1.本发明属于电力设备用线做线领域,尤其涉及一种智能转轮式接线端子分装装置。
背景技术:
2.线鼻子或线叉等电力设备用线的小型器件在现有生活中应非常广泛,但是随着工业的发展,需要用到的接线就会大大增加,线鼻子等电力设备用线使用的小型器件使用数量越来越多,而使用这些小型器件时,又不得不人工一个一个按照步骤进行使用,这样大大降低了工作人员的效率,降低了组织部门的收益率,并且导致很多复杂问题的出现。线鼻子等电力设备用线使用的小型器件一般都是无规律堆在一起的,所以为了解决上述问题,在这里提出了一种智能转轮式接线端子分装装置,用以解决线鼻子等电力设备用线使用的小型器件的无规律堆放的问题。
技术实现要素:
3.为了改善上述问题,本发明设计了一种智能转轮式接线端子分装装置。本发明的技术方案如下:
4.一种智能转轮式接线端子分装装置,该装置可分为三个部分,特制同步带部分1、圆形弹夹式储件部分2、反圆形弹夹式储件部分3、激光测距传感部分4、弹簧式线鼻子漏斗部分5;顾名思义,其中圆形弹夹式储件部分2和反圆形弹夹式储件部分3是除安装方向不同、安装位置不同之外,其余都相同的两个部分。
5.一种智能转轮式接线端子分装装置中的特制同步带部分1,安装板6通过螺纹连接安装有一对左
‑
轴承座7,左
‑
轴承座7用于与短轴8形成共轴线的两个转动副,短轴8上通过紧定螺钉安装有左
‑
同步带轮14,左
‑
同步带轮14上安装有特制同步带9,特制同步带9另一端安装于右
‑
同步带轮15上,与左
‑
同步带轮14安装方式相似,右
‑
同步带轮15通过紧定螺钉安装于长轴12上,长轴12安装于一对右
‑
轴承座13上,形成共轴线的两个转动副,长轴12一端有盲孔,用于与同步带
‑
步进电机11输出轴连接,同步带
‑
步进电机11通过螺纹连接安装于同步带
‑
电机固定板10上,同步带
‑
电机固定板10通过螺纹固定于安装板6上。
6.一种智能转轮式接线端子分装装置中的圆形弹夹式储件部分2,其特征在于,电机固定座连接块25通过螺纹固定于安装板6上,电机固定座连接块25上通过螺纹固定上弹夹
‑
步进电机座21和弹夹
‑
轴承座23,弹夹
‑
步进电机座21上通过螺纹连接固定弹夹
‑
步进电机24,弹夹
‑
步进电机24的输出轴与拱形轴18的连接部分相连,并拱形轴18穿过弹夹
‑
轴承座23形成转动副,用以支撑拱形轴18,拱形轴18拱形的底部开设有凹槽,凹槽用于配合线鼻子圆形弹夹19拱形孔上对称安装的两个球头柱塞22,用于卡住或取下线鼻子圆形弹夹19,线鼻子圆形弹夹19边缘上均匀分布的每个线鼻子存放孔中都有放置有起摩擦效果的阻力管20,其中阻力管20和线鼻子圆形弹夹19的孔都设置有倒角,方便线鼻子进入,线鼻子圆形弹夹19的安装好后的位置,应靠近特制同步带9的侧面;在同步带另一侧,安装板6上通过螺纹
连接安装有凸轮推杆滑动座16,凸轮推杆滑动座16用于与凸轮推杆17形成滑动副,凸轮推杆17下侧与凸轮39接触,形成凸轮机构,用以控制凸轮推杆17前后运动,另凸轮推杆17上设有弹簧安装柱,用来安装弹簧40,弹簧40用来辅助凸轮机构的前后运动,弹簧40另一端连接上电机固定座连接块25,凸轮39与凸轮
‑
步进电机37输出轴固定连接,凸轮
‑
步进电机37安装于凸轮
‑
电机固定座38,凸轮
‑
电机固定座38安装于安装板6上,其中凸轮推杆17推出柱的中心和线鼻子圆形弹夹19能到达的最低存放孔中心,两者中心轴线相对位置应共线或在合理误差范围内,特制同步带9的凹槽高度中心面,与凸轮推杆17推出柱和线鼻子圆形弹夹19能到达的最低存放孔中心,应在同一水平面内或合理范围内。
7.一种智能转轮式接线端子分装装置中的激光测距传感部分4,激光传感固定座30通过螺纹安装于安装板6上,激光传感固定座30上有对应的左激光测距传感器31和右激光测距传感器32的槽,用于固定左激光测距传感器31和右激光测距传感器32。
