1.本发明涉及驾驶辅助装置。
背景技术:
2.以往,作为交通事故发生的原因,明确了是发现危险的状态的时间晚,同时驾驶员的判断的失误的要素也大。虽然驾驶员是否能够作出恰当的判断取决于驾驶员的技术,但是近年来,为了不管驾驶员的技术如何都使车辆恰当地行驶,驾驶辅助装置被实用化。例如,在专利文献1中,公开有这样的驾驶辅助装置,即该驾驶辅助装置根据使用相机或雷达等检测出的人物和/或其它车辆等对象物与本车辆的移动来评价彼此的位置关系,并且预测碰撞或者交错而进行警告和/或对行驶控制的干预。该驾驶辅助装置基于对象物的位置和预测前进道路来判定本车辆与对象物之间的碰撞危险性,并在碰撞危险性高的情况下进行用于避免碰撞的驾驶辅助。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2014
‑
191597号公报
技术实现要素:
6.技术问题
7.但是,在某种交通状况下存在多个对象物时,由于在分别基于各个位置关系而预测的碰撞或交错的准确度变得确定之后执行警告或对行驶控制的干预,所以有可能妨碍顺畅的行驶。
8.本发明是鉴于上述问题而完成的,本发明的目的在于提供即使在存在多个对象物的情况下,也能够在不妨碍顺畅的行驶的情况下执行警告或对行驶控制的干预动作的驾驶辅助装置。
9.技术方案
10.为了解决上述问题,根据本发明的某观点,提供驾驶辅助装置,其具备:危险预测部,其基于车辆的行驶状态的信息以及车辆的周围环境的信息而预测车辆的危险状态;驾驶辅助控制部,其基于预测出的危险状态执行驾驶辅助控制;失误检测部,其取得乘车人的生物信息,并基于生物信息检测乘车人感到危险这一情况;以及失误数据存储部,其存储失误学习模型,该失误学习模型累积乘车人感到危险时的车辆的行驶状态的信息以及车辆的周围环境的信息而得,驾驶辅助控制部基于预测出的危险状态、以及乘车人感到危险时的车辆的行驶状态的信息和车辆的周围环境的信息,执行驾驶辅助控制。
11.另外,还可以具备驾驶倾向数据存储部,其累积执行驾驶辅助控制时的车辆的驾驶员的驾驶操作的倾向的数据,驾驶辅助控制部还基于驾驶员的驾驶操作的倾向的数据而执行驾驶辅助控制。
12.另外,驾驶倾向数据存储部可以累积乘车人感到危险的频率、感到危险时的驾驶
操作、感到危险时的危险度或驾驶员的驾驶技术之中的至少一种数据作为驾驶员的驾驶操作的倾向,驾驶辅助控制部可以基于该数据而设定驾驶辅助控制的内容。
13.另外,驾驶辅助控制部也可以基于驾驶员的驾驶操作的倾向的数据而设定驾驶辅助控制的执行时期。
14.另外,驾驶辅助控制部也可以基于从预测出危险状态时开始的经过时间而设定驾驶辅助控制的内容。
15.另外,驾驶辅助控制部也可以基于驾驶员的集中力或清醒程度而设定驾驶辅助控制的内容。
16.技术效果
17.如以上所说明,根据本发明,即使在存在多个对象物的情况下,也能够在不妨碍顺畅的行驶的情况下执行警告或对行驶控制的干预动作。
附图说明
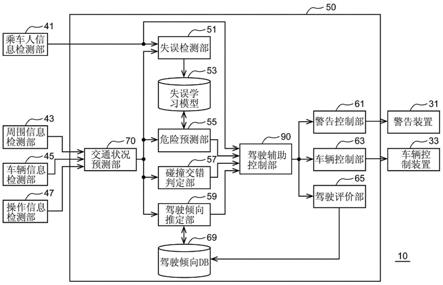
18.图1是表示本发明的实施方式的驾驶辅助装置的构成例的框图。
19.图2是表示交通状况预测部的具体的功能构成的框图。
20.图3是表示驾驶辅助控制部的具体的功能构成的框图。
21.图4是表示车辆的碰撞事例的说明图。
22.图5是表示警告和车辆控制的设定例的说明图。
23.图6是表示警告和车辆控制的其它的设定例的说明图。
24.图7是表示警告和车辆控制的进一步其它的设定例的说明图。
25.图8是表示车辆的其它的碰撞事例的说明图。
26.图9是表示车辆的接触事例的说明图。
27.图10是表示该实施方式的驾驶辅助装置的动作例的流程图。
28.图11是表示交通状况预测处理的流程图。
29.图12是表示驾驶辅助控制处理的流程图。
30.符号说明
31.10
…
驾驶辅助装置
32.50
…
电子控制装置
33.51
…
失误检测部
34.53
…
失误学习模型
35.55
…
危险预测部
36.57
…
碰撞交错判定部
37.59
…
驾驶倾向推定部
38.61
…
警告控制部
39.63
…
车辆控制部
40.65
…
驾驶评价部
41.69
…
驾驶倾向数据库
42.70
…
交通状况预测部
43.71
…
交通环境识别部
44.73
…
交通参与者提取部
45.75
…
交通参与者行为推定部
46.77
…
本车辆行为预测部
47.79
…
行为学习模型
48.81
…
交通状况理解预测部
49.90
…
驾驶辅助控制部
50.91
…
危险度评价部
51.93
…
危险度评价语言化处理部
52.95
…
警告、控制执行判定部
具体实施方式
53.以下,边参照附图,边关于本发明的优选的实施方式详细地进行说明。应予说明,在本说明书和附图中,关于实质上具有相同的功能构成的构成要素,通过标注相同的符号而省略其重复说明。
54.<1.驾驶辅助装置的构成例>
55.首先,说明本发明的实施方式的驾驶辅助装置的构成例。图1是表示本实施方式的驾驶辅助装置10的构成例的框图。
