1.本发明涉及停车诱导泊位预测技术领域,更具体地,涉及一种基于循环神经网络的停车场占有率预测方法。
背景技术:
2.随着中国经济社会的飞速发展,城市机动车的保有量不断增长,城市“停车难”的问题愈发突出。车辆停放常常遇到无法及时找到空车位、停车场出入口排队、车辆徘徊寻找车位的问题,车辆的乱停乱放现象严重,增加道路交通流量的同时也容易导致周边交通拥堵,会诱发一系列的社会治安问题,给社会经济、城市形象、人居环境带来极大的负面影响。
3.智能诱导停车是缓解停车难问题的有效手段。现有的智能诱导停车系统大多只能显示实时的停车位信息,这使得驾驶员到达停车场时,预先选中的停车位可能已经被占用,或者出现多辆车争抢少量停车位的现象,造成停车诱导失败。通过泊位预测,驾驶员可以在出发或到达之前确定是否存在有效停车位,从而能更好的规划行程,增加停车诱导的成功概率。
4.作为智能诱导停车的重要组成部分,国内外对停车泊位占有率预测已经进行了大量的研究,取得了一些研究成果。停车泊位占有率预测方法主要有基于统计学的预测方法和基于机器学习的预测方法,尤其是深度学习的方法大量应用于停车泊位预测中。
5.基于统计学的预测方法计算复杂度较小,但是预测的精度不高且稳定性不足。公开号为us7049979b2公开日:2006
‑
05
‑
23的美国专利提出的method and systemfor projecting dynamic parking availability based on an ongoing survey for remotelots with high demand,在停车场泊位预测系统中利用差分整合移动平均自回归模型(arima)进行泊位占有率预测,实验结果表明该模型的预测效果并不稳定,仅能在预测占有率相对平稳的时间段,在出现波峰或者波谷的时间段预测效果较差。
6.基于机器学习的方法预测精度较高,向荣.基于随机非平稳和长短时记忆网络的泊位混合预测.2019,这篇文章采用非平稳随机过程和lstm的混合模型进行预测,提高了预测的精度和稳定性。但该预测方法仅考虑了停车场占有率的时间维度的非线性变化特性,并没有考虑其中蕴含的周期性特征,也没有考虑外在因素的影响,比如:重大事件和节假日等。在不同类型停车场和不同时间段预测精度的稳定性不足。
技术实现要素:
7.本发明的目的在于提供一种稳定性和预测精度均较高的停车泊位预测方法。
8.本发明技术方案为:
9.一种基于循环神经网络的停车场占有率预测方法,所述方法包括以下步骤:
10.s1:获取停车场出入记录、停车场容量、停车场某一时刻停放车辆数,并且采集停车场的占有率影响因素数据;
11.s2:统计所述占有率影响因素数据,整理出表征相关因素对停车场占有率影响程
度的效应项序列h(t);
12.s3:统计停车场出入记录数据,整理出以单位时间为间隔的各个时刻停车场占有率变化的时间序列x(t);
13.s4:利用所述时间序列x(t)分析停车场占有率变化的周期性特征,通过傅里叶级数进行拟合得到周期项序列s(t);
14.s5:将前n个时刻的停车场占有率数据输入循环神经网络,提取停车场占有率变化的趋势特征,得到趋势项序列g(t);
15.s6:利用循环神经网络综合趋势项序列g(t)、周期项序列s(t)和效应项序列 h(t),预测得到下一时刻的停车场占有率的预测值y。
16.本技术方案对于停车场占有率数据分两层进行处理,第一层是基于时间序列特征分解的方法,提取和分析了停车场占有率数据的多方面特征,并考虑其它因素对停车场占有率的影响;第二层是利用循环神经网络将上述特征综合起来考虑,进行预测,本技术方案建立的预测模型结合时间序列特征分解法和神经网络,不仅考虑了时间维度的非线性特征,而且考虑了其中蕴含的周期性特征,以及外在因素的影响,相比于以往的基于统计学的预测方法、传统机器学习的方法以及单独的深度学习模型,考虑的特征更全面,预测精度的稳定性和准确性更高。
