一种天线及无人飞行器
【技术领域】
1.本发明涉及无人机天线技术领域,特别是涉及一种天线及无人飞行器。
背景技术:
2.无人飞行器,是一种利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器。无线通信链路系统作为无人飞行器系统的重要组成部分,用于建立空地双向数据传输通道,以完成地面控制站对无人机的远距离遥控、遥测和任务信息传输。
3.现有的无线通信链路系统一般分为机载部分与地面部分。机载部分包括机载数据终端(adt)和天线,机载数据终端包括rf接收机、发射机以及用于连接接收机和发射机到系统其它部分的调制解调器。地面部分也称地面数据终端(gdt),该终端包括一副或多副天线、rf接收机和发射机以及调制解调器。
4.发明人在实现本发明的过程中,发现:现有的无人飞行器通常会在起落架内置双频天线,而双频天线为保证任务信息传输质量,会不可避免地增大体积,但天线的体积过大,又不易收容于起落架内,不利于无人飞行器的小型化设计。
技术实现要素:
5.为了解决上述技术问题,本发明实施例提供一种天线及无人飞行器,以解决现有的天线为保证任务信息传输质量而产生天线体积过大的问题。
6.本发明实施例解决其技术问题采用以下技术方案:
7.第一方面,提供一种天线,包括:
8.基板;
9.振子结构,所述振子结构设于所述基板的一面,所述振子结构包括第一振子和第二振子,所述第一振子具有第一谐振频率,所述第二振子具有第二谐振频率;
10.引向器,所述引向器设于所述基板背离所述振子结构的一面,所述引向器沿第一方向设于所述振子结构的一侧;
11.馈电同轴线,所述馈电同轴线设于所述基板背离所述振子结构的一面,所述馈电同轴线分别与所述第一振子和所述第二振子电连接。
12.可选地,所述第一振子包括第一辐射部和第二辐射部,所述第一辐射部和所述第二辐射部沿第二方向设于所述振子结构相对的两侧;
13.所述第二振子包括第三辐射部和第四辐射部,所述第三辐射部和所述第四辐射部沿第二方向设于所述振子结构相对的两侧;
14.所述第一辐射部与所述第三辐射部连接,所述第二辐射部与所述第四辐射部连接;
15.其中,所述第二方向与所述第一方向垂直。
16.可选地,所述第一辐射部包括第一微带线和第二微带线,所述第一微带线沿第一方向设置,所述第二微带线沿第二方向设置;
17.所述第二微带线自所述第一微带线的一端朝背离所述第二辐射部的方向延伸。
18.可选地,所述第三辐射部包括所述第一微带线、第三微带线以及第四微带线;
19.所述第三微带线沿第二方向设置,所述第三微带线自所述第一微带线的中部朝背离所述第二辐射部的方向延伸,所述第三微带线的两端分别连接所述第一微带线和所述第四微带线。
20.可选地,所述第四微带线包括依次连接的第一线部、第二线部以及第三线部;
21.所述第一线部的一端和所述第二线部的一端分别连接所述第三微带线,所述第一线部的另一端和所述第二线部的另一端分别沿相互背离的方向延伸;
22.所述第三线部自所述第二线部背离所述第一线部的一端朝向所述第一微带线的方向延伸。
23.可选地,所述第二微带线的数量为两个,两个所述第二微带线分别连接于所述第一微带线的两端;
24.沿第一方向,两个所述第二微带线相对于所述第三微带线对称设置。
25.可选地,沿第一方向,所述引向器设于所述其中一个所述第二微带线背离另一个所述微带线的一侧,且所述引向器位于所述第三微带线朝向所述第三线部的一侧。
26.可选地,所述基板设有第一通槽,所述第一通槽设于所述第二微带线和所述第三微带线之间。
27.可选地,所述基板上设有第一馈电孔,所述第一微带线通过所述第一馈电孔与所述馈电同轴线的内导体电连接。
28.可选地,所述第二辐射部包括第五微带线和第六微带线,所述第五微带线沿第一方向设置,所述第六微带线沿第二方向设置;
29.所述第六微带线自所述第五微带线的一端朝背离所述第一辐射部的方向延伸。
