1.本发明涉及制导一体化引信技术领域,具体地,涉及基于前向探测波束宽度指标进行引信宽波束赋形方法及系统,更为具体地,涉及一种前向探测波束宽度快速计算方法。
背景技术:
2.早期出现的超高速目标机动量较小,导弹攻击时多采用逆轨拦截方式,弹目遭遇段交会角较小,对制导一体化引信前向探测波束宽度要求相对较低,用较窄的前向探测波束即可保证制导一体化引信对目标的持续探测和跟踪。随着弹道机动可变的高超声速目标的出现,极大地增加了逆轨拦截的难度,弹目遭遇段将出现较大的交会角和较大的导弹攻角。在较高相对速度、较大交会角、较大攻角条件下,为使引信波束始终探测跟踪目标,可采用窄波束跟踪和宽波束赋形等两种方式。相对速度较高(如相对速度大于5000m/s)时,窄波束跟踪方式对波束跟踪速率要求很高(如相对速度5000m/s时至少需150
°
/s的波束跟踪速率),根据目前的技术难以实现。采用宽波束赋行方式,就需要设置合理的引信前向探测波束宽度;探测波束宽度设计过小,无法保证给定交会条件下目标始终处于引信探测波束范围内,可能出现引信探测不到目标的现象;探测波束宽度设计过大,作用距离无法做大,可能存在引战系统反应不及、引战配合困难等问题,无法对目标造成有效毁伤的现象。
3.通过国内外文献查阅,目前针对前向探测波束宽度计算的研究甚少。为适应上述需求,本发明提出一种前向探测波束宽度快速计算方法,根据计算得到的前向探测波束宽度设定制导一体化引信前向探测波束宽度指标,指导引信设计,可保证给定交会条件下目标头部始终处于引信前向探测波束范围内,实现引信对目标的持续探测;结合引信目标检测识别算法,可提高制导一体化引信在给定交会条件下的探测启动概率,最终实现提高导弹杀伤概率的效果。
技术实现要素:
4.针对现有技术中的缺陷,本发明的目的是提供一种基于前向探测波束宽度指标进行引信宽波束赋形方法及系统。
5.根据本发明提供的一种基于前向探测波束宽度指标进行引信宽波束赋形方法,包括:
6.步骤s1:在预设交会条件下,通过遭遇段弹目相对位置以及角度几何分析,建立前向探测波束边界数学模型;
7.步骤s2:分析前向探测波束边界变化趋势,得到前向探测波束边界最大值对应的交会条件;
8.步骤s3:将前向探测波束边界最大值对应的交会条件输入前向探测波束边界数学模型,计算得到前向探测波束宽度取值;
9.步骤s4:根据计算得到的前向探测波束宽度取值,设定制导一体化引信前向探测波束宽度指标,完成引信宽波束赋形,确保在预设交会条件下目标头部始终处于引信前向
探测波束范围内。
10.优选地,所述步骤s1中前向探测波束边界数学模型包括:
11.θ0=max(2θ
10
,2θ
20
)
ꢀꢀ
(1)
12.其中,θ
10
=θ1' γ
m
δθ
ꢀꢀ
(2)
13.θ
20
=θ2' γ
m
δθ
ꢀꢀ
(3)
14.θ1'=η
‑
β0‑
α1ꢀꢀ
(4)
15.θ2'=η β0‑
α2ꢀꢀ
(5)
[0016][0017][0018][0019][0020][0021][0022][0023][0024]
其中,表示导弹速度矢量,模值为表示导弹速度矢量,模值为表示目标速度矢量,模值为表示目标速度矢量,模值为表示相对速度矢量,模值为χ表示弹目交会角;ρ表示脱靶量;t0表示数据处理时间;r表示前向探测距离;r0表示经时间t0后前向探测距离;l0表示目标最大尺寸;γ
m
表示导弹攻角;δθ表示角度指向误差;η表示导弹速度矢量与相对速度矢量夹角;β0表示目标几何中心所在方位与相对速度夹角;α1表示脱靶方位1目标头部所在方位与相对速度夹角和β0角度差;α2表示脱靶方位2目标头部所在方位与相对速度夹角和β0角度差;θ1'表示脱靶方位1目标头部和导弹的连线与弹轴夹角;θ2'表示脱靶方位2目标头部和导弹的连线与弹轴夹角;θ