8.一种智能转轮式接线端子分装装置中的弹簧式线鼻子漏斗部分5,在安装板6上安装有骑于特制同步带9两侧的漏斗下轨架27,漏斗下轨架27上开口与漏斗33下开口间隙配合,形成一个移动副,漏斗33右侧通过螺纹连接安装有振动电机34,另在漏斗33边侧通过四个螺丝35分别连接四个弹簧上阶梯柱26,四个弹簧上阶梯柱26与四个压力弹簧36同心接触,分别置于四个弹簧下阶梯柱28的管桶内,四个弹簧下阶梯柱28通过螺纹连接安装于安装板6上,其中漏斗下轨架27与漏斗33的最短距离和最长距离应合适调整,防止在振动时压坏线鼻子。
9.一种智能转轮式接线端子分装装置,线鼻子倒入漏斗33中,开始工作前,卡上线鼻子圆形弹夹19和反线鼻子圆形弹夹29,振动电机34启动,漏斗33在压力弹簧36的作用下开始上下振动,同步带
‑
步进电机11也启动,特制同步带9在同步带
‑
步进电机11作用下开始运动,特制同步带9的沟槽将线鼻子带出;此时特制同步带9的沟槽中有三种情况,一种是没有线鼻子、一种是线鼻子金属头朝含有同步带
‑
步进电机11的一侧、一种是线鼻子金属头朝不含有同步带
‑
步进电机11的一侧。通过左激光测距传感器31和右激光测距传感器32时,左激光测距传感器31和右激光测距传感器32时测量到特制同步带9的距离,两距离比较,若两个距离比较接近或相等,则槽中没有线鼻子,则继续测量下一个槽,直到测得两个传感器测量距离不一样,若距离较大的点偏向同步带
‑
步进电机11的一侧,则线鼻子朝向同步带
‑
步进电机11一侧,即系统便可以得出线鼻子在特制同步带9得到沟槽中的朝向,由于圆形弹夹式储件部分2、反圆形弹夹式储件部分3、激光测距传感部分4之间距离是固定的,所以得知线鼻子运动多少距离可以到达圆形弹夹式储件部分2或反圆形弹夹式储件部分3中心,即可以计算出到达两者时,同步带
‑
步进电机11所需要的转的角度,当被测量过的线鼻子移动到圆形弹夹式储件部分2或反圆形弹夹式储件部分3中心时,同步带
‑
步进电机11停止转动,若线鼻子的针头在有同步带
‑
步进电机11一侧,则弹夹
‑
步进电机24转动,将下一个线鼻子圆形弹夹19的存放孔置于相对于线鼻子圆形弹夹19的最下方,此时,凸轮推杆17在凸轮
‑
步进电机37的作用下动作,将线鼻子推到线鼻子圆形弹夹19中的阻力管20内,同步带
‑
步进电机11恢复运转状态;当被测量过的线鼻子移动到反圆形弹夹式存储部分3时,将反方向的线鼻子推入到反线鼻子圆形弹夹29内,当线鼻子圆形弹夹19或反线鼻子圆形弹夹29被装满时,停止装置运转,取下满了的线鼻子圆形弹夹19或反线鼻子圆形弹夹29,并安装一个新的线鼻子圆形弹夹19或反线鼻子圆形弹夹29,重复启动前的准备,重新启动装置。
10.一种智能转轮式接线端子分装装置,本装置可以兼容排列几种类型的线鼻子或线叉;以线鼻子为例:特制同步带9的宽度,需遵循l<w
同
<2l
‑
s,其中l为线鼻子全长,s为线鼻子非金属部分长度;在槽深为d时,特制同步带9槽宽d<
△
h<1.5d,其中d为线鼻子横截面外接圆直径的最大值;在槽深不变时,槽宽应合理设计;另左激光测距传感器31和右激光测距传感器32测量点,在特制同步带9带宽方向上的距离需要同时满足和其中s
max
为兼容的线鼻子最大非金属部分的长度,l
min
为兼容的线鼻子最小线鼻子的长度,f
max
为兼容的最大线鼻子金属部分的长度,其中测量点关于特制同步带9带长方向上的中心面对称;漏斗下轨架27上开口与漏斗33下开口之间的距离h,在满足不脱离滑轨的条件下满足d<h,其中d为线鼻子横截面外接圆直径的最大值。
11.本装置的特制同步带9能够从漏斗33中取出线鼻子等小型器件,弹簧式线鼻子漏斗部分5中得到震动电机34可以加速规整线鼻子等小型器件落到特制同步带9中,通过电磁推杆将线鼻子推到线鼻子圆形弹夹的存放孔内。本发明的可以合理调整参数,制造出兼容性强的分装装置。
附图说明
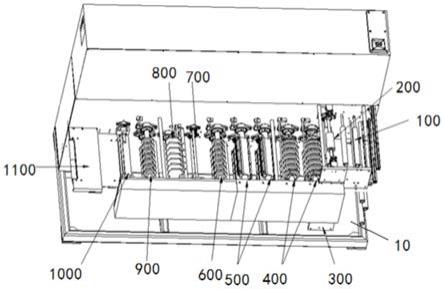