17.进一步地,步骤s1还包括对所述停车场出入记录数据中的时间记录错误和缺失部分进行修复、平滑,对重复的数据进行删除。
18.上述技术方案对错误、缺失和重复数据的处理,实现数据清洗。
19.进一步地,步骤s2中所述占有率影响因素包括:停车场收费标准、停车场管理制度、停车场所在区域发生的重大事件信息、节假日信息。
20.上述技术方案公开了四种占有率影响因素,使本发明预测方法可以综合考虑多种因素对停车场占有率的影响。
21.进一步地,步骤s2中所述效应项序列h(t)的生成包含如下步骤:
22.分析停车场占有率影响因素,包括停车场收费标准、停车场管理制度、重大事件信息、节假日信息,基于0
‑
1函数构造指示函数来表征该因素对停车场占有率的影响程度;指示函数形式如下:
23.h
i
(t)=k
i
·
δ
i
,
24.其中,h
i
(t)表示第i个因素对停车场占有率的影响,δ
i
是0
‑
1函数,i表示该因素产生影响的时刻;k
i
表示该因素对停车场占有率影响的程度,根据经验确定k
i
的大小;效应项序列h(t)由指示函数构造,由下式得到:
[0025][0026]
进一步地,步骤s3所述停车场占有率变化的时间序列x(t)生成步骤包括:
[0027]
s31:将停车场出入记录数据的时间以单位时间间隔分成一个序列的时间点;
[0028]
s32:以停车场某一时刻停放车辆数为基准,结合停车场出入记录数据,在所述基准上进行增减,获取每个序列的时间点的停车场停放车辆数,从而得到停车场停放车辆数变化的时间序列;
[0029]
s33:用停车场容量减去停车场停放车辆数,则得到停车场泊位数变化的时间序列;
[0030]
s34:用停车场泊位数除以停车场容量,则得到停车场占有率变化的时间序列x(t),t代表某个时刻,x(t)表示第t时刻的停车场占有率。
[0031]
上述技术方案时间序列中相邻时间点间隔时间的大小由实际应用所需的目标预测时间决定。
[0032]
进一步地,步骤s4所述周期项序列s(t)的生成步骤包括:
[0033]
统计分析停车场占有率的时间变化曲线,用傅里叶级数生成拟合的周期序列s(t),公式如下:
[0034][0035]
其中,c为常数,t为周期,通过观察占有率的时间变化曲线的周期时长计算得到,傅里叶级数的系数[a1,b1,...a
n
,b
n
]
t
按照服从均值为0的正态分布进行初始化,采用批量梯度下降法,来训练参数,进行拟合。
[0036]
进一步地,步骤s5所述趋势项序列g(t)的生成步骤包括:用前n个时刻的停车场占有率数据预测下一时刻的停车场占有率趋势预测值,即将 {i
‑
n,i
‑
n 1,
……
i
‑
2,i
‑
1,i}时刻的停车场占有率输入循环神经网络中,预测出i 1时刻的数据作为趋势预测值,将所述趋势预测值作为趋势项序列g(t)。
[0037]
进一步地,步骤s6所述的预测值y生成步骤包括:将趋势项序列g(t),周期项序列s(t),效应项序列h(t)作为循环神经网络的输入,得到下一个时刻的预测值y,即为最终的预测值。
[0038]
进一步地,步骤s5和s6所述循环神经网络为gru神经网络。
[0039]
进一步地,步骤s5和s6所述循环神经网络为lstm神经网络。
[0040]
与现有技术相比,本发明技术方案的有益效果是:
[0041]
本技术方案对于停车场占有率数据分两层进行处理,第一层是基于时间序列特征分解的方法,提取和分析了停车场占有率数据的多方面特征,并考虑其它因素对停车场占有率的影响;第二层是利用循环神经网络将上述特征综合起来考虑,进行预测,本技术方案建立的预测模型结合时间序列特征分解法和神经网络,不仅考虑了时间维度的非线性特征,而且考虑了其中蕴含的周期性特征,以及外在因素的影响,相比于以往的基于统计学的预测方法、传统机器学习的方法以及单独的深度学习模型,考虑的特征更全面,预测精度的稳定性和准确性更高。