10
表示脱靶方位1前向探测单侧波束边界;θ
20
表示脱靶方位2前向探测单侧波束边界;θ0表示前向探测波束边界。
[0025]
优选地,所述步骤s2包括:分析前向探测波束边界随包括导弹速度、目标速度、交
会角、探测距离、脱靶量、导弹攻角、角度指向误差、目标几何尺寸以及数据处理时间变化趋势,得到前向探测波束边界最大值对应的交会条件。
[0026]
优选地,所述步骤s3包括:将前向探测波束边界最大值对应的交会条件参数,包括导弹速度、目标速度、交会角、探测距离、脱靶量、导弹攻角、角度指向误差、目标几何尺寸以及数据处理时间输入前向探测波束边界数学模型,计算得到前向探测波束边界最大值,作为前向探测波束宽度取值,设定制导一体化引信前向探测波束宽度指标,开展制导一体化引信前向宽波束赋形设计。
[0027]
优选地,所述开展制导一体化引信前向宽波束赋形设计包括:根据制导一体化引信前向探测波束宽度指标,分析和优化相控阵天线阵列排布,并通过包括波控机和增益控制电路对相控阵每个天线阵元进行相位和幅度控制,经过预设的幅相加权,实现制导一体化引信前向宽波束赋形设计。
[0028]
根据本发明提供的一种基于前向探测波束宽度指标进行引信宽波束赋形系统,包括:
[0029]
模块m1:在预设交会条件下,通过遭遇段弹目相对位置以及角度几何分析,建立前向探测波束边界数学模型;
[0030]
模块m2:分析前向探测波束边界变化趋势,得到前向探测波束边界最大值对应的交会条件;
[0031]
模块m3:将前向探测波束边界最大值对应的交会条件输入前向探测波束边界数学模型,计算得到前向探测波束宽度取值;
[0032]
模块m4:根据计算得到的前向探测波束宽度取值,设定制导一体化引信前向探测波束宽度指标,完成引信宽波束赋形,确保在预设交会条件下目标头部始终处于引信前向探测波束范围内。
[0033]
优选地,所述模块m1中前向探测波束边界数学模型包括:
[0034]
θ0=max(2θ
10
,2θ
20
)
ꢀꢀ
(1)
[0035]
其中,θ
10
=θ1' γ
m
δθ
ꢀꢀ
(2)
[0036]
θ
20
=θ2' γ
m
δθ
ꢀꢀ
(3)
[0037]
θ1'=η
‑
β0‑
α1ꢀꢀ
(4)
[0038]
θ2'=η β0‑
α2ꢀꢀ
(5)
[0039][0040][0041]
[0042][0043][0044][0045][0046]
其中,表示导弹速度矢量,模值为表示导弹速度矢量,模值为表示目标速度矢量,模值为表示目标速度矢量,模值为表示相对速度矢量,模值为χ表示弹目交会角;ρ表示脱靶量;t0表示数据处理时间;r表示前向探测距离;r0表示经时间t0后前向探测距离;l0表示目标最大尺寸;γ
m
表示导弹攻角;δθ表示角度指向误差;η表示导弹速度矢量与相对速度矢量夹角;β0表示目标几何中心所在方位与相对速度夹角;α1表示脱靶方位1目标头部所在方位与相对速度夹角和β0角度差;α2表示脱靶方位2目标头部所在方位与相对速度夹角和β0角度差;θ1'表示脱靶方位1目标头部和导弹的连线与弹轴夹角;θ2'表示脱靶方位2目标头部和导弹的连线与弹轴夹角;θ
10
表示脱靶方位1前向探测单侧波束边界;θ
20
表示脱靶方位2前向探测单侧波束边界;θ0表示前向探测波束边界。
[0047]
优选地,所述模块m2包括:分析前向探测波束边界随包括导弹速度、目标速度、交会角、探测距离、脱靶量、导弹攻角、角度指向误差、目标几何尺寸以及数据处理时间变化趋势,得到前向探测波束边界最大值对应的交会条件。
[0048]
