1.本技术涉及信号轮充磁加工的领域,尤其是涉及一种供磁信号轮进行充磁的充磁装置。
背景技术:
2.信号轮是汽车曲轴中十分重要的一部分,信号轮与曲轴传感器相配合,曲轴传感器通过读取齿数来确定曲轴位置,即发动机当前位置,以便打火。随着汽车行业的高速发展,普通的信号轮由于加工复杂已逐渐被磁信号轮所取代。
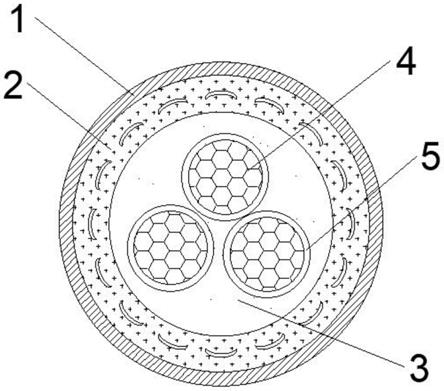
3.磁信号轮生产制造的复杂程度低,加工后只需充磁即可投入使用。具体请参考授权公告号为cn208672660u的中国专利,其公开了一种充磁橡胶转速信号轮,包括轮体、充磁橡胶圈和霍尔传感器,轮体具有主体部和安装部,安装部绕主体部的边缘周向设置;充磁橡胶圈套装在安装部上,充磁橡胶圈包括强磁段和弱磁段,强磁段与弱磁段连接组成磁段组件,磁段组件绕安装部形成充磁橡胶圈;霍尔传感器的感应头部正对且靠近充磁橡胶圈。
4.由相关技术可知,目前对磁信号轮进行充磁主要是采用充磁机,参照图1,充磁机包括充磁台机构2以及位于充磁台机构2正上方的充磁头机构3,充磁台机构2的上表面安装有用于对磁信号轮6进行定位的中心轴28,作业时,充磁头机构3向下运动并对磁信号轮6进行充磁。
5.但发明人根据多年的加工经验发现,传统充磁机对磁信号轮进行定位的效果较差,易导致充磁偏差。
技术实现要素:
6.为了提高定位效果,降低充磁偏差,本技术提供一种供磁信号轮进行充磁的充磁装置。
7.本技术提供的一种供磁信号轮进行充磁的充磁装置,采用如下的技术方案:
8.一种供磁信号轮进行充磁的充磁装置,包括充磁模块座、安装在充磁模块座上用于承载磁信号轮的支撑组件、位于支撑组件正上方的充磁头机构,以及用于对磁信号轮进行张紧固定的张紧组件;
9.支撑组件包括安装在充磁模块座上的轴座、固定于轴座上的主轴、套设于主轴外部的支撑筒,以及固定于支撑筒远离轴座一端且套设于主轴外部的支撑盘;
10.张紧组件包括滑动套设在主轴上并通过自身形变以对磁信号轮进行张紧定位的张紧件、位于轴座正下方的动力源,以及用于连接张紧件和动力源的传动部,张紧件高于支撑盘的上表面、低于主轴的上端面。
11.通过采用上述技术方案,作业时,将磁信号轮放置在支撑盘上,然后开启动力源,使传动部带动张紧件沿主轴移动,移动的过程中,张紧件发生形变并对磁信号轮进行张紧固定,与传统的充磁机相比,本技术中的充磁装置大大提高了对磁信号轮的定位效果,降低了充磁偏差。
12.优选的,所述主轴的外壁上加工有多个呈圆周等距分布的让位切削槽,让位切削槽由主轴远离轴座的一端沿主轴轴向开设,相邻让位切削槽之间形成块状体,块状体背离主轴轴线一侧且远离轴座一端的外侧壁上加工有由下至上、由外至内逐渐倾斜的第一导向锥面;
13.张紧件包括实心的配重座以及与配重座一体成型的形变部,形变部为柱状筒,柱状筒由远离配重座的一端开设有多个沿柱状筒轴向延伸且呈圆周等距分布的分隔槽,相邻分隔槽之间形成张紧板,每块张紧板上对应第一导向锥面的位置均加工有与第一导向锥面相配合以使张紧板在滑动过程中产生形变的第二导向锥面,配重座与传动部相连接。
14.通过采用上述技术方案,动力源可驱动张紧件沿主轴滑动,移动的过程中,张紧板受第一导向锥面和第二导向锥面的影响发生形变,即张紧板逐渐向外张开,从而夹紧磁信号轮的中心孔的内壁,实现对磁信号轮的固定。
15.优选的,每块所述张紧板上与让位切削槽相对应的位置均开设有让位缺口。
16.通过采用上述技术方案,主要用于减小张紧板形变时所需克服的阻力。
17.优选的,相邻所述张紧板之间靠近配重座一端的位置均加工有与分隔槽相连通的圆孔。
18.通过采用上述技术方案,一方面能够避免张紧板与配重座的连接处应力集中,另一方面能够减小张紧板形变时所需克服的阻力。