56.驾驶辅助装置10搭载于车辆,构成为检测车辆的乘车人、车辆的行驶状态和操作状态、以及车辆的周围环境的信息,并且使用检测出的各种信息执行辅助车辆的驾驶的控制。驾驶辅助装置10具备:乘车人信息检测部41、周围信息检测部43、车辆信息检测部45、操作信息检测部47、电子控制装置50、警告装置31以及车辆控制装置33。
57.(1
‑
1.乘车人信息检测部)
58.乘车人信息检测部41检测车辆的驾驶员和/或同乘者等乘车人的信息。乘车人信息检测部41包括一个或多个检测用于推定乘车人的情绪和/或感受的信息的检测设备。电子控制装置50构成为能够取得由乘车人信息检测部41检测出的信息。
59.乘车人信息检测部41可以包含下述中的至少一种:例如用于基于拍摄图像而检测乘车人的心跳和/或体温等的相机、用于检测乘车人的心跳的电波式多普勒传感器、用于检测乘车人的脉搏的非佩戴式的脉搏传感器、为了测量驾驶员的心跳或心电图而埋设于方向盘的电极、为了测量在乘车人落座于座位的期间的座压分布而埋设于驾驶座的座位的压力测量器、为了测量乘车人的心跳或呼吸而检测安全带的位置的变化的设备、用于检测乘车人的位置(生物位置)的信息的tof(time of flight:飞行时间)传感器、或者用于测量乘车人的皮肤的表面温度的热像仪。另外,乘车人信息检测部41也可以是乘车人所佩戴而检测乘车人的生物信息的可穿戴设备等佩戴式的检测器。
60.(1
‑
2.周围信息检测部)
61.周围信息检测部43检测车辆的周围环境的信息。周围信息检测部43检测存在于车辆的周围的人物、其它车辆、自行车、其它的障碍物等作为车辆的周围环境的信息。电子控制装置50构成为能够取得由周围信息检测部43检测出的信息。周围信息检测部43包含例如拍摄车辆的周围的相机、检测车辆的周围的物体的雷达、检测与车辆的周围的物体之间的距离和/或方位等的ridar等检测器之中的至少一种。另外,周围信息检测部43也可以包含
从车车间通信或路车间通信等车辆的外部的装置取得信息的通信装置。进而,周围信息检测部43也可以包含检测与路面摩擦相关的信息的检测器。
62.(1
‑
3.车辆信息检测部)
63.车辆信息检测部45检测车辆的行驶状态的信息。车辆信息检测部45检测车速、加速度、横摆率等车辆的行驶状态的信息。电子控制装置50构成为能够取得由车辆信息检测部45检测出的信息。车辆信息检测部45也可以包含例如车速传感器、加速度传感器、角速度传感器之中的至少一种。
64.(1
‑
4.操作信息检测部)
65.操作信息检测部47检测车辆的驾驶操作状态的信息。操作信息检测部47检测加速操作量、制动操作量、方向盘转向角等车辆的驾驶操作状态的信息。电子控制装置50构成为能够取得由操作信息检测部47检测出的信息。操作信息检测部47也可以包含例如加速器位置传感器、制动行程传感器、转向角传感器之中的至少一种。
66.(1
‑
5.警告装置)
67.警告装置31由电子控制装置50控制而进行作为驾驶辅助控制之一的警告动作。例如,警告装置31可以是显示警告显示的显示装置,也可以是发出警告音或警告语音的扬声器,还可以是通过发光而进行警告的警告灯。显示装置可以是例如设置于控制板的显示面板或投影于前车窗的hud(head up display:平视显示器),另外,可以是仪表板内的仪表显示设备,也可以是导航系统的显示装置,还可以是提示各种信息的多功能显示器。
68.(1
‑
6.车辆控制装置)
69.车辆控制装置33由电子控制装置50控制而进行作为驾驶辅助控制之一的自动驾驶控制。车辆控制装置33包含一个或多个执行车辆的行驶控制的控制装置,例如,车辆控制装置33包含有控制动力传递机构、转向系统、制动系统等的驱动的控制装置,所述动力传递机构包含发动机、一个或多个驱动用马达和变速器。基本上,车辆控制装置33基于驾驶员的驾驶操作而执行车辆的行驶控制。另外,车辆控制装置33接受来自电子控制装置50的指示而执行驾驶辅助控制。
70.(1
‑
7.电子控制装置)
71.电子控制装置50构成为具备例如cpu(central processing unit:中央处理单元)或mpu(micro processing unit:微处理单元)等运算处理装置、ram(random access memory:随机存取存储器)或rom(read only memory:只读存储器)等存储元件。运算处理装置通过执行存储于存储元件的程序来执行各种运算处理。也可以与存储元件一起具备或者取代存储元件而具备hdd(hard disk drive:硬盘驱动器)、cd(compact disc:光盘)、dvd(digital versatile disc:数字多功能光盘)、ssd(solid state disc:固态盘)、usb(universal serial bus:通用串行总线)闪存、存储装置等存储介质。应予说明,电子控制装置50的一部分或全部可以由固件等能够更新的设备构成,另外,也可以是根据来自cpu等的指示而执行的程序模块等。