优选地,所述模块m3包括:将前向探测波束边界最大值对应的交会条件参数,包括导弹速度、目标速度、交会角、探测距离、脱靶量、导弹攻角、角度指向误差、目标几何尺寸以及数据处理时间输入前向探测波束边界数学模型,计算得到前向探测波束边界最大值,作为前向探测波束宽度取值,设定制导一体化引信前向探测波束宽度指标,开展制导一体化引信前向宽波束赋形设计。
[0049]
优选地,所述开展制导一体化引信前向宽波束赋形设计包括:根据制导一体化引信前向探测波束宽度指标,分析和优化相控阵天线阵列排布,并通过包括波控机和增益控制电路对相控阵每个天线阵元进行相位和幅度控制,经过预设的幅相加权,实现制导一体化引信前向宽波束赋形设计。
[0050]
与现有技术相比,本发明具有如下的有益效果:本发明首次提出前向探测波束宽度计算方法,可保证给定交会条件下目标始终处于制导一体化引信探测波束范围内,保证引信对目标的持续探测和跟踪,从而提高引信探测启动概率,最终提高导弹的杀伤概率;
附图说明
[0051]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0052]
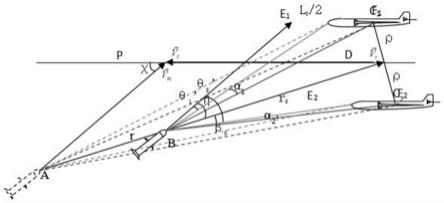
图1为前向探测单侧波束示意图。
[0053]
图1中:a
‑
导弹初始位置,b
‑
经时间t0后导弹位置,c1
‑
脱靶方位1对应目标几何中心位置,e1
‑
脱靶方位1对应目标头部位置,f1
‑
脱靶方位1对应目标尾部位置,c2
‑
脱靶方位2对应目标几何中心位置,e2
‑
脱靶方位2对应目标头部位置,f1
‑
脱靶方位2对应目标尾部位置,
△
apd
‑
组成的速度三角形。
具体实施方式
[0054]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0055]
实施例1
[0056]
本发明提出一种前向探测波束宽度快速计算方法,用以计算制导一体化引信前向探测宽波束赋形过程中的波束宽度,解决大交会角攻击态势引信对超高速目标的探测跟踪问题,进而提高导弹的杀伤概率。
[0057]
根据本发明提供的一种基于前向探测波束宽度指标进行引信宽波束赋形方法,如图1所示,包括:
[0058]
步骤s1:在预设交会条件下,通过遭遇段弹目相对位置以及角度几何分析,建立前向探测波束边界数学模型;
[0059]
步骤s2:分析前向探测波束边界变化趋势,得到前向探测波束边界最大值对应的交会条件;
[0060]
步骤s3:将前向探测波束边界最大值对应的交会条件输入前向探测波束边界数学模型,计算得到前向探测波束宽度取值;
[0061]
步骤s4:根据计算得到的前向探测波束宽度取值,设定制导一体化引信前向探测波束宽度指标,完成引信宽波束赋形,确保在预设交会条件下目标头部始终处于引信前向探测波束范围内。
[0062]
具体地,所述步骤s1中前向探测波束边界数学模型包括:
[0063]
θ0=max(2θ
10
,2θ
20
)
ꢀꢀ
(1)
[0064]
其中,θ
10
=θ1' γ
m
δθ
ꢀꢀ
(2)
[0065]
θ
20
=θ2' γ
m
δθ
ꢀꢀ
(3)
[0066]
θ1'=η
‑
β0‑
α1ꢀꢀ
(4)
[0067]
θ2'=η β0‑
α2ꢀꢀ
(5)
[0068]
[0069][0070][0071][0072][0073][0074][0075]
其中,表示导弹速度矢量,模值为表示导弹速度矢量,模值为表示目标速度矢量,模值为表示目标速度矢量,模值为表示相对速度矢量,模值为χ表示弹目交会角;ρ表示脱靶量;t0表示数据处理时间;r表示前向探测距离;r0表示经时间t0后前向探测距离;l0表示目标最大尺寸;γ
m
