1.本发明涉及基片处理装置和基片处理方法。
背景技术:
2.在专利文献1中,公开了测量形成在基片上的膜的膜厚的膜厚测量装置。该膜厚测量装置具有:拍摄基片表面的拍摄装置;和基于作为膜厚测量对象的基片的拍摄图像的像素值来计算形成在基片上的膜的膜厚的膜厚计算部。在具有该膜厚测量装置的基片处理系统(基片处理装置)中,通过基于拍摄图像的膜厚测量来进行基片的检查。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2015
‑
215193号公报
技术实现要素:
6.发明要解决的问题
7.本发明提供有助于兼顾处理结果的可靠性提高和生产率的基片处理装置和基片处理方法。
8.用于解决问题的技术手段
9.本发明的一方面的基片处理装置包括:对基片实施规定的处理的处理单元;输送单元,其具有保持基片的保持部,通过使保持着基片的保持部位移来对处理单元进行基片的送入送出;和基片检查单元,其在处理单元的外部,获取表示保持部所保持的基片的表面状态的信息。
10.发明效果
11.依照本发明,能够提供有助于兼顾处理结果的可靠性提高和生产率的基片处理装置和基片处理方法。
附图说明
12.图1是表示基片处理系统的一例的示意性的立体图。
13.图2是表示涂敷显影装置的一例的示意图。
14.图3是示意性地表示处理模块的一例的平面图。
15.图4是示意性地表示输送单元的一例的侧面图。
16.图5是表示控制装置的功能构成的一例的框图。
17.图6是表示控制装置的硬件结构的一例的框图。
18.图7是表示涂敷显影处理的一例的流程图。
19.图8是表示向处理单元送入时的检查处理的一例的流程图。
20.图9是表示从处理单元送出时的检查处理的一例的流程图。
21.图10是示意性地表示输送单元的一例的侧面图。
22.图11是表示向处理单元送入时的检查处理的一例的流程图。
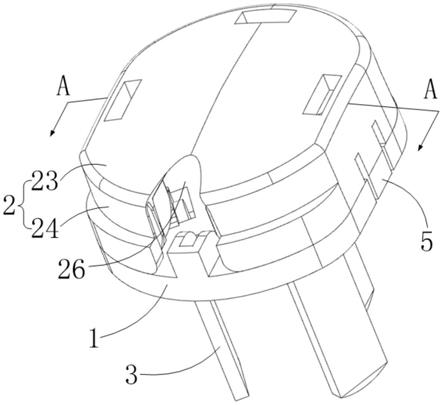
23.图12的(a)是示意性地表示输送单元的一例的平面图。图12的(b)是示意性地表示输送单元的一例的侧面图。
24.附图标记说明
[0025]2……
涂敷显影装置,u1
……
液处理单元,a3
……
输送装置,20
……
保持臂,30
……
第1驱动单元,50
……
第2驱动单元,70、70a
……
基片检查单元,72、72a
……
传感器,80
……
环境检查单元,90
……
多关节臂,100
……
控制装置,102
……
位移控制部,106、108
……
检查控制部。
具体实施方式
[0026]
下面,参照附图,对一个实施方式进行说明。在说明中,对相同要素或者具有相同功能的要素标注相同的附图标记,而省略重复的说明。
[0027]
[基片处理系统]
[0028]
图1所示的基片处理系统1是对工件w实施感光性覆膜的形成、该感光性覆膜的曝光和该感光性覆膜的显影的系统。作为处理对象的工件w例如是基片,或者通过被实施规定的处理而形成了膜或电路等的状态的基片。工件w中包含的基片,作为一例是含硅的晶片。工件w(基片)可以形成为圆形。作为处理对象的工件w可以是玻璃基片、掩模基片、fpd(flat panel display:平板显示器)等,也可以是对这些基片等实施规定的处理而得到的中间体。感光性覆膜例如是抗蚀膜。
[0029]
基片处理系统1包括涂敷显影装置2和曝光装置3。曝光装置3是对形成于工件w(基片)的抗蚀膜(感光性覆膜)进行曝光的装置。具体而言,曝光装置3通过液浸曝光等的方法对抗蚀膜的曝光对象部分照射能量线。涂敷显影装置2在由曝光装置3进行的曝光处理前,进行在工件w的表面涂敷抗蚀剂(药液)而形成抗蚀膜的处理,在曝光处理后进行抗蚀膜的显影处理。
[0030]
(基片处理装置)
[0031]
下面,作为基片处理装置的一例,对涂敷显影装置2的结构进行说明。如图1和图2所示,涂敷显影装置2包括承载器区块4、处理区块5、接口区块6和控制装置100。
[0032]
承载器区块4进行工件w向涂敷显影装置2内的导入和工件w从涂敷显影装置2内的导出。例如承载器区块4能够支承工件w用的多个承载器c,内置有包括交接臂的输送装置a1。承载器c收纳例如圆形的多个工件w。输送装置a1将工件w从承载器c取出并交送到处理区块5,从处理区块5接收工件w并将其送回承载器c内。处理区块5具有处理模块11、12、13、14。
[0033]
处理模块11内置有液处理单元u1、热处理单元u2和将工件w输送到这些单元的输送装置a3。处理模块11用液处理单元u1和热处理单元u2在工件w的表面上形成下层膜。液处理单元u1将下层膜形成用的处理液涂敷在工件w上。热处理单元u2进行伴随下层膜的形成的各种热处理。处理模块11还可以具有检查单元u3(处理单元)。检查单元u3获取工件w的状态来检查该工件w的检查。检查单元u3例如用摄像机拍摄下层膜形成前的工件w的正面、背面或者周缘部,将由摄像机拍摄的拍摄图像输出到控制装置100。
[0034]
处理模块12内置有液处理单元u1、热处理单元u2和将工件w输送到这些单元的输
送装置a3。处理模块12用液处理单元u1和热处理单元u2在下层膜上形成抗蚀膜。液处理单元u1将抗蚀膜形成用的处理液(抗蚀剂)涂敷在下层膜上。热处理单元u2进行伴随抗蚀膜的形成的各种热处理。
[0035]
处理模块13内置有液处理单元u1,热处理单元u2和将工件w输送到这些单元的输送装置a3。处理模块13用液处理单元u1和热处理单元u2在抗蚀膜上形成上层膜。液处理单元u1将上层膜形成用的处理液涂敷在抗蚀膜上。热处理单元u2进行伴随上层膜的形成的各种热处理。
[0036]
处理模块14内置有液处理单元u1,热处理单元u2和将工件w输送到这些单元的输送装置a3。处理模块14用液处理单元u1和热处理单元u2进行实施了曝光处理的抗蚀膜的显影处理和伴随显影处理的热处理。液处理单元u1在已曝光的工件w的表面上涂敷了显影液之后,用冲洗液对其进行冲洗,由此进行抗蚀膜的显影处理。热处理单元u2进行伴随显影处理的各种热处理。作为热处理的具体例子,能够列举出显影处理前的加热处理(peb:post exposure bake(曝光后烘烤))、显影处理后的加热处理(pb:post bake(后烘烤))等。处理模块14还可以具有检查单元u3。检查单元u3例如用摄像机拍摄显影处理后(pb后)的工件w的正面、背面或者周缘部,将摄像机的拍摄图像输出到控制装置100。
