1.本发明涉及舰炮系统检测技术领域,尤其是涉及一种舰炮随动系统检测仪。
背景技术:
2.舰炮随动系统主要控制炮管的高低角和方位角,高低角是指炮管和甲板水平线之间的夹角,方位角是指炮管和我船航向线之间的夹角。高低角和方位角两路随动子系统,均采用大功率三相电机。因为常年在海上高温、高湿等恶劣环境下使用,所以在靠岸后,需要对随动系统进行多个项目的检查和维护。
技术实现要素:
3.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种舰炮随动系统检测仪。
4.本发明的目的可以通过以下技术方案来实现:
5.一种舰炮随动系统检测仪,包括箱体和箱盖,所述箱体和箱盖的一侧通过第一转轴连接,相对的另一侧通过弹簧扣卡合,所述箱体在弹簧扣所在的一侧设有提手,所述箱体中设有计算机主机,箱体的顶部设有加固键盘,所述箱盖内设有加固显示器,所述加固键盘和加固显示器均与所述计算机主机连接;所述计算机主机包括处理器板、存储器板、io并口板、422串口板和电源模块,所述io并口板接有至少两个io并口航空插座,所述422串口板接有至少两个422串口航空插座,所述422串口航空插座设有防护盖;所述箱盖与箱体相接触的边缘设有一圈密封垫。
6.优选的,所述处理器板、存储器板、io并口板、422串口板均与cpci总线连接。
7.优选的,所述箱体和箱盖采用全封闭设计。
8.优选的,所述箱体和箱盖的材料为铝镁合金。
9.优选的,所述io并口航空插座和422串口航空插座设置在第一转轴所在的箱体侧面。
10.优选的,所述箱体和箱盖的边角为弧形。
11.优选的,所述提手的外侧由硅胶皮包裹。
12.优选的,所述422串口航空插座伸出箱体,所述422串口航空插座的上侧通过第二转轴与防护盖连接,所述第二转轴套有扭簧。
13.优选的,所述计算机主机采用labview软件实现对舰炮随动系统的检测。
14.优选的,所述计算机主机内设有对舰炮随动系统的高低角子系统和方位角子系统的检测程序。
15.与现有技术相比,本发明具有以下优点:
16.1、采用箱式外观结构设计,即可以保护显示屏和键盘,又方便携带,尤其在船厂作业,提高了检测设备的便携性;因为在船上作业,工作情况复杂,甚至有跌落入水的危险,检测仪采用无风扇散热设计,整体密封性好,防水性强。
17.2、舰炮随动系统的通信接口即有串行接口,也有并行接口,检测仪的串口和并口插座各设有2个,增加了检测仪的通用性。
附图说明
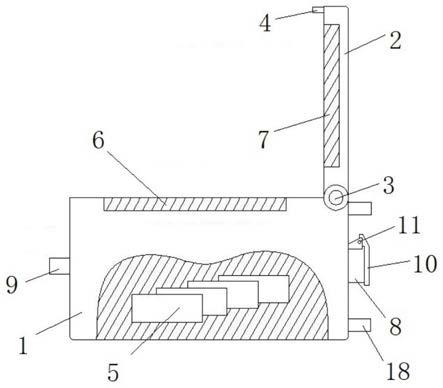
18.图1为本发明检测仪的结构示意图;
19.图2为本发明检测仪的计算机主机结构示意图。
20.图中标注:1、箱体,2、箱盖,3、第一转轴,4、弹簧扣,5、计算机主机,6、加固键盘,7、加固显示器,8、航空插座,9、提手,10、防护盖,11、第二转轴,12、处理器板,13、存储器板,14、io并口板,15、422串口板,16、电源模块,17、cpci总线,18、支脚。
具体实施方式
21.下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
22.实施例
23.如图1所示,本技术提出一种舰炮随动系统检测仪,包括箱体1和箱盖2,箱体1和箱盖2的一侧通过第一转轴3连接,相对的另一侧通过弹簧扣4卡合,箱体1在弹簧扣4所在的一侧设有提手9,提手9的外侧由硅胶皮包裹。箱体1中设有计算机主机5,箱体1的顶部设有加固键盘6,箱盖2内设有加固显示器7,加固键盘6和加固显示器7均与计算机主机5连接。
