1.本公开内容的实施方式涉及用于垂直有机发光二极管(organic light emitting diode;oled)蒸发的掩模框架集成、在真空系统中的真空下处理掩模的方法,和特别地涉及处理被配置用于在真空系统中的基板上掩模沉积蒸发材料的掩模的方法。更特别地,本公开内容的实施方式和实施涉及用于掩模的载体、掩模处理模块、在掩模载体上装载掩模的方法,和在处理腔室中将掩模相对于基板对准的方法。
背景技术:
2.由于多种原因,使用有机材料的光电装置正变得越来越流行。用于制造这些装置的大多数有机材料相对便宜,以使得有机光电装置与无机装置相比具有成本优势的潜力。有机材料的固有性质可有利用于诸如在柔性或非柔性基板上沉积的应用。有机光电装置的实例包括有机发光装置(organic light emitting device;oled)、有机光电二极管、有机光伏电池,和有机光电探测器。
3.oled的有机材料可提供优于传统材料的性能优势。例如,有机发射层发射光的波长可容易地通过适当的掺杂剂调节。当在装置上施加电压时,oled利用发射光的薄的有机薄膜。oled正在变为用于诸如平板显示器、照明和背光的应用的日益感兴趣的技术。
4.材料,特别地有机材料,通常在低于大气压的压力下(即在真空下)沉积在真空腔室中的基板上。特别地对于红绿蓝(red
‑
green
‑
blue;rgb)oled制造,掩模在沉积期间被布置在基板的前面,其中所述掩模可具有界定开口图案的至少一个开口或多个开口,所述开口图案对应于将例如通过蒸发沉积在基板上的材料图案。基板通常在沉积期间布置在掩模的后面并且相对于掩模对准。例如,掩模载体可用于将掩模携载到真空系统的沉积腔室中,并且基板载体可用于携载基板到沉积腔室中以便将基板布置在掩模后面。
5.oled显示器制造需要增加基板尺寸以降低显示器的制造成本。对于rgb(红绿蓝)oled显示器,每个像素都包括用于红色发射、绿色发射和蓝色发射的有机材料。因此,发出不同颜色的有机材料是以各种图案沉积,所述图案将在微米尺度上彼此精确地相邻沉积。此图案是通过例如精细金属掩模(ffm)来产生。掩模通常包括掩模框架和掩模板,所述掩模板具有带多个小开口的图案。在显示器制造设施中,掩模通常是在水平定向上处理。
6.大面积基板可有利地以垂直或基本上垂直的定向处理。由于不断增加的基板大小,处理系统的占地面积可通过垂直处理来减小。像素定位精度(特别地在大面积基板上)可能会受到将掩模定向从水平定向改变为垂直定向的影响。考虑在例如1m2或以上的大面积上的微米范围的对准,施加在包括掩模框架和掩模板的掩模上的重力可能通过改变掩模定向而损坏对准。
7.因此,需要提高掩模处理和掩模对准以允许在大面积基板上的垂直基板处理。
技术实现要素:
8.鉴于上文,本发明提供了用于掩模的载体、掩模处理模块、在掩模载体上装载掩模
的方法,和在处理腔室中将掩模相对于基板对准的方法。本公开内容的进一步的方面、优点和特征是从权利要求书、说明书和附图中显而易见的。
9.根据一个实施方式,提供了一种用于掩模的载体。载体包括载体主体,具有被配置以面向掩模的至少一部分的表面,所述载体主体具有用于材料沉积的开口;和磁性保持布置,具有在所述载体主体的开口周围、布置在载体主体处的一个或多个磁性保持器。
10.根据一个实施方式,提供了一种掩模处理模块。掩模处理模块包括真空腔室;和电源,被配置以提供功率至掩模载体,用于在真空腔室之内切换一个或多个epm。
11.根据一个实施方式,提供了一种掩模处理模块。掩模处理模块包括真空腔室;支撑台,在真空腔室中用于支撑掩模载体,所述支撑台在非垂直定向(特别地水平定向)和非水平定向(特别地基本垂直定向)之间的角度可移动;升降杆组件,被配置以在支撑台上支撑具有掩模框架和掩模板的掩模;照相机,被配置以检测远离掩模载体并且相对于载体的掩模的位置;和一个或多个对准致动器,将掩模相对于掩模载体的位置对准。
12.根据一个实施方式,提供了一种在掩模载体上装载掩模的方法。方法包括利用磁性保持布置在水平定向上夹紧掩模的掩模框架,所述磁性保持布置具有在载体主体的开口周围、布置在载体主体处的一个或多个epm。
13.根据一个实施方式,提供了一种在处理腔室中相对于基板对准掩模的方法。所述方法包括通过具有一个或多个磁性保持器的磁性保持布置利用掩模载体支撑掩模,所述一个或多个磁性保持器在载体主体的开口周围、布置在掩模载体的载体主体处;利用基板载体支撑基板;利用掩模载体夹具系统支撑掩模载体,所述掩模载体夹具系统具有一个或多个第一掩模载体夹具和一个或多个第二掩模载体夹具;和相对于所述一个或多个第一载体夹具移动所述一个或多个第二掩模载体夹具以使掩模框架或掩模载体变形。
附图说明
14.因此以其中可详细理解本公开内容的上述特征的方式,上文简要概述的本公开内容的更具体描述可参考实施方式获得。附图涉及本公开内容的实施方式并且描述在下文中。在附图中示出并且在以下说明中详述典型的实施方式。
15.图1是由磁悬浮单元在支撑条件下提供的,根据本公开内容的实施方式的掩模载体的示意图;
16.图2是根据本文所述的实施方式的装载有掩模的掩模载体,并且进一步示出与具有基板的基板载体的关系的示意图;
17.图3a和图3b是根据本文所述的实施方式的在掩模载体上装载掩模的方法的操作的示意图;
18.图4a至图4g是根据本文所述的实施方式的处理掩模的方法的操作的示意图;
19.图5a至图5d是根据本文所述的实施方式的处理掩模的进一步方法的操作的示意图;
20.图6a是根据本文所述的实施方式的具有掩模的掩模载体、具有基板的基板载体,和例如作为对准器的一部分的掩模载体夹具系统的示意图;
21.图6b是根据本公开内容的实施方式且示例性地支撑掩模框架的具有磁性保持布置的载体的示意图;
22.图7是根据本文所述的实施方式的真空处理系统的示意图;
23.图8是示出根据本文所述的实施方式的装载掩模的方法的流程图;和
24.图9是示出根据本文所述的实施方式的对准掩模的方法的流程图。
具体实施方式