19.优选的,所述传动部包括位于轴座正下方的拉板、滑动穿设于轴座上且两端分别与配重座和拉板固接的导向杆,以及套设在导向杆上且两端分别与拉板和轴座相抵接的张紧弹簧;
20.动力源为紧凑型气缸,紧凑型气缸安装在充磁模块座位于拉板正下方的位置。
21.通过采用上述技术方案,初始状态下,紧凑型气缸的活塞杆伸缩并对拉板施加向上的推力,使得张紧弹簧被压缩,此时,第二导向锥面与第一导向锥面完全贴合;当磁信号轮就位后,启动紧凑型气缸,使活塞杆收缩并逐渐与拉板分离,此时,张紧件在自身重力以及张紧弹簧恢复力的作用下沿主轴向下移动,移动的过程中,张紧板受第一导向锥面和第二导向锥面的影响发生形变,即张紧板逐渐向外张开。
22.优选的,所述拉板的中心处滑动穿设一根与主轴同轴线设置的螺套,螺套的一端与轴座的下表面固定连接。
23.通过采用上述技术方案,拉板移动的过程中,螺套对拉板进行导向,从而提高张紧件动作时的稳定性。
24.优选的,所述支撑盘远离支撑筒的一侧设有与异形孔相对应的零点限位销以及位于零点限位销两侧且与检测孔相对应的定位销。
25.通过采用上述技术方案,放置时,将磁信号轮的中心孔对准主轴、异形孔对准零点限位销、检测孔对准定位销后,直接套在主轴上即可;零点限位销和定位销的设置,主要用于对磁信号轮进行辅助定位。
26.优选的,位于所述支撑组件一侧的充磁模块座上安装有与支撑盘等高的光电传感器。
27.通过采用上述技术方案,主要用于检测支撑盘上是否放置有磁信号轮。
28.优选的,还包括龙门架以及安装在龙门架上以驱动充磁头机构进行升降的驱动
源。
29.通过采用上述技术方案,驱动源的设置,可驱动充磁头进行升降,以便充磁作业。
30.优选的,所述驱动源包括安装在龙门架的横梁上且活塞杆朝下竖直布置的导向气缸,以及固接在导向气缸的活塞杆上且水平布置的吊板;充磁头机构包括与吊板固定连接的工装板、固定在工装板背离吊板一侧的磁化筒,以及嵌设安装在磁化筒内的环形磁化头。
31.通过采用上述技术方案,作业时,通过导向气缸带动充磁头机构向下移动,直到环形磁化头套在磁信号轮的外部以进行充磁。
32.综上所述,本技术包括以下至少一种有益技术效果:
33.本技术中的充磁装置与传统的充磁机相比,大大提高了对磁信号轮的定位效果,降低了充磁偏差;具体为:作业时,将磁信号轮放置在支撑盘上,然后开启动力源,使传动部带动张紧件沿主轴移动,移动的过程中,张紧件发生形变并对磁信号轮进行张紧固定。
附图说明
34.图1是本技术背景技术的结构示意图;
35.图2是本技术实施例的充磁装置的整体结构示意图;
36.图3是体现充磁台机构整体的结构示意图;
37.图4是体现模块座侧板具体结构的示意图;
38.图5是体现第二顶板具体结构的示意图;
39.图6是体现定位部、第一顶板和模块座侧板之间连接关系的剖视图;
40.图7是体现定位部整体结构的示意图;
41.图8是体现固定部和模块座侧板之间连接关系的结构示意图;
42.图9是体现充磁台机构具体结构的剖视图;
43.图10是体现主轴结构的示意图;
44.图11是体现磁信号轮的结构示意图;
45.图12是体现支撑盘上零点限位销和定位销位置关系的结构示意图;
46.图13是体现张紧件具体结构的示意图;
47.图14是体现张紧组件具体结构的三维立体图;
48.图15是体现充磁头机构具体结构,以及充磁头机构与充磁台机构之间配合关系的结构示意图。