72.电子控制装置50直接地、或者介由can(controller area network:控制器局域网)或lin(local inter
‑
net:局域网)等通信线路来与乘车人信息检测部41、周围信息检测部43、车辆信息检测部45、操作信息检测部47、警告装置31以及车辆控制装置33连接。
73.在本实施方式中,电子控制装置50具备:交通状况预测部70、失误检测部51、危险
预测部55、碰撞交错判定部57、驾驶倾向推定部59、驾驶辅助控制部90、警告控制部61、车辆控制部63以及驾驶评价部65。这各部是通过由运算处理装置执行程序而实现的功能。
74.(1
‑7‑
1.交通状况预测部)
75.交通状况预测部70基于从周围信息检测部43、车辆信息检测部45和操作信息检测部47发送的信息,来预测车辆所处的交通状况。即,交通状况预测部70至少根据本车辆的行驶状态以及操作状态、本车辆的周围的交通环境以及交通参与者的状态,来预测本车辆所处的交通状况。
76.图2是表示交通状况预测部70的具体的功能构成的框图。交通状况预测部70具备:交通环境识别部71、交通参与者提取部73、交通参与者行为推定部75、本车辆行为预测部77以及交通状况理解预测部81。另外,交通状况预测部70构成为能够参照行为学习模型79。
77.交通环境识别部71基于从周围信息检测部43发送的信息,来求取车辆的周围的交通环境的信息。具体地,交通环境识别部71通过对由相机得到的拍摄图像进行图像处理、进行使用了雷达和/或ridar等的检测数据的运算处理,来识别本车辆的周围的交通信号机、交通标识、道路上的白线、建筑物、护栏以及路缘石等障碍物等。另外,交通环境识别部71也可以求取识别出的对象物的大小和/或距对象物的距离、与对象物之间的相对速度等信息。进而,交通环境识别部71也可以求取交通信号机的颜色的信息。
78.交通参与者提取部73基于从周围信息检测部43发送的信息,来提取车辆的周围的交通参与者。具体地,交通参与者提取部73提取本车辆的周围的其它车辆、自行车和行人等多个交通参与者。另外,交通参与者提取部73也可以求取距提取出的交通参与者的距离和/或与交通参与者之间的相对速度等信息。
79.交通参与者行为推定部75推定由交通参与者提取部73提取出的交通参与者的行为。具体地,交通参与者行为推定部75将由交通参与者提取部73提取出的交通参与者的信息输入到行为学习模型79,并基于来自行为学习模型79的输出而推定每一个交通参与者的此后的行为。由此,推定交通参与者将做怎样的动作。行为学习模型79是例如在各种的交通状况下,学习其它车辆、自行车、行人等交通参与者的行为而成的学习模型,并且预先存储到存储元件或者存储介质。在该情况下,存储元件或者存储介质具有作为行为数据存储部的功能。该行为学习模型79也可以使用交通状况预测部70所取得的信息而依次更新。
80.本车辆行为预测部77基于从车辆信息检测部45和操作信息检测部47发送的信息,来预测本车辆的行为。具体地,本车辆行为预测部77根据由车辆信息检测部45检测出的当前的车辆的行驶状态和由操作信息检测部47检测出的车辆的驾驶操作状态,来预测本车辆的行为。
81.交通状况理解预测部81基于由交通环境识别部71、交通参与者行为推定部75和本车辆行为预测部77分别求取得到的信息,来理解本车辆所处的当前的交通状况,并且预测此后本车辆所处的交通状况。具体地,交通状况理解预测部81针对本车辆的周围的交通环境,将交通参与者的行为和本车辆的行为考虑进来,来理解并预测本车辆的交通状况。这样,交通状况预测部70预测本车辆所处的交通状况。
82.(1
‑7‑
2.碰撞交错判定部)
83.碰撞交错判定部57基于由交通状况预测部70预测出的本车辆的当前的交通状况的信息,来判定是否会发生本车辆与其它的交通参与者的碰撞或者交错。碰撞交错判定部
57基于当前的交通环境、预测的交通参与者的行为和预测的本车辆的行为,来判定交通参与者的行为计划的轨迹与本车辆的行为计划的轨迹是否会交错,进行基于所谓的物理模型的碰撞等的判定。由碰撞交错判定部57进行的本车辆与其他的交通参与者之间的碰撞等的判定以不考虑驾驶员个人的技术要素的判定结果为主。
84.(1
‑7‑
3.失误检测部)
85.失误检测部51基于从乘车人信息检测部41发送的信息,检测乘车人感到危险的状态即失误。具体地,失误检测部51基于由乘车人信息检测部41检测出的乘车人的面部的表情、面部朝向、视线、脉搏或心跳、血压、心电等的变化而检测失误。
86.例如在基于面部朝向和视线的信息而检测出乘车人目视着车外这一情况的状态下,在脉搏或心跳、血压、心电等产生了急剧的变化的情况下,失误检测部51检测出失误。由此,能够提高处于乘车人对车外的交通状况感到危险的状态的准确度。进而也可以在基于面部朝向和视线的信息而检测出乘车人斜视之后,检测出从斜视的状态之后恢复到端正的视线的状态这一情况时,在脉搏或心跳、血压、心电等产生了急剧的变化的情况下,失误检测部51检测出失误。判定为乘车人感到危险的脉搏或心跳、血压、心电等的变化速度的阈值能够预先设定为恰当的值。也可以与脉搏或心跳、血压、心电等的变化速度相应地将失误的等级进行分类。但是,失误的检测方法并不限于上述的例子。