25.现将详细参考各种实施方式,所述实施方式的一个或多个实例在附图中示出。每一实例是通过说明来提供并且不意味着作为限制。此外,说明或描述为一个实施方式的一部分的特征可用于其他实施方式或结合任一其他实施方式一起使用,以产生更进一步实施方式。本公开内容旨在包括此类修改和变化。
26.在附图的以下说明中,相同的附图标记指代相同或类似的元件。通常,仅描述了关于各个实施方式的差异。除非另有说明,否则在一个实施方式中的一部件或方面的描述也适用于在另一实施方式中的对应部件或方面。
27.对于特别地在rgb oled装置制造期间的垂直oled蒸发,提供了用于有机材料的像素产生的掩模。掩模包括掩模框架和掩模板,即一个或多个掩模棒。例如,提供了细金属掩模(fmm)。在掩模板中提供了用于图案产生的多个开口。例如,通过制造设施中的处理机器人将掩模提供到处理系统中,所述处理系统在水平方向上产生oled装置的多个层。对于垂直oled蒸发,掩模从水平定向翻转到垂直定向或基本垂直定向。
28.在一些实施方式中,掩模可包括掩模框架和掩模板。掩模板可例如通过焊接永久地固定至掩模框架,或者掩模板可以可松动地固定到掩模框架。掩模可包括以图案形成的多个开口,用于通过掩模沉积工艺在基板上沉积对应的材料图案。在沉积期间,掩模可被布置在基板前面的近距离处或与基板的前表面直接接触。例如,掩模可以是具有多个开口(例如,100000个开口、1000000个开口或更多个开口)的细金属掩模(fmm)。例如,可以在基板上沉积有机像素的图案。在一些实施方式中,掩模可至少部分地由金属(例如,由具有小热膨胀系数的金属,诸如因瓦合金)制成。掩模板可包括磁性材料,以便掩模板可在沉积期间朝向基板被磁性地吸引。在一些实施方式中,掩模框架包括磁性材料,以便掩模框架可通过一个或多个磁性保持器被吸引到掩模载体。掩模可具有0.5m2或更大,特别地1m2或更大的表面积。例如,掩模的高度可以是0.5m或更大,特别地1m或更大;和/或掩模的宽度可以是0.5m或更大,特别地1m或更大。
29.由于在微米范围中(特别地对于大面积基板)的所需像素精度,定向的变化改变了重力的影响并且可能损坏像素对准。一种效果是掩模定向的改变可能导致掩模,尤其是掩模框架的扭曲、弯曲或鼓胀。例如,可能会出现“c形弯曲”。另一个效果在于掩模定向的改变会导致掩模框架的梁由于重力本身发生的梁变形。本公开内容的实施方式减少、防止和/或补偿了这些效果的组合。本发明提供了一种用于垂直oled蒸发的掩模框架集成的掩模载体、一种在掩模载体上装载掩模的方法,和一种对准掩模的方法。
30.本公开内容的实施方式提供了掩模载体和以实质上水平定向在掩模载体上装载掩模的方法。掩模载体被配置以提供预定的平面度和刚度。掩模框架用磁性保持布置夹紧到掩模载体上,以保证掩模框架的平面度。本发明提供了特别地在掩模定向改变时,抵消由掩模棒张力和框架重量力矩引起的掩模框架扭曲的反力。根据可与本文所述的其他实施方式结合的本公开内容的实施方式,掩模框架在水平定向上被夹紧至掩模载体(即,在可能发
生扭曲(弯曲或鼓胀,诸如“c形弯曲”)之前)。在掩模框架已通过磁性保持布置被充分固定至刚性掩模载体之后,提供了掩模定向朝向基本垂直定向的变化。因此,可以减少或防止掩模(例如,fmm)的变形。
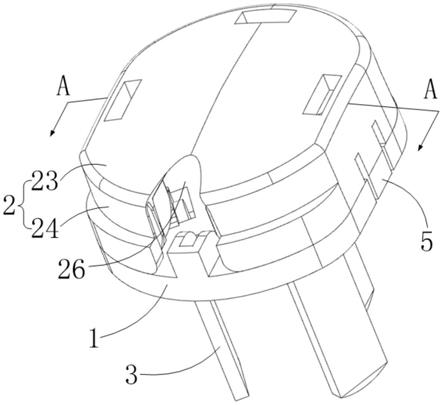
31.图1示出支撑掩模150的载体100。图1中所示的载体100是在真空处理系统中的传送条件下提供。载体通过磁悬浮系统10来支撑。图2示出处于水平位置的载体。根据本公开内容的实施方式,具有掩模框架152和掩模板252的掩模在水平定向上被装载在具有载体主体110的掩模载体上。图2中所示的在水平方向上支撑基板250的基板载体是仅出于说明性目的而提供。如参考图6a示例性地描述,利用掩模对基板250的掩蔽是以非水平定向(即,如本文定义的垂直定向)在处理腔室中提供。
32.如图1中示例性地示出,掩模载体100可在处理系统的输送期间和/或在沉积期间在非水平定向上携载掩模150。例如,掩模150可在输送期间和/或在沉积期间以基本垂直定向由掩模载体100保持。
33.如本文使用的装置的“非水平定向”可以是其中装置的主表面和水平面之间的角度是45
°
或更大,更特别地80
°
或更大的角度的装置定向。如本文使用的装置的“基本垂直定向”可理解为其中装置的主表面和重力矢量之间的角度是10
°
或更小的装置定向。例如,当掩模或掩模载体以基本垂直定向提供时,在掩模或掩模载体的主表面和重力矢量之间的角度是10
°
或更小。在一些实施方式中,掩模的定向在输送期间和/或在沉积期间可能不是(精确)垂直的,而是相对于垂直轴(例如,以
‑1°
和
‑5°
之间的倾斜角)略微倾斜。负角度指代其中掩模向下倾斜的掩模的定向。然而,在输送期间和/或在沉积期间的掩模或掩模载体的精确垂直定向( /
‑1°
)也是可能的。在本公开内容中对垂直定向的参考也理解为具有如上文所述的基本垂直定向,并且与例如水平定向相区分。如果要理解精确的垂直定向( /
‑1°
),那么所述垂直定向称为“精确垂直”。
34.图1示出夹紧至载体100的载体主体110的掩模150。载体主体110具有开口112。在基板处理期间,将沉积在基板上的材料可通过载体主体110的开口112。掩模通过具有一个或多个磁性保持器130的磁性保持布置夹紧至载体。一个或多个磁性保持器130被布置在载体主体110的开口112周围。磁性保持布置磁性地保持掩模框架152。掩模框架152支撑例如图2中所示的掩模板252。
35.图1进一步示出载体夹具接合元件120和载体夹具接合元件122。载体夹具接合元件可与夹具系统(例如,处理腔室中的载体夹具系统)的夹具相互作用。