表示导弹攻角;δθ表示角度指向误差;η表示导弹速度矢量与相对速度矢量夹角;β0表示目标几何中心所在方位与相对速度夹角;α1表示脱靶方位1目标头部所在方位与相对速度夹角和β0角度差;α2表示脱靶方位2目标头部所在方位与相对速度夹角和β0角度差;θ1'表示脱靶方位1目标头部和导弹的连线与弹轴夹角;θ2'表示脱靶方位2目标头部和导弹的连线与弹轴夹角;θ
10
表示脱靶方位1前向探测单侧波束边界;θ
20
表示脱靶方位2前向探测单侧波束边界;θ0表示前向探测波束边界。
[0076]
具体地,所述步骤s2包括:分析前向探测波束边界随包括导弹速度、目标速度、交会角、探测距离、脱靶量、导弹攻角、角度指向误差、目标几何尺寸以及数据处理时间变化趋势,得到前向探测波束边界最大值对应的交会条件。
[0077]
具体地,所述步骤s3包括:将前向探测波束边界最大值对应的交会条件参数,包括导弹速度、目标速度、交会角、探测距离、脱靶量、导弹攻角、角度指向误差、目标几何尺寸以及数据处理时间输入前向探测波束边界数学模型,计算得到前向探测波束边界最大值,作为前向探测波束宽度取值,设定制导一体化引信前向探测波束宽度指标,开展制导一体化引信前向宽波束赋形设计。
[0078]
具体地,所述开展制导一体化引信前向宽波束赋形设计包括:根据制导一体化引信前向探测波束宽度指标,分析和优化相控阵天线阵列排布,并通过包括波控机和增益控制电路对相控阵每个天线阵元进行相位和幅度控制,经过预设的幅相加权,实现制导一体
化引信前向宽波束赋形设计。
[0079]
根据本发明提供的一种基于前向探测波束宽度指标进行引信宽波束赋形系统,包括:
[0080]
模块m1:在预设交会条件下,通过遭遇段弹目相对位置以及角度几何分析,建立前向探测波束边界数学模型;
[0081]
模块m2:分析前向探测波束边界变化趋势,得到前向探测波束边界最大值对应的交会条件;
[0082]
模块m3:将前向探测波束边界最大值对应的交会条件输入前向探测波束边界数学模型,计算得到前向探测波束宽度取值;
[0083]
模块m4:根据计算得到的前向探测波束宽度取值,设定制导一体化引信前向探测波束宽度指标,完成引信宽波束赋形,确保在预设交会条件下目标头部始终处于引信前向探测波束范围内。
[0084]
具体地,所述模块m1中前向探测波束边界数学模型包括:
[0085]
θ0=max(2θ
10
,2θ
20
)
ꢀꢀ
(1)
[0086]
其中,θ
10
=θ1' γ
m
δθ
ꢀꢀ
(2)
[0087]
θ
20
=θ2' γ
m
δθ
ꢀꢀ
(3)
[0088]
θ1'=η
‑
β0‑
α1ꢀꢀ
(4)
[0089]
θ2'=η β0‑
α2ꢀꢀ
(5)
[0090][0091][0092][0093][0094][0095][0096]
[0097]
其中,表示导弹速度矢量,模值为表示导弹速度矢量,模值为表示目标速度矢量,模值为表示目标速度矢量,模值为表示相对速度矢量,模值为χ表示弹目交会角;ρ表示脱靶量;t0表示数据处理时间;r表示前向探测距离;r0表示经时间t0后前向探测距离;l0表示目标最大尺寸;γ
m
表示导弹攻角;δθ表示角度指向误差;η表示导弹速度矢量与相对速度矢量夹角;β0表示目标几何中心所在方位与相对速度夹角;α1表示脱靶方位1目标头部所在方位与相对速度夹角和β0角度差;α2表示脱靶方位2目标头部所在方位与相对速度夹角和β0角度差;θ1'表示脱靶方位1目标头部和导弹的连线与弹轴夹角;θ2'表示脱靶方位2目标头部和导弹的连线与弹轴夹角;θ
10
表示脱靶方位1前向探测单侧波束边界;θ
20
表示脱靶方位2前向探测单侧波束边界;θ0表示前向探测波束边界。
[0098]
