1.本发明属于公共交通优先控制技术,具体为一种无专用路权环境下公交准点率优化感应式控制方法。
背景技术:
2.以私人交通为主的低效的个体交通占用了大量的道路资源,导致原本有限的道路资源变得更加稀缺,交通拥堵问题愈演愈烈。为了缓解城市交通拥堵,我国自20世纪80年代开始提倡绿色交通,优先发展公共交通事业。
3.在我国,准点率作为公交运行可靠性及服务水平的重要体现,是乘客规划出行的决策因素之一。然而,公交车辆在交叉口的停车延误严重影响公交系统运行及服务水平。相关数据表明,公交车辆在交叉口产生的延误占行程总延误的50%,达到整个行程时间的10%
‑
20%。为了改善这一问题,通常设置公交专用道实现公交在空间上的优先控制,这种方式需要较高的道路资源基础且成本不低,尤其在重点拥堵交叉口因管理缺陷容易出现社会车辆占用情况,专用路权下的公交优先控制存在资源分配不公现象。另外,在无公交专用路权的情况下,公交实际运行过程中往往受路段交通流波动、信号控制等因素的干扰,不可避免的早于或晚于中间站点的计划到达时刻,而路段中存在的行驶波动无法通过末站的到达情况判断。
4.为了提高公交运行可靠性,增加公共交通的吸引力,提高城市交通的运输效率。现有的一些公开专利与论文中都提出了相关公交优先控制方案。专利号cn103794066a公开了一种无公交专用车道的公交优先通行信号控制方法,利用公交车载单元获取公交车辆信息并发出优先请求,通过路侧信号收发机检测优先请求,实现公交优先通行。
5.该方法在无公交专用道方向的相关研究中较为新颖,但仍存在不少问题:
6.(1)首先,该专利中采用的公交车载单元集成无线通信模块和gps模块,但gps数据精度较低,误差较大,需要对比公交信息库才能获取公交车辆的运行线路及所属相位。这种检测方式不能很好满足交叉口秒级信号控制系统对公交车辆信息精准且快速获取的需求。
7.(2)其次,该专利获取公交优先请求的方式是通过不断建立公交车载单元与信号收发机之间的发收关系,属于被动式接收请求,而非主动式检测请求,增加了控制系统的繁琐程度。
8.(3)最后,该专利未结合公交早晚点状态,采用请求即优先原则,可能造成盲目优先情况。同时未考虑优先控制前后整体交叉口的延误效益变化,继而无法保证该控制方法利弊平衡。
技术实现要素:
9.本发明提出了一种无专用路权环境下公交准点率优化感应式控制方法。
10.一种无专用路权环境下公交准点率优化感应式控制方法具体过程为:
11.步骤1:获取无专用路权道路上的社会车辆及公交车辆信息,确定目标公交所处车
道及对应相位以及目标公交到停止线的距离;
12.步骤2:确定目标公交车在无专用路权进口道处的运行状态;
13.步骤3:预测不同运行状态下目标公交车上下游站间行程时间;
14.步骤4:判断公交车正晚点状态,计算公交车相位初始控制时间;
15.步骤5:将计算得到的相位初始控制时间用于绿时相位和红时相位时长的初步调整,控制交叉口晚点公交车优先通行;
16.步骤6:计算初步调整红绿灯时长后公交优先相位与非公交优先相位的正负延误效益变化;
17.步骤7:判断延误效益是否满足要求,如果满足按照相位初始控制时间实施信号控制;如果不满足要求,将相位初始控制时间减去1s后执行步骤6。
18.本发明与现有技术相比,其显著优点为:
19.本发明仅需部署感应设备在信号灯杆上,无需额外安装车载设备,与传统感应设备相比提高了检测精度及检测范围。同时,与交通流历史数据相比做到了数据实时性。根据实时数据预测公交车到站行程时间,采用晚点差值作为相位初始控制时间,极大程度优化公交车到站准点率;用非优先相位与优先相位的延误效益计算方法,保证了交叉口的整体通行效益;本发明可以实现秒级公交优先控制。
20.下面结合附图对本发明做进一步详细的描述。
附图说明
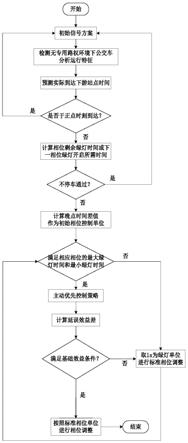