36.本文所述的实施方式涉及用于掩模的载体。载体包括载体主体,所述载体主体具有被配置以面向掩模的至少一部分的表面,所述载体主体具有用于材料沉积的开口。载体进一步包括磁性保持布置,所述磁性保持布置具有在载体主体的开口周围、布置在所述载体主体处的一个或多个磁性保持器。根据可与本文所述的其他实施方式结合的一些实施方式,用于掩模的载体可包括六个或更多个载体夹具接合元件。根据本文所述的实施方式,在掩模载体上装载掩模的方法包括降低掩模朝向载体主体的表面,并且在水平定向上利用磁性保持布置夹紧掩模,特别地掩模框架。
37.图2示出掩模载体主体110。图2的横截面示例性地示出两个磁性保持器130。根据可与本文所述的其他实施方式结合的一些实施方式,一个或多个磁性保持器包括电永磁体。
38.与电磁体相比,电永久磁体通过在不施加电流的情况下提供保持力而有益。对于电永磁体,保持力可以打开和关闭。提供电流至电永磁体允许在保持状态和释放状态之间切换。在保持状态下,保持力开启。在释放状态下,保持力关闭。在不提供电流的情况下,电永磁体保持在当前状态。因此,例如在不具有连接到载体的电源的情况下,掩模框架可由包括电永磁体的磁性保持布置牢固地支撑。
39.电永磁体包括第一永磁体和至少第二永磁体。第一永磁体和至少第二永磁体被布置以使得第一永磁体和至少第二永磁体的相邻极性相同。可在第一永磁体和至少第二永磁体之间提供芯件,诸如钢芯。第一永磁体和至少第二永磁体可以是指定的“夹紧磁体”,以使得第一永磁体和至少第二永磁体形成“夹紧磁体组件”。电永磁体元件的夹紧磁体组件被配置以产生用于施加磁性保持力的磁场。
40.控制磁体组件包括至少一个控制磁体,所述控制磁体是可切换的永磁体。当至少一个控制磁体以第一极化作用极化时,由至少一个控制磁体产生的磁场将电永磁体元件配置为处于非磁化状态。通过切换至少一个控制磁体的极性,由至少一个控制磁体产生的磁场将电永磁体元件配置为处于磁化状态,以使得磁性保持力被施加。
41.电磁体可相邻于控制磁体定位。电磁体被配置以切换至少一个控制磁体的极性。电磁体可包括导电线的至少一个线圈或至少一个绕组。在电磁体的至少一个线圈中引入电流产生磁场,例如,反向磁场。当电磁体之内的反向磁场超过至少一个控制磁体固有矫顽力或者将消磁的电阻时,反向磁场使至少一个控制磁体的极性从第一极性切换到第二极性。将电流施加到线圈使得电永磁体元件从非磁化状态切换到磁化状态,且反之亦然。在施加电流到电永磁体元件并且随后去除电流之后,由电永磁体元件产生的磁场的配置保持稳定。因此,在不向磁性保持器提供进一步功率的情况下,电永磁体元件展示了双稳态行为。
42.图2示出具有用于磁性保持器的凹槽的载体主体110。载体主体可以每个磁性保持器包括一个凹槽。磁性保持器130可以与载体主体的表面111基本上齐平。可以为磁性保持布置提供齐平的epm。载体主体110的表面111分别面向与掩模框架152的掩模。如由线202所示,掩模框架的下表面可平行于载体主体110的表面111。可在掩模框架152和载体主体的表面111之间提供间隙210。根据可与本文所述的其他实施方式结合的一些实施方式,间隙可以是0.8mm或以下,诸如例如0.1mm至0.2mm。与具有掩模框架和掩模板的掩模相比,具有载体主体的载体是沉重且刚性的结构。例如,载体可具有200kg或以上的重量。此外,载体主体110的表面111的平面度可提供为100μm或更低。
43.本公开内容的实施方式指代具有多个磁性保持器的磁性保持布置,以使得载体主体的平面度可提供为对应于掩模框架的平面度。由掩模板的线204所示的参考表面可具有对应于掩模框架的平面度的平面度。由于掩模载体的刚性,掩模载体的平面度在改变支撑掩模的掩模载体的定向之后可被保持或基本上保持。在载体主体的开口周围提供磁性保持布置将掩模框架在多个位置处附接到掩模载体。因此,即使在垂直基板定向上,作用在掩模框架上的磁力也可模拟作用在水平定向上的重力。掩模框架足够平坦并且可以减少或防止掩模框架的扭曲、掩模框架的鼓胀等。
44.由磁性保持布置提供的磁性力在掩模框架的足够部分上延伸,例如,沿着载体主体的开口的周长的至少10%或周长的至少20%延伸。另外地或替代地,可提供至少八个磁性保持器。作为另一可选的修改,可在开口周围提供至少五个磁性保持器,所述磁性保持器
可选地分布或均匀地分布在开口的周边周围。
45.根据可与本文所述的各种实施方式结合的进一步实施,可在载体主体110和磁性保持器之间提供一个或多个高度调整元件232。磁性保持器(例如,电永磁体)的高度调整允许在载体主体110的表面111上的掩模框架的平面度的精细调整。例如,一个或多个垫片、螺钉、压电元件或其他装置可被提供用于磁性保持器130相对于载体主体的精细调整。例如,调整可具有30μm或更低,诸如从1μm到20μm的精度。
46.本公开内容的实施方式允许夹紧掩模框架,例如,磁性夹紧掩模框架至载体主体。平面度可提高到100μm或以下的水平。此外,可在接触掩模框架的磁性保持器的表面和掩模框架之间提供诸如弹性构件的摩擦控制元件,例如橡胶元件、粗糙化表面等等。掩模载体主体和掩模框架可包括允许热膨胀顺应性的材料。例如,掩模载体主体和掩模框架可包括使得热膨胀偏差小于10%的材料。例如,掩模载体主体和掩模框架可包括相同材料。
47.如上文所述,掩模(特别地掩模框架)可以水平定向附接到载体主体,所述水平定向具有允许所需像素定位精度的平面度。磁性保持布置允许以相对较大的面积将掩模框架固定到载体主体。为了防止在从水平到垂直定向的角度运动之后的掩模变形,掩模载体刚度作用于由于重力引起的变化力。根据可与本文所述的其他实施方式结合的一些实施方式,掩模载体刚度是掩模框架刚度的三倍或更多倍。特别地,掩模载体刚度可以是掩模框架刚度的五倍或更多倍。具有例如多个电永磁体的磁性保持布置为垂直定向保持与当掩模在水平定向组装到掩模载体中时的条件相同的掩模框架条件。