30.可选地,所述第四辐射部包括所述第五微带线、第七微带线以及第八微带线;
31.所述第七微带线沿第二方向设置,所述第七微带线自所述第五微带线的中部朝背离所述第一辐射部的方向延伸,所述第七微带线的两端分别连接所述第五微带线和所述第八微带线。
32.可选地,所述第六微带线的数量为两个,两个所述第六微带线分别连接于所述第一微带线的两端;
33.沿第一方向,两个所述第六微带线相对于所述第七微带线对称设置。
34.可选地,所述基板设有第二通槽,所述第二通槽设于所述第六微带线和所述第七微带线之间。
35.可选地,所述基板上设有第二馈电孔,所述第五微带线通过所述第二馈电孔与所述馈电同轴线的外导体电连接。
36.可选地,所述基板上还设有二次接地点,所述馈电同轴线与所述二次接地点电连接。
37.可选地,所述第一谐振频率为5.8ghz,所述第二谐振频率为2.4ghz。
38.第二方面,提供一种无人飞行器,包括:
39.机体;
40.动力组件,所述动力组件安装于所述机体,所述动力组件用于为所述无人飞行器
提供飞行动力;
41.控制装置,所述控制装置安装于所述机体,所述控制装置与所述动力组件电连接;
42.起落架,所述起落架安装于所述机体,所述起落架用于支撑所述机体;
43.如上述任一项所述的天线,所述天线安装于所述起落架内,所述天线与所述控制装置电连接。
44.与现有技术相比较,本发明实施例中的天线通过调整第一振子与第一振子在基板上的布局方式以实现天线的最佳阻抗匹配,并且通过引向器改善第一振子的第一谐振频率信号的方向性,使第一谐振频率的辐射方向朝工作方向偏移,进而调整工作方向的谐振频率信号,使得天线在高频段具有定向性,在低频段具有良好的全向性,在保证任务信息传输质量的同时也能够收容于起落架,满足内置的空间尺寸要求,有利于无人飞行器的小型化设计。
【附图说明】
45.一个或多个实施例通过与之对应的附图进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
46.图1为本发明其中一实施例提供的一种无人飞行器的结构示意图;
47.图2为图1所示的无人飞行器的各模块示意框图;
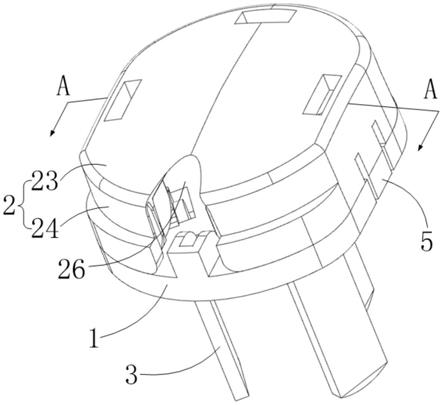
48.图3为图1所示的无人飞行器的天线和起落架的结构示意图;
49.图4为图3所示的天线的结构示意图;
50.图5为图4所示的天线的振子结构的结构示意图;
51.图6为图4所示的天线的另一个视角的结构示意图;
52.图7为图4所示的天线的振子结构、引向器以及馈电同轴线的结构示意图;
53.图8为本发明另一实施例提供的一种天线的结构示意图;
54.图9为本发明另一实施例提供的一种天线的结构示意图;
55.图10为图4所示的天线的s参数示意图;
56.图11为图4所示的天线的5.8ghz天线方向图;
57.图12为图4所示的天线的2.4ghz天线方向图。
【具体实施方式】
58.为了便于理解本发明,下面结合附图和具体实施例,对本发明进行更详细的说明。需要说明的是,当元件被表述“固定于”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。当一个元件被表述“连接”另一个元件,它可以是直接连接到另一个元件、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“垂直的”、“水平的”、“左”、“右”、“内”、“外”以及类似的表述只是为了说明的目的。
59.除非另有定义,本说明书所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本发明。本说明书所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
60.此外,下面所描述的本发明不同实施例中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
