本实用新型涉及图书管理智能设备技术领域,具体涉及一种用于自助借还书的图书借还装置。
背景技术:
自助图书借还系统能够为读者提供不受工作日及工作时间限制的图书借还服务,有效的减轻了图书馆的人员需求压力,方便了读者借还图书。目前的图书借还通过在图书上贴附分配的唯一条形码进行识别分辨,并通过在图书内置磁条或rfid芯片,确保图书不会被非法借阅甚至丢失。但目前的图书借还设备,不能自动的将图书归还到书架,也不能自动的从书架上取出。需要读者自行取书,读者还书后仍然需要安排工作人员进行书籍的归架,影响图书馆图书管理的效率。
中国专利cn110555959a,公开日2019年12月10日,一种智能书柜系统,包括柜体,所述柜体上还包括:多个书格,用于存取图书;多个格门,一一对应的安装于所述书格的开口处;多个电控锁,一一对应的安装于所述多个格门上,用于分别打开或关闭所述多个格门;智能控制终端,包括控制模块、刷卡感应模块、rfid模块和存储模块,制模块分别与所述刷卡感应模块、rfid模块、存储模块和电控锁连接,刷卡感应模块与所述刷卡器信号连接。其技术方案将图书划分若干区域并配置rfid天线,分区域盘点有助于提高图书盘点效率,同时实现图书借还操作的智能化管理。但其不能解决读者借还书效率低、且仍然需要人工参与的技术问题。
技术实现要素:
本实用新型要解决的技术问题是:目前图书的自助借还仍然需要人工参与,导致借还效率低的技术问题。提出了一种用于自助借还书的图书借还装置,本系统能够自动完成取书、读者自助借还书以及图书归架,提高了图书馆的自动化水平,降低了工作人员的需求。
为解决上述技术问题,本实用新型所采取的技术方案为:一种用于自助借还书的图书借还装置,所述图书内夹有磁条,图书背面贴有条形码,包括借还机、若干个书夹具和若干个取书机器人,所述借还机包括壳体、触摸屏、条形码扫描器、借书口、借书仓、借书投入口、还书口、还书仓、还书取出口、消磁模块、磁化模块和借还控制器,所述触摸屏安装在壳体上,所述壳体位于触摸屏前方设有操作平台,所述条形码扫描器安装在所述操作平台上,所述借书口以及还书口均设置在所述操作台上,所述借书口以及还书口分别位于条形码扫描器两侧,所述借书仓与借书口连通,所述借书投入口与借书仓连通,所述还书仓与还书口连通,所述还书取出口与还书仓连通,所述借书口以及还书口均覆盖有可控仓门,所述可控仓门、消磁模块以及磁化模块均借还控制器连接,所述借书口以及还书口形状及尺寸均与书夹具匹配,所述消磁模块位于借书仓附近,所述磁化模块位于还书仓附近,所述取书机器人具有与书夹具匹配的夹爪,所述夹爪上安装有rfid读取模块,所述rfid读取模块以及取书机器人均与借还控制器通信连接;所述书夹具包括左立板、左搁板、左底板、右立板、右搁板、右底板、条形码窗、定位筒、定位杆和弹性装置,所述左搁板以及左底板均固定在左立板下部,所述左底板在左搁板之下,所述右搁板以及右底板均固定在右立板下部,所述右底板在右搁板之下,所述定位筒固定安装在左立板上且位于左底板和左搁板之间,所述定位杆固定安装在右立板上且位于右底板和右搁板之间,所述定位杆插入所述定位筒,所述弹性装置安装在左立板和右立板之间,所述弹性装置使左立板和右立板具有靠近的趋势,所述左立板以及右立板上均加工有条形码窗,所述左底板上安装有锁紧环,所述取书机器人具有载书仓,所述载书仓的底部设有锁定勾,所述锁紧环和锁定勾匹配。取书机器人借助rfid读取模块能够读取图书内的rfid芯片,获得书名和其编号,从而能够自动从书架上取回图书,通过借还机提供给读者借阅,读者还书后,取书机器人能够从借还机上取走读者归还的图书,并能够将图书归架,完成图书的自动借阅和归架,降低了图书馆对工作人员的需求。
作为优选,所述借书仓以及还书仓分别安装在壳体两侧,所述借书仓将取书机器人放入借书投入口的夹有书夹具的图书运送到借书口,所述还书仓将取书机器人放入还书取出口的空的书夹具运送到还书口,读者将图书放入书夹具后,所述还书仓将夹有书夹具的图书运送到还书取出口,所述取书机器人从还书取出口取出读者归还的图书。通过借书仓以及还书仓能够方便借还机与取书机器人的对接。