[0037]
在处理区块5内的承载器区块4侧设置有搁架单元u10。搁架单元u10被划分为在上下方上排列的多个小室。在搁架单元u10的附近设置有包含升降臂的输送装置a7。输送装置a7使工件w在搁架单元u10的小室彼此之间升降。
[0038]
在处理区块5内的接口区块6侧设置有搁架单元u11。搁架单元u11被划分为在上下方上排列的多个小室。因为搁架单元u10、u11使该工件w待机以对工件w进行下一个处理(作为缓冲器发挥功能),因此这些搁架单元u10、u11也相当于对工件w实施处理的处理单元。
[0039]
接口区块6在其与曝光装置3之间进行工件w的交接。例如接口区块6内置有包括交接臂的输送装置a8,与曝光装置3连接。输送装置a8将配置于搁架单元u11的工件w交送到曝光装置3。输送装置a8从曝光装置3接收工件w并将其送回搁架单元u11。
[0040]
(输送装置)
[0041]
下面,参照图3和图4,对处理模块12中的输送装置a3的一例详细地进行说明。输送装置a3(输送单元)在处理模块12内在保持着工件w的状态下输送该工件w。输送装置a3在多个处理单元的外部输送工件w,从而在处理模块12中包含的多个处理单元之间输送工件w。处理单元的外部,是处理模块12中的多个处理单元的内部空间(例如,处理单元的壳体所包围的空间)以外的区域。在图3所例示的处理模块12中,多个液处理单元u1沿水平的一方向并排地配置。在下文中,将多个液处理单元u1并排的方向设为“方向d1”,将与方向d1垂直的方向设为“方向d2”进行说明。输送装置a3构成为能够使工件w至少沿方向d1、d2移动。
[0042]
输送装置a3具有保持臂20(保持部)。保持臂20构成为能够保持工件w。保持臂20以工件w的一个主面wa朝向上方的方式进行保持。主面wa是在液处理单元u1中形成抗蚀剂的涂敷膜的面。保持臂20也可以形成为包围工件w的周缘,支承与工件w的主面wa相反的一侧的主面wb(背面)的周缘部。输送装置a3通过使保持着工件w的保持臂20位移来对液处理单元u1进行工件w的送入送出。即,输送装置a3通过使保持臂20位移来向一液处理单元u1送入工件w,通过使保持臂20位移来从该液处理单元u1送出工件w。输送装置a3也可以对多个液处理单元u1分别进行多个工件w的送入送出。
[0043]
输送装置a3例如还包括第1驱动单元30(第1驱动单元)和第2驱动单元50(第2驱动单元)。第1驱动单元30构成为能够使保持臂20至少沿方向d2(第1方向)移动。第1驱动单元30例如如图4所示包括驱动部32、旋转驱动部46和基台48。
[0044]
驱动部32是构成为能够用电动机等动力源使保持臂20沿水平的一方向往复移动的致动器。驱动部32使保持臂20至少沿方向d2移动(往复移动)。用驱动部32使保持臂20在方向d2上位移,而保持臂20所保持的工件w沿方向d2移动。
[0045]
驱动部32例如如图4所示,包含壳体34、滑动部件36、滑轮38a、38b、传送带42和电动机44。壳体34收纳驱动部32中包含的各要素。在壳体34的上壁设置有开口34a。滑动部件36被设置成相对于壳体34可移动。滑动部件36例如以沿铅垂方向延伸的方式形成。滑动部件36的下端部在壳体34内连接于传送带42。滑动部件36的上端部通过开口34a突出到壳体34外,在滑动部件36的上端部连接有保持臂20的根端部。滑轮38a、38b分别配置于方向d2上的壳体34内的各端部。滑轮38a、38b分别以能够绕沿着方向d1的旋转轴旋转的方式设置于壳体34内。
[0046]
传送带42架设于滑轮38a、38b。传送带42例如是同步传送带。电动机44是产生转矩的动力源。电动机44例如是伺服电动机。当由电动机44产生的扭矩(驱动力)被传递到滑轮38a时,架设于滑轮38a、38b的传送带42沿方向d2移动。由此,滑动部件36也在方向d2上移动(保持臂20在方向d2上位移)。
[0047]
旋转驱动部46例如是构成为能够用电动机等动力源而使驱动部32绕铅垂的旋转轴旋转的旋转致动器。旋转驱动部46支承驱动部32。通过用旋转驱动部46使驱动部32旋转,而驱动部32所驱动的保持臂20的移动方向(相对于方向d2的角度)发生变化。基台48是支承旋转驱动部46和驱动部32的部件。旋转驱动部46设置于基台48上,基台48例如以沿方向d2延伸的方式形成。基台48的方向d2上的一端连接于第2驱动单元50。
[0048]
以上说明的第1驱动单元30(驱动部32)使保持臂20移动,以使得保持臂20相对于壳体34的相对位置发生变化。驱动部32例如使保持臂20在方向d2上保持臂20的前端部和基台48重叠的位置、与在基台48的外侧保持臂20的前端部和基台48不重叠的位置之间移动。
[0049]
返回图3,第2驱动单元50包含构成为能够用电动机等动力源而使第1驱动单元30在水平的一方向上往复移动的致动器。第2驱动单元50例如如图3所示,使第1驱动单元30沿方向d1(第2方向)移动。由此,设置于第1驱动单元30的保持臂20在方向d1上位移,保持臂20所保持的工件w在方向d1上移动。
[0050]
第2驱动单元50例如包括壳体52、滑动部件54、导轨56、滑轮58a、58b、传送带62和电动机64。壳体52收纳第2驱动单元50中包含的各要素。在壳体52中的与多个液处理单元u1相对的壁设置有开口52a。
[0051]
滑动部件54是被设置成相对于壳体52可移动,并支承第1驱动单元30(基台48)的部件。滑动部件54例如以沿方向d2延伸的方式形成。滑动部件54的根端部在壳体52内连接于导轨56和传送带62。滑动部件54的前端部通过开口52a而突出到壳体52外。在滑动部件54的前端部连接有第1驱动单元30的基台48的一端部。导轨56以沿方向d1(壳体52的宽度方向)直线状地延伸的方式设置于壳体52内。
[0052]