21.图1为无专用路权环境下公交准点率优化感应式控制流程图。
22.图2为无专用路权环境下交叉口示意图。
具体实施方式
23.一种无专用路权环境下公交准点率优化感应式控制方法,具体步骤为:
24.步骤1:利用交叉口灯杆上的感应装置获取无专用路权道路上的社会车辆及公交车辆信息,得到车辆长度、坐标位置、排队车辆长度、速度、到达率。
25.感应装置需安装距进口道停止线70m处的信号灯杆上,默认公交车辆车长与社会车辆车长分别为7m和4.5m,根据检测到的车辆长度判断车辆类型,将交叉口一个信号周期内对应进口道检测到的第一辆公交车作为目标。通过获得目标公交的横坐标、纵坐标数据,得到目标公交所处车道及对应相位。记录目标公交前方的排队车辆长度,获取目标公交到停止线的距离。
26.步骤2:确定目标公交车在无专用路权进口道处的运行状态;
27.由于交叉口信号灯因相位切换,导致公交车产生“不停车通行”和“停车等待”两种运行特征。其中,“不停车通行”可分为正常通行和排队通行,“停车等待”可分为无排队等待和排队等待。具体分析如下:
28.正常通行:公交车辆驶离上游站点并进入检测范围,公交车前方无排队车辆可在本相位绿灯结束前匀速通过交叉口。
29.无排队等待:公交车辆驶离上游站点并进入检测范围,公交车前方无排队车辆,行驶至停止线处本相位绿灯已结束,公交车需停车等待至下一次绿灯启亮后通过交叉口。
30.排队通行:公交车辆驶离上游站点并进入检测范围,进口道处存在累计到达的排队车辆,公交车驶入队尾,在本相位绿灯结束前随车队缓慢通过交叉口。
31.排队等待:公交车辆驶离上游站点并进入检测范围,进口道处存在累计到达的排队车辆,公交车驶入队尾时需停车等待下一次绿灯启亮后通过交叉口。
32.步骤3:预测不同运行状态下目标公交车上下游站间行程时间;
33.公交车上下游站间行程时间定义为从上游站点n
i
行驶至下游站点n
i 1
的所需时间。则:
34.公交车正常通行时上下游站间行程时间计算公式为:
[0035][0036]
其中,为n
i
加速启动至交叉口所耗时间;为两站间匀速段;为交叉口至站点n
i 1
减速段。
[0037]
公交车无排队等待时行程时间计算公式为:
[0038][0039]
其中,为从匀速状态减速停至交叉口所耗时间;t
w
为公交车在停止线处等待时间,为公交车被检测驶离停止线时刻与公交车被检测抵达停止线时刻的时刻差;为公交车在停止线处启动加速行驶至匀速时间。
[0040]
公交车排队通行时行程时间计算公式为:
[0041][0042]
公交车在此状态下存在前方排队车辆消散过程,其消散时间计算公式为:
[0043]
t
q
=n
×
t
q
ꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0044]
其中,n为公交车前方排队车辆数;t
q
为排队车辆平均消散时间。
[0045]
公交车排队等待时行程时间计算公式为:
[0046][0047]
步骤4:判断公交车正晚点状态,计算公交车相位初始控制时间;
[0048]
公交车在上游行驶时的交叉口相位将分为以下两种情况:
[0049]
绿时相位:当驶入进口道处所在相位为绿灯时,原始行驶状态为排队通行或者排队等待通过,即受到前方排队车辆干扰导致的晚点。控制前,公交车存在排队减速、排队停车的状态,因此实际—计划站间行程时间差包含公交车启动、制动所耗时间及相位延长时间。
[0050][0051][0052]
其中,分别为公交车排队通行和排队等待的计划准点行程时间;分别为公交车排队通行和排队等待控制前后实际与计划站间行程时间差;τ为公交车驶入队尾时速度判断系数,τ∈n(0,1),需要减速,τ=1;g
k
为初始绿灯延长时间。
[0053]
