1.本发明涉及控制系统技术领域,具体为一种雷达和光电联动的控制系统及方法。
背景技术:
2.地面雷达可以有效的引导摄像头对入侵目标进行监控,但现有的地面雷达探测方法缺少杂波区域屏蔽功能,在探测目标时,会因部分区域的杂波过多而产生较高的误报率,影响正常使用,且现有的控制系统没有对监控区域进行优先级划分,无法让使用者直观的看到目标入侵了哪一级防护区域。
技术实现要素:
3.本发明的目的在于提供一种雷达和光电联动的控制系统及方法,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:一种雷达和光电联动的控制系统,包括监控终端、服务器、对地雷达本体和光电转台,所述服务器的一侧设置有监控终端,且监控终端与服务器通过无线网络连接,所述服务器的一侧设置有对地雷达本体,且对地雷达本体与服务器通过无线网络连接,所述服务器的一侧设置有光电转台,且光电转台与服务器通过无线网络连接。
5.一种雷达和光电联动的控制方法,包括步骤一,系统初始化;步骤二,目标发现;步骤三,目标引导;步骤四,目标识别;步骤五,目标跟踪;步骤六,入侵警报;
6.其中上述步骤一中,系统初始化包括以下步骤:
7.1)根据需要与环境信息布设监控终端、服务器和对地雷达本体;
8.2)建立监控终端与服务器之间的无线网络连接,建立对地雷达本体与服务器之间的无线网络连接;
9.3)初始化系统,设定对地雷达本体的屏蔽区域与非屏蔽区域;
10.4)在非屏蔽区域布设光电转台,并进行初始化设定;
11.5)建立光电转台与服务器之间的无线网络连接;
12.6)根据需要划分非屏蔽区域的优先级;
13.其中上述步骤二中,目标发现包括以下步骤:
14.1)启动对地雷达本体,对地雷达本体实时发射探测信号,并接收处理返回信号,对非屏蔽区域进行实时扫描监控;
15.2)目标物出现在非屏蔽区域,对地雷达本体获取目标物位置信息;
16.3)对地雷达本体将目标物位置信息通过无线网络上传给服务器;
17.其中上述步骤三中,目标引导包括以下步骤:
18.1)服务器接收到的多个目标物位置信息;
19.2)服务器对光电转台的引导优先级进行判定;
20.3)服务器通过无线网络发出ptz值给优先级最高区域内的光电转台;
21.其中上述步骤四中,目标识别包括以下步骤:
22.1)服务器将多个目标物位置信息传输给监控终端;
23.2)监控终端在gis地图上显示目标物位置信息;
24.其中上述步骤五中,目标跟踪包括以下步骤:
25.1)光电转台通过无线网络接收到ptz值,并根据ptz值进行调节;
26.2)光电转台对目标物进行跟踪,并实时将跟踪信息通过无线网络上传给服务器;
27.3)服务器将目标物跟踪信息传输给监控终端;
28.其中上述步骤六中,监控终端实时显示目标物跟踪信息,并发出入侵警报。
29.优选的,所述步骤一3)中,屏蔽区域为杂波误报较多的区域。
30.优选的,所述步骤一4)中,初始化设定包括摄像机参数设定、云台参数设定、热像仪参数设定和通讯协议设定。
31.优选的,所述步骤一6)中,在gis地图上划分非屏蔽区域的优先级,并将区域优先级的设定上传给服务器进行存储。
32.优选的,所述步骤三2)中,服务器根据划分的区域优先级对光电转台的引导优先级进行判定。
33.优选的,所述步骤五2)中,光电转台通过云台调节进行跟踪方向的变换,通过摄像机自动聚焦对目标物进行跟踪。
34.与现有技术相比,本发明所达到的有益效果是:本发明相较于现有的雷达和光电联动的控制系统,在系统初始化阶段通过划分屏蔽区域可以减少误报率,提高监控效率;本发明通过对非屏蔽区域进行优先级划分,可以直观的让使用者看到目标入侵了哪一级防护区域,然后按照优先级处理规则自动引导光电进行观察和跟踪。
附图说明
35.图1是本发明的框架示意图;
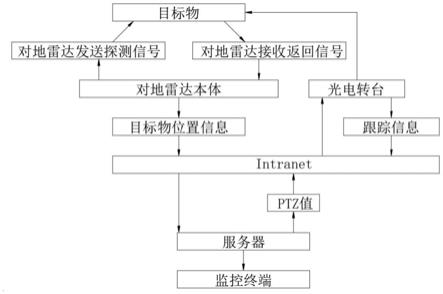