附图说明
[0042]
图1是本发明整体流程图;
[0043]
图2是实施例2停车场占有率变化曲线;
[0044]
图3是本发明预测方法的预测模型;
具体实施方式
[0045]
为清楚地说明本发明一种基于循环神经网络的停车场占有率预测方法,结合实例
和附图对本发明作进一步说明,但不应以此限制本发明的保护范围。
[0046]
实施例1
[0047]
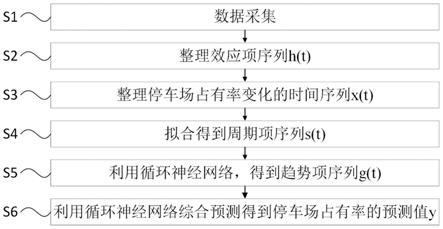
本实施例提供了一种基于循环神经网络的停车场占有率预测方法,用于对目标停车场的占有率进行预测,图1是基于循环神经网络的停车场占有率预测方法流程图;该方法包括以下步骤:
[0048]
s1:数据采集,具体为,获取停车场出入记录、停车场容量、停车场某一时刻停放车辆数,并且采集停车场的占有率影响因素数据;
[0049]
s2:整理效应项序列h(t),具体为,统计所述占有率影响因素数据,整理出表征相关因素对停车场占有率影响程度的效应项序列h(t);
[0050]
s3:整理停车场占有率变化的时间序列x(t),具体为,统计停车场出入记录数据,整理出以单位时间为间隔的各个时刻停车场占有率变化的时间序列x(t);
[0051]
s4:拟合得到周期项序列s(t),具体为,利用所述时间序列x(t)分析停车场占有率变化的周期性特征,通过傅里叶级数进行拟合得到周期项序列s(t);
[0052]
s5:利用循环神经网络,得到趋势项序列g(t),具体为,将前n个时刻的停车场占有率数据输入循环神经网络,提取停车场占有率变化的趋势特征,得到趋势项序列g(t);
[0053]
s6:利用循环神经网络综合预测得到停车场占有率的预测值y,具体为,利用循环神经网络综合趋势项序列g(t)、周期项序列s(t)和效应项序列h(t),预测得到下一时刻的停车场占有率的预测值y。
[0054]
本实施例中,步骤s4在步骤s3执行完毕后再执行,步骤s2、s3、s5的执行顺序不分先后。
[0055]
本实施例对于停车场占有率数据分两层进行处理,第一层是基于时间序列特征分解的方法,提取和分析了停车场占有率数据的多方面特征,并考虑其它因素对停车场占有率的影响;第二层是利用循环神经网络将上述特征综合起来考虑,进行预测,本技术方案建立的预测模型结合时间序列特征分解法和神经网络,不仅考虑了时间维度的非线性特征,而且考虑了其中蕴含的周期性特征,以及外在因素的影响,相比于以往的基于统计学的预测方法、传统机器学习的方法以及单独的深度学习模型,考虑的特征更全面,预测精度的稳定性和准确性更高。
[0056]
实施例2
[0057]
本实施例提供了一种基于时间序列特征分解和循环神经网络的停车场占有率预测方法,用于对目标停车场的占有率进行预测,图1是基于循环神经网络的停车场占有率预测方法流程图;该方法包括以下步骤:
[0058]
步骤s1:数据采集与清洗,具体为:
[0059]
本实施例以广州市天河区一家医院的配建停车场为例,采集了该停车场2018 年6月的出入口进出记录信息,该目标停车场在6月1日零时的停车数量为30,医院停车场容量为408,即该停车场有408个泊车位。为了简单起见,在本实施例中不考虑停车场收费标准和停车场管理制度的影响,仅考虑节假日和重大事件的影响。因此,收集了2018年6月的节假日信息,收集了2018年6月与该停车场有关的重大事件信息,包括该医院的重要活动或者医院附近的重大社会事件。对停车场出入记录数据中的时间记录错误和缺失部分,进行修复、平滑,重复的进行删除。
[0060]
步骤s2:整理效应项序列h(t),具体为:
[0061]