滑轮58a、58b分别配置于方向d1上的壳体52的各端部。滑轮58a、58b分别以能够绕沿着方向d2的旋转轴旋转的方式设置于壳体52内。传送带62架设于滑轮58a、58b。传送带62
例如是同步传送带。电动机64是产生转矩的动力源。电动机64例如是伺服电动机。电动机64连接于滑轮58a。当由电动机64产生的扭矩(驱动力)被传递到滑轮58a时,架设于滑轮58a、58b的传送带62沿方向d1移动。由此,滑动部件54(第1驱动单元30)也沿方向d1往复移动。通过滑动部件54(第1驱动单元30)沿方向d1移动,第1驱动单元30也沿方向d1移动。
[0053]
此处,说明伴随对多个液处理单元u1中的一液处理单元u1进行工件w的送入送出而执行的输送装置a3的输送动作。当从搁架单元u10接收液处理单元u1中的处理对象的工件w时,输送装置a3用旋转驱动部46以驱动部32的壳体34(传送带42)延伸的方向沿方向d2的方式使驱动部32旋转。接着,输送装置a3用第2驱动单元50,使保持臂20移动至保持臂20(工件w)与液处理单元u1在方向d2上相对的位置(在方向d2上并排的位置)。以下,将前端部位于与基台48重叠的位置的状态的保持臂20与作为输送目标的液处理单元u1在方向d2上相对时的保持臂20(工件w)的位置,称为“相对位置”。
[0054]
然后,输送装置a3用第1驱动单元30的驱动部32使保持臂20沿方向d2移动,以将工件w从相对位置输送至液处理单元u1内。例如驱动部32使保持臂20沿方向d2从保持臂20的前端部与基台48重叠位置移动至该前端部与基台48不重叠的位置。输送装置a3在向液处理单元u1交接了工件w后,用驱动部32,使没有保持工件w的保持臂20沿方向d2移动至相对位置。
[0055]
输送装置a3用驱动部32,使没有保持工件w的保持臂20从相对位置移动到液处理单元u1内,以接收液处理单元u1中的处理后的工件w。输送装置a3在从液处理单元u1接受了工件w后,用驱动部32使保持臂20从液处理单元u1内移动至相对位置。例如,驱动部32使保持臂20沿方向d2从保持臂20的前端部与基台48不重叠的位置移动至该前端部与基台48重叠的位置。然后,输送装置a3通过用旋转驱动部46使驱动部32旋转,或者用第2驱动单元50使第1驱动单元30在方向d2上移动,将工件w从相对位置向下一处理(例如,热处理单元u2中的热处理)输送。
[0056]
(基片检查单元)
[0057]
处理模块12如图3所示还包括基片检查单元70。基片检查单元70在由处理模块11的检查单元u3进行的检查与由处理模块14的检查单元u3进行的检查之间,用于涂敷显影处理的中途阶段的工件w的检查。基片检查单元70在液处理单元u1等的处理单元的外部,获取表示保持臂20所保持的工件w的表面状态的信息(以下,称为“表面信息”。)。基片检查单元70也可以获取拍摄该工件w而得到的图像信息作为工件w的表面信息。
[0058]
作为基片检查单元70的检查对象的上述表面状态,可以为工件w的外表面上的任意区域的状态。例如,表面状态可以是工件w的主面wa的至少一部分的状态,也可以是工件w的与主面wa相反一侧的主面wb的至少一部分的状态,还可以是连接工件w的主面wa、wb的侧面wc的至少一部分的状态。表面状态也可以是包含工件w的主面wa、wb和侧面wc中的2者以上的区域的至少一部分的状态。作为一例,基片检查单元70获取表示主面wa全部区域的状态的表面信息。
[0059]
基片检查单元70也可以设置于输送装置a3。基片检查单元70例如设置于输送装置a3的第1驱动单元30。基片检查单元70也可以具有能够拍摄工件w的表面的传感器72(摄像机)。传感器72也可以设置于输送装置a3。作为一例,传感器72经由固定部件74固定(连接)于驱动部32的壳体34。通过将传感器72固定于壳体34,伴随由输送装置a3的第2驱动单元50
进行的保持臂20的移动,传感器72也沿方向d1移动。另一方面,即使用输送装置a3的第1驱动单元30(驱动部32)使保持臂20移动,传感器72也不移动。即,伴随由驱动部32进行的保持臂20的移动,保持臂20(保持臂20所保持的工件w)相对于传感器72的相对位置发生变化。
[0060]
在保持臂20的前端部配置于与基台48重叠的位置的状态下,传感器72被设置成位于工件w(保持臂20)与液处理单元u1之间。传感器72也可以配置在比保持臂20所保持的工件w靠上的位置。传感器72例如具有能够拍摄位于自身的下方的区域的视野。以下,将传感器72能够拍摄的区域称为“获取区域ar”。即,获取区域ar是能够由基片检查单元70获取表面信息的区域。
[0061]
传感器72也可以是将像素一维排列而成的拍摄元件,从线状的获取区域ar获取信息(图像信息)的线传感器(线传感器式的摄像机)。传感器72的获取区域ar可以沿方向d1延伸(拍摄元件可以在方向d1并排排列)。作为一例获取区域ar的方向d1上的尺寸与工件w为相同程度,不过也可以比工件w大。在该情况下,在用输送装置a3的第1驱动单元30(驱动部32)使保持臂20在方向d2上移动时,以工件w的主面wa的全部区域通过获取区域ar的方式配置传感器72。基片检查单元70还可以具有能够对获取区域ar照射光的光源(配置为线状的多个光源)。
[0062]
(环境检查单元)
[0063]
处理模块12还可以包括获取表示液处理单元u1等的处理单元内的状态的信息(以下,称为“环境信息”。)的环境检查单元80。环境检查单元80例如具有获取上述环境信息的传感器82。在传感器82获取的环境信息中,包含对处理单元中的工件w的处理结果造成影响的信息。例如,由传感器82检测的环境信息中,包含处理单元内的红外线(红外线的辐射能量)、温度、湿度、气压、单元内的部件的角度(姿态)、振动或者单元内的热板的温度等。传感器82也可以是将机械要素零件、传感器元件和电子电路等集成而得的mems(micro electro mechanical system:微机电系统)传感器。以在保持臂20配置于处理单元内的状态下传感器82也位于处理单元内的方式,将传感器82设置在保持臂20。作为一例,传感器82如图3所示,设置在保持臂20的前端附近。
[0064]
(控制装置)
[0065]