61.本发明实施例提供的天线可应用于无人飞行器中,本发明实施例中的无人飞行器可以应用于军用以及民用场景中,民用场景例如包括航拍、快递运输、灾难救援、观察野生动物、测绘、新闻报道、电力巡检等应用场景中。
62.其中,无人飞行器可包括固定翼无人飞行器和旋转翼无人飞行器,例如直升机、四旋翼机和具有其他数量的旋翼和/或旋翼配置的飞行器。无人飞行器可以用于跟踪目标,在无人飞行器跟踪目标的过程中,有可能会遇到障碍物。无人飞行器需跟踪目标的同时躲避障碍物,以实现正常飞行。其中,目标可以为任何合适的可移动或不可移动物体,包括交通工具、人、动物、建筑物、山川河流等。障碍物例如建筑物、山体、树木、森林、信号塔或其他可移动或不可移动物体。为便于说明,本发明实施例中以天线安装于四翼无人飞行器为例,应当理解的是,以下所述仅是示例性的,并非因此限制本发明的专利范围。
63.请一并参阅图1至图3,为本发明实施例提供的一种无人飞行器100,包括机体10、动力组件20、控制装置30以及天线40,动力组件20、控制装置30以及天线40分别安装于机体10。
64.机体10包括机身11和机臂12,机臂12连接机身11。机臂12的数量为四个,其中两个机臂12设于机身11的一侧,另外两个机臂12设于机身11的另一侧。每个机臂12背离机身11的一端分别设置有动力组件20,动力组件20用于带动机体11飞行。可以理解的是,在一些其他实施例中,机臂12的数量可以根据实际需求设置,比如设置为一个、两个、六个等,只需能满足无人飞行器100的使用需求即可。
65.动力组件20包括电机21和螺旋桨22,电机21分别连接机臂12和螺旋桨22。电机21定子固定连接于机臂12背离机身11的一端,螺旋桨22连接于电机21转子,电机21可驱动螺旋桨22相对于机臂12转动,为无人飞行器100提供飞行动力。
66.动力组件20还包括电池23,电池23设于机身11的后部。机身11内设有第一安装空间(图未示),电池23安装于第一安装空间内。电池23与电机21电连接,电池23为电机21提供电能。其中,机身11的后部为其背离无人飞行器100行进方向的一端。
67.机身11内还设有第二安装空间(图未示),控制装置30安装于第二安装空间内。控制装置30分别电连接电机21、电池23以及天线40,控制装置30用于控制动力组件20的电池23和电机21为无人飞行器100提供飞行动力,以及通过天线40收发地面数据终端的控制信号。
68.进一步地,无人飞行器100还包括起落架50,起落架50设于机臂12背离机身11的一端,起落架50用于支撑机体10,天线40安装于起落架50内。可以理解的是,在一些其他实施例中,起落架50也可以设置于机身11,在此不予限定。
69.进一步地,无人飞行器100还包括云台60,云台60设于机身11的前部。云台60与天线40电连接,云台60通过天线40向地面数据终端传输图像数据,以便于无人飞行器100在飞行过程中实时采集图像数据。其中,机身11的前部为其朝向无人飞行器100行进方向的一端。
70.需要说明的是,本实施中的“电连接”意为:两结构之间能够实现电信号的通信,其可以是通过线缆实现的有线电连接,亦可以是通过蓝牙、wifi模块等实现的无线电连接。
71.请一并参阅图3至图5,天线40包括基板41、振子结构42、引向器43以及馈电同轴线44。振子结构42和引向器43分别设于基板41相对的两面,引向器43沿第一方向x设于振子结构42的一侧。馈电同轴线55设于基板41背离振子结构42的一面,馈电同轴线55电连接于振子结构42。
72.基板41收容于起落架50内的收容空间51内,收容空间51的两侧壁上分别设有卡槽52,基板41的两侧分别卡设于两个卡槽52内,以使得基板41与起落架50固定。可以理解的是,在一些其他实施例中,基板41也可以通过螺接、粘接等方式固定于起落架50,在此不予限定。基板41上开设有第一馈电孔(图未示)和第二馈电孔(图为示),第一馈电孔和第二馈电孔沿第二方向y间隔设置。第一馈电孔设于第二馈电孔背离机身11的一侧,第一馈电孔和第二馈电孔用于供馈电同轴线44的馈电探针插入固定。