87.失误检测部51取得由交通状况预测部70预测出的本车辆的当前的交通状况的信息,累积检测出失误时的本车辆的交通状况的信息,并使失误学习模型53依次学习。失误学习模型53是学习了检测出失误时的交通状况的数据、即乘车人感到危险的交通状况的数据而得的学习模型。作为构建失误学习模型53的数理模型,能够使用例如基于标签或教师数据而将输入的数据进行分类的分类器、支持向量机、邻近法、深度学习等神经网络或贝叶斯网络等公知的模型。失误学习模型53存储于存储元件或者存储介质。在该情况下,存储元件或者存储介质具有作为失误数据存储部的功能。
88.应予说明,“失误”指认知到虽然未引起重大的灾害或事故,但是也距直接导致重大的灾害或事故仅一步之遥的事态的状态。检测失误的对象乘车人并不限于驾驶员,也可以包含同乘者。
89.(1
‑7‑
4.危险预测部)
90.危险预测部55使用累积、学习数据而得的失误学习模型53,并基于由交通状况预测部70预测出的交通状况来预测本车辆的危险状态。即,危险预测部55具有下述的功能:使用学习了车辆的乘车人感到危险的过去的交通状况的事例的失误学习模型53,来预测在当前的交通状况下危险是否逼近。
91.具体地,危险预测部55向失误学习模型53输入车辆的驾驶状态的信息和周围环境的信息的数据,并基于输出的失误的状态,来预测本车辆的危险状态。在来自失误学习模型53的输出表示过去检测出失误的情况下,危险预测部55预测为预测的交通状况对于本车辆而言是危险的状态。也可以在失误学习模型53正在学习失误的等级的数据的情况下,基于失误的等级而预测对于本车辆而言的危险等级。
92.作为设为输入数据的车辆的驾驶状态的信息,优选包含车辆的前后、左右和上下各个方向的加速度、横摆角、纵倾角以及侧倾角各自的角速度、车速、转向角的数据。进而,也可以包含发动机转速和方向指示器输出等信息作为车辆的驾驶状态的信息。另外,作为
设为输入数据的周围环境的信息,优选包含本车辆的行驶车道、与其它车辆和/或行人等交通参与者相关的相对距离、相对速度和前进方向、以及行驶过程中的道路的行车道数量和信号机信息的数据。进而,也可以包含天气和路面状态等的信息作为周围环境的信息。
93.相对于上述的碰撞交错判定部57基于物理模型而判定碰撞等的发生,危险预测部55基于车辆的乘车人实际地感到危险的过去的事例而根据当前的交通状况客观地预测车辆的危险状态。由此,能够识别如下情况:在碰撞交错判定部57中判定为将发生碰撞等的准确度低的时刻之后,如果车辆保持原样行驶则发生碰撞等的可能性高。
94.(1
‑7‑
5.驾驶倾向推定部)
95.驾驶倾向推定部59基于由交通状况预测部70预测出的本车辆的当前的交通状况的信息,推定驾驶员在当前的本车辆所处的交通状况下的驾驶倾向。具体地,驾驶倾向推定部59参照累积而得的驾驶倾向数据库(db)69,推定在当前的交通状况下驾驶员过去感到危险的频率、该驾驶员对驾驶辅助控制的依赖度等。驾驶倾向数据库69是将检测出驾驶员过去感到危险的状态的交通状况、当时的危险度、另外执行了驾驶辅助控制的情况下的驾驶员的实际的驾驶操作的信息作为驾驶员个人的信息累积而得的数据库,并存储于存储元件或者存储介质。在该情况下,存储元件或者存储介质具有作为驾驶倾向数据存储部的功能。驾驶倾向数据库69也可以包含驾驶员个人的驾驶技术的信息。通过将推定驾驶员个人的驾驶倾向而得的结果用于驾驶辅助控制,能够根据驾驶员的驾驶倾向而改变驾驶辅助控制的干预程度。
96.(1
‑7‑
6.驾驶辅助控制部)
97.驾驶辅助控制部90基于从乘车人信息检测部41发送的信息以及由危险预测部55、碰撞交错判定部57和驾驶倾向推定部59求取而得的信息,来执行预定的驾驶辅助控制。在本实施方式中,驾驶辅助控制部90算出警告控制部61和车辆控制部63的操作指示的信息。
98.图3是表示驾驶辅助控制部90的具体的功能构成的框图。驾驶辅助控制部90具备:危险度评价部91、危险度评价语言化处理部93以及警告、控制执行判定部95。
99.危险度评价部91以由碰撞交错判定部57基于物理模型而得的危险状态的预测结果以及由危险预测部55基于失误学习模型而得的危险状态的预测结果为基础,综合地评价本车辆的危险度。例如,危险度评价部91可以将由碰撞交错判定部57得到的危险状态的预测结果和由危险预测部55得到的危险状态的预测结果数值化为危险状态的准确度,并且将其中大的一方的值设为危险度。或者,危险度评价部91也可以将由碰撞交错判定部57得到的危险状态的预测结果和由危险预测部55得到的危险状态的预测结果数值化为危险状态的准确度,并且将其合计值设为危险度。
100.危险度评价部91在评价危险度时,可以分别对由碰撞交错判定部57得到的危险状态的预测结果和由危险预测部55得到的危险状态的预测结果进行加权。另外,危险度评价部91可以与预测的危险状态相应地对危险度进行加权。例如,可以根据车辆彼此是否碰撞、车辆与行人或自行车是否碰撞、正面碰撞还是轻度的接触、或者本车辆与碰撞对方之间的相对速度等,对危险度进行加权。