下面,参照图5和图6,对控制装置100的一例详细地进行说明。控制装置100控制涂敷显影装置2。控制装置100构成为至少能够执行:控制输送装置a3,以使得在使保持臂20保持着工件w的状态下使该保持臂20位移,对液处理单元u1进行工件w的送入送出的处理;和控制基片检查单元70,以使得在液处理单元u1的外部,获取保持臂20所保持的工件w的表面信息的处理。控制装置100作为功能上的构成(以下,称为“功能模块”。),具有例如位移控制部102、检查控制部106、108和处理控制部112。
[0066]
位移控制部102用输送装置a3使保持臂20位移。例如位移控制部102用输送装置a3使保持臂20位移,以使得基片检查单元70的表面信息的获取区域ar通过工件w的主面wa。具体而言,位移控制部102控制第2驱动单元50以使得保持臂20移动到液处理单元u1与保持臂20在方向d2上相对的相对位置。
[0067]
位移控制部102控制第1驱动单元30(驱动部32)以使得保持臂20从相对位置移动到液处理单元u1。由此,在工件w通过了获取区域ar之后,保持臂20所保持的工件w被送入液处理单元u1。位移控制部102控制第1驱动单元30(驱动部32)以使得保持臂20从液处理单元
u1移动到相对位置。由此,在工件w通过了获取区域ar之后,保持臂20所保持的工件w从液处理单元u1被送出。
[0068]
在图3和图4例示的处理模块12中,在对液处理单元u1送入时和送出时的任意情况下,在工件w通过获取区域ar时,保持臂20沿与获取区域ar交叉的方向位移。位移控制部102也可以在向液处理单元u1的工件w的送入结束后,从该液处理单元u1的工件w的送出开始前,使保持臂20位移以将其他工件w送入其他液处理单元u1。
[0069]
检查控制部106(基片检查控制部)使基片检查单元70获取通过获取区域ar的工件w的表面信息。例如,检查控制部106在进行向液处理单元u1的工件w的送入时,使传感器72获取通过获取区域ar的工件w的主面wa的表面信息。检查控制部106在进行从液处理单元u1的工件w的送出时,使传感器72获取通过获取区域ar的工件w的主面wa的表面信息。由此,检查控制部106从传感器72获取液处理单元u1中的处理前的工件w的表面信息和液处理单元u1中的处理后的工件w的表面信息。
[0070]
作为一例,检查控制部106以用传感器72扫描通过获取区域ar的工件w的主面wa的方式,获取工件w的主面wa的表面信息。具体而言,检查控制部106在工件w的主面wa通过获取区域ar的期间(不使工件w停止),使传感器72获取分别表示主面wa中的多个区域的表面状态的多个表面信息。通过将这多个表面信息整合,能够得到主面wa的表面信息。
[0071]
检查控制部108(环境检查控制部)使环境检查单元80获取液处理单元u1等的处理单元内的环境信息。检查控制部108例如在保持臂20位于多个液处理单元u1中的一液处理单元u1(第1处理单元)内的状态下,使传感器82获取该一液处理单元u1内的环境信息。检查控制部108在保持臂20位于液处理单元u1中的另一液处理单元u1(第2处理单元)内的状态下,使传感器82获取该另一液处理单元u1内的环境信息。检查控制部108在将工件w送入任一液处理单元u1时,从该液处理单元u1送出工件w时的至少一个时候,使传感器82获取该液处理单元u1内的环境信息。
[0072]
处理控制部112控制液处理单元u1等的处理单元,以对工件w实施规定的处理。例如,处理控制部112控制液处理单元u1,以使得在送入工件w后在该工件w的主面wa形成抗蚀剂的涂敷膜。处理控制部112基于检查控制部106获取到的处理前的工件w的表面信息和检查控制部108获取到的液处理单元u1内的环境信息中的至少一个信息,控制液处理单元u1。作为一例,处理控制部112也可以根据检查控制部108获取到的环境信息,设定液处理单元u1中的处理条件(例如,抗蚀剂涂敷时的工件w的转速等)。
[0073]
控制装置100由一个或多个控制用计算机构成。例如控制装置100具有图6所示的电路120。电路120具有一个或多个处理器122、内存124、存储器126、输入输出端口128和计时器132。存储器126例如具有硬盘等能够由计算机读取的存储介质。存储介质存储有用于使控制装置100执行后述的基片处理方法的程序。存储介质可以是非易失性的半导体内存、磁盘和光盘等可取出的介质。内存124暂时存储从存储器126的存储介质加载的程序和处理器122的运算结果。
[0074]
处理器122与内存124协同工作来执行上述程序。输入输出端口128根据来自处理器122的指令,在其与第1驱动单元30、第2驱动单元50、基片检查单元70、环境检查单元80和液处理单元u1等之间进行电信号的输入输出。计时器132例如对一定周期的标准脉冲进行计数来测量经过时间。此外,控制装置100的硬件结构可以由专用的逻辑电路或者集成了该
逻辑电路的asic(application specific integrated circuit:专用集成电路)构成。
[0075]
[基片处理方法]
[0076]
下面,参照图7,作为基片处理方法的一例,对在涂敷显影装置2中执行的涂敷显影处理进行说明。图7是表示涂敷显影处理的一例的流程图,表示了对1个工件w的涂敷显影处理的流程。首先,控制装置100控制输送装置a1以将承载器c内的工件w输送到搁架单元u10,控制输送装置a7以将该工件w配置在处理模块11用的小室。
[0077]
接着,控制装置100控制输送装置a3,以将搁架单元u10的工件w输送到处理模块11内的检查单元u3。控制装置100控制检查单元u3,以检查涂敷显影装置2中的涂敷显影处理前的工件w(步骤s01)。
[0078]
接着,控制装置100控制处理模块11以在工件w的主面wa上形成下层膜(步骤s02)。在步骤s02中,例如,控制装置100控制输送装置a3以将工件w从搁架单元u10输送到液处理单元u1。然后,控制装置100控制液处理单元u1以在工件w的主面wa上形成下层膜形成用的处理液的涂敷膜。控制装置100控制输送装置a3以将形成有涂敷膜的工件w输送到热处理单元u2。然后,控制装置100控制热处理单元u2以在工件w的主面wa上形成下层膜。之后控制装置100控制输送装置a3以将形成了下层膜后的工件w送回搁架单元u10,控制输送装置a7以将该工件w配置在处理模块12用的小室。