49.附图标记说明:1、龙门架;2、充磁台机构;21、充磁模块座;211、模块座底板;212、模块座侧板;2121、支撑面;2122、挡边;2123、台阶通孔;2124、u形槽;2125、条形安装槽;213、模块座顶板;214、第二顶板;2141、直切槽;2142、让位槽;215、压板;216、把手;217、滑板;218、缺口槽;219、方板;22、支撑组件;221、深沟球轴承;222、轴座;223、主轴;2231、让位切削槽;2232、块状体;2233、第一导向锥面;224、支撑筒;2241、支撑盘;225、垫筒;226、零点限位销;229、定位销;23、张紧组件;231、张紧件;2311、配重座;2312、分隔槽;2313、张紧板;2314、圆孔;2315、让位缺口;2316、第二导向锥面;232、拉板;233、导向杆;234、张紧弹簧;235、紧凑型气缸;236、螺套;24、光电传感器;25、支撑座;26、l形板;27、第一接近传感器;28、中心轴;3、充磁头机构;31、工装板;311、安装块;34、磁化筒;37、高度杆;371、高度头;4、驱动源;41、导向气缸;42、吊板;6、磁信号轮;61、轮本体;62、中心孔;63、检测孔;64、异形
孔;7、定位部;71、衬套;711、翻边;72、柱塞座;721、导套;722、套筒;723、凸沿;724、法兰盘;725、阶梯通孔;726、限位滑槽;73、柱塞杆组件;731、插杆;732、连杆;733、握持部;734、限位杆;74、电感式传感器;8、固定部;81、销轴;82、套环;83、螺纹杆;84、法兰螺母。
具体实施方式
50.以下结合附图2
‑
15对本技术作进一步详细说明。
51.本技术实施例公开了一种供磁信号轮进行充磁的充磁装置。参照图2,充磁装置包括龙门架1、设置在龙门架1下方的充磁台机构2、位于充磁台机构2正上方的充磁头机构3,以及安装在龙门架1上且与充磁头机构3相连接的驱动源4;龙门架1为龙门架,其具体结构可根据实际需要进行设计;充磁台机构2的主要作用是供待充磁的磁信号轮6放置,并对磁信号轮6进行初步定位;驱动源4的主要作用是驱动充磁头机构3升降,从而与充磁台机构2配合,对放置在充磁台机构2上的磁信号轮6进行充磁作业。
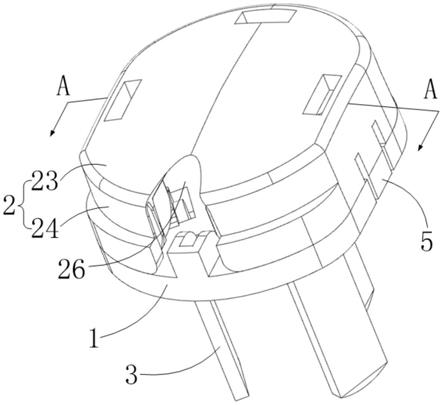
52.参照图3,充磁台机构2包括充磁模块座21以及设置在充磁模块座21上的支撑组件22和张紧组件23,其中,支撑组件22的主要作用是对磁信号轮6进行承载支撑;张紧组件23的主要作用是对磁信号轮6进行张紧定位。
53.充磁模块座21包括水平设置的模块座底板211、固接在模块座底板211一侧且相互平行的两模块座侧板212,以及与模块座底板211相对设置的模块座顶板,模块座顶板可拆卸安装于两模块座侧板212上。
54.参照图3和图4,更具体的是,模块座侧板212呈横放的日字形结构,模块座侧板212远离模块座底板211的一侧为支撑面2121,两模块座侧板212的支撑面2121上且靠外的一侧均加工有挡边2122,挡边2122与支撑面2121的长度相同,模块座顶板安装在两模块座侧板212的支撑面2121上并位于两挡边2122之间。模块座顶板包括固定于两模块座侧板212的支撑面2121上的第一顶板213和活动放置于两模块座侧板212的支撑面2121上的第二顶板214,第一顶板213和第二顶板214均为矩形,且第一顶板213的尺寸小于第二顶板214的尺寸,在本实施例中,第一顶板213可通过内六角圆柱头螺钉固定于支撑面2121上。
55.第一顶板213上表面且位于两端的位置分别固接有沿支撑面2121长度方向延伸的压板215,压板215的一端探出第一顶板213并且探出部分与支撑面2121之间形成夹持腔。
56.参照图4和图5,第二顶板214上表面且位于一端的位置安装有把手216,第二顶板214下表面与两模块座侧板212搭接的位置分别加工有直切槽2141,直切槽2141内固接有与第二顶板214等长且表面平齐的滑板217,滑板217的两端及支撑面2121远离第一顶板213的一端均加工便于第二顶板214安装的坡面。