24.如图2所示,计算机主机5包括处理器板12、存储器板13、io并口板14、422串口板15和电源模块16。处理器板12、存储器板13、io并口板14、422串口板15采用cpci总线17通信。io并口板14接有至少两个io并口航空插座8,422串口板15接有至少两个422串口航空插座8。
25.本检测仪采用无风扇散热设计,内部板卡设置了散热片,箱体1和箱盖2采用铝镁合金材料,能实现被动散热,不需要设置散热孔。在箱盖2与箱体1相接触的边缘设有一圈密封垫,进一步提高整体的防水性能。箱体1和箱盖2的边角为弧形,防止碰撞损伤。
26.具体的,io并口航空插座8和422串口航空插座8设置在第一转轴3所在的箱体1侧面。422串口航空插座8伸出箱体1并设有防护盖10,422串口航空插座8的上侧通过第二转轴11与防护盖10连接,第二转轴11套有扭簧,可以压紧防护盖10。航空插座8所在的箱体1侧面设有支脚18,可以让箱体1竖直放置。
27.检测仪对舰炮随动系统高低角和方位角两路随动子系统分别进行检测,检测仪对高低角子系统做“高低阶跃”、“高低等速”、“高低正弦”检测。检测仪对方位角子系统做“方位阶跃”、“方位等速”、“方位正弦”检测。对于“高低阶跃”、“高低等速”、“高低正弦”检测的方法具体如下,方位角子系统的检测方法类似。
[0028]“高低阶跃”检测:检测仪向高低角随动子系统直接发送高低角的角度参数。高低角随动子系统根据子系统自身的pid算法,控制电机的启停、转速和转向,将炮管转到检测仪设定的高低角。然后,对炮管的实际高低角进行测量,再计算得出高低角的设定值和实际值之间的误差。经过检测仪多次设定,得出一组高低角的误差,总结出一定规律后,对舰炮随动系统进行维护。
[0029]“高低等速”检测:检测仪向高低角随动子系统直接发送电机转速参数。高低角随动子以检测仪设定的电机转速,将炮管转到高低角的最大值。同时,在炮塔内读取舰炮随动系统的高低角随动子系统的电机转速参数。再计算得出转速的设定值和实际值之间的误差。经过检测仪多次设定,得出一组转速的误差,总结出一定规律后,对舰炮随动系统进行维护。
[0030]“高低正弦”检测:检测仪不停地向高低角随动子系统发送高低角参数。高低角参数组与发送时间为正弦函数关系。此正弦函数的波峰为炮管高低角的最大允许值,波谷为炮管高低角的最小允许值。炮管连续正常运动达到连续工作合格时间,则判定舰炮随动系统正常。
[0031]
计算机主机5可采用labview软件实现对舰炮随动系统的检测。检测仪的软件整体框架采用事件队列设计模式。事件队列设计模式较之传统的循环设计模式cpu资源占用少,响应速度快。
[0032]
由加固键盘6人工装定检测项目和装定值,如果与随动系统采用串口通信,则把装定值按照串口通信协议,转换成十六进制数,发送给随动系统;如果与随动系统采用并口通信,则把装定值按照并口通信协议,转换成十六进制数,再按照汉明码编码,发送给随动系统。传统的奇偶校验只能检错,汉明码则具有检错和纠错的双重功能,非常适合并口通信。
[0033]
舰炮随动系统的反馈值可分为两组显示:波形图显示和指针图显示。指针图用于直观地显示炮管当前的位置;波形图用于记录伺服系统的运动轨迹,尤其是记录运动轨迹中跳变点。
[0034]
检测仪软件还可以设置监控底层通信的十六进制数据,以检测串口或并口数据的传输是否发生错误。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。