[0079]
接着,控制装置100控制处理模块12以在形成了下层膜后的工件w的主面wa上形成抗蚀膜(步骤s03)。在步骤s03中,例如控制装置100控制输送装置a3以将搁架单元u10的工件w输送到处理模块12内的任一液处理单元u1。然后,控制装置100(处理控制部112)控制液处理单元u1以在工件w的主面wa上形成抗蚀剂的涂敷膜。控制装置100控制输送装置a3以将形成有抗蚀剂的涂敷膜的工件w输送到热处理单元u2。然后,控制装置100控制热处理单元u2以在工件w的主面wa上形成抗蚀膜。之后,控制装置100控制输送装置a3以将形成了抗蚀膜后的工件w送回到搁架单元u10中,控制输送装置a7以将该工件w配置在处理模块13用的小室。
[0080]
接着,控制装置100控制处理模块13以在形成了抗蚀膜后的工件w的主面wa上形成上层膜(步骤s04)。在步骤s04中,例如控制装置100控制输送装置a3以将工件w输送到液处理单元u1。然后,控制装置100控制液处理单元u1以在工件w的主面wa上形成上层膜形成用的处理液的涂敷膜。控制装置100控制输送装置a3以将形成有涂敷膜的工件w输送到热处理单元u2。然后,控制装置100控制热处理单元u2以在工件w的主面wa上形成上层膜。之后,控制装置100控制输送装置a3以将形成了上层膜后的工件w输送到搁架单元u11。
[0081]
接着,控制装置100控制输送装置a8以将搁架单元u11的工件w送出到曝光装置3。之后,控制装置100控制输送装置a8以从曝光装置3接收实施了曝光处理的工件w,并将其配置在搁架单元u11中的处理模块14用的小室。
[0082]
接着,控制装置100控制处理模块14以对实施了曝光处理后的工件w实施显影处理(步骤s05)。在步骤s05中,例如,控制装置100控制输送装置a3以将工件w输送到热处理单元u2之后,控制热处理单元u2以对该工件w的抗蚀膜实施显影前的热处理。然后,控制装置100控制输送装置a3以将实施了显影前的加热处理的工件w输送到液处理单元u1后,控制液处理单元u1以对该工件w的抗蚀膜实施显影处理。
[0083]
之后,控制装置100控制输送装置a3以将实施了显影处理的工件w输送到热处理单
元u2后,控制热处理单元u2以对该工件w的抗蚀膜实施显影后的热处理。控制装置100控制输送装置a3以将显影后的实施了热处理的工件w输送到检查单元u3。
[0084]
接着,控制装置100控制检查单元u3以检查实施了包含伴随显影的热处理的显影处理后的工件w(步骤s06)。然后,控制装置100控制输送装置a3以将工件w送回到搁架单元u10,控制输送装置a7和输送装置a1以将该工件w送回到承载器c内。通过以上方式,对1个工件w的涂敷显影处理完成。
[0085]
在以上例示的涂敷显影处理中,控制装置100在由涂敷显影装置2进行的处理开始前和由涂敷显影装置2进行的全部处理后,用检查单元u3进行工件w的检查。控制装置100除了由检查单元u3进行的工件w的检查之外,也可以在步骤s02~步骤s05的各步骤的处理的中途,用基片检查单元70执行工件w的检查。图8是表示在步骤s03中,在液处理单元u1中的处理前的工件w被送入该液处理单元u1时执行的检查处理的一例的流程图。以下,对传感器72为线传感器,获取表示工件w的主面wa全部区域的状态的表面信息的情况进行例示。
[0086]
在向液处理单元u1的送入时的检查处理中,在配置于方向d2上前端部与基台48重叠的位置的保持臂20保持着工件w的状态下,首先控制装置100执行步骤s21。在步骤s21中,例如,位移控制部102控制第2驱动单元50,以使保持臂20移动至与作为送入目标的液处理单元u1的相对位置。
[0087]
接着,控制装置100执行步骤s22。在步骤s22中,例如,位移控制部102使驱动部32开始保持臂20的向方向d2的移动。由此,保持臂20所保持的工件w开始从相对位置向液处理单元u1移动。
[0088]
接着,控制装置100执行步骤s23。在步骤s23中,例如,检查控制部106待机,直至保持臂20所保持的工件w到达基片检查单元70的表面信息的获取区域ar为止。作为一例,检查控制部106也可以根据驱动部32的电动机44的旋转量或者从基于驱动部32的保持臂20的移动开始时刻起的经过时间,来判断工件w的至少一部是否到达了获取区域ar。在步骤s23中,在判断为工件w到达了获取区域ar的情况下,控制装置100执行步骤s24。在步骤s24中,例如,检查控制部106使基片检查单元70获取表面信息。作为一例,检查控制部106使传感器72拍摄工件w的主面wa中的与获取区域ar重叠的区域。
[0089]
接着,控制装置100执行步骤s25。在步骤s25中,例如,检查控制部106待机直至保持臂20所保持的工件w通过表面信息的获取区域ar为止。作为一例,检查控制部106也可以根据驱动部32的电动机44的旋转量或者从由驱动部32进行的保持臂20的移动开始时刻起的经过时间,来判断工件w(主面wa)的全部区域是否通过获取区域ar(是否移动至不与获取区域ar重叠的位置)。
[0090]
在步骤s25中,在判断为工件w没有通过获取区域ar(主面wa的至少一部分与获取区域ar重叠)的情况下,检查控制部106再次执行步骤s24。通过反复进行以上的步骤s24、s25,在工件w通过获取区域ar的期间,基片检查单元70继续获取工件w的表面信息。具体而言,在工件w的主面wa的全部区域通过获取区域ar的期间,检查控制部106通过使传感器72依次拍摄工件w的主面wa中的多个区域,来获取主面wa的全部区域的表面信息(图像信息)。
[0091]
在步骤s25中,在判断为工件w通过了获取区域ar的情况下,控制装置100执行步骤s26。在步骤s26中,例如,位移控制部102待机直至保持臂20到达液处理单元u1内为止。作为一例,位移控制部102也可以根据驱动部32的电动机44的旋转量或者从由驱动部32进行的