73.为减小天线40的性能的差异和变化,基板41选用介电常数较小的材料介质,在本实施例中,基板41为由fr4材质制成。其中,fr4是一种耐燃材料等级的代号,所代表的意思是树脂材料经过燃烧状态必须能够自行熄灭的一种材料规格,它不是一种材料名称,而是一种材料等级,因此目前一般基板41所用的fr4等级材料就有非常多的种类,但是多数都是以所谓的四功能(tera
‑
function)的环氧树脂加上填充剂(filler)以及玻璃纤维所做出的复合材料。可以理解的是,在一些其他实施例中,基板41的材质也可以根据实际需求设置,比如采用塑料、泡沫等材料制成,具有特定形状的非导电结构。
74.请一并参阅图4和图5,振子结构42包括位于基板41同一面的第一微带线421、第二微带线422、第三微带线423、第四微带线424、第五微带线425、第六微带线426、第七微带线427以及第八微带线428。第一微带线421分别连接第二微带线422和第三微带线423,第三微带线424连接第四微带线424。第五微带线425分别连接第六微带线426和第七微带线427,第七微带线427连接第八微带线428。第一微带线421和第五微带线425还分别连接馈电同轴线44。
75.振子结构42包括具有第一谐振频率的第一振子401和具有第二谐振频率的第二振子402。第一振子401包括第一辐射部401a和第二辐射部401b,第一辐射部401a和第二辐射部401b沿第二方向y设于振子结构42相对的两侧。第二振子402包括第三辐射部402a和第四辐射部402b,第三辐射部402a和第四辐射部402b沿第二方向y设于振子结构42相对的两侧。其中,第一辐射部401a与第三辐射部402a连接,第二辐射部401b与第四辐射部402b连接。
76.第一辐射部401a包括第一微带线421和第二微带线422,第二辐射部401b包括第五微带线425和第六微带线426。第三辐射部402a包括第一微带线421、第三微带线423以及第四微带线424,第四辐射部402b包括第五微带线425、第七微带线427以及第八微带线428。其中,第一振子401为高频段振子,第二振子402为低频段振子,第一微带线421和第五微带线425为共用微带线。
77.第一微带线421沿第一方向x设置,第一微带线421的中部与第一馈电孔连接。
78.第二微带线422沿第二方向y设置,第二微带线422自第一微带线421的一端朝背离第二辐射部401b的方向延伸。第二微带线422的数量为两个,两个第二微带线422沿第一方向x相对设于第一微带线421的两端。其中,第二方向y与第一方向x垂直。
79.第三微带线423沿第二方向y设置,第三微带线423自第一微带线421的中部朝背离第二辐射部201b的方向延伸。沿第二方向y,第三微带线423与第一馈电孔位于同一直线上,
两个第二微带线422相对于第三微带线423对称设置。
80.第四微带线424呈l形状,第四微带线424包括依次连接的第一线部4240、第二线部4242以及第三线部4244。第四微带线424连接于第三微带线423背离第一微带线421的一端,第一线部4240和第二线部4242分别沿第一方向x设置,第一线部4240的一端和第二线部4242的一端分别连接第三微带线423,第一线部4240的另一端和第二线部4242的另一端分别沿相互背离的方向延伸,即第一线部4240和第二线部4242分别设于第三微带线423相对的两侧。第三线部4244沿第二方向y设置,第三线部4244自第二线部4242背离第一线部4240的一端朝向第一微带线421的方向延伸。其中,第一线部4240的长度小于第二线部4242的长度。