48.本发明提供了在用于显示器oled蒸发制造设备的掩模载体处的特别地具有电永磁体(electro permanent magnet;epm)的掩模集成(例如,fmm集成和ffm集成结构)。先前的方法试图通过使用额外的调节机构来抵消作用在掩模框架上的重力和/或通过模拟由重力引起的变形来移动掩模框架上的fmm棒的位置来补偿变形。本公开内容的实施方式可以通过将掩模框架和掩模载体与磁性保持布置集成在一起来消除所述额外的操作,其中掩模载体具有高得多的机械刚度。特别地,可减少或防止掩模框架的扭曲。作用在掩模载体上的重力可通过如下文所述的活动元件来补偿。然而,由于载体具有较高的机械刚度,因此促进了所述机械补偿。
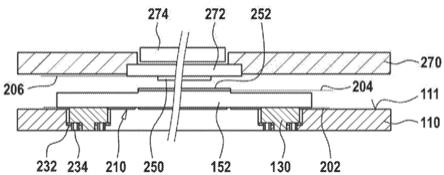
49.图2进一步示出增加的掩模框架平面度的优点。即使为垂直oled制造以垂直定向提供了掩模和基板的相对定位,图2示出靠近水平掩模的基板250。图2示出具有静电夹盘272的载体270。静电夹盘可包括为基板250产生静电力的多个电极。如图2中的线206所示,由于掩模的平面度,例如静电夹盘的基板接收表面的参考表面相对于掩模框架(且因此,相对于掩模板)可基本上平行。例如,掩模框架和基板载体的基板接收表面之间的相对平面度可以是200μm或以下。在沉积条件下,例如在掩模基板对准之后,在通过磁体274将掩模板252朝向基板250吸引时,在200μm或以下的范围中平行的参考表面和/或掩模板和基板的平面度允许良好的像素定位精度。
50.图3a和图3b示出根据本文所述的实施方式的在掩模载体上装载掩模的方法的操作期间的掩模载体100和掩模150。图3a示出具有开口112的载体主体110。在载体主体处提供多个磁性保持器130(例如,电永磁体)。掩模框架152可利用具有磁性保持器的磁性保持布置集成到载体主体110。在操作810处(见图8),掩模150通过支撑销330支撑在掩模载体100上。载体主体的表面111面向掩模(特别地,掩模框架152)的至少一部分。掩模框架152支
撑掩模板252。图3a示出诸如在升降杆330上定位掩模150的真空机器人的例如机器人臂的处理器302。在操作820处,掩模150朝向载体100的载体主体110的表面111下降。如上所述,可以在载体100的水平定向中提供掩模框架的预定平面度。在操作830处,掩模且特别地掩模框架通过磁性保持布置被磁性地夹紧到载体。
51.如图1中所示,掩模150包括掩模框架152。掩模框架可具有顶梁、底梁和连接顶梁与底梁的边梁。所述梁可单独地提供或者可一体形成。提供了多个磁性保持器130,例如epm。启动磁性保持器的顺序是从中心到边缘。由在掩模框架处的磁性夹紧期间的力矩引起的扭曲可因此降低。根据可与本文所述的其他实施方式结合的一些实施方式,一个或多个磁性保持器的第一磁性保持器在启动一个或多个磁性保持器的第二保持器之前启动,其中第一磁性保持器比第二磁性保持器更接近于掩模框架部分中心。例如,掩模框架部分可以是掩模框架的一个梁。
52.根据可与本文所述的其他实施方式结合的一些实施方式,在将掩模框架夹紧到载体之前,掩模150和载体的相对位置可被调整或对准。例如,如图3b中所示的照相机360或另一视觉系统可被提供以调整掩模150在水平面内的位置。
53.图4a至图4g是根据本文所述的实施方式的处理掩模的方法的进一步操作的示意图。由掩模载体410携载的第一掩模450从掩模载体卸载(参见图4a至图4d),且随后第二掩模452被装载在掩模载体410上(见图4e至图4g)。第一掩模450可以是将从真空系统卸载的已使用(例如,用于被清洁的)掩模,且第二掩模452可以是将被输送到真空系统的沉积腔室中以便用于蒸发工艺的清洁掩模。
54.图4a是掩模处理模块20的示意图,所述掩模处理模块被配置以将第一掩模450与掩模载体410分离并且以将第二掩模452与掩模载体410连接。例如,根据可与本文所述的其他实施方式结合的一些实施方式,掩模处理模块可在掩模装载站中提供。掩模处理模块20包括被配置以支撑掩模载体的掩模载体支撑件422。在一些实施方式中,掩模载体支撑件422在图4a中所示的基本水平定向(h)和非水平定向(例如,基本垂直定向)之间可移动。特别地,可提供致动器用于在非水平定向和基本水平定向之间改变掩模载体支撑件422的定向。
55.如在图4a中所示,掩模载体410可在掩模载体支撑件422上以基本水平定向支撑。例如,掩模载体可定位在掩模载体支撑件的一个或多个支撑区段的顶部,例如,在定向改变到基本水平定向之后。第一掩模450可用多个epm固定到掩模载体410。epm可切换到非保持状态以分离第一掩模450。随后,第一掩模450可例如利用多个升降杆330从掩模载体410升起,所述多个升降杆在基本垂直方向上相对于掩模载体支撑件422的支撑区段421可移动。
56.在一些实施方式中,从掩模载体410卸载第一掩模450可进一步包括将真空机器人的掩模保持部分432插入在已升举的掩模和掩模载体之间。特别地,在第一掩模已从掩模载体升举50mm或更大,特别地100mm或更大的距离之后,掩模保持部分432可插入在掩模载体410和第一掩模450之间的间隙中。图4c示出在插入真空机器人的掩模保持部分432之后的掩模处理模块。掩模保持部分432可以是真空机器人的可移动机械手,例如,包括用于在其上支撑掩模的一个或多个板区段和臂区段。
57.具有第一掩模450支撑在其上的掩模保持部分432可例如在垂直方向和/或水平方向移动离开掩模载体410,如在图4d中示意性示出。特别地,掩模保持部分432可将第一掩模
450传送到可布置在负载锁定腔室中的掩模保持器中。
58.在从掩模载体410卸载第一掩模450之后,第二掩模452在装载在掩模载体上,如图4e中示意性示出。将第二掩模452装载在掩模载体410上可包括利用真空机器人的掩模保持部分或者利用真空机器人的第二掩模保持部分410将第二掩模452移动到掩模载体410之上的位置。例如,第二掩模452可由真空机器人从在负载锁定腔室中提供的掩模架传送到掩模载体410上方的位置,同时掩模载体由掩模载体支撑件422在水平方向上支撑。
59.如图4e中示意性示出,第二掩模452可通过降低真空机器人的第二掩模保持部分433,直到第二掩模452与升降杆330接触并且由升降杆330支撑而定位在升降杆330上。随后,升降杆可降低直到第二掩模452放置在掩模载体410上为止。