保持臂20的移动开始时刻起的经过时间,来判断保持臂20(工件w)是否到达了液处理单元u1内。在步骤s26中,在判断为保持臂20到达了液处理单元u1内的情况下,控制装置100执行步骤s27。在步骤s27中,例如,位移控制部102使驱动部32停止保持臂20的向方向d2的移动。由此,从相对位置去往液处理单元u1的工件w的移动结束。
[0092]
接着,控制装置100执行步骤s28、s29、s30。在步骤s28中,例如,控制装置100控制输送装置a3和液处理单元u1以将工件w从保持臂20交接到液处理单元u1。在步骤s29中,例如,在保持臂20配置于液处理单元u1的状态下,检查控制部106使环境检查单元80(传感器82)获取该液处理单元u1内的环境信息。在步骤s30中,位移控制部102控制驱动部32,以使没有保持工件w的状态的保持臂20从液处理单元u1移动到相对位置。通过以上方式,向一液处理单元u1送入工件w时的检查处理结束。
[0093]
图9是表示在进行抗蚀膜的形成处理的步骤s03中,将液处理单元u1中的处理后的工件w从该液处理单元u1送出时执行的检查处理的一例的流程图。在从液处理单元u1送出时的检查处理中,在方向d2上配置于前端部与基台48重叠的位置的保持臂20没有保持工件w的状态下,首先控制装置100执行步骤s41、s42、s43。在步骤s41中,例如位移控制部102控制第2驱动单元50以使得保持臂20移动至相对位置。在步骤s42中,例如位移控制部102控制驱动部32,以使保持臂20从相对位置移动到液处理单元u1。在步骤s43中,例如,控制装置100控制输送装置a3和液处理单元u1以使得保持臂20从液处理单元u1收取处理后的工件w。
[0094]
接着,控制装置100执行步骤s44。在步骤s44中,例如,位移控制部102使驱动部32开始收取了工件w后的保持臂20的向方向d2的移动。由此,保持臂20所保持的工件w开始从液处理单元u1向相对位置移动。
[0095]
接着,控制装置100执行步骤s45。在步骤s45中,例如,检查控制部106与上述的步骤s23同样地待机,直至保持臂20所保持的工件w到达基片检查单元70的表面信息的获取区域ar为止。在步骤s45中,在判断为工件w到达了获取区域ar的情况下,控制装置100执行步骤s46。在步骤s46中,与上述的步骤s24同样地,检查控制部106使基片检查单元70获取工件w的主面wa中的与获取区域ar重叠的区域的表面信息。
[0096]
接着,控制装置100执行步骤s47。在步骤s47中,例如检查控制部106与上述的步骤s25同样地待机,直至保持臂20所保持的工件w通过获取区域ar为止。在步骤s47中,在判断为工件w没有通过获取区域ar的情况下,控制装置100再次执行步骤s46。通过反复进行以上的步骤s46、s47,与步骤s24、s25同样地,在工件w通过获取区域ar的期间,基片检查单元70继续获取工件w的表面信息,其结果,检查控制部106获取主面wa全部区域的表面信息。
[0097]
在步骤s47中,在判断为工件w通过了获取区域ar的情况下,控制装置100执行步骤s48。在步骤s48中,例如位移控制部102待机直至保持臂20到达相对位置为止。作为一例,位移控制部102也可以根据驱动部32的电动机44的旋转量或者从由驱动部32进行的保持臂20的移动开始时刻起的经过时间,来判断保持臂20(工件w)是否到达了相对位置。在步骤s48中,在判断为保持臂20到达了相对位置的情况下,控制装置100执行步骤s49。在步骤s49中,例如,位移控制部102使驱动部32停止保持臂20的向方向d2的移动。由此,从液处理单元u1去往相对位置的工件w的移动结束。通过以上方式,从一液处理单元u1送出工件w时的检查处理结束。
[0098]
从向液处理单元u1送入工件w起,至从该液处理单元u1送出该工件w为止的期间,
控制装置100的处理控制部112控制液处理单元u1以在工件w的主面wa形成抗蚀剂的涂敷膜。在液处理单元u1中执行液处理的期间,控制装置100也可以控制输送装置a3以将其他工件w送入其他液处理单元u1。此时,控制装置100也可以执行与图8例示的检查处理流程同样的处理。在与步骤s29同样的处理中,检查控制部108也可以在保持臂20配置于其他液处理单元u1的状态下,使环境检查单元80(传感器82)获取其他液处理单元u1的环境信息。
[0099]
上述的涂敷显影处理和检查处理的流程是一例,能够适当改变。例如,也可省略上述的步骤(处理)的一部分,也可以以其他流程执行各步骤。此外,也可以将上述的步骤中的任意2个以上的步骤组合,也可以修正或者删除一部分步骤。或者,也可以除了上述的各步骤之外还执行其他步骤。例如,在上述的例子中,在判断了向获取区域ar的到达和获取区域ar的通过之后切换传感器72的拍摄状态,不过也可以伴随向方向d2的移动开始和移动结束(例如伴随步骤s22、s27的执行),而检查控制部106切换传感器72的拍摄状态。例如,检查控制部106也可以在执行了步骤s22后,至步骤s27结束为止的期间,使传感器72继续工件w的拍摄。
[0100]
[变形例1]
[0101]
以上,对本发明的实施方式进行了详细说明,不过也可以在本发明的主旨范围内对上述的实施方式添加各种变形。处理模块12除了包括具有线传感器的基片检查单元70之外,还可以包括具有面传感器的基片检查单元。例如,如图10所示,处理模块12也可以代替基片检查单元70而包括基片检查单元70a。基片检查单元70a代替传感器72而具有传感器72a。
[0102]
传感器72a是能够利用将像素二维排列而成的拍摄元件来拍摄二维区域的面传感器(面传感器式的摄像机)。传感器72a的表面信息的获取区域ar(视野)可以与工件w的主面wa的全部区域为相同程度,也可以比主面wa的全部区域大。在该情况下,传感器72a能够获取工件w的主面wa位于获取区域ar的状态下的主面wa全部区域的表面信息(图像信息)。传感器72a的获取区域ar(视野)也可以是沿方向d1延伸的二维区域。
[0103]