具体地,所述模块m2包括:分析前向探测波束边界随包括导弹速度、目标速度、交会角、探测距离、脱靶量、导弹攻角、角度指向误差、目标几何尺寸以及数据处理时间变化趋势,得到前向探测波束边界最大值对应的交会条件。
[0099]
具体地,所述模块m3包括:将前向探测波束边界最大值对应的交会条件参数,包括导弹速度、目标速度、交会角、探测距离、脱靶量、导弹攻角、角度指向误差、目标几何尺寸以及数据处理时间输入前向探测波束边界数学模型,计算得到前向探测波束边界最大值,作为前向探测波束宽度取值,设定制导一体化引信前向探测波束宽度指标,开展制导一体化引信前向宽波束赋形设计。
[0100]
具体地,所述开展制导一体化引信前向宽波束赋形设计包括:根据制导一体化引信前向探测波束宽度指标,分析和优化相控阵天线阵列排布,并通过包括波控机和增益控制电路对相控阵每个天线阵元进行相位和幅度控制,经过预设的幅相加权,实现制导一体化引信前向宽波束赋形设计。
[0101]
通过本发明计算得到的前向探测波束宽度取值,可用于设定制导一体化引信前向探测波束宽度指标,指导引信设计。当制导一体化引信前向探测波束宽度小于该指标时,可能出现目标始终处于引信探测区外,引信接收不到目标回波、无法启动的现象;制导一体化引信前向探测波束宽度大于该指标时,在引信功率不变的情况下,可能出现作用距离降低、在弹目距离较近时才探测到目标回波的现象,可能存在引战系统反应不及、引战配合困难、无法对目标造成有效毁伤的现象。综上,根据本发明计算得到的前向探测波束宽度设定制导一体化引信前向探测波束宽度指标,指导引信设计,可提高引信在给定交会条件下的探测启动概率,最终实现提高导弹杀伤概率的效果。
[0102]
实施例2
[0103]
实施例2是实施例1的优选例
[0104]
本发明提出的前向探测波束宽度快速计算方法,包括以下步骤:
[0105]
(1)在给定交会条件下,通过遭遇段弹目相对位置以及角度几何关系分析推得前向探测波束边界数学模型公式;
[0106]
(2)分析前向探测波束边界随导弹速度、目标速度、交会角、探测距离、脱靶量、导弹攻角、角度指向误差、目标几何尺寸、数据处理时间等变化趋势,找出其最大值;
[0107]
(3)将计算得到的前向探测波束边界最大值,作为前向探测波束宽度取值,开展制导一体化引信前向宽波束赋形设计。
[0108]
所述前向探测波束边界数学模型是将导弹速度矢量模值目标速度矢量模值交会角χ、探测距离r、脱靶量ρ、导弹攻角γ
m
、角度指向误差δθ、目标几何尺寸l0、数据处理时间t0作为输入量,通过遭遇段弹目相对位置、角度几何关系分析,得到前向探测波束边界θ0计算公式的过程。
[0109]
建立前向探测波束边界数学模型后,分析前向探测波束边界随输入量的变化趋势、找出最大值,将计算得到的最大值作为前向探测波束宽度取值;据此设计制导一体化引信前向探测波束宽度,并完成引信宽波束赋形,可确保在给定交会条件下目标头部始终处于引信前向探测波束范围内;结合引信目标检测识别算法,可提高制导一体化引信在给定交会条件下的探测启动概率,最终实现提高导弹杀伤概率的效果。
[0110]
本发明计算得到的前向探测波束边界最大值用于设定制导一体化引信前向探测波束宽度指标,可指导引信设计;据此设计制导一体化引信前向探测波束宽度,并完成引信宽波束赋形,可确保在给定交会条件下目标头部始终处于引信前向探测波束范围内;结合引信目标检测识别算法,可提高制导一体化引信在给定交会条件下的探测启动概率,最终实现提高导弹杀伤概率的效果。
[0111]
实施例3
[0112]
实施例3是实施例1和/或实施例2的优选例
[0113]
本发明提供的一种基于前向探测波束宽度指标进行引信宽波束赋形方法,包括:
[0114]