101.危险度评价语言化处理部93进行用于对包含驾驶员在内的乘车人进行警告的语言化处理。例如,危险度评价语言化处理部93根据危险度的评价结果,将处于怎样的危险状态、应该注意的对象是什么、应该注意哪个方向等信息进行语言化。将语言化而得的信息发
送到警告控制部61,用于基于语音实现的警告动作和/或基于显示实现的警告动作。
102.警告、控制执行判定部95基于危险度的评价结果,判定是否需要执行警告控制部61和车辆控制部63的控制。在本实施方式中,警告、控制执行判定部95基于从预测出车辆1的碰撞等危险状态时开始的经过时间,使警告或车辆控制的干预动作的设定内容不同。具体地,以下述方式判定是否需要执行控制:在预测出车辆1的碰撞等的初期阶段中设定为仅执行警告,并且随着由驾驶员作出的判断的滞后的进展度变大,对车辆控制的干预程度变大。另外,在本实施方式中,警告、控制执行判定部95根据驾驶员的驾驶倾向使警告或车辆控制的干预动作的设定内容不同。具体地,以下述方式判定是否需要执行控制:驾驶员的驾驶技术越低,或者其对驾驶辅助控制的依赖度越高,则对车辆控制的干预程度越大。或者,以下述方式判定是否需要执行控制:驾驶员的驾驶技术越低,或者其对驾驶辅助控制的依赖度越高,则驾驶辅助控制的执行时期越早。
103.在危险度比较低的情况下,或者在推定为由碰撞引起的损失小的情况下,警告、控制执行判定部95可以判定为不执行对车辆控制的干预而仅执行警告控制。另一方面,在危险度高的情况下,或者在判定为由碰撞引起的损失大的情况下,警告、控制执行判定部95可以判定为一并执行警告控制以及对车辆控制的干预。
104.(1
‑7‑
7.警告控制部)
105.警告控制部61基于由警告、控制执行判定部95得到的判定结果,生成警告装置31的控制信号。在使警告装置31执行警告动作的情况下,警告控制部61生成用于使警告装置31进行预定的警告动作的控制信号,并向警告装置31输出该控制信号。由此,能够对驾驶员提示避免车辆1的危险状态的驾驶操作,从而能够避免车辆1的碰撞等危险状态,另外能够减少损失。在通过语音或文本显示进行警告动作的情况下,警告控制部61向警告装置31输出由危险度评价语言化处理部93生成的语言化了的信息。由此,警告装置31能够进行基于语音或文本显示实现的警告动作。
106.(1
‑7‑
8.车辆控制部)
107.车辆控制部63基于由警告、控制执行判定部95得到的判定结果,生成车辆控制装置33的控制信号。在预测出车辆的碰撞等危险状态的情况下,车辆控制部63将车辆的一部分或全部自动驾驶化而避免危险状态,或者使损失减少。例如,车辆控制部63生成用于使车辆减速、进行紧急制动、进行转弯的控制信号,并向车辆控制装置33输出该控制信号。由此,车辆1进行避免碰撞的动作,能够避免车辆1的碰撞等危险状态,另外能够减少损失。
108.(1
‑7‑
9.驾驶评价部)
109.驾驶评价部65评价在执行了驾驶辅助控制时的驾驶员个人的驾驶倾向。例如,驾驶评价部65将预测出的车辆1的危险状态和危险度的信息、交通状况的信息、实际地进行了的驾驶操作的信息累积于驾驶倾向数据库69。预测出的车辆1的危险状态和危险度的信息越多,则推定为处于驾驶员的驾驶技术越低的倾向。驾驶倾向数据库69也可以包含驾驶员个人的驾驶技术的信息。另外,驾驶员对于车辆1的危险状态和危险度的信息,越在早期阶段进行减速或停止动作并避免危险状态,则推定为处于对驾驶辅助控制的依赖度越高的倾向。另外,驾驶评价部65也可以伴随着驾驶辅助控制的执行,使能够评价驾驶员的驾驶倾向的各种信息累积于驾驶倾向数据库69。
110.<2.驾驶辅助装置的动作例>
111.至此,说明了本实施方式的驾驶辅助装置的构成例。接着,使用车辆与自行车或者其它车辆碰撞的事例,来说明本实施方式的驾驶辅助装置的动作例。
112.图4表示在交叉路口向右转弯的车辆1碰撞到从对向车辆x的阴影中出现而穿过右转弯目标道路的人行横道的自行车3的事例。图5表示基于判断的滞后的进展度和驾驶员的驾驶倾向由驾驶辅助装置10执行的警告以及车辆控制的设定例。
113.车辆a1、a2、a3分别表示碰撞之前的某时刻的车辆1的位置,自行车b1、b2、b3分别表示与车辆a1、a2、a3所示的位置相对应的时刻的自行车3的位置。
114.首先,在本实施方式的驾驶辅助装置未搭载于车辆1的情况下,由于驾驶技能的等级高的驾驶员在车辆a1所示的位置,在注意到从对向车辆x的阴影中出现的自行车3的时刻,能够预知本车辆在人行横道上会碰撞到自行车3这一情况,所以会使车辆1停止。另一方面,驾驶技能的等级低的驾驶员在车辆a1所示的位置,无法预知本车辆与自行车的碰撞,而保持原样继续行驶车辆1。进而,在车辆a2所示的位置也延迟了使车辆1停止的判断,结果在车辆a3所示的位置与自行车3碰撞。
