1.本发明涉及周界安全防范技术领域,特别涉及一种看护电子围栏报警装置。
背景技术:
2.随着科技的发展,特别是视频技术、人工智能、模式识别等技术的发展,及周界安全防范及周界入侵检测技术也应运而生。周界防范特别是在看护电子围栏中的应用是非常重要的。但在传统的周界入侵与防范技术中,大多数的周界防范对于规则的多边形有效,比如直接采用移动检测框与周界的交集大小来判断是否越界,但是对于不规则的多边形会失效。有的采用物体的运动方向,但是因为本身方向计算会不准确而会影响精确度。这样就会影响电子围栏的报警,使得电子围栏的安全性受到影响。此外,利用帧差法或背景法能够求出当前帧的运动像素检测框,但是会因运动幅度的快慢而产生中空现象或和噪点相似被过滤。现有技术中的看护电子围栏,特别是用于看护婴幼儿的电子围栏需要准确性更高,且能够更及时准确地发出警报的功能。
技术实现要素:
3.为了解决上述问题,本发明的目的在于:本技术的装置支持任意多边形的周界防范;采用自适应运动历史处理方法,自适应处理运动快慢,还原运动历史轨迹,并且装置的结构简单,报警及时准确。
4.具体地,本发明提供一种看护电子围栏报警装置,所述装置包括:
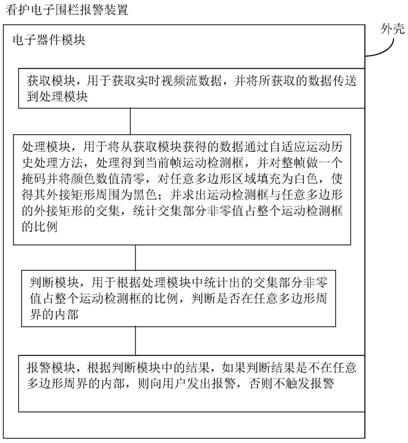
5.电子器件模块,其包括:获取模块,处理模块,判断模块和报警模块,其中,
6.获取模块,用于获取实时视频流数据,并将所获取的数据传送到处理模块;
7.处理模块,用于将从获取模块获得的数据通过自适应运动历史处理方法,处理得到当前帧运动检测框,并对整帧做一个掩码并将颜色数值清零,对任意多边形区域填充为白色,使得其外接矩形周围为黑色;并求出运动检测框与任意多边形的外接矩形的交集,统计交集部分非零值占整个运动检测框的比例;
8.判断模块,用于根据处理模块中统计出的交集部分非零值占整个运动检测框的比例,判断是否在任意多边形周界的内部;
9.报警模块,根据判断模块中的结果,如果判断结果是不在任意多边形周界的内部,则向用户发出报警,否则不触发报警;
10.外壳,用于容纳所述的电子器件模块。
11.由此,本技术的优势在于:通过本技术的装置可以解决任意不规则多边形周界防范的问题,适应性更强。同时也解决了产生中空现象或和噪点相似被过滤的问题,使得报警及时准确,并且其结构简单,易维护,成本低廉。
附图说明
12.此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分,并不
构成对本发明的限定。
13.图1是本发明装置的示意框图。
具体实施方式
14.为了能够更清楚地理解本发明的技术内容及优点,现结合附图对本发明进行进一步的详细说明。
15.此外,现有技术中的技术术语包括:
16.看护电子围栏:物体从内到外靠近围栏或从内到外小部分区域跨越围栏,发出报警信号,适用场景baby看护,小部分区域跨越可以理解为例如只有一个小脚伸出围栏。
17.短历史保留值:对当前帧的运动像素点重新赋值为一个较小的数,其值在后面每帧中如果不运动就会递减,直到0消失。简单理解为运动像素点保留的帧数比较短。
18.长历史保留值:对当前帧的运动像素点重新赋值为一个较大的数,其值在后面每帧中如果不运动就会递减,直到0消失。简单理解为运动像素点保留的帧数比较长。
19.mask就是遮罩,也叫掩码。
20.具体地,如图1所示,本发明涉及一种看护电子围栏报警装置,所述装置包括:
21.电子器件模块,其包括:获取模块,处理模块,判断模块和报警模块,其中,
22.获取模块,用于获取实时视频流数据,并将所获取的数据传送到处理模块;
23.处理模块,用于将从获取模块获得的数据通过自适应运动历史处理方法,处理得到当前帧运动检测框,并对整帧做一个掩码并将颜色数值清零,对任意多边形区域填充为白色,使得其外接矩形周围为黑色;并求出运动检测框与任意多边形的外接矩形的交集,统计交集部分非零值占整个运动检测框的比例;
24.判断模块,用于根据处理模块中统计出的交集部分非零值占整个运动检测框的比例,判断是否在任意多边形周界的内部;
25.报警模块,根据判断模块中的结果,如果判断结果是不在任意多边形周界的内部,则向用户发出报警,否则不触发报警;
26.外壳,用于容纳所述的电子器件模块。
27.其中,整帧是指的与当前帧图像比如分辨率是640*360一样大小的掩码图,第一步把整个掩码图设置初始值为0。运动检测需要在当前帧图像上的多个任意多边形的外接矩形上进行区域检测,比如有n个任意多边形,就会有n个区域进行运动检测,当前帧上的运动检测框会和掩码图上的任意多边形外接求交集。