57.参照图3和图4,安装时,将第二顶板214搭接在两支撑面2121上并沿挡边2122推动,推动的过程中,挡边2122可对第二顶板214进行限位和导向,直到第二顶板214的一端伸入夹持腔内并且与第一顶板213相抵接,此时,第二顶板214的上表面与第一顶板213的上表面平齐。
58.参照图3和图6,第二顶板214与两模块座侧板212之间均设有定位部7,挡边2122、压板215、定位部7之间分别在x、y、z三个方向上对第二顶板214进行定位,从而保证第二顶板214的安装精度。定位部7包括嵌设在模块座侧板212内的衬套71、安装在第二顶板214上的柱塞座72以及滑动设置于柱塞座72上的柱塞杆组件73,柱塞杆组件73可伸入衬套71内并
且与衬套71插接配合,从而对第二顶板214进行定位。
59.参照图4和图6,模块座侧板212位于自身口字型区域的支撑面2121上开设有台阶通孔2123;衬套71为内部中空且两端为开口的圆柱筒,衬套71的一端一体成型有搭接在台阶通孔2123的台阶面上的翻边711,并且翻边711的表面与模块座侧板212的表面平齐。
60.参照图5和图6,第二顶板214和滑板217对应台阶通孔2123的位置均加工有缺口槽218,缺口槽218由第二顶板214一侧沿第二顶板214的宽度方向水平向内开设,当第二顶板214就位后,缺口槽218与台阶通孔2123相连通。柱塞座72包括筒状的导套721以及螺纹连接在导套721外侧壁上的套筒722,导套721的长度大于套筒722,在导套721靠近一端的外侧壁上径向延伸有供套筒722端部抵接的凸沿723,在套筒722远离凸沿723的一端一体成型有法兰盘724,法兰盘724通过螺钉固定于第二顶板214的上表面,使得套筒722嵌设至缺口槽218内,此时,导套721位于缺口槽218内的一端高于支撑面2121。
61.导套721的内部贯穿开设有沿自身轴线方向延伸的阶梯通孔725,阶梯通孔725的大孔靠近凸沿723设置;柱塞杆组件73包括滑动设置于阶梯通孔725的大孔内的插杆731、连接于插杆731一端且由阶梯通孔725的小孔滑动伸出导套721的连杆732,以及与连杆732一体成型的握持部733,握持部733呈球状,且握持部733的直径大于导套721的直径,当握持部733与导套721远离凸沿723的一端相抵接时,插杆731的自由端伸出导套721。
62.参照图6和图7,连杆732位于阶梯通孔725的小孔内的杆体上垂直固接有一对伸出导套721的限位杆734,两限位杆734对称设置,导套721对应限位杆734伸出的位置加工有限位滑槽726,限位滑槽726由远离凸沿723的一端沿导套721轴向开设,通常情况下,即第二顶板214在未安装的状态下,限位杆734由限位滑槽726的开口端滑出并且相对限位滑槽726错位抵接于导套721远离凸沿723的一端,此时,插杆731完全收纳在导套721内。
63.当第二顶板214就位后,转动握持部733,使限位杆734与限位滑槽726对准并沿限位滑槽726向下滑动,当握持部733与导套721远离凸沿723的一端相抵接时,插杆731伸入衬套71内,实现对第二顶板214的进一步定位。
64.参照图6,衬套71的正下方安装有电感式传感器74,主要用于检测插杆731是否与衬套71对中,从而保证第二顶板214安装的顺利进行。