115.另一方面,在车辆1搭载有本实施方式的驾驶辅助装置10的情况下,驾驶辅助装置10的交通状况预测部70在车辆a1所示的位置,识别包含人行横道和行驶车道的位置、交通信号机的亮灯状态、对向车辆x和自行车3的交通环境,并预测如果保持原样继续行驶车辆1则在车辆a3的位置车辆1会与自行车3碰撞这一情况。此时,驾驶辅助装置10的驾驶辅助控制部90设定为与作为驾驶员的驾驶倾向的失误的遭遇频率相应地执行不同的内容的驾驶辅助。在图5示出的例子中,在驾驶员的驾驶技术比较高并且失误的遭遇频率为低或中等的情况下,不特别地进行驾驶辅助动作。另一方面,在驾驶员的驾驶技术比较低并且失误的遭遇频率高的情况下,设定为进行基于语音实现的警告(建议)。
116.另外,在车辆1没有停止并且从车辆a1所示的位置前进到车辆a2所示的位置的期间(a1
→
a2),在驾驶员的驾驶技术比较高并且失误的遭遇频率为低或中等的情况下,设定为进行基于语音实现的警告(建议)。另一方面,在驾驶员的驾驶技术比较低并且失误的遭遇频率高的情况下,设定为为了使车辆1的驱动扭矩降低而进行对车辆控制的干预。
117.进而在之后车辆1仍然没有停止的情况下,在从车辆a2所示的位置前进到车辆a3所示的位置的期间(a2
→
a3),在驾驶员的驾驶技术比较高并且失误的遭遇频率为低的情况下,设定为进行基于警告音、警告灯的亮灯等实现的警告。另外,在驾驶员的驾驶技术比较高并且失误的遭遇频率为中等的情况下,设定为为了使车辆1的驱动扭矩降低而进行对车辆控制的干预。进而,在驾驶员的驾驶技术比较低并且失误的遭遇频率高的情况下,设定为为了使车辆1产生制动力而强制地使车辆1停止而进行对车辆控制的干预。
118.在驾驶员的失误的遭遇频率为低或中等的情况下,如果进一步地之后车辆1也没有停止而前进到车辆a3所示的位置,则设定为为了使车辆1产生制动力来强制地使车辆1停止而进行对车辆控制的干预。
119.这样,如果识别出搭载有驾驶辅助装置10的车辆1可能在车辆a3所示的位置与自行车3碰撞,则执行要使车辆1本身回避到达车辆a2所示的位置之后的移动的动作。因此,能够在驾驶员识别前预见车辆1的碰撞,从而降低车辆1的碰撞的危险。特别地,在图5示出的设定例中,结合判断的滞后的进展度,根据驾驶员的失误的遭遇频率而设定警告和对车辆控制的干预的动作内容。因而,能够抑制执行过度的警告或对车辆控制的干预动作,并且能
够在不妨碍顺畅的行驶的情况下执行警告或对行驶控制的干预动作。
120.为了设定警告或对车辆控制的干预动作的内容,与判断的滞后的进展度结合使用的驾驶员的驾驶倾向的信息并不限于驾驶员的失误的遭遇频率。例如,图6表示结合判断的滞后的进展度,使用相对评价的信息来设定警告或对车辆控制的干预动作的例子,所述相对评价是由危险度评价部91得到的车辆的危险度的评价与基于从乘车人信息检测部41发送的信息而检测出的驾驶员本身感到危险时的危险度的识别之间的相对评价。在该设定例中,根据驾驶员是否识别到与危险度评价部91的评价内容同等的危险度、与危险度评价部91的评价内容相比驾驶员对危险度更敏感还是与危险度评价部91的评价内容相比驾驶员对危险度迟钝,使警告或车辆控制的干预动作的设定内容不同。该情况下的驾驶员的危险度的识别并不限于根据驾驶员的驾驶技术的识别,而作为依赖于驾驶员在此时的驾驶的集中力或清醒程度的指标来体现。
121.另外,图7表示结合判断的滞后的进展度,使用基于累积于驾驶倾向数据库69的信息而推定的驾驶员对警告或车辆控制的干预动作的依赖度的信息,来设定警告或车辆控制的干预动作的例子。在该设定例中,将驾驶员对警告或车辆控制的干预动作的依赖度的等级分为低、中、高,并根据各个等级使警告或车辆控制的干预动作的设定内容不同。
122.由此,能够抑制执行过度的警告或对车辆控制的干预动作,并能够在不妨碍顺畅的行驶的情况下执行警告或对行驶控制的干预动作。在图5~图7所示的设定例的任一个中,开始执行警告或车辆控制的干预动作的时期根据驾驶员的驾驶操作的倾向而不同。具体地,驾驶员的失误的遭遇频率越高,并且与车辆的危险度评价相比驾驶员识别危险度越晚,或者驾驶员对驾驶辅助控制的依赖度越高,则开始执行警告或车辆控制的干预动作的时期越早。应予说明,图5~图7中的警告或车辆控制的干预动作的设定内容只是一例,能够适当地设定。另外,也可以使例示于图5~图7的多个设定例组合,而设定警告或车辆控制的干预动作的内容。
123.图8是表示行驶在狭窄的道路上的车辆1在超越自行车3时打算避免与接近的对向车辆x的碰撞而碰撞到自行车3的事例。与图4同样地,车辆a1、a2、a3分别表示碰撞之前的某时刻的车辆1的位置,自行车b1、b2、b3分别表示与车辆a1、a2、a3所示的位置相对应的时刻的自行车3的位置。
124.首先,在本实施方式的驾驶辅助装置未搭载于车辆1的情况下,由于驾驶技能的等级高的驾驶员在车辆a1所示的位置,在注意到对向车辆x正在接近的时刻,能够在超越自行车3时预知本车辆1将与对向车辆x碰撞这一情况,所以会使车辆1减速。另一方面,驾驶技能的等级低的驾驶员不能预知在车辆a1所示的位置本车辆1与对向车辆x的碰撞,而保持原样继续行驶车辆1。进而,在车辆a2所示的位置也延迟了使车辆1减速的判断,结果在车辆a3所示的位置与自行车3碰撞。
