1.本发明属于智能交通领域,具体涉及一种基于平行车道的无信号交叉口进口道车辆匹配与组织方法。
背景技术:
2.无信号交叉口是较为常见的交叉口类型之一,相比于信号灯控制的交叉口,无信号交叉口因为没有固定的相位分离手段,完全凭借驾驶人自主判断,所以在交叉口范围增加了许多可能的冲突点和冲突概率。有交通工程领域研究学者曾指出,无信号交叉口事故发生率远大于有信号交叉口。与此同时,交叉口通行效率也受到许多因素制约,其中一个重要因素就是驾驶员对是否可通过的判断,这主要是根据可接受间隙得出的,即每个驾驶员都有自己对于车辆是否要通过交叉口的安全间隙判断。综上,改善无信号交叉口通行安全性和通行效率的一个关键问题是如何增大车辆通过的间隙。
3.在已有的研究中,并没有太多学者关注于进口道的车辆组织,有的也多采用一种预警的车速引导,如在距离交叉口一段距离处进行提示,车辆获得交叉口前方交通信息后,相应调整车速从而避免在到达时紧急减速停车等候通过,等到可利用的插车间隙出现后再驶入。但这种方法使得到达的后续车辆很容易形成低速行驶的排队集结,同时也比较低效,因为其实际的研究对象是每个排队队列中的第一辆车,而对于后面的车的处理是滞后的。
4.随着网联汽车和自动驾驶技术的蓬勃发展,车辆间信息的互联互通更加广泛,多车协作成为研究热点。然而无论是有信号交叉口还是有无信号交叉口,研究绝大多数都只关注了局部几辆车的前后位置关系,然后建立冲突事件表、规则库等,对网联、自动驾驶环境下的交叉口车辆协同进行计算控制。实际上,对于无信号交叉口,不仅应该考虑每条车道中纵向的车辆状态关系,也应该考虑平行车道之间车辆横向的状态关系。这是因为无信号条件下通过交叉口的行为是以交替穿插间隙为主的,而同一进口道的多条车道间车辆通行状态是会直接影响交叉口一些其他方向车流的。综上,无论是车速引导还是现有的局部多车协作,在进口道车辆的组织中都没有为无信号交叉口车辆穿插间隙提供有效的支持,只局限于车辆纵向距离和纵向冲突,而没有考虑横向关系对无信号交叉口通行效率的直接影响。
技术实现要素:
5.为了弥补上述现有无信号交叉口车辆组织方法对横向车辆关系处理上的不足,本发明提供了一种基于平行车道的无信号交叉口进口道车辆匹配与组织方法,所述平行车道是指同一进口的各个车道。本发明通过获取到的车辆参数计算进口道各平行车道间车辆状态关系,建立数学规划模型分配各车辆间的匹配关系,将平行车道中状态较为接近的车辆进行匹配形成平行车组,通过求解模型实现进口道整体上匹配成本最低目标,从而显著提升交叉口车辆有效间隙,为无信号交叉口车辆通行提供支持。
6.为实现上述目的,本发明提供了一种基于平行车道的无信号交叉口进口道车辆匹
配与组织方法,包括如下步骤:
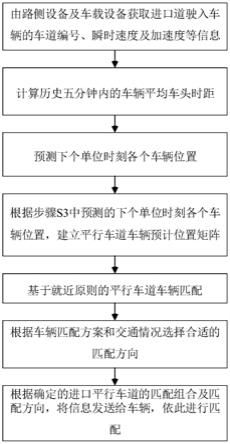
7.s1:建立所述进口道的车道编号集合j={1,2,...,l},l为车道数量,并利用路侧设备及车载设备获取所述进口道驶入车辆的车道编号,以及位于所述进口道上最上游的统计路段内的瞬时速度和加速度;
8.s2:统计所述进口道的每个车道在历史时间内通过的车辆数,计算所述进口道在历史时间内的车辆平均车头时距;
9.s3:基于步骤s1中获取的驶入车辆在统计路段内的瞬时速度和加速度,以及步骤s2中计算的所述进口道在历史时间内的车辆平均车头时距,预测下个单元时刻各驶入车辆在所述进口道的位置,所述下个单元时刻为当前时刻与一个车辆平均车头时距之和;
10.s4:基于步骤s3中预测的下个单元时刻各驶入车辆在所述进口道的位置,建立平行车道车辆预计位置矩阵;
11.s5:基于就近原则设计平行车道车辆匹配方案,所述平行车辆匹配是指将所述进口道的l个车道的驶入车辆匹配成组,每个组中各车道最多包括一个驶入车辆,当单组内匹配车辆个数不等于l时称为有缺匹配,反之则称为无缺匹配;所述就近原则是指,单组内匹配车辆的位置间应尽可能靠近;
12.s6:根据步骤s5中设计的平行车道车辆匹配方案和交通情况选择匹配方向,所述匹配方向包括正向匹配和反向匹配,所述正向匹配指以组内平行位置最靠前的车辆车头为目标追踪点的匹配方式;所述反向匹配指以组内平行位置最靠后的车辆车头为目标点的匹配方式;
13.s7:根据确定的进口平行车道的匹配组合及匹配方向,将信息发送给驶入车辆,依此进行匹配。
14.进一步,步骤s1中,路侧设备包括地磁线圈、毫米波雷达、高清摄像头中的一种或多种;所述车载设备包括gps和速度传感器;
15.进一步,步骤s1中,按照以下设定规则建立所述进口道的车道编号集合:由行驶方向最左侧车道为1,以此类推每向外侧一个车道,车道编号值加1。