12.图1为本发明的整体结构示意图;
13.图2为本发明的特制同步带部分的结构示意图;
14.图3为本发明的圆形弹夹式储件部分的正面结构示意图;
15.图4为本发明的圆形弹夹式储件部分的反面结构示意图;
16.图5为本发明的激光测距传感部分的结构示意图;
17.图6为本发明的弹簧式线鼻子漏斗部分的结构示意图;
18.图7为本发明的弹簧式线鼻子漏斗部分某位置横截面的辅助结构示意图;
19.图8为本发明的特制同步带的结构示意图;
20.图9为本发明的半透明弹夹设计结构示意图;
21.图10为本发明的特制同步带带宽计算示意图;
22.图11为本发明的特制同步带外槽槽宽计算示意图;
23.图12为本发明的激光测距传感器测量点分布示意图。
具体实施方式
24.一种智能转轮式接线端子分装装置,线鼻子倒入漏斗33中,开始工作前,卡上线鼻子圆形弹夹19和反线鼻子圆形弹夹29,振动电机34启动,漏斗33在压力弹簧36的作用下开始上下振动,同步带
‑
步进电机11也启动,特制同步带9在同步带
‑
步进电机11作用下开始运动,特制同步带9的沟槽将线鼻子带出;此时特制同步带9的沟槽中有三种情况,一种是没有线鼻子、一种是线鼻子金属头朝含有同步带
‑
步进电机11的一侧、一种是线鼻子金属头朝不含有同步带
‑
步进电机11的一侧。通过左激光测距传感器31和右激光测距传感器32时,左激光测距传感器31和右激光测距传感器32时测量到特制同步带9的距离,两距离比较,若两个距离比较接近或相等,则槽中没有线鼻子,则继续测量下一个槽,直到测得两个传感器测量距离不一样,若距离较大的点偏向同步带
‑
步进电机11的一侧,则线鼻子朝向同步带
‑
步进电机11一侧,即系统便可以得出线鼻子在特制同步带9得到沟槽中的朝向,由于圆形弹夹式
储件部分2、反圆形弹夹式储件部分3、激光测距传感部分4之间距离是固定的,所以得知线鼻子运动多少距离可以到达圆形弹夹式储件部分2或反圆形弹夹式储件部分3中心,即可以计算出到达两者时,同步带
‑
步进电机11所需要的转的角度,当被测量过的线鼻子移动到圆形弹夹式储件部分2或反圆形弹夹式储件部分3中心时,同步带
‑
步进电机11停止转动,若线鼻子的针头在有同步带
‑
步进电机11一侧,则弹夹
‑
步进电机24转动,将下一个线鼻子圆形弹夹19的存放孔置于相对于线鼻子圆形弹夹19的最下方,此时,凸轮推杆17在凸轮
‑
步进电机37的作用下动作,将线鼻子推到线鼻子圆形弹夹19中的阻力管20内,同步带
‑
步进电机11恢复运转状态;当被测量过的线鼻子移动到反圆形弹夹式存储部分3时,将反方向的线鼻子推入到反线鼻子圆形弹夹29内,当线鼻子圆形弹夹19或反线鼻子圆形弹夹29被装满时,停止装置运转,取下满了的线鼻子圆形弹夹19或反线鼻子圆形弹夹29,并安装一个新的线鼻子圆形弹夹19或反线鼻子圆形弹夹29,重复启动前的准备,重新启动装置。
25.一种智能转轮式接线端子分装装置,本装置可以兼容排列几种类型的线鼻子或线叉;以线鼻子为例:特制同步带9的宽度,需遵循l<w
同
<2l
‑
s,其中l为线鼻子全长,s为线鼻子非金属部分长度;在槽深为d时,特制同步带9槽宽d<
△
h<1.5d,其中d为线鼻子横截面外接圆直径的最大值;在槽深不变时,槽宽应合理设计;另左激光测距传感器31和右激光测距传感器32测量点,在特制同步带9带宽方向上的距离需要同时满足和其中s
max
为兼容的线鼻子最大非金属部分的长度,l
min
为兼容的线鼻子最小线鼻子的长度,f
max
为兼容的最大线鼻子金属部分的长度,其中测量点关于特制同步带9带长方向上的中心面对称;漏斗下轨架27上开口与漏斗33下开口之间的距离h,在满足不脱离滑轨的条件下满足d<h,其中d为线鼻子横截面外接圆直径的最大值。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。