基片检查单元70a也可以与基片检查单元70同样地设置在输送装置a3。例如,基片检查单元70a(传感器72a)设置于第1驱动单元30。作为一例,传感器72a也可以经由固定部件(未图示)固定在驱动部32的壳体34。在该情况下,伴随基于第2驱动单元50的保持臂20的移动而传感器72a的位置(传感器72a的获取区域ar的位置)发生变化,伴随基于驱动部32的保持臂20的移动,而保持臂20(工件w)相对于传感器72a的相对位置发生变化。也可以为,在保持臂20的前端部配置于与基台48重叠的位置的状态下,以传感器72a的获取区域ar(传感器72a的拍摄范围)包含主面wa的全部区域的方式,配置传感器72a。
[0104]
图11是表示液处理单元u1中的处理前的工件w被送入该液处理单元u1时执行的检查处理的另一例的流程图。此处,例示传感器72a具有能够拍摄工件w的主面wa的全部区域的视野的情况。在该检查处理中,例如在前端部配置于与基台48重叠的位置的保持臂20保持着工件w的状态下,控制装置100与步骤s21同样地执行步骤s61。
[0105]
接着,控制装置100执行步骤s62、s63。在步骤s62中,例如,检查控制部106使基片检查单元70a获取工件w的表面信息。作为一例,检查控制部106使传感器72a获取工件w的主面wa全部区域的表面信息(图像信息)。在步骤s63中,例如,检查控制部106控制驱动部32,以使保持臂20沿方向d2从相对位置移动到液处理单元u1内。
[0106]
接着,控制装置100与步骤s28~s30同样地执行步骤s64~s66。通过以上方式向液处理单元u1送入工件w时的检查处理结束。在以上例示的检查处理中,在保持臂20的前端部配置于与基台48重叠的位置的状态下传感器72a的获取区域ar(视野)包含主面wa全部区域,因此与图8例示的检查处理不同,在向方向d2的移动中不进行基于传感器的拍摄。在图11例示的检查处理中,在保持臂20的向方向d1的移动与向方向d2的移动的切换的时刻(步骤s61与步骤s63之间的时刻),进行主面wa的表面信息的获取。
[0107]
另外,传感器72a的获取区域ar也可以位于相对位置与液处理单元u1之间。在该情况下,控制装置100也可以用驱动部32使保持臂20在向方向d2的移动的中途暂时停止后,使传感器72a获取主面wa的表面信息。控制装置100也可以在从液处理单元u1送出工件w时与送入时同样地执行检查处理。也可以为,在送出时的检查处理中,控制装置100用驱动部32使保持臂20从液处理单元u1移动至相对位置,在工件w停止于相对位置的状态下使传感器72a获取主面wa全部区域的表面信息。也可以为,检查控制部106一边用第2驱动单元50使保持臂20沿方向d1移动,或者在基于第2驱动单元50的方向d2上的移动中或者移动开始前,使传感器72a获取工件w的表面信息。
[0108]
[变形例2]
[0109]
涂敷显影装置2也可以代替使工件w沿方向d1、d2移动的输送装置a3,用多关节臂对液处理单元u1等处理单元进行工件w的送入送出。图12的(a)和图12的(b)所示的多关节臂90(输送单元)包括基部92、转动部94、第1臂96、第2臂97和保持件98(保持部)。
[0110]
基部92设置于涂敷显影装置2内的底面等。转动部94设置于基部92上,能够绕铅垂的轴线ax1旋转。第1臂96的一端部经由转动部94连接于基部92。通过转动部94绕轴线ax1转动,而第1臂96绕轴线ax1转动。在第1臂96的另一端部设置有旋转驱动部96a,第2臂97的一端部连接于旋转驱动部96a。旋转驱动部96a使第2臂97绕铅垂的轴线ax2旋转。
[0111]
在第2臂97的另一端部设置有旋转驱动部97a,保持件98的下表面连接于旋转驱动部97a。旋转驱动部97a使保持件98绕铅垂的轴线ax3旋转。保持件98在其上表面载置工件w,例如通过吸附等保持工件w。此外,多关节臂90也可以具有1个以上的其他臂,也可以将任意臂设置成能够绕与铅垂方向交叉的轴线旋转。
[0112]
也可以为,在用多关节臂90进行对处理单元的工件w的送入送出时,基片检查单元70(传感器72)不设置在多关节臂90,而固定在规定位置。在该情况下,即使用多关节臂90使保持件98(工件w)任意移动,基片检查单元70的位置也不变化。控制装置100也可以控制多关节臂90(转动部94和旋转驱动部96a、97a),以使得保持件98所保持的工件w通过固定于规定位置的传感器72的获取区域ar。例如,也可以预先规定多关节臂90的动作,以使得工件w(工件w中的表面信息的获取对象的区域)通过获取区域ar。在传感器72为线传感器的情况下,也可以为,控制装置100(位移控制部102)在工件w通过获取区域ar时,控制多关节臂90以使得保持件98沿与线传感器的获取区域ar交叉的方向位移。在用多关节臂90进行工件w的送入送出时,也可以代替基片检查单元70(传感器72),而使用固定于规定位置的基片检查单元70a(传感器72a)。
[0113]
[其他变形例]
[0114]
以上例示的输送装置a3具有1个保持臂20,但是输送装置a3还可以具有其他保持臂20和使其他保持臂20在方向d2上移动的其他的第1驱动单元30。第1驱动单元30和其他的
第1驱动单元30也可以在铅垂方向上并排地配置。在该情况下,基片检查单元70、70a还可以具有获取其他保持臂20所保持的工件w的表面信息的其他传感器72、72a。其他传感器72、72a也可以为设置在其他的第1驱动单元30。或者,也可以为基片检查单元70中包含的1个传感器72、72a获取保持臂20所保持的工件w的表面信息和其他保持臂20所保持的工件w的表面信息。控制装置100也可以控制第1驱动单元30以将保持臂20所保持的工件w送入液处理单元u1,也可以控制其他的第1驱动单元30以用其他保持臂20将工件w从液处理单元u1送出。
[0115]
以上例示的基片检查单元70、70a相对于1个保持臂20具有1个传感器72、72a,不过基片检查单元70、70a还可以具有能够获取与主面wa相反一侧的主面wb的表面信息的其他传感器72、72a。其他传感器72、72a也可以设置在第1驱动单元30。
[0116]