125.另一方面,在车辆1搭载有本实施方式的驾驶辅助装置10的情况下,驾驶辅助装置10的交通状况预测部70在车辆a1所示的位置,识别包含车辆1的行驶位置、对向车辆x和自行车3的交通环境,预测如果要保持原样继续行驶车辆1并超越自行车3则将与对向车辆碰撞这一情况。此时,驾驶辅助装置10的驾驶辅助控制部90为了避免本车辆1与对向车辆x和自行车3的碰撞或接触,设定为与驾驶员的驾驶倾向相应地执行不同内容的驾驶辅助。在图8所示的事例中,也能够应用图5~图7所示的设定例。
126.图9是表示行驶在三行车道道路的中央的行车道的车辆1在打算避开突然从左车道变更了行车道的其它车辆x而将行车道变更到了右车道时,接触到打算从后方超越本车辆1的二轮车5的事例。车辆a1、a2、a3分别表示接触之前的某时刻的车辆1的位置,并且二轮车c1、c2、c3分别表示与车辆a1、a2、a3所示的位置相对应的时刻的二轮车5的位置。
127.首先,在本实施方式的驾驶辅助装置未搭载于车辆1的情况下,由于驾驶技能的等级高的驾驶员在车辆a1所示的位置,在注意到了大型车辆y正在接近行驶在左车道的其它车辆x的前方的时刻,能够预知其它车辆x将变更行车道到中央行车道这一情况,所以会使车辆1减速。另一方面,驾驶技能的等级低的驾驶员不能预知其它车辆x变更行车道,而保持原样继续行驶车辆1。进而,在车辆a2所示的位置,也迟滞地注意到二轮车5正从后方进行超车动作,结果在车辆a3所示的位置车辆1与二轮车5接触。
128.另一方面,在车辆1搭载有本实施方式的驾驶辅助装置10的情况下,驾驶辅助装置10的交通状况预测部70在车辆a1所示的位置,识别包含车辆1的行驶位置、其它车辆x、y和二轮车5的交通环境,并预测如果保持原样继续行驶车辆1,则会与从左车道变更行车道的其它车辆x碰撞这一情况。此时,驾驶辅助装置10的驾驶辅助控制部90为了避免本车辆1与其它车辆x和二轮车5的碰撞或接触,设定为与驾驶员的驾驶倾向相应地执行不同内容的驾驶辅助。在图9所示的事例中,也能够应用图5~图7所示的设定例。
129.<3.驾驶辅助装置的控制处理>
130.接着,参照图10~图12所示的流程图,来说明通过本实施方式的驾驶辅助装置执行的控制处理。图10是表示由驾驶辅助控制部90进行的控制处理的整体的流程的流程图。图11是表示由交通状况预测部70进行的交通状况预测处理的流程的流程图,并且图12是表示由驾驶辅助控制部90进行的驾驶辅助控制处理的流程的流程图。在这些流程图中所表示的控制处理可以在车辆1的系统启动期间始终执行,也可以在有使驾驶辅助控制的动作开始的输入之后执行。
131.首先,交通状况预测部70预测车辆1所处的交通状况(步骤s11)。例如,如图11所示,交通环境识别部71基于从周围信息检测部43发送的信息而求取车辆1的周围环境的信息(步骤s41)。接着,交通参与者提取部73基于从周围信息检测部43发送的信息,提取出存在于车辆1的周围的其它车辆、行人、自行车等交通参与者(步骤s43)。接着,交通参与者行为推定部75将提取出的交通参与者的信息输入到行为学习模型79,并基于来自行为学习模型79的输出而推定各个交通参与者的行为(步骤s45)。接着,本车辆行为预测部77基于由车辆信息检测部45检测出的车辆1的行驶状态的信息和由操作信息检测部47检测出的车辆1的操作状态的信息而预测本车辆1的行为(步骤s47)。接着,交通状况理解预测部81针对本车辆1的周围的交通环境,将交通参与者的行为和本车辆的行为一同考虑进来而理解并预测本车辆的交通状况。这样,交通状况预测部70预测本车辆1所处的交通状况。
132.接着,失误检测部51检测车辆1的乘车人感到危险的状态即失误(步骤s13)。具体地,失误检测部51基于从乘车人信息检测部41发送的信息而取得用于推定车辆1的乘车人的情绪和/或感受的信息,并基于这些信息而检测失误。例如,在基于面部朝向和视线的信息而检测出乘车人正在目视车外这一情况的状态下,在脉搏或心跳、血压、心电等产生了急剧的变化的情况下,失误检测部51检测出失误。进一步地,也可以在基于面部朝向和视线的信息而检测出乘车人正在斜视这一情况之后,检测到从斜视的状态恢复到端正的视线的状
态时,在脉搏或心跳、血压、心电等产生了急剧的变化的情况下,失误检测部51检测出失误。
133.接着,失误检测部51将检测出失误时的车辆1所处的交通状况的数据输入到失误学习模型53,并使失误学习模型53依次学习(更新)(步骤s15)。检测失误的对象乘车人并不限于驾驶员,也可以包含同乘者。
134.接着,碰撞交错判定部57基于由交通状况预测部70预测出的交通状况,使用物理模型判定是否发生车辆1的碰撞或交错(步骤s17)。具体地,碰撞交错判定部57基于当前的交通环境、预测的交通参与者的行为、以及预测的本车辆的行为,根据物理模型来判定交通参与者的行为计划的轨迹与本车辆的行为计划的轨迹是否交错。