16.进一步,所述统计路段的长度为length/3,length为所述进口道的总长。
17.进一步,步骤s2中,车辆平均车头时距计算公式如下:
[0018][0019]
其中,h为车辆平均车头时距;t为历史时间;c
k
为第k条车道在历史时间t内所通过车辆数。
[0020]
进一步,步骤s3中,第k车道第j辆车在所述进口道的下个单位时刻的预计位置x
′
jk
为:
[0021][0022]
其中,v
jk
为第k车道第j辆车的瞬时速度;a
jk
为第k车道第j辆车的加速度。
[0023]
进一步,步骤s4中,将所有车辆下个单位时刻的预计位置以归属的l条车道分列,以车辆驶入次序编号分行;设l条车道中,在所述进口道内的下个单位时刻驶入最多车辆的
车道的车辆数为m,则所建立的平行车道车辆预计位置矩阵大小为m
×
l,如下式:
[0024][0025]
其中,x
′
ml
为第l车道第m辆车在所述进口道的下个单位时刻的预计位置;
[0026]
因为所建立的平行车道车辆预计位置矩阵的行数是根据驶入车辆数的最大值确定的,因此在各车道车辆数不均衡情况下,车辆较少的车道对应的列中会存在空值,为方便列间运算,需赋予空值含义,若存在空值的列当前时刻没有车,则直接删除该列;若存在空值的列当前车辆数为1,则该列所有空值填充为该车的预计位置数据;若存在空值的列当前车辆数大于等于2,设该空值的位置为第k车道第h辆车,根据所建立的平行车道车辆预计位置矩阵得到该空值前面两辆车位置序号h
‑
2、h
‑
1和分别对应的预测位置x
′
h
‑
2,k
、x
′
h
‑
1,k
,按下式计算该空值的填充值:
[0027]
x
′
hk
=2x
′
h
‑
1,k
‑
x
′
h
‑
2,k
[0028]
其中,为用于填充平行车道预计位置矩阵第k列第h行空值的值。
[0029]
进一步,步骤s5中基于就近原则设计平行车道车辆匹配方案,具体过程为:
[0030]
步骤s4中的空值位置是留给作为假想匹配个体的属性值,保留有数值的空值位置不对应真实存在车辆,因此称为虚拟车;当虚拟车匹配分入某包含k
‑
1车辆的组时当做无缺匹配;遍历平行车道车辆预计位置矩阵所有元素,计算总计组间距,其公式为:
[0031][0032]
其中,d为总计组间距;d
j
为每组间各车辆位置与组平均位置距离之和;指第j组各车位置求算术平均值得到的平均位置;
[0033]
总计组间距计算完成后,找出总计组间距最小的方案作为匹配组合方案,当总计组间距相同时选择无缺匹配更多的方案,剔除掉用于填充的虚拟车,即得到了最终的匹配组合。
[0034]
进一步,步骤s6中,当驶入车辆平均车速低于限速值10km/h以下时,采用正向匹配以避免多车采取制动;当驶入车辆平均车速与道路限速相差小于等于10km/h时,采用反向匹配以减少整体车流在短时间内位移。
[0035]
本发明的有益效果:
[0036]
1)本发明创新地考虑了平行车道间的横向关系,避免了过往研究在车辆控制时决策的方向局限性,通过根据车辆当前参数预测未来位置,将横向关系与车辆纵向关系统一起来考虑,保证了平行车道车辆的匹配也符合一定的原始车辆纵向运行态势,平行车道间车辆组合可以有效提升各组之间的有效间隙,提高了纵向行驶的规律性,并且本发明可以与其他的纵向控制相关理论成果结合,具有较强的通用性和可扩展性;
[0037]
2)本发明通过位置预测、就近原则和匹配方向选择,考虑了动态的车辆运行场景,也将各个参数用计算的预计位置代替,缩减了每辆车匹配方案的计算量;提出了匹配方向问题,结合实际道路交通中,交叉口进口道可能的车速情况、道路限速等条件有效降低了车辆匹配成组的成本,也增强了车辆群体运行的稳定性。
附图说明
[0038]
图1为本发明实施例的基于平行车道的无信号交叉口进口道车辆匹配与组织方法流程图;
[0039]
图2为本发实施例的基于平行车道的无信号交叉口进口道车辆匹配与组织方法应用效果示意图。
具体实施方式
[0040]
下面结合附图和实施例进一步描述本发明,应该理解,以下所述实施例旨在便于对本发明的理解,而对其不起任何限定作用。以一条3车道的城市交叉口进口道为例,当前时刻该进口道范围内共有7辆车,路段限速为60km/h。
[0041]
如图1所示,本实施例的基于平行车道的无信号交叉口进口道车辆匹配与组织方法,包括如下步骤:
[0042]