在以上例示的涂敷显影装置2中,在对液处理单元u1送入送出工件w时用基片检查单元70进行检查处理,不过也可以为检查控制部106在对热处理单元u2、搁架单元u10、u11或者其他处理单元送入送出工件w时用基片检查单元70执行检查处理。处理模块11、13、14的任意模块也可以与处理模块12同样地,包括基片检查单元70和环境检查单元80。
[0117]
也可以为,检查控制部106在向处理单元送入时不使基片检查单元70执行处理前的工件w的检查处理,而在该从处理单元送出时使基片检查单元70进行处理后的工件w的检查处理。也可以为,检查控制部106在从处理单元送出时不使基片检查单元70执行处理后的工件w的检查处理,而在该向处理单元送入时使基片检查单元70执行处理前的工件w的检查处理。
[0118]
基片处理系统1并不限于上述的一例,只要包括对基片实施规定的处理的处理单元、对该处理单元进行工件w的送入送出的输送单元和获取表示输送单元的保持部所保持的工件w的表面状态的信息的基片检查单元,就可以任意地构成。
[0119]
[实施方式的效果]
[0120]
如以上所说明地那样,本发明的一方面的涂敷显影装置2包括:对工件w实施规定的处理的液处理单元u1;输送装置a3,其具有保持工件w的保持臂20,通过使保持着工件w的保持臂20位移来对液处理单元u1进行工件w的送入送出;和基片检查单元70,其在液处理单元u1的外部,获取表示保持臂20所保持的工件w的表面状态的信息。
[0121]
本发明的一方面的基片处理方法包括:通过在由保持工件w的保持臂20保持着工件w的状态下使该保持臂20位移,来向对工件w实施规定的处理的液处理单元u1进行工件w的送入送出的步骤;和在液处理单元u1的外部,获取表示保持臂20所保持的工件w的表面状态的信息的步骤。
[0122]
当按在涂敷显影装置2中执行的每个处理进行工件w的检查时,涂敷显影装置2中的处理结果的可靠性提高。然而,为了按每个处理进行检查,在各处理之前和之后向检查单元输送工件w,在检查单元中进行工件w的检查时,涂敷显影装置2中的生产率降低。对此,在本发明的涂敷显影装置2和基片处理方法中,获取保持臂20所保持的工件w的表面信息,因此能够利用处理单元的外部的工件w的输送的机会,进行工件w的检查处理。即,为了在液处理单元u1中进行处理,需要液处理单元u1的外部的工件w的输送,涂敷显影装置2和上述基片处理方法有效地利用该输送的机会。因此,涂敷显影装置2和上述基片处理方法有助于兼顾处理结果的可靠性提高和生产率。
[0123]
基片检查单元70也可以设置在输送装置a3。在该情况下,基片检查单元70的工件w的表面信息的获取区域ar,伴随输送装置a3的移动而移动。因此,能够在靠近液处理单元u1的位置进行工件w的检查。
[0124]
输送装置a3还可以包括使保持臂20沿方向d1移动的第1驱动单元30和使第1驱动单元30沿方向d2移动的第2驱动单元50。基片检查单元70也可以设置在第1驱动单元30。在该情况下,伴随基于第2驱动单元50的移动而获取区域ar也移动,因此能够在更可靠地靠近液处理单元u1的位置进行工件w的检查。
[0125]
涂敷显影装置2还可以包括:位移控制部102,其用输送装置a3使保持臂20位移,以使得工件w的主面wa通过由基片检查单元70获取表面信息的获取区域ar;和检查控制部106,其在对液处理单元u1进行工件w的送入和送出时,分别使基片检查单元70获取表示工件w的表面状态的表面信息。在该情况下,在液处理单元u1中的处理之前和之后能够检查表面状态,因此可靠性进一步提高。为了在液处理单元u1中进行处理,需要用于向液处理单元u1送入的输送和用于从液处理单元u1送出的输送。依照该构成,利用这2次输送动作进行检查处理,因此能够更有助于兼顾处理结果的可靠性提高和生产率。
[0126]
涂敷显影装置2还可以包括:位移控制部102,其用输送装置a3使保持臂20位移,以使得工件w的主面wa通过由基片检查单元70获取表面信息的获取区域ar;和检查控制部106,其在工件w的主面wa通过获取区域ar的期间,使基片检查单元70获取分别表示工件w的主面wa的多个区域的表面状态的多个信息。在该情况下,能够获取比基片检查单元70的获取区域ar大的区域的表面信息,能够使基片检查单元70简化。此外,伴随对液处理单元u1的送入送出,工件w相对于基片检查单元70移动,因此不需要仅为了用基片检查单元70获取多个区域的表面信息而使工件w移动。即,无需使基片检查单元70的其他装置复杂,就能够实现基片检查单元70的简化。
[0127]
基片检查单元70也可以具有从线状的获取区域ar获取表面信息的线传感器。位移控制部102也可以使保持臂20沿与由线传感器获取表面信息的获取区域ar交叉的方向位移。线传感器具有一维排列的拍摄元件,因此与具有二维排列的拍摄元件的面传感器相比,能够使基片检查单元70简化。或者与面传感器相比能够提高画质,因此能够获取具有更详细的信息的表面信息。
[0128]
基片检查单元70也可以具有从平面状地扩展的获取区域ar获取表面信息的面传感器。在该情况下,与线传感器相比,能够缩短用于获取表面信息的时间。
[0129]
涂敷显影装置2还可以包括环境检查单元80,其设置在保持臂20,获取液处理单元u1内的环境信息。在该情况下,能够在液处理单元u1内减少用于获取环境信息的传感器,能够使液处理单元u1简化。
[0130]
涂敷显影装置2还可以包括:对工件w实施规定的处理的其他液处理单元u1;和使环境检查单元80获取环境信息的检查控制部108。输送装置a3还可以对其他液处理单元u1进行其他工件w的送入送出。检查控制部108也可以在保持臂20位于液处理单元u1内的状态下使环境检查单元80获取液处理单元u1内的环境信息,在保持臂20位于其他液处理单元u1内的状态下使环境检查单元80获取其他液处理单元u1内的环境信息。在该情况下,能够用相同的传感器82获取液处理单元u1和其他液处理单元u1的环境信息。因此,与用液处理单元u1和其他液处理单元u1中单独地具有的传感器进行测量的情况相比,能够减少传感器的
测量值的装置间误差。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。