81.可以理解的是,在一些其他实施例中,第四微带线424的形状可以根据实际需求设置,比如设置为i形、匚形等,在此不予限定。当第四微带线424设置为i形时,第三线部4243可以省略,仅设置第一线部4240和第二线部4242即可。
82.第五微带线425沿第一方向x设置,第五微带线425的中部与第二馈电孔连接。
83.第六微带线426沿第二方向y设置,第六微带线426自第五微带线425的一端朝向背离第一辐射部201a的方向延伸。第六微带线426的数量为两个,两个微带线426沿第一方向x相对设于第五微带线425的两端。其中,沿第二方向y,其中一个第六微带线426与其中第二微带线422位于同一直线上,另一个第六微带线426与另一个第二微带线422位于同一直线上。
84.第七微带线427沿第二方向y设置,第七微带线427自第五微带线425的中部朝向背离第一辐射部201a的方向延伸。沿第二方向y,第七微带线427与第二馈电孔位于同一直线上,两个第六微带线426相对于第七微带线427对称设置。
85.第八微带线428连接于第七微带线427背离第五微带线425的一端,第八微带线428包括相连接的第四线部4280和第五线部4282。第四线部4280和第五线部4282分别沿第一方向x设置,第四线部4280的一端和第五线部4282的一端分别连接第七微带线427,第四线部4280的另一端和第五线部4282的另一端分别沿相互背离的方向延伸,即第四线部4280和第五线部4282分别设于第七微带线427相对的两侧。其中,第四线部4280的长度小于第五线部4282的长度。
86.为了避免第一振子401和第二振子402之间的信号发生相互干扰,每个第二微带线422和第三微带线423之间的距离大于两者之间的信号干扰距离,每个第六微带线426和第七微带线427之间的距离大于两者之间的信号干扰距离。其中,第二微带线422与第三微带线423之间的距离为两者沿第一方向x的距离,第六微带线426和第七微带线427之间的距离为两者沿第一方向x的距离。
87.为了保证第一振子401具有良好地天线增益,第二微带线422的振子单元长度是第一谐振频率电信号波长的1/8~3/4,第六微带线426的振子单元长度是第二谐振频率电信号波长的1/8~3/4。
88.为了保证第二振子402具有良好地天线增益,第三微带线423和第四微带线424的振子单元长度和是第二谐振频率电信号波长的1/8~3/4,第七微带线427和第八微带线428的振子单元长度和是第二谐振频率电信号波长的1/8~3/4。
89.请一并参阅图6和图7,引向器43设于基板41背离振子结构42的一面。沿第一方向
x,引向器43设于其中一个第二微带线422背离另一个微带线422的一侧,且引向器43位于第三微带线423朝向第三线部4243的一侧。引向器43沿第二方向y设置,引向器43自第二微带线422处延伸至第七微带线427处。引向器43用于改善第一谐振频率信号的方向性,使第一谐振频率的辐射方向朝工作方向偏移,进而调整工作方向的谐振频率信号。
90.为了调整第一谐振频率的辐射方向图,同时又不对第二谐振频率的辐射方向图产生影响,引向器43的尺寸有一定的限制。引向器43的具体尺寸长度需要参照第一振子401的长度进行调整,其中,引向器43的长度大于第一谐振频率信号波长的1/4,引向器43的长度小于第二谐振频率信号波长的1/2。可以理解的是,在一些其他实施例中,引向器43也可以采用两段微带线组成,该两段微带线的总长度与同一段引向器的长度相当即可。
91.馈电同轴线44设于基板41背离振子结构42的一侧,馈电同轴线44沿第二方向y设置,馈电同轴线44自第一馈电孔朝第二馈电孔的方向延伸。馈电同轴线44包括同轴设置的内导体(图未示)、外导体(图未示)以及屏蔽层(图未示)。馈电同轴线44的内导体通过馈电探针连接于第一馈电孔,以使内导体与第一微带线421电连接。馈电同轴线44的外导体通过馈电探针连接于第二馈电孔,以使外导体与第五微带线425电连接。馈电同轴线44的屏蔽层通过馈电探针与第一振子401的接地端电连接。