36.图2是本发明的原理图;
37.图3是本发明的方法流程图;
38.图中:1、监控终端;2、服务器;3、对地雷达本体;4、光电转台。
具体实施方式
39.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.请参阅图1,本发明提供一种技术方案:一种雷达和光电联动的控制系统,包括监控终端1、服务器2、对地雷达本体3和光电转台4,服务器2的一侧设置有监控终端1,且监控终端1与服务器2通过无线网络连接,服务器2的一侧设置有对地雷达本体3,且对地雷达本体3与服务器2通过无线网络连接,服务器2的一侧设置有光电转台4,且光电转台4与服务器2通过无线网络连接。
41.请参阅图2
‑
3,本发明提供一种技术方案:一种雷达和光电联动的控制方法,包括
步骤一,系统初始化;步骤二,目标发现;步骤三,目标引导;步骤四,目标识别;步骤五,目标跟踪;步骤六,入侵警报;
42.其中上述步骤一中,系统初始化包括以下步骤:
43.1)根据需要与环境信息布设监控终端1、服务器2和对地雷达本体3;
44.2)建立监控终端1与服务器2之间的无线网络连接,建立对地雷达本体3与服务器2之间的无线网络连接;
45.3)初始化系统,设定对地雷达本体3的屏蔽区域与非屏蔽区域,屏蔽区域为杂波误报较多的区域;
46.4)在非屏蔽区域布设光电转台4,并进行初始化设定,初始化设定包括摄像机参数设定、云台参数设定、热像仪参数设定和通讯协议设定;
47.5)建立光电转台4与服务器2之间的无线网络连接;
48.6)根据需要在gis地图上划分非屏蔽区域的优先级,并将区域优先级的设定上传给服务器2进行存储;
49.其中上述步骤二中,目标发现包括以下步骤:
50.1)启动对地雷达本体3,对地雷达本体3实时发射探测信号,并接收处理返回信号,对非屏蔽区域进行实时扫描监控;
51.2)目标物出现在非屏蔽区域,对地雷达本体3获取目标物位置信息;
52.3)对地雷达本体3将目标物位置信息通过无线网络上传给服务器2;
53.其中上述步骤三中,目标引导包括以下步骤:
54.1)服务器2接收到的多个目标物位置信息;
55.2)服务器2根据划分的区域优先级对光电转台4的引导优先级进行判定;
56.3)服务器2通过无线网络发出ptz值给优先级最高区域内的光电转台4;
57.其中上述步骤四中,目标识别包括以下步骤:
58.1)服务器2将多个目标物位置信息传输给监控终端1;
59.2)监控终端1在gis地图上显示目标物位置信息;
60.其中上述步骤五中,目标跟踪包括以下步骤:
61.1)光电转台4通过无线网络接收到ptz值,并根据ptz值进行调节;
62.2)光电转台4对目标物进行跟踪,光电转台4通过云台调节进行跟踪方向的变换,通过摄像机自动聚焦对目标物进行跟踪,并实时将跟踪信息通过无线网络上传给服务器2;
63.3)服务器2将目标物跟踪信息传输给监控终端1;
64.其中上述步骤六中,监控终端1实时显示目标物跟踪信息,并发出入侵警报。
65.基于上述,本发明的优点在于,使用本发明进行雷达和光电联动监控时,首先由对地雷达本体3通过发射探测信号和接收返回信号对非屏蔽区域进行实时扫描,目标物出现在非屏蔽区域内,对地雷达本体3可立即得到目标位置信息,然后将目标物位置信息通过intranet上传给服务器2,服务器2将位置信息传输给监控终端1,监控终端1在划分了优先级的gis地图上显示,同时,服务器2对多个位置信息按照设定的优先级进行判断,向优先级最高的区域内的光电转台4发送ptz值,对应的光电转台4经intranet接收到ptz值,根据ptz值进行自动调整,对目标进行跟踪,并将跟踪信息经intranet上传给服务器2,由服务器2传输给监控终端1,最终由监控终端1进行显示,并发出警报。
66.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

