[0029][0030]
因此,通过选择质量m的大小和弹簧系数k,可以估计并主动地影响频谱中的第一谐振频率的位置。
[0031]
此外,激励信号的频谱受到这样的影响,即不激励谐振频率,但仍然产生手指可以感觉到的脉冲。作为激励信号的示例性选择的结果,参考图3中所示的曲线,其具有图4中所示的功率密度谱。在图4的曲线图的对数标度中可以清楚地看到,(归一化的)能量随着频率的增加而急剧下降,因此在阈值(例如200hz)之上不再有自振被显著地激发,由此满足任务。
[0032]
应当指出,根据本发明的系统行为与阻尼无关。因此,本发明所基于的原理更确切地说是,“没有受到激励的东西也不必被制动”。由此甚至不需要所谓的制动脉冲。相反,偏转直接跟随激发力。
[0033]
本发明的新颖性和优点在于,激励信号、特别是其频谱分量和机械设计的组合,该机械设计仅允许在激励频谱之外的振荡。
[0034]
文献目录
[0035]
1.de
‑
a
‑
10 2013 007 962
[0036]
2.de
‑
a
‑
10 2014 019 162
[0037]
3.de
‑
b
‑
10 2007 058 110
[0038]
4.ep
‑
a
‑
2 348 384
技术特征:
1.一种用于运载工具的操作单元,具有:
‑
壳体;
‑
弹性地安置在所述壳体中和/或上的操作元件,
‑
其中,弹性地安置的所述操作元件形成了弹簧
‑
质量
‑
系统,该弹簧
‑
质量
‑
系统具有由构造引起的谐振频率;
‑
用于脉冲式地机械地激励所述操作元件的致动器;和
‑
在手动操纵所述操作元件时用于控制所述致动器的控制单元,
‑
其中,所述谐振频率由于构造原因而高于通常仍能由用于人的触觉感知和/或触觉反馈的感受器检测到的最大的界限频率,并且
‑
其中,在所述谐振频率情况下和/或在所述谐振频率的谐波之一情况下,机械脉冲的频谱没有频率分量,其方式为,该功率密度谱在该界限频率以上是无能量的或基本上是无能量的。2.如权利要求1所述的操作单元,其特征在于,所述界限频率为300hz或250hz或200hz。3.如权利要求2所述的操作单元,其特征在于,为了定义所述弹簧
‑
质量
‑
系统的谐振频率,根据以下公式来选择所述弹簧
‑
质量
‑
系统的质量和/或弹簧常数:其中,m是所述弹簧
‑
质量
‑
系统的质量,k是所述弹簧
‑
质量
‑
系统的弹簧常数,f是所述谐振频率。4.如权利要求1至3中任一项所述的操作单元,其特征在于,所述操作单元具有触控板或带有触敏表面的触摸屏。5.如权利要求1至4中任一项所述的操作单元,其特征在于,所述操作单元被设计为用于根据操纵压力或操纵力或者根据操纵压力或操纵力的变化过程来识别有效的操纵。6.如权利要求1至5中任一项所述的操作单元,其特征在于,所述致动器设计为拉杆磁体、活动线圈驱动器或压电驱动器。
技术总结
一种用于运载工具的操作单元,设置有壳体和弹性地安置在壳体中和/或上的操作元件,其中,弹性地安置的操作元件形成了一个弹簧
技术研发人员:斯特凡
受保护的技术使用者:贝洱海拉温控系统有限公司
技术研发日:2020.02.13
技术公布日:2021/10/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。