92.请一并参阅图7和图8,在一些实施例中,天线40还包括第一连接微带线450,第一连接微带线450设于基板41背离振子结构42的一面。第一连接微带线450通过第一馈电孔与第一微带线421电连接,馈电同轴线44的内导体通过馈电探针与第一连接微带线450连接,以使得内导体与第一微带线421电连接。
93.在一些实施例中,天线40还包括第二连接微带线452,第二连接微带线452设于基板41背离振子结构42的一面。第二连接微带线452通过第二馈电孔与第五微带线425电连接,馈电同轴线44的外导体通过馈电探针与第二连接微带线452连接,以使得外导体与第五微带线425电连接。
94.在一些实施例中,天线还设有二次接地点,以有效的改善方向图。二次接地点设于基板41朝向机身11的一端,即二次接地点设于第四辐射部402b背离第三辐射部402a的一侧。二次接地点包括第一接电微带线460和第二接电微带线462,第一接电微带线460设于基板41设有振子结构42的一面,第二接电微带线462设于基板41相对的另一面。基板41上设有第三馈电孔(图未示),第一接电微带线460和第二接电微带线462之间通过第三馈电孔电连接,馈电同轴线44通过馈电探针与第二接电微带线462连接,以使得馈电同轴线44与二次接地点连接。
95.请参阅图9,在一些实施例中,基板41上设有两个第一通槽410和两个第二通槽412,两个第一通槽410和两个第二通槽412分别贯通基板41。两个第一通槽410和两个第二通槽412分别沿第二方向y设置,其中第一通槽412设于其中一个第二微带线422和第三微带线423之间,另一个第一通槽412设于另一个第二微带线422和第三微带线423之间,其中一个第二通槽412设于其中一个第六微带线426和第七微带线427之间,另一个第二通槽412设于另一个第六微带线426和第七微带线427之间。第一通槽410和第二通槽412可以增加第一振子401和第二振子402之间的信号干扰距离,以对第一振子401和第二振子402之间的信号干扰有一定的调节。可以理解的是,在一些其他实施例中,第一通槽和第二通槽的数量分别可以根据实际需求设置,比如设置为一个、三个四个均可,在此不与限定。
96.请参阅图10,图10为本发明实施例提供天线40在高频段以及低频段的s参数示意图。天线40可以工作在第一谐振频段5.17ghz~6ghz(高频段)和第二谐振频段2.33ghz~2.58ghz(低频段),可以实现对第一谐振频率为5.8ghz以及第二谐振频率为2.4ghz两个频段的覆盖。可以理解的是,本发明实施例中的第一振子401和第二振子402还可以工作在其他两个不同的频段。
97.请一并参阅图11和图12,图11为本发明实施例提供的天线40在高频段的天线方向图,图12为本发明实施例提供的天线40在低频段的天线方向图。如图所示,本发明实施例提供的天线40在高频段具有定向性,在低频段具有良好的全向性。
98.在本发明实施例中,通过调整第一振子401与第二振子402在基板41上的布局方式以实现天线40的最佳阻抗匹配,仿真结果说明该天线40在第一谐振频率f1=5.8ghz处的h面方向图可实现定向覆盖,该天线40在第二谐振频率f2=2.4ghz处的h面方向图基本上可实现全方向覆盖,在保证任务信息传输质量的同时也能够收容于起落架111,满足内置的空间尺寸要求,有利于无人飞行器100的小型化设计。
99.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;在本发明的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上所述的本发明的不同方面的许多其它变化,为了简明,它们没有在细节中提供;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。