1.本实用新型涉及电缆技术领域,具体为一种机器人手臂用耐磨耐扭电缆。
背景技术:
2.电缆主要是用于传输电力和信号的,机器人手臂电缆在工业机器人中,例如焊接机器人,由于机器人手臂动作的复杂性,机器人手臂电缆需要能够经受得住反复的弯曲,且具有一定的耐磨性和抗拉强度高。
3.目前,市场的电缆存在弯曲性能较差,耐扭能力较弱,在使用过程中存在断线的风险,从而造成使用寿命降低的问题。
技术实现要素:
4.本实用新型的目的在于提供一种机器人手臂用耐磨耐扭电缆,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种机器人手臂用耐磨耐扭电缆,包括填充棉线,以所述填充棉线为中心呈圆环形均匀分布的芯线,挤包设于所述芯线外的绕包带,挤包设于所述绕包带的乙丙橡胶内护套,设于所述芯线和所述乙丙橡胶内护套之间的弹性填充条,挤包设于所述乙丙橡胶内护套外的屏蔽层,以及挤包设于所述屏蔽层外的聚四氟乙烯外护套;所述弹性填充条包括第一半圆块,开设于所述第一半圆块上的第一通孔,关于所述第一半圆块对称设置的两个第二半圆块,以及开设于所述第二半圆块上的第二通孔,所述第一通孔呈椭圆形,且所述第一通孔的长轴沿填充棉线的径向分布,所述第二通孔呈圆形,所述乙丙橡胶内护套的内壁一体成型有用于抱夹两个所述第二半圆块的凸棱。
6.可选的,所述芯线包括铜导体,以及挤包设于所述铜导体外的绝缘层;所述铜导体由无氧铜丝精绞而成,所述绝缘层为聚烯烃热塑性弹性体套。
7.可选的,所述芯线和所述弹性填充条的数目相同,且所述芯线和所述弹性填充条在同一个圆周上呈交错分布。
8.可选的,所述第一通孔的长轴与其短轴长度比为2:1;所述第一通孔的短轴长度等于第二通孔的直径长度。
9.可选的,所述屏蔽层为镀锡铜网屏蔽层,且所述屏蔽层的厚度为0.52~0.70mm。
10.与现有技术相比,本实用新型提供了一种机器人手臂用耐磨耐扭电缆,具备以下有益效果:
11.1.本实用新型通过弹性填充条向相邻的两个芯线挤压,实现将绕包带绷紧,提高电缆内部的紧密度,电缆整体规整,耐扭能力强;
12.2.本实用新型通过凸棱用于限制弹性填充条在电缆内部的位置,使得弹性填充条与乙丙橡胶内护套排布紧密,有效防止弹性填充条与芯线在电缆内部发生周向滑动。
附图说明
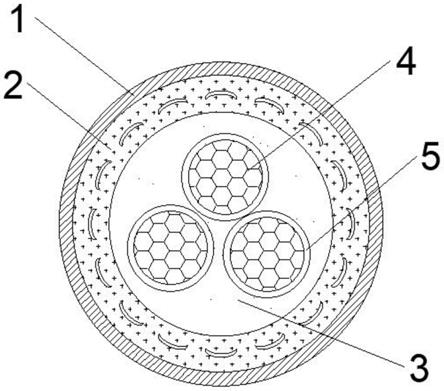
13.图1为本实用新型整体的结构示意图;
14.图2为本实用新型中弹性填充条的结构示意图。
15.图中:1、填充棉线;2、芯线;3、绕包带;4、弹性填充条;401、第一半圆块;402、第一通孔;403、第二半圆块;404、第二通孔;5、乙丙橡胶内护套;501、凸棱;6、屏蔽层;7、聚四氟乙烯外护套。
具体实施方式
16.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
17.实施例:请参阅图1,本实用新型提供了一种机器人手臂用耐磨耐扭电缆,包括填充棉线1,以填充棉线1为中心呈圆环形均匀分布的芯线2,挤包设于芯线2外的绕包带3,挤包设于绕包带3的乙丙橡胶内护套5,设于芯线2和乙丙橡胶内护套5之间的弹性填充条4,挤包设于乙丙橡胶内护套5外的屏蔽层6,以及挤包设于屏蔽层6外的聚四氟乙烯外护套7。
18.其中,填充棉线1为芯线2的排列构成紧密扎实的支撑,以避免电缆在曲折时造成压扁的现象;芯线2由铜导体,以及挤包设于铜导体外的绝缘层构成,铜导体采用无氧铜丝精绞而成,绝缘层采用聚烯烃热塑性弹性体套,耐屈曲疲劳性良好、弹性佳;屏蔽层6为镀锡铜网屏蔽层,且屏蔽层6的平均厚度为0.6mm,屏蔽层6的最小厚度为0.52mm;聚四氟乙烯外护套7具有优良的化学稳定性、耐腐蚀性和耐磨性,提高了电缆表面的耐磨能力。
19.请参阅图2,弹性填充条4由pvc浇注而成,弹性填充条4上一体成型有第一半圆块401和第二半圆块403。第一半圆块401上开设有第一通孔402,第一通孔402呈椭圆形,且第一通孔402的长轴沿填充棉线1的径向分布。第二半圆块403设有两个,两个第二半圆块403关于第一半圆块401对称设置,第二半圆块403上开设有第二通孔404,第二通孔404呈圆形。其中,第一通孔402的长轴与其短轴长度比为2:1;第一通孔402的短轴长度等于第二通孔404的直径长度。