步骤1:确定弹目遭遇时,导弹速度矢量模值目标速度矢量模值交会角χ、探测距离r、脱靶量ρ、导弹攻角γ
m
、角度指向误差δθ、目标几何尺寸l0、数据处理时间t0取值,如导弹速度1000m/s~2000m/s、目标速度1000m/s~3000m/s、交会角0
°
~20
°
、探测距离200m~300m、脱靶量0m~8m、导弹攻角0
°
~5
°
、角度指向误差最大2
°
、目标几何尺寸8m~25m、数据处理时间最大2ms。
[0115]
步骤2:推导得到前向探测波束边界数学模型公式:
[0116]
θ0=max(2θ
10
,2θ
20
)
[0117]
式中:
[0118]
θ
10
=θ1' γ
m
δθ
[0119]
θ
20
=θ2' γ
m
δθ
[0120]
θ1'=η
‑
β0‑
α1[0121]
θ2'=η β0‑
α2[0122][0123][0124][0125]
[0126][0127][0128][0129][0130]
符号含义:
[0131]
导弹速度矢量,模值为m/s;
[0132]
目标速度矢量,模值为m/s;
[0133]
相对速度矢量,模值为m/s;
[0134]
χ:弹目交会角,
°
;
[0135]
ρ:脱靶量,m;
[0136]
t0:数据处理时间,s;
[0137]
r:前向探测距离,m;
[0138]
r0:经时间t0后前向探测距离,m;
[0139]
l0:目标最大尺寸,m;
[0140]
γ
m
:导弹攻角,
°
;
[0141]
δθ:角度指向误差,
°
;
[0142]
η:导弹速度矢量与相对速度矢量夹角,
°
;
[0143]
β0:目标几何中心所在方位与相对速度夹角,
°
;
[0144]
α1:脱靶方位1目标头部所在方位与相对速度夹角和β0角度差,
°
;
[0145]
α2:脱靶方位2目标头部所在方位与相对速度夹角和β0角度差,
°
;
[0146]
θ1':脱靶方位1目标头部和导弹的连线与弹轴夹角,
°
;
[0147]
θ2':脱靶方位2目标头部和导弹的连线与弹轴夹角,
°
;
[0148]
θ
10
:脱靶方位1前向探测单侧波束边界;
[0149]
θ
20
:脱靶方位2前向探测单侧波束边界;
[0150]
θ0:前向探测波束边界。
[0151]
步骤3:分析前向探测波束边界变化趋势,找出前向探测波束边界最大值;步骤1条件下,前向探测波束边界最大值出现在目标速度3000m/s、导弹速度1000m/s、交会角20
°
、探测距离200m、脱靶量8m、导弹攻角5
°
、目标几何尺寸8m、角度指向误差2
°
、数据处理时间2ms条件,计算得到的前向探测波束边界最大值为48.7
°
。
[0152]
步骤4:将计算得到的前向探测波束边界最大值48.7
°
,作为前向探测波束宽度取值,开展制导一体化引信前向宽波束赋形设计。
[0153]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统、装置及其各个模块以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统、装置及其各个模块以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同程序。所以,本发明提供的系统、装置及其各个模块可以被认为是一种硬件部件,而对其内包括的用于实现各种程序的模块也可以视为硬件部件内的结构;也可以将用于实现各种功能的模块视为既可以是实现方法的软件程序又可以是硬件部件内的结构。
[0154]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。