135.接着,危险预测部55基于由交通状况预测部70预测出的交通状况,使用失误学习模型53,预测车辆1的危险度(步骤s19)。具体地,危险预测部55将车辆的驾驶状态的信息和周围环境的信息的数据输入到失误学习模型53,并基于输出的失误的状态,预测本车辆的危险状态。在来自失误学习模型53的输出表示过去检测出失误的情况下,危险预测部55预测为预测的交通状况对于本车辆而言是危险的状态。基于车辆的乘车人实际感到危险的过去的事例,根据当前的交通状况客观地预测车辆1的危险状态。由此,能够从在碰撞交错判定部57中使用物理模型而判定的碰撞等的発生的准确度低的时刻开始,预测车辆1的碰撞等的发生。
136.接着,驾驶倾向推定部59参照驾驶倾向数据库69,推定驾驶员在预测出的交通状况下的驾驶倾向(步骤s21)。具体地,驾驶倾向推定部59参照驾驶倾向数据库69,推定在当前的交通状况下过去驾驶员本身感到危险的频率、驾驶员本身对驾驶辅助控制的依赖度等。由此,能够推定驾驶员的驾驶技术、在执行了驾驶辅助控制的情况下的有效性等,能够改变警告或车辆控制的干预动作的程度。
137.接着,驾驶辅助控制部90基于预测出的危险度执行驾驶辅助控制(步骤s23)。在本实施方式的驾驶辅助装置10中,驾驶辅助控制部90基于从乘车人信息检测部41发送的信息以及由危险预测部55、碰撞交错判定部57和驾驶倾向推定部59求取得到的信息,执行警告控制或车辆控制中的至少一种控制。例如,如图12所示,危险度评价部91根据由碰撞交错判定部57基于物理模型得到的危险状态的预测结果以及由危险预测部55基于失误学习模型得到的危险状态的预测结果,来综合地评价本车辆的危险度(步骤s51)。
138.接着,警告、控制执行判定部95基于危险度的评价结果判定是否需要执行警告控制或车辆控制(步骤s53)。如图5~图7所例示的那样,在本实施方式的驾驶辅助装置10中,警告、控制执行判定部95基于判断的滞后的进展度以及驾驶员的驾驶倾向的信息,来设定警告或车辆控制的干预动作的内容。具体地,警告、控制执行判定部95以判断的滞后的进展度越大,另外驾驶员的驾驶技术越低,另外驾驶员对驾驶辅助控制的依赖度越大,则对车辆控制的干预程度越大的方式设定警告或车辆控制的干预动作的内容。
139.另外,在警告装置31发出语音、进行文本显示的情况下,危险度评价语言化处理部93进行用于对乘车人进行警告的语言化处理(步骤s55)。由此,警告控制部61或车辆控制部63基于所设定的警告动作和车辆控制的干预动作,生成警告装置31或车辆控制装置33的控制信号。因而,对驾驶员提示避免车辆1的危险状态的驾驶操作,或者能够使车辆1自动地减速或者停止,来避免车辆1的碰撞等危险状态,另外能够减少损失。
140.接着,驾驶评价部65将通过各种运算预测出的车辆1的危险状态以及危险度的信
息、和实际进行的驾驶操作的信息累积于驾驶倾向数据库69,更新驾驶倾向数据库69(步骤s25)。由此,能够累积表示驾驶员个人的驾驶倾向的信息,能够提升由驾驶倾向推定部59的驾驶倾向的推定精度,并且能够与驾驶员的驾驶技术相应地在不妨碍顺畅的行驶的情况下执行驾驶辅助控制。
141.如以上所说明,根据本实施方式的驾驶辅助装置10,基于预测的本车辆1的行为和本车辆1的周围的交通参与者的行为,不仅以根据物理模型而判定的车辆1的碰撞等危险状态为基础,并且以根据学习过去车辆的乘车人感到危险的交通状况而得的失误学习模型53而预测的车辆1的碰撞的危险状态为基础来评价车辆1的危险度。因此,即使在用物理模型准确度低的状况下,也能够进行基于交通环境的客观的数据的危险预测,并能够在更早的时机开始警告或车辆控制的干预动作。由此,能够对驾驶员提示避免动作,并且能够使车辆1自主地进行避免危险状态的动作。
142.另外,根据本实施方式的驾驶辅助装置10,与假定会发生车辆1的碰撞等的时刻之前的判断的滞后的进展度相应地增大警告或车辆控制的干预程度。因此,能够抑制执行过度的警告或对车辆控制的干预动作这一情况,并能够在不妨碍顺畅的行驶的情况下执行警告或对行驶控制的干预动作。
143.另外,根据本实施方式的驾驶辅助装置10,不仅与驾驶员的判断的滞后的进展度相应地,而且与驾驶员的驾驶倾向相应地改变警告或车辆控制的干预程度。因此,能够与驾驶员个人的驾驶技术、对驾驶辅助控制的依赖度相应地使警告或车辆控制的干预程度不同,并且能够在不妨碍顺畅的行驶的情况下执行警告或对行驶控制的干预动作。
144.以上,边参照附图,边关于本发明的优选的实施方式详细地进行了说明,但是本发明并不限定于该例子。应了解的是,如果是具有本发明所属技术领域中的通常的知识的人员,则在记载于权利要求的技术思想的范围内,能够想到各种改变例或修正例这一情况是明了的,关于此当然也属于本发明的技术范围。
145.例如,在上述实施方式中,说明了驾驶辅助装置10的所有的构成要素搭载于车辆的例子,但是本发明并不限定于该例子。驾驶辅助装置10的一部分功能也可以设置于车外的设备,并构成为能够与车载的电子控制装置进行通信。例如,行为学习模型、失误学习模型以及驾驶倾向数据库之中的至少一个可以存储于车外的设备,并且构成为电子控制装置和车外的设备能够介由移动通信等无线通信网络进行通信。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