s1:由路侧设备及车载设备获取进口道驶入车辆的车道编号以及驶入车辆在统计路段内的瞬时速度及加速度等信息。车道编号为统一设定规则为由行驶方向最左侧车道为1,以此类推每向外侧一个车道编号值加1,共有3条车道故车道编号集合j={1,2,3}。路侧设备可以包括但不限于地磁线圈、毫米波雷达、高清摄像头等。车载设备可以包括gps、速度传感器等。统计路段是进口道中最上游的一个区段,用于观测刚进入进口道的车辆状态,其长度可设为length/3,length为所述进口道的总长。
[0043]
s2:计算历史五分钟内的车辆平均车头时距;
[0044]
对于车道数为3的进口道,由统计得到各车道车辆在历史5分钟内所通过车辆总数为300,则平均车头时距计算公式为
[0045][0046]
计算得到平均车头时距为3s。
[0047]
s3:预测下个单位时刻各个车辆位置;
[0048]
所述下个单位时刻是指当前时刻与计算得到的进口道历史五分钟内的车辆平均车头时距之和。预测下个单位时刻的目的是,在平均车头时距中的位移一定程度上代表了本车向上一时刻前车位置的靠近过程,即便前车采取了制动,后车到达的位置仍具有相当的安全性。根据当前各车速度及加速度预测下个单位时刻的车辆位置。根据步骤s2所得该进口车辆的平均车头时距3s,计算可得到三个车道中7个车辆的位置x
′
={67,75;60.3,68.3,82.8;70.5,81.7},为统一单位,将km/h换算成m/s。
[0049]
s4:根据步骤s3中预测的下个单位时刻各个车辆位置,建立平行车道车辆预计位置矩阵:
[0050][0051]
在各车道车辆分配不均衡情况下,空值是可能存在的,为方便列间运算,需赋予空值数值含义。本实施例中,因为1、3列当前车辆数大于等于2,设空值的位置为第k车道第h辆车,根据建立平行车道车辆预计位置矩阵得到空值位置前面两辆车位置序号h
‑
2、h
‑
1和预
测位置x
′
h
‑
2,k
、x
′
h
‑
1,k
,按下式计算填充值:
[0052]
x
′
hk
=2x
′
h
‑
1,k
‑
x
′
h
‑
2,k
[0053]
其中,为用于填充平行车道预计位置矩阵第k列第h行空值的值。
[0054]
计算得到两个填充的预测值为59和59.3。
[0055]
s5:基于就近原则的平行车道车辆匹配;
[0056]
平行车辆匹配是指将驶入本实施例的3条车道中的1至3辆车匹配成组,其中,每个组中各车道最多选入1辆车,因此每组包含的最多车辆数为3,其中单组内匹配车辆个体数不等于3称之为有缺匹配,反之则都为无缺匹配。就近原则是指,同组匹配车辆的位置间应尽可能靠近,如果位置距离远可能导致匹配效率的极大降低。具体地,基于就近原则的平行车道车辆匹配是指,根据所述步骤s4所建立的平行车道车辆预计位置矩阵,计算列与列之间各元素的差值。
[0057]
其中所述空置位置是留给作为假想匹配个体的属性值,保留有数值的空值位置不对应真实存在车辆,称为虚拟车。遍历平行车道车辆预计位置矩阵所有元素,找出总计组间距最小的方案作为匹配组合方案,当总计组间距相同时选择无缺匹配更多的方案,总计组间距计算公式为:
[0058][0059]
剔除虚拟车之后得到的总计组间距最小方案下的匹配组合是:
[0060]
r1={v
11
,v
21
,v
31
};r2={v
12
,v
22
,v
32
};r3={v
23
}
[0061]
其中,r1、r2、r3为3个匹配组;v
kj
为第k车道第j辆车,k=1,2,3,j=1,2,3。
[0062]
s6:根据车辆匹配方案和交通情况选择合适的匹配方向;
[0063]
匹配方向划分为两种,正向匹配指以组内平行位置最靠前的车辆车头为目标追踪点的匹配方式,反向匹配指以组内平行位置最靠后的车辆车头为目标点的匹配方式,当车速低于限速值10km/h以下时,可采用正向匹配避免多车采取制动;当平均车速较高,与道路限速相差小于等于10km/h时,采用反向匹配以减少整体车流在短时间内位移。本实施例中,所有车辆的预计速度都小于50km/h,因此全部以组内最前方车辆为匹配基准进行正向匹配。
[0064]
s7:根据确定的进口平行车道的匹配组合及匹配方向,将信息发送给车辆,依此进行匹配。
[0065]
综上,本发明通过对车辆进行横向匹配,使车辆能在无信号交叉口中,特别多车道、多相位的无信号交叉口中构建更大的插车间隙,在车流量较大时为各车实现相对安全有效的交叉口通行提供更好保障。
[0066]
对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以对本发明的实施例做出若干变型和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