28.所述处理模块中自适应运动历史处理方法进一步包括通过两帧差或三帧差得到当前帧的运动像素点,并根据保留的运动历史像素点,通过轮廓提取方法,获取当前帧运动检测框。
29.所述的轮廓提取方法是将图像二值化,二值图中可以设定1是前景图像、0是背景图像。
30.所述的处理模块中的处理过程,如果当前帧有运动像素,根据上一帧移动检测框的大小,预判断物体的运动速度,如果在n帧内(例如,n 为3-6),物体的高宽大于阈值(例如,阈值40,并可以根据灵敏度调整),为了避免长拖尾,其位置置为短历史保留值,如果物体的高宽小于阈值,为了防止目标过小或者垂直对向摄像头情况而导致目标漏检,运动像
素点的位置置为长历史保留值;
31.如果当前帧没有运动像素,但有保留的运动历史像素,对应的运动历史像素减1(例如,短历史保留值初值设为6,长历史保留值初值设为10)。
32.所述的运动检测框与任意多边形的交集为不规则形状,交集的部分为白色,其余的部分为黑色。
33.所述的白色的rgb的颜色值为255,所述的黑色的rgb的颜色值为0。
34.所述判断模块中的统计交集部分非零值占整个运动检测框的比例是统计交集部分非零点的数量占整个运动检测框的比例。
35.当统计交集部分非零值占整个运动检测框的比例大于阈值时,判定为不在任意多边形周界的内部,即超出电子围栏,触发报警模块。
36.所述的获取模块包括摄像头,所述的报警模块包括扬声器。
37.所述的获取模块和/或所述的报警模块内嵌于外壳或部分外露于外壳。
38.对于本技术装置中电子器件模块内应用的方法,可以理解为通过以下步骤完成的:
39.a通过自适应运动历史处理方法,得到物体运动检测框。
40.具体方法如下:
41.通过两帧差或三帧差得到当前帧的运动像素点,并根据保留的运动历史像素点,通过轮廓提取方法,获取当前帧运动检测框;
42.特别的:
43.如果当前帧有运动像素,根据上一帧移动检测框的大小,预判断物体的运动速度,如果在n帧内,物体的高宽大于阈值,为了避免长拖尾,其位置置为短历史保留值short_hst_val,如果物体的高宽小于阈值,为了防止目标过小或者垂直对向摄像头情况而导致目标漏检,运动像素点的位置置为长历史保留值long_hst_val。
44.如果当前帧没有运动像素,但有保留的运动历史像素,对应的运动历史像素减1。
45.b电子围栏的设计方法。
46.1对整帧做一个大的mask,清零。
47.2对任意多边形区域填充为白色,这样外接矩形周围为黑色。
48.3求出运动检测框与任意多边形的交集,其为不规则形状,因为交集部分为白色即255,其余部分为黑色为0,所以通过统计交集部分非零点的数量占整个运动检测框的比例即可得到是否在任意周界的内部。
49.其中,使用三帧差法举例检测区域中的运动目标得到前景图像:
50.具体的,在入侵检测环境下捕捉到的实时视频流制定感兴趣图像区域和周界防范动目标,得到前景图像。所述三帧差法包括以下步骤:
51.h1、通过两帧差d
n
(x,y)=|f
n
(x,y)-f
n-1
(x,y)|和d
n 1
(x,y)=|f
n 1
(x,y)-f
n
(x,y)|得到相邻的差分图像,其中f
n-1
(x,y)是第n-1 帧图像,f
n
(x,y)是第n帧图像,f
n 1
(x,y)是第n 1帧图像,n>1,且 n为整数;
52.其中,所述d
n
(x,y)为第n帧图像f
n
(x,y)和第n-1帧图像f
n-1
(x,y) 的两帧差,所述d
n 1
(x,y)为第n 1帧图像f
n 1
(x,y)和第n帧图像f
n
(x,y) 的两帧差。
53.h2、通过预设阈值,对上述得到的所述d
n
(x,y)和d
n 1
(x,y)进行二值化,得到二值
图像d
n
(x,y)和d
n 1
(x,y);
54.其中,所述d
n
(x,y)为两帧差d
n
(x,y)进行二值化后得到的二值图像,所述d
n 1
(x,y)为两帧差d
n 1
(x,y)进行二值化后得到的二值图像。
55.h3、通过公式对上述得到的所述二值图像d
n
(x,y)和d
n 1
(x,y)进行“and”操作得到前景图像mn(x,y)。
56.得到前景图像后,再根据历史运动方法消除空洞现象,得到完整的运动目标。并根据保留的运动历史像素点,通过轮廓提取方法,获取当前帧运动检测框。进而根据运动检测框,最终实现电子围栏报警装置中电子器件模块中各个模块的设计。
57.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明实施例可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