60.在可与本文所述的其他实施方式结合的一些实施方式中,在掩模载体410上装载第二掩模452可进一步包括例如利用光学对准系统将第二掩模452相对于掩模载体410对准,所述光学对准系统被配置以在两个横向水平方向上将第二掩模452相对于掩模载体410对准。在图4f中示意性示出第二掩模相对于掩模载体的对准。
61.在对准第二掩模452之后,第二掩模452可附接到掩模载体410,特别地将epm切换为保持状态。根据可与本文所述的其他实施方式结合的一些实施方式,epm可分别在掩模框架装载站或掩模处理模块20处被供电。此后,由于epm的使用,掩模载体可移动通过处理系统而无需额外的电源。
62.在将第二掩模装载在掩模载体上之后,掩模载体支撑件的定向可从图4g中所示的基本水平定向改变为用于在处理系统中输送掩模和/或用于利用掩模在基板上蒸发材料的非水平定向。携载第二掩模452的掩模载体410可在非水平定向例如朝向沉积腔室在真空系统中输送。
63.定向的改变在图5a至图5d中示出。如图5a中示意性示出,根据本文所述的实施方式的掩模处理的方法包括在掩模载体410上装载第二掩模452(如上所述),所述掩模载体在真空系统中以基本水平定向(h)布置。掩模载体410可支撑在掩模载体支撑件422上,所述掩模载体支撑件以基本水平定向提供。
64.在掩模载体410上装载第二掩模452包括例如利用根据本文所述的实施方式的磁性保持布置,将第二掩模452,且特别地掩模框架附接到掩模载体410。图5b示意性示出第二掩模452被装载在且附接到掩模载体410,所述掩模载体在掩模载体支撑件422的支撑区段421上水平地支撑。
65.根据本文所述的一些实施方式的方法进一步包括将携载掩模的掩模载体410的定向从基本水平定向(h)改变为非水平定向(v),特别地改变为基本垂直定向,如图5c中示意性示出。例如,具有掩模载体410支撑在其上的掩模载体支撑件422可旋转45
°
或更大且135
°
或更小,特别地约90
°
的角度,直到掩模载体410被布置在图5c中所示的基本垂直定向为止。特别地,掩模载体的定向改变可包括旋转80
°
或更大且90
°
或更小的角度。特别地,可提供诸如电动机的致动器以用于改变掩模载体支撑件422的定向。如图5c中示意性示出,掩模载体410与附接到其上的掩模452一起移动一角度。由于掩模载体和磁性保持布置的刚性,掩模框架在水平定向上的平面度可在定向改变期间被保持。
66.根据本文所述的一些实施方式的方法进一步包括在真空系统中沿着输送路径(t)在非水平定向(v)上输送携载第二掩模452的掩模载体410。输送路径(t)可垂直于图5d的纸
平面延伸。例如,第二掩模452可以由掩模载体携载到沉积腔室中,其中第二掩模452可以用于通过第二掩模在基板上沉积蒸发材料。
67.掩模载体410可以通过掩模输送系统550,特别地通过磁悬浮系统在真空系统中非接触地输送。磁悬浮系统可包括多个有效可控的磁性轴承,所述磁性轴承被配置以在输送轨道551处无接触地保持掩模载体410。一个或多个距离传感器可测量输送轨道551和掩模载体410之间的间隙宽度,并且一个或多个有效控制的磁性轴承的磁悬浮力可取决于测量距离而被控制,以便将掩模载体相对于输送轨道551维持处于基本恒定的距离。
68.如上所述,可通过将掩模框架与在掩模载体处的磁性保持布置集成来减少或防止掩模框架扭曲、弯曲或鼓胀(即掩模框架与平面的偏差)。此外,在改变掩模载体的定向并且因此改变掩模框架到垂直定向时,重力施加在掩模载体和掩模上而与扭曲无关。在传送掩模载体期间,掩模载体顶梁(即,掩模载体的上部杆)可均匀地升举。图1示意性示出磁悬浮系统的一部分。可提供多个磁性轴承以在悬空状态下提供掩模载体100。通过磁性轴承的受控致动,且特别地吸引掩模载体的磁性轴承的不同致动,可提供掩模载体顶梁的均匀性。例如,与作用在掩模载体顶梁边缘处的磁性轴承相比,作用在掩模载体顶梁中心处的第一磁性轴承可提供更大的力。
69.根据可与本文所述的其他实施方式结合的进一步实施方式,作用在掩模载体上的重力也可在基板处理期间,即在利用掩模时在基板上沉积材料期间被补偿。在处理腔室中,例如利用磁悬浮系统输送的掩模载体可输送到机械支撑系统。机械支撑系统可在真空沉积腔室中支撑掩模载体。此外,机械支撑系统可额外支撑基板载体。
70.如图1中所示,载体100包括载体夹具接合元件120和载体夹具接合元件122。根据可与本文所述的其他实施方式结合的一些实施方式,可提供六个或更多个载体夹具接合元件。载体夹具接合元件可以是夹具销、磁性板,或允许夹具系统与载体相互作用的另一结构。夹具系统是例如参考由图6a所示的实施方式来描述。
71.如图1中示意性示出,根据本公开内容的一些实施方式的载体可包括一个或多个第一载体夹具接合元件120和一个或多个第二载体夹具接合元件122。第一载体夹具接合元件120对应于载体夹具系统的第一载体夹具,且第二载体夹具接合元件对应于载体夹具系统的第二载体夹具。例如,可提供四个第一载体夹具接合元件120。如图1中所示,四个载体夹具接合元件120可相邻于载体100的角部。上部载体夹具接合元件可在垂直方向上提供载体相对于载体夹具系统的固定位置。上部载体夹具接合元件或载体夹具系统可在水平方向上提供各个支撑件的顺应性。下部载体夹具接合元件120可在垂直和水平方向上提供支撑件的顺应性。第二载体夹具接合元件122的一个载体夹具接合元件(例如,在载体顶梁处的载体夹具接合元件122)可提供载体相对于载体夹具系统的固定位置。例如,上部第二载体夹具接合元件122可提供定位参考点。可提供在沉积腔室中的载体位置的精细调整。
72.根据可与本文所述的其他实施方式结合的一些实施方式,第二载体夹具接合元件的一个可被配置用于动态调整。载体夹具系统可向在例如图1中所示的下部载体夹具接合元件122处向载体提供垂直(基本上垂直)力。作用在载体上的重力可通过利用夹具系统施加到载体的力有效地补偿。