本实施例仅考虑节假日和重大事件两个因素对停车场占有率变化的影响。表征节假日对停车场占有率影响程度的指示函数如下:
[0062][0063]
表征重大事件对停车场占有率影响程度的指示函数如下:
[0064][0065]
则,表征外界相关因素影响的效应项序列h(t)由指示函数叠加得到:
[0066]
h(t)=h1(t) h2(t)
[0067]
步骤s3:整理停车场占有率变化的时间序列x(t),具体为:
[0068]
本实施例以5分钟为间隔进行停车场占有率变化的统计。以6月1日零时为初始时刻,此时停车场停车数量为30,根据停车记录,每进来一辆车则停车数量加1,每出去一辆车则停车数量减1,如此推算,可以得到5分钟后的停车数量,再除以停车场容量408,即可得到5分钟后的停车场占有率。用同样的方式,依次可以得到每隔5分钟的停车场占有率序列,即为占有率变化的时间序列x(t)。
[0069]
在本发明其他实施例中,时间序列中相邻时间点间隔时间的大小由实际应用所需的目标预测时间决定。
[0070]
步骤s4:拟合得到周期项序列s(t),具体为:
[0071]
从停车场占有率变化的时间序列x(t)的变化曲线上可以看出停车场占有率变化的周期性特征。如图2所示,从目标停车场的整个6月份的停车场占有率变化曲线来看,工作日和周末的停车场占有率变化有明显的区别,并且有显著的周期性特征,以一星期为周期时间。因此,该目标停车场的周期时间为7天,以5分钟为单位间隔,即一个周期时间中共有7*24*(60/5)=2016个时刻,则下式周期t为2016。
[0072]
用傅里叶级数生成拟合的周期序列s(t),公式如下:
[0073][0074]
其中,c取值0,t为周期,具体为周期时间中的时刻数,通过观察占有率的时间变化曲线的周期时长计算得到,其值为2016,傅里叶级数的系数 [a1,b1,...a
n
,b
n
]
t
按照服从均值为0的正态分布进行初始化,并采用批量梯度下降法,来训练参数,进行拟合。
[0075]
步骤s5:利用循环神经网络,得到趋势项序列g(t),具体为:
[0076]
本实施例中采用gru来进行趋势项预测。取前4个时刻的数据作为参考数据,输入gru神经网络中,得到下一时刻的预测数据,该预测数据即为g(t)。
[0077]
步骤s6:利用循环神经网络综合预测得到停车场占有率的预测值y,具体为:
[0078]
本实施例中采用gru来进行最终的预测。预测模型如图3所示,将趋势项 g(t)、周期项s(t)和效应项h(t)作为输入数据,输入gru神经网络中,得到最终的预测值y。在本发明其他实施例中还可采用lstm神经网络替换上述步骤中的 gru神经网络。
[0079]
6月份共有30天,本实施例取前24天的数据用来训练,最后6天的数据用来测试。以
平均绝对误差百分比作为评价指标,将该本发明的方法tsfd
‑
gru 与gru和bigru进行对比,结果如下:
[0080][0081][0082]
从表中可以看出,本发明提出的方法tsfd
‑
gru的平均绝对误差百分比小于单独的gru和bigru神经网络,说明其预测精度要优于gru和bigru,证明了该发明方法的有效性。
[0083]
本实施例对于停车场占有率数据分两层进行处理,第一层是基于时间序列特征分解的方法,提取和分析了停车场占有率数据的多方面特征,并考虑其它因素对停车场占有率的影响;第二层是利用循环神经网络将上述特征综合起来考虑,进行预测,本技术方案建立的预测模型结合时间序列特征分解法和神经网络,不仅考虑了时间维度的非线性特征,而且考虑了其中蕴含的周期性特征,以及外在因素的影响,相比于以往的基于统计学的预测方法、传统机器学习的方法以及单独的深度学习模型,考虑的特征更全面,预测精度的稳定性和准确性更高。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