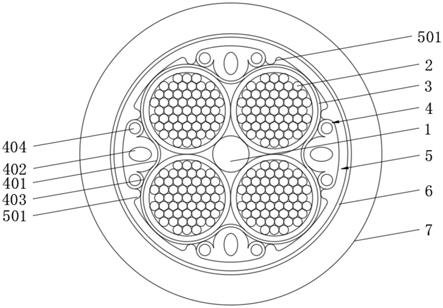
20.请参阅图1,芯线2和弹性填充条4的数目相同,均设有四个,且芯线2和弹性填充条4在同一个圆周上呈交错分布。四个弹性填充条4上的第一半圆块401分别向相邻的两个芯线2挤压,实现将绕包带3绷紧,提高电缆内部的紧密度,电缆整体规整,耐扭能力强。当电缆受到外界弯曲压力时,乙丙橡胶内护套5会挤压弹性填充条4,第一通孔402和第二通孔404为弹性填充条4弯曲变形提供空间,提高了弹性填充条4的柔韧度,从而提高电缆的柔性,特别的,呈椭圆形的第一通孔402增大了弹性填充条4在电缆径向方向上的变形量,进一步的在电缆径向方向上提高了弹性填充条4的柔韧度。
21.请参阅图1,乙丙橡胶内护套5的内壁一体成型有用于抱夹两个第二半圆块403的凸棱501,凸棱501用于限制弹性填充条4在电缆内部的位置,使得弹性填充条4与乙丙橡胶内护套5排布紧密,有效防止弹性填充条4与芯线2在电缆内部发生周向滑动。
22.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修
改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
技术特征:
1.一种机器人手臂用耐磨耐扭电缆,其特征在于:包括填充棉线(1),以所述填充棉线(1)为中心呈圆环形均匀分布的芯线(2),挤包设于所述芯线(2)外的绕包带(3),挤包设于所述绕包带(3)的乙丙橡胶内护套(5),设于所述芯线(2)和所述乙丙橡胶内护套(5)之间的弹性填充条(4),挤包设于所述乙丙橡胶内护套(5)外的屏蔽层(6),以及挤包设于所述屏蔽层(6)外的聚四氟乙烯外护套(7);所述弹性填充条(4)包括第一半圆块(401),开设于所述第一半圆块(401)上的第一通孔(402),关于所述第一半圆块(401)对称设置的两个第二半圆块(403),以及开设于所述第二半圆块(403)上的第二通孔(404),所述第一通孔(402)呈椭圆形,且所述第一通孔(402)的长轴沿填充棉线(1)的径向分布,所述第二通孔(404)呈圆形,所述乙丙橡胶内护套(5)的内壁一体成型有用于抱夹两个所述第二半圆块(403)的凸棱(501)。2.根据权利要求1所述的一种机器人手臂用耐磨耐扭电缆,其特征在于:所述芯线(2)包括铜导体,以及挤包设于所述铜导体外的绝缘层;所述铜导体由无氧铜丝精绞而成,所述绝缘层为聚烯烃热塑性弹性体套。3.根据权利要求1所述的一种机器人手臂用耐磨耐扭电缆,其特征在于:所述芯线(2)和所述弹性填充条(4)的数目相同,且所述芯线(2)和所述弹性填充条(4)在同一个圆周上呈交错分布。4.根据权利要求1所述的一种机器人手臂用耐磨耐扭电缆,其特征在于:所述第一通孔(402)的长轴与其短轴长度比为2:1;所述第一通孔(402)的短轴长度等于第二通孔(404)的直径长度。5.根据权利要求1所述的一种机器人手臂用耐磨耐扭电缆,其特征在于:所述屏蔽层(6)为镀锡铜网屏蔽层,且所述屏蔽层(6)的厚度为0.52~0.70mm。
技术总结
本实用新型涉及电缆技术领域,具体为一种机器人手臂用耐磨耐扭电缆,包括填充棉线,芯线,绕包带,乙丙橡胶内护套,弹性填充条,屏蔽层,以及聚四氟乙烯外护套;弹性填充条包括第一半圆块,开设于第一半圆块上的第一通孔,关于第一半圆块对称设置的两个第二半圆块,以及开设于第二半圆块上的第二通孔,第一通孔呈椭圆形,且第一通孔的长轴沿填充棉线的径向分布,第二通孔呈圆形,乙丙橡胶内护套的内壁一体成型有用于抱夹两个第二半圆块的凸棱。本实用新型通过弹性填充条向相邻的两个芯线挤压,实现将绕包带绷紧,提高电缆内部的紧密度,电缆整体规整,耐扭能力强。耐扭能力强。耐扭能力强。
技术研发人员:孙善洋
受保护的技术使用者:上海京峰电线电缆有限公司
技术研发日:2021.01.11
技术公布日:2021/10/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。