73.根据可与本文所述的其他实施方式结合的一些实施方式,一个或多个第一载体夹具接合元件120可利用机械支撑系统(例如,载体夹具系统)提供对载体的支撑。例如,可提
供四个第一载体夹具接合元件。根据可与本文所述的其他实施方式结合的一些实施方式,支撑件在平行于基板载体的平面的一个或两个方向上的顺应性可避免可能最终引入扭曲力的位置的机械过度限定。第一载体夹具接合元件的一个或多个可提供在载体平面中的第一顺应性。第一载体夹具接合元件的一个或多个可提供在载体平面中的第二顺应性,所述第二顺应性与第一顺应性不同。
74.另外地或替代地,第二载体夹具接合元件122的一个或多个(例如,相邻于载体中心提供的载体夹具接合元件)可提供参考位置。参考位置允许在真空沉积腔室中调整载体位置。再进一步另外地或替代地,相邻于载体中心提供的一个或多个第二载体夹具接合元件122可被配置用于例如通过载体的变形,来动态调整像素定位精度。由来自例如载体夹具系统的力的载体变形可抵消作用在载体上的重力。
75.根据可与本文所述的其他实施方式结合的一些实施方式,可在六个或更多个位置处提供载体上的载体夹紧、真空沉积腔室中的载体夹具系统的载体夹具,和/或载体夹具接合元件。六个或更多个位置可以是至少四个外部位置和两个内部位置,所述内部位置水平地位于外部位置之间。
76.参考图6a描述本公开内容的实施方式的另外或替代的修改。在下文中。图6a示出用于携载掩模150的载体100和用于携载基板250的载体270。在图6a中进一步示出被配置以示例性支撑载体100的载体夹具系统600。载体夹具系统600可例如被提供至或耦接至沉积腔室的真空腔室的壁650。载体夹具系统600可包括载体夹具602。载体夹具602可与载体100的载体夹具接合元件520交互作用或接合。例如,可在夹具接合元件520处提供载体夹具销522。图6a中所示的载体夹具系统600被配置以夹紧载体100用于支撑掩模150。另外地,载体夹具系统可包括载体夹具(未示出)以与基板载体270的载体夹具接合元件接合或相互作用。
77.图6a中所示的载体100包括具有开口112的载体主体110。此外,一个或多个磁性保持器130耦接至载体主体110。载体100包括机械耦合524。机械耦合524将磁性保持器130耦接至载体夹具接合元件520。如由图6a中的箭头所示,在移动载体夹具602之后,可移动磁性保持器130。根据可与本文所述的其他实施方式结合的一些实施方式,磁性保持布置的磁性保持器可相对于载体主体110,特别地在垂直方向上移动。如图6a中所示的载体夹具接合元件520允许施加力到附接至磁性保持器130的掩模框架152。例如,相邻于或在载体100的中心处提供的磁性保持器可移动以补偿重力变形。磁性保持器的移动可作用于连接到磁性保持器的掩模框架上。
78.根据可与本文所述的其他实施方式结合的一些实施方式,载体100的载体夹具接合元件的至少一个载体夹具接合元件耦接到磁性保持布置的至少一个磁性保持器,以平行于载体主体的表面移动磁性保持器。耦接到载体夹具接合元件的磁性保持器通过移动载体夹具系统600的载体夹具接合元件和/或载体夹具602可移动。
79.图6b示出载体100的进一步示例性说明。参考下文中的图6b描述本公开内容的实施方式。载体100包括具有开口的载体主体110。多个磁性保持器130在载体主体中的开口周围布置。此外,可提供如本文所述的夹具接合元件520。
80.根据可与本文所述的其他实施方式结合的一些实施方式,在载体主体的开口的第一侧上提供一个或多个,例如两个或更多个夹具接合元件520。例如,第一侧可以是在载体
100的操作定向中的上侧。此外,在与第一侧相对的开口的第二侧上提供一个或多个,例如两个或更多个夹具接合元件520。例如,第二侧可以是在载体100的操作定向中的下侧。
81.根据可与本文所述的其他实施方式结合的一些实施方式,提供了三个上部载体接合元件520并且提供了三个下部载体接合元件。上部载体接合元件的一个是在其他两个上部载体接合元件之间提供。下部载体接合元件的一个是在其他两个下部载体接合元件之间提供。例如,第一上部载体接合元件可以在或相邻于中心和/或第一下部载体接合元件可以在或相邻于中心。第一上部载体接合元件可利用机械耦合(例如,杆件)耦接至磁性保持器130。再进一步,另外地或替代地,第一下部载体接合元件可利用机械耦合524(例如,杆件)耦接至磁性保持器130。
82.如图6b中所示,掩模框架152可利用磁性保持器130附接至载体100。根据本公开内容的实施方式的包括电永磁体的磁性保持器130可耦接至载体主体110或与载体主体110集成。根据可与本文所述的其他实施方式结合的一些实施方式,将磁性保持器集成在载体上的顺应性可提供用以维持微米级精度的顺应性,尽管存在热膨胀和/或其他扭曲,即其他扭曲影响。
83.如图6b中的放大部分所示,根据可与本文所述的其他实施方式结合的一些实施方式,磁性保持器130可用线性引导元件642支撑在载体主体110上。例如,可在磁性保持器130和线性引导元件642之间提供轴承643。具有线性引导元件642的支撑件允许在自如箭头632所示的至少一个方向上相对于载体主体110的磁性保持器130的平移。另外地,可提供第二线性引导元件644和第二轴承645。具有第二线性引导元件644的支撑件允许在自如箭头633所示的至少第二方向上相对于载体主体110的磁性保持器130的进一步平移。
84.根据可与本文所述的其他实施方式结合的进一步实施方式,磁性保持器130相对于载体主体110的顺应性可通过铰链元件来提供,其中在板中形成允许磁性保持器在第一方向上运动并且将磁性保持器在不同于第一方向的第二方向(例如,垂直于第一方向的方向)固定的结构。铰链元件进一步允许将磁性保持器相对于载体主体移动至各个方向,例如,移动至垂直方向。磁性保持器可在垂直于第一方向和/或第二方向的第三方向上相对于载体主体固定。