红时相位:当驶入进口道处所在相位为红灯时,原始行驶状态为无排队等待、排队等待。无排队等待时,公交车停在停车线,此时只需进行红灯早断即可,车辆启动需消耗时间。排队等待时,则需提早启亮绿灯。
[0054][0055][0056]
其中,分别为公交车无排队等待和排队等待控制前后实际与计划站间行程时间差;分别为公交车无排队等待时的计划准点行程时间;r
k
为初始红灯早断时间。
[0057]
步骤5:将计算得到的相位初始控制时间用于绿时相位和红时相位时长的初步调整,控制交叉口晚点公交车优先通行。
[0058]
步骤6:计算初步调整红绿灯时长后公交优先相位与非公交优先相位的正负延误效益变化。
[0059]
交叉口优先相位和非优先相位的车辆延误e计算公式为:
[0060][0061]
其中,λ(t)为停车线累计到达车辆函数,l(t)为车辆驶离函数,为方便计算延误,设t
i
(i=1,2...n)为排队车辆清散时间。排队延误为:
[0062][0063][0064]
其中,h为平均车头间距;v
p
为进口道车流启动波传播速度;a1启动加速度;a2为制动加速度;e
q
为排队延误。
[0065]
绿灯延长延误计算:假设k相位延长g
k
,即挪用非优先相位的对应的绿灯时长个单位,其优先与非优先车道上的延误发生变化。因实施绿灯延长,公交优先相位本应该滞留于进口道的社会车辆和公交车辆的等待时间减少一个红灯相位的时长,其延误减少,而下一非公交优先相位因被压缩绿灯时间,造成后方驶入进口道的车辆承担驶离延误。延误变化计算公式可表示为:
[0066][0067][0068][0069]
其中,δe
gdd
为绿灯延长后优先相位车辆减少的正延误;δe
gdi
为绿灯延长后非优
先相位车辆增加的负延误;为绿灯延长后减少的排队延误,r为原始相位红灯时间,δt为公交驶离停止线时间,t1为原始信号灯状态下排队车辆清散时间,t2为绿灯延长后排队车辆清散时间。
[0070]
红灯早断延误计算:假设k相位压缩r
k
,其优先与非优先车道上的延误发生变化,因优先相位的红灯时间提前缩短,公交优先相位的所有车辆延误减少,排队车辆提前驶入进口道,而上一非公交优先相位因被压缩绿灯时间,造成驶离车辆存在剩余,导致二次排队,驶离延误增加到下次红灯累计到达车辆数中。延误变化计算公式可表示为:
[0071][0072][0073][0074]
其中,δe
rdd
为红灯早断后优先相位车辆减少的正延误;δe
rdi
为红灯早断后非优先相位车辆增加的负延误;为红灯早断后减少的排队延误,t3为红灯早断后排队车辆清散时间。
[0075]
步骤7:判断延误效益是否满足要求,如果满足按照相位初始控制时间实施信号控制;如果不满足要求,将相位初始控制时间减去1s后执行步骤6。
[0076]
将因排队车辆和交叉口相位导致的晚点公交车列为优先目标。考虑到非优先相位车辆因压缩或相位调动受到影响,导致延误增加。如果忽视此问题,只顾及公交车的准点效益,不利于混合交通机制利益。将晚点时间差作为优先控制判断条件,准点率作为优化目标,交叉口车辆延误效益作为从属约束条件,保证交叉口及整个线路网的整体效益。
[0077]
即将满足晚点条件的公交车定为优先控制的目标车辆,利用优化条件对目标公交车到达下一站点的准点率进行判断,满足则调整相应红灯绿灯控制时间,执行红灯早断,绿灯延长。
[0078]
晚点条件:判定公交车为控制对象
[0079][0080]
优化条件:判定相位初始控制时间是否满足交叉口运行效益
[0081][0082]
其中,δe
dd
为实施公交优先控制策略后享受优先相位车辆减少的等待延误;δe
di
为实施优先控制后非优先相位车辆增加的等待延误;m为目标相位车道数。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