65.参照图4和图8,为提高第二顶板214安装后的稳定性,在两模块座侧板212上还设有固定部8,固定部8位于定位部7的一侧,主要用于对第二顶板214进行牢靠固定。定位部7包括销轴81、套设在销轴81上的套环82、固接在套环82外壁上的螺纹杆83以及螺纹连接在螺纹杆83上的法兰螺母84;模块座侧板212上加工有由支撑面2121向模块座底板211方向延伸的u形槽2124,u形槽2124的两侧沿模块座侧板212的宽度方向贯穿,套环82位于u形槽2124内,并且套环82轴向的两侧分别与u形槽2124的内壁抵接,模块座侧板212由靠近把手216的一侧还向内加工有条形安装槽2125,条形安装槽2125与u形槽2124之间呈十字形设置,销轴81嵌设于条形安装槽2125内,使得螺纹杆83能够在u形槽2124内自由转动,在模块座侧板212对应条形安装槽2125的位置固定有方板219,防止销轴81从条形安装槽2125内脱出;第二顶板214对应u形槽2124的位置开设有让位槽2142。
66.操作时,将螺纹杆83转动至竖直状态,然后通过法兰螺母84与螺纹杆83螺纹连接,从而将第二顶板214夹紧固定在模块座侧板212的支撑面2121上。
67.参照图9和图10,上述的支撑组件22包括通过深沟球轴承221转动设置在第二顶板
214上的轴座222,第二顶板214对应轴座222的位置开设有供轴座222贯穿的固定孔,轴座222上固接有与自身同轴线且竖直设置的主轴223,主轴223的外壁上加工有四个呈圆周等距分布的让位切削槽2231,让位切削槽2231由主轴223远离轴座222的一端沿主轴223轴向开设,相邻让位切削槽2231之间形成块状体2232,块状体2232背离主轴223轴线一侧且远离轴座222一端的外侧壁上加工有由下至上、由外至内逐渐倾斜的第一导向锥面2233。
68.主轴223的外部同轴套设有与轴座222固定连接的支撑筒224,支撑筒224的外部同轴套设有与轴座222固定连接的垫筒225,垫筒225的顶端低于支撑筒224的顶端。在支撑筒224远离轴座222的一端固接有套设于主轴223外部且水平设置的支撑盘2241,支撑盘2241的上表面低于主轴223,磁信号轮6可放置于支撑盘2241上。
69.参照图11,需要说明的是,磁信号轮6包括轮本体61,轮本体61的圆周面为充磁面,充磁面上充有多个间隔设置的强磁段和弱磁段。轮本体61的中心处开设有用于供主轴223穿过的中心孔62,轮本体61上环绕中心孔62的位置开设有多个呈圆周等距分布的检测孔63,其中一相邻的两检测孔63之间开设有异形孔64。
70.参照图11和图12,支撑盘2241的上表面设有一零点限位销226以及位于零点限位销226两侧的定位销229,零点限位销226与异形孔64相对应,两定位销229与磁信号轮6上异形孔64两侧的检测孔63的位置一一对应。
71.参照图9、图11和图12,放置时,将磁信号轮6的中心孔62对准主轴223、异形孔64对准零点限位销226、检测孔63对准定位销229后,直接套在主轴223上即可。
72.参照图9,第二顶板214上位于支撑组件22一侧的位置设有光电传感器24,光电传感器24通过支撑座25安装于第二顶板214的上表面,主要用于检测支撑盘2241上是否放置有磁信号轮6。
73.参照图9,上述的张紧组件23包括滑动套设在主轴223上且位于支撑筒224内的张紧件231、位于轴座正下方的动力源,以及用于连接张紧件231和动力源的传动部;传动部包括位于轴座222正下方的拉板232、滑动穿设于轴座222上且两端分别与张紧件231和拉板232固接的导向杆233,以及套设在导向杆233上且两端分别与拉板232和轴座222相抵接的张紧弹簧234;动力源为紧凑型气缸235,紧凑型气缸235安装在模块座底板211上且位于拉板232的正下方,磁信号轮6就位时,张紧件231穿过磁信号轮6的中心孔62。