85.图6b示出x轴方向和y轴方向。在垂直基板处理系统中的载体的传送期间或在垂直基板处理系统中的基板的处理期间,载体的x轴方向可对应于水平方向。载体的y轴方向对应于垂直,即基本垂直方向。根据可与本文所述的其他实施方式结合的一些实施方式,提供了至少两个上部磁体保持器130。第一上部磁体保持器130可耦接到载体主体110,所述载体主体沿x轴方向可移动并且在y方向上固定。第二上部磁体保持器可耦接到载体主体110以沿着y轴方向可移动。再进一步,第二上部磁体保持器也可在x轴方向上固定。根据可与本文所述的其他实施方式结合的一些实施方式,第三上部磁体保持器可与第一上部磁体保持器类似地耦接到载体主体110。可在第一上部磁体保持器和第三上部磁体保持器之间提供第二上部磁体保持器。
86.根据可与本文所述的其他实施方式结合的一些实施方式,可如箭头631所示移动的第二上部磁体保持器可例如通过机械耦接524机械地耦接到夹具接合元件520。因此,如上所述,夹具接合元件的移动产生磁性保持器130的移动。
87.根据可与本文所述的其他实施方式结合的一些实施方式,提供了至少两个下部磁
体保持器130。第一下部磁体保持器130可耦接到载体主体110,所述载体主体沿x轴方向可移动并且在y方向上可移动。第二下部磁体保持器可耦接到载体主体110以沿着y轴方向可移动。再进一步,第二下部磁体保持器可在x轴方向上固定。根据可与本文所述的其他实施方式结合的一些实施方式,第三下部磁体保持器可与第一上部磁体保持器类似地耦接到载体主体110。可在第一下部磁体保持器和第三下部磁体保持器之间提供第二下部磁体保持器。根据可与本文所述的其他实施方式结合的一些实施方式,可如箭头631所示移动的第二下部磁体保持器可例如通过机械耦接524机械地耦接到夹具接合元件520。因此,如上所述,夹具接合元件的移动产生磁性保持器130的移动。
88.根据可与本文所述的其他实施方式结合的更进一步实施方式,一个或多个磁性保持器可分别在掩模框架的一侧或在掩模主体110中的开口处提供。一个或多个磁性保持器可分别在开口或掩模框架的每一侧提供。根据可与本文所述的其他实施方式结合的一些实施方式,侧磁性保持器可以是可移动方向并且在y轴方向上可移动。
89.上述实施方式涉及一个或多个磁性保持器与载体主体之间的连接以具有顺应性或可在一个或多个方向上移动。因此,例如在一个或多个方向上的由于热膨胀的载体框架的运动是自由的。例如在z轴方向上的其他方向的运动可以是固定的。
90.如上所述,载体的顶梁的顶梁变形可通过磁悬浮系统的磁性轴承补偿,载体变形可通过施加在载体的载体夹具接合元件上的力补偿,或者变形可由施加在掩模框架上的力,特别地通过磁性保持器的运动来补偿。磁性保持器的运动可通过载体夹具接合元件的运动和载体夹具接合元件与磁性保持器之间的机械耦合来提供。这些补偿机构可单独提供或彼此结合来提供。
91.图6a进一步示出夹紧至基板载体270的静电卡盘272的基板。在处理腔室中,由基板载体支撑的基板被传送到掩模的后面,即掩模被提供在沉积源(诸如用于有机材料的蒸发源)和由基板载体支撑的基板之间。
92.可提供基板和掩模的对准。例如,可在真空沉积腔室中提供照相机690或另一视觉系统。光学掩模对准模块可以向用于对准的夹持系统的致动器提供反馈。分别平行于基板或掩模的平面的掩模和基板的对准,可以通过具有致动对准致动器的载体夹具系统来提供。此外,载体夹具系统可以允许分别垂直于基板或掩模的平面对准。特别地,基板和掩模可以对齐以平行。由于通过掩模载体处的磁性保持布置集成的掩模的平面度,平行对准得到改善。基板可以靠近掩模板。此后,掩模板被磁体274夹持至基板上以便利用沉积材料产生图案。根据一些实施方式,掩模和基板的对准可相对于彼此提供,即掩模和/或基板可以通过例如夹持系统的对准致动器移动。考虑到在垂直定向上提供像素定位精度的挑战,特别地对于大面积基板,对准系统可以相对于掩模分别移动基板或基板载体。由对准系统夹持系统施加至掩模载体的力可允许用于掩模的载体的变形补偿的精细调整。
93.具有对准致动器的载体夹具系统或包括载体夹具的对应对准系统可以允许在xy平面内的动态调整,所述平面即掩模板的平面或基板载体的基板接收表面;和在z轴方向上的动态调整,此方向即垂直于掩模板的平面或基板载体的基板接收表面的方向。反馈控制可以由视觉系统来提供,例如图6a中所示的照相机690。由重力引起的掩模载体变形可通过向载体的一个或多个载体夹具接合元件施加力来补偿。
94.图9示出了在处理腔室中相对于基板对准掩模的方法。在操作910处,掩模通过磁
性保持布置由掩模载体支撑,所述磁性保持布置具有在载体主体的开口周围、布置在掩模载体的载体主体处的一个或多个磁性保持器。在操作920处,基板是由基板载体支撑。在操作930处,掩模载体是由机械支撑件支撑,例如具有一个或多个第一掩模载体夹具和一个或多个第二掩模载体夹具的掩模载体夹具系统。在操作940处,一个或多个第二掩模载体夹具相对于一个或多个第一载体夹具移动以使掩模框架或掩模载体变形。因此,可补偿重力引起的载体变形。进一步的可选操作可包括相对于一个或多个基板位置标记光学检查一个或多个掩模位置标记。
95.图7示出了根据本公开内容的实施方式的真空处理系统700。真空处理系统包括多个沉积腔室701,其中每个沉积腔室容纳沉积源,例如蒸发源705。然而,本公开内容不限于具有蒸发源的真空系统。例如,可以提供化学气相沉积(chemical vapor depositio;cvd)系统或其他物理蒸发沉积(physical evaporation deposition;pvd)系统,例如溅射系统。
96.蒸发源705包括配置成蒸发材料的蒸发坩埚,以及具有多个开口的分配管,用于将蒸发的材料导向布置在沉积腔室的沉积区域中的基板。分配管可在基本垂直方向上延伸。在一些实施方式中,分配管可以可旋转地安装。例如,分配管可以在沉积腔室的第一沉积区域和沉积腔室的第二沉积区域之间旋转,其中第一沉积区域和第二沉积区域可以布置在蒸发源705的相对侧。因此,在布置在第一沉积区域中的第一基板上沉积蒸发材料之后,分配管可旋转大约180
°
的角度以将蒸发材料沉积在布置在沉积腔室的第二沉积区域中的第二基板上。在图7中,示例性地示出了在蒸发源705的相对侧上的沉积腔室702的两个沉积区域中的两个基板715。为了简单起见,其余基板未在图7中示出。
97.真空处理系统700可以是被配置以用(例如,用于显示器应用的)层堆叠涂布基板(例如,薄玻璃基板)的真空沉积系统。基板可以附接到真空系统中的基板载体,并且基板载体可以由基板输送系统输送通过真空系统。基板载体可由基板输送系统依次输送到多个沉积腔室中,以便在基板上沉积不同材料的堆叠。基板的主表面可以在沉积腔室中涂覆有薄涂层,同时基板位于蒸发源的前面,蒸发源以预定速度移动经过基板。或者,基板可以在沉积期间以预定速度输送通过涂覆装置。
98.基板可以是非柔性基板,例如,晶片、诸如蓝宝石等透明晶体切片、玻璃基板或陶瓷板。然而,本公开内容不限于此,并且术语基板也可以包括柔性基板,诸如卷材或箔,例如金属箔或塑料箔。
99.在一些实施方式中,基板可以是大面积基板。大面积基板可具有1m2或更大的表面积。具体地,大面积基板可用于显示器制造,并且可为玻璃或塑料基板。例如,如本文所述的基板应包括通常用于液晶显示器(liquid crystal display;lcd)、等离子体显示面板(plasma display panel;pdp)等的基板。在一些实施方式中,大面积基板可以是gen 4.5,其对应于约0.67m2的基板(0.73 x 0.92m);gen 5,其对应于约1.4m2的基板(1.1m x 1.3m),或更大的基板。大面积基板或载体可进一步是gen 7.5,其对应于约4.29m2的基板(1.95m x 2.2m);gen 8.5,其对应于约5.7m2的基板(2.2m x 2.5m);gen 10,其对应于约8.7m2的基板(2.85m x 3.05m)。可同样地实施诸如gen 11和gen 12的甚至更大世代的基板和相应的基板面积。在oled显示器制造中也可能提供gen代的一半尺寸。在一些实施方式中,具有低至几平方厘米的表面积的较小尺寸基板的阵列,例如,2cm x 4cm和/或各种单独的形状可以放置在单个基板支架上。在一些实施方式中,掩模可以大于基板以在沉积期间提供与基板
的完全重叠。在一些实施中,基板在垂直于基板主表面的方向上的厚度可以是1mm或更小,例如从0.1mm到1mm。
100.真空处理系统700进一步包括掩模处理模块20,其被配置以在真空下连接和分离掩模和掩模载体。掩模处理模块20进一步被配置为在基本水平定向(h)和非水平定向(v)(特别是基本垂直的取向)之间改变掩模的定向。在一些实施方式中,掩模处理模块20被配置为改变掩模载体连同附接到其上的相应掩模的定向,如本文所述。
101.根据本公开内容的实施方式,掩模处理模块包括用于将载体的磁性保持布置的电永磁体从支撑状态切换到非支撑状态的电源。
102.根据一个实施方式,掩模处理模块可以包括真空腔室、在真空腔室中用于支撑掩模载体的支撑台或掩模载体支撑件422,所述支撑台可由在非垂直定向(特别地水平定向)和非水平定向(特别地基本垂直定向)之间的角度移动。掩模处理模块进一步包括升降杆组件,其被配置为在支撑台上方支撑具有掩模框架和掩模板的掩模;照相机,被配置为检测在掩模载体上方远离并且相对于载体的掩模的位置;和一个或多个对准致动器,将掩模相对于掩模载体的位置对准。
103.真空处理系统700进一步包括掩模输送系统,所述掩模输送系统被配置为在掩模处理模块20和多个沉积腔室701之间以非水平定向输送携载掩模的掩模载体。例如,要使用的掩模可以通过具有磁性保持布置的掩模处理模块20固定到相应的掩模载体,并且可以由输送系统输送到相应的沉积腔室。
104.掩模处理模块20可被配置为在基本上水平定向和非水平定向之间改变掩模,特别是连同携载掩模的掩模载体一起的定向。
105.特别地,掩模处理模块20可包括掩模载体支撑件422,所述掩模载体支撑件被配置为支撑掩模载体410并且在基本上水平定向和基本上垂直定向之间改变掩模载体的定向。例如,可提供致动器用于在非水平定向(v)和基本水平定向(h)之间改变掩模载体支撑件422的定向。
106.在一些实施方式中,掩模处理模块20进一步可以包括真空机器人730。真空机器人可以被配置为从由掩模载体支撑件支撑的掩模载体卸载掩模。真空机器人可进一步被配置以在由掩模载体支撑件支撑的掩模载体上装载掩模。
107.真空机器人730可以在真空系统的真空腔室中靠近掩模载体支撑件422提供,并且一个、两个或更多个负载锁定腔室708可布置在真空腔室附近。掩模保持器,例如掩模架70可设置在负载锁定腔室708中或负载锁定腔室708处。真空机器人730可以被配置为在一个、两个或更多个负载锁定腔室708和掩模载体支撑件422之间传送掩模。
108.如图7中示意性示出,真空系统可以包括一个单个掩模处理模块20,用于处理分配到多个沉积腔室701(特别是四个、六个、八个、十个或更多个沉积腔室)中的掩模。
109.在可以与本文所述的其他实施方式结合的一些实施方式中,真空系统包括主输送路径,具有用于沿着主输送路径输送掩模载体和基板载体的输送轨道;掩模处理模块20,连接到主输送路径的第一部分;基板处理模块715,被配置为连接和分离基板和基板载体,所述基板和基板载体连接到主输送路径的第二部分;和多个沉积腔室701,连接到主输送路径的第三部分。主输送路径可以在基本上线性的方向上延伸,第一部分可以是主输送路径的第一端部分,且第二部分可以是主输送路径的第二端部分。第三部分可以部分地或完全地
设置在第一部分和第二部分之间。
110.虽然前述内容涉及本公开内容的实施方式,但是可在不背离本公开内容的基本范围的情况下设计本公开内容的其他和进一步实施方式,并且本公开内容的范围是由随附的权利要求书确定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。