74.参照图9和图13,张紧件231包括实心的配重座2311以及与配重座2311一体成型的形变部,配重座2311与轴座222之间存在活动空间,导向杆233的一端固定在配重座2311远离形变部的一侧;形变部为柱状筒,其具有一定的弹性和刚性,柱状筒由远离配重座2311的一端开设有多个沿柱状筒轴向延伸且呈圆周等距分布的分隔槽2312,相邻分隔槽2312之间形成张紧板2313,相邻张紧板2313之间靠近配重座2311一端的位置均加工有与分隔槽2312相连通的圆孔2314,圆孔2314一方面能够避免张紧板2313与配重座2311的连接处应力集中,另一方面能够减小张紧板2313形变时所需克服的阻力。
75.参照图10和图13,每块张紧板2313上与主轴223的让位切削槽2231相对应的位置均开设有让位缺口2315,并且在每块张紧板2313上对应主轴223的第一导向锥面2233的位置均加工有用于与第一导向锥面2233相配合的第二导向锥面2316。
76.参照图9、图10和图13,初始状态下,紧凑型气缸235的活塞杆伸缩并对拉板232施加向上的推力,使得张紧弹簧234被压缩,此时,第二导向锥面2316与第一导向锥面2233完
全贴合;当磁信号轮6就位后,启动紧凑型气缸235,使活塞杆收缩并逐渐与拉板232分离,此时,张紧件231在自身重力以及张紧弹簧234恢复力的作用下沿主轴223向下移动,移动的过程中,张紧板2313受第一导向锥面2233和第二导向锥面2316的影响发生形变,即张紧板2313逐渐向外张开,从而夹紧磁信号轮6的中心孔62的内壁,大大提高了对磁信号轮6的定位效果,降低了充磁偏差。
77.参照图10和图14,为保证张紧件231作业时的稳定性,在拉板232的中心处滑动穿设一根与主轴223同轴线设置的螺套236,螺套236的一端与轴座222的下表面固定连接,拉板232移动的过程中,螺套236对拉板232进行导向。
78.参照图15,驱动源4包括安装在龙门架1的横梁上的导向气缸41,导向气缸41的活塞杆竖直朝下布置,在导向气缸41的活塞杆的自由端固接有水平布置的吊板42,吊板42呈矩形;充磁头机构3包括与吊板42可拆卸连接且呈矩形的工装板31、固定在工装板31背离吊板42一侧的磁化筒34,以及嵌设安装在磁化筒34内且与磁化组件(未画出)相连接的环形磁化头;工装板31远离转接板33的一侧对称固接有两安装块311,吊板42通过螺栓连接在两安装块311上。
79.作业时,通过导向气缸41带动充磁头机构3向下移动,直到环形磁化头套在磁信号轮6的外部以进行充磁。
80.工装板31下表面且靠近一角的位置安装有沿定位轴32轴向延伸的高度杆37,高度杆37上螺纹连接有可调节的高度头371,位于高度杆37正下方的位置设有通过l形板26固定于第二顶板214上表面的第一接近传感器27,第一接近传感器27的检测头朝向高度头371,当充磁头机构3就位时,高度头371与第一接近传感器27接触,实现信号连通,主要用于检测环形磁化头是否下降到位,从而保证充磁作业的顺利进行。
81.本技术实施例的实施原理为:
82.第一步:将待充磁的磁信号轮6放置在支撑盘2241上;
83.第二步:通过光电传感器24检测待充磁的磁信号轮6是否就位,若就位,则启动导向气缸41,驱动充磁头机构3下降;
84.第三步:驱动充磁头机构3下降的过程中,通过第一接近传感器27检测充磁头机构3是否就位;
85.第四步:充磁头机构3就位且磁信号轮6的平行度符合要求后,启动紧凑型气缸235,使张紧板2313在重力作用以及第一导向锥面2233和第二导向锥面2316的导向作用下逐渐向外张开,并对磁信号轮6进行夹紧固定;
86.第五步:环形磁化头对磁信号轮6进行充磁作业;
87.第六步:充磁完成后,紧凑型气缸235和导向气缸41依次复位,将磁信号轮6取走后,循环往复。
88.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。