作为优选,所述借书仓包括借书仓壳、借书横推杆和借书推出杆,所述还书仓包括还书仓壳、还书推出杆和还书横推杆,所述借书仓壳与壳体固定连接,借书仓壳具有借书移动道,所述借书移动道、借书投入口以及借书口的底部平齐,所述借书移动道连通借书投入口和借书口,所述借书横推杆安装在借书移动道靠近借书投入口的一侧,所述借书推出杆位于借书口远离读者的一侧,所述还书仓壳与壳体固定连接,还书仓壳具有还书移动道,所述还书移动道、还书取出口以及还书口的底部平齐,所述还书移动道连通还书取出口和还书口,所述还书横推杆安装在还书移动道靠近还书取出口的一侧,所述还书推出杆位于还书口远离读者的一侧,所述借书横推杆、借书推出杆、还书推出杆以及还书横推杆均与借还控制器连接。当取书机器人将带有书夹具的图书投入借书投入口时,借书横推杆将带有书夹具的图书推动到借书口,借书口内的借书推出杆伸长,将带有书夹具的图书推动到借书口的前端,供读者取书,而后借书推出杆收缩,将空的书夹具收回到借书仓内,借书横推杆与空的书夹具连接,而后借书横推杆收缩,将空的书夹具带动到借书投入口,由取书机器人将空的书夹具取走;当有读者还书时,取书机器人将空的书夹具放入还书取出口,还书横推杆将空的书夹具推动到还书口,还书口内的还书推出杆伸长,将空的书夹具推动到还书口的前端,读者将图书扫码登记还书后,将图书放入到书夹具中,而后磁化模块读取图书内的磁条,确认读者已还书并将磁条磁化,而后还书推出杆收缩,将带有书夹具的图书收回到还书仓内,还书横推杆与书夹具连接,而后还书横推杆收缩,将带有书夹具的图书带动到还书取出口,由取书机器人取出。
作为优选,所述取书机器人包括行走台、行走轮、载书柜、机械臂、若干个障碍检测器、近场定位装置、通信模块和机器人控制器,所述行走轮安装在行走台部,所述载书柜安装在行走台上面,所述机械臂安装在载书柜上,若干个所述障碍检测器安装在行走台的各个侧面,检测行走台周围的障碍物,所述近场定位装置、通信模块以及机器人控制器均安装在行走台内,所述障碍检测器、通信模块、近场定位装置以及机械臂均与机器人控制器连接。能够自行行走和自动规划行走路线的机器人载具,及行走台和行走轮,为现有技术。在行走台上设置载书柜能够实现取书机器人一次携带多本图书。
作为优选,所述载书柜两面开口,所述开口面安装若干层隔板,若干层所述隔板将开口分隔为若干个载书仓。
作为优选,所述书夹具包括左立板、左搁板、左底板、右立板、右搁板、右底板、条形码窗、定位筒、定位杆和弹性装置,所述左搁板以及左底板均固定在左立板下部,所述左底板在左搁板之下,所述右搁板以及右底板均固定在右立板下部,所述右底板在右搁板之下,所述定位筒固定安装在左立板上且位于左底板和左搁板之间,所述定位杆固定安装在右立板上且位于右底板和右搁板之间,所述定位杆插入所述定位筒,所述弹性装置安装在左立板和右立板之间,所述弹性装置使左立板和右立板具有靠近的趋势,所述左立板以及右立板上均加工有条形码窗。左立板以及右立板具有靠近的趋势,使得书夹具能够夹紧图书。
作为优选,所述弹性装置包括四根连杆、滑杆、弹簧和滑筒,两根所述连杆一端与左底板转动连接,另两根连杆一端与右底板转动连接,与左底板和右底板连接的连杆位置两两对应,所述滑杆和滑筒一端分别转动连接对应位置的连杆,所述滑杆套入所述滑筒内,所述弹簧安装在所述滑筒和滑杆之间,所述弹簧受压缩。
作为优选,所述左立板和右立板均连接有背板,两个所述背板上开设有书名观察窗。
作为优选,所述左底板上安装有锁紧环,所述取书机器人具有载书仓,所述载书仓的底部设有锁定勾,所述锁紧环和锁定勾匹配。
作为优选,所述左立板加工有孔,所述锁紧环与所述孔同心固定安装,所述锁紧环一侧的高度高于另一侧,所述锁定勾包括锁头、锁杆、转动座、转动摆杆、摆动弹簧、电子开关k1和直流电源bt1,所述锁头安装在锁杆上,所述锁杆与转动座固定连接,所述转动座与载书仓转动连接,所述载书仓底部加工有空腔,所述转动摆杆、摆动弹簧、电子开关k1以及直流电源bt1均位于所述空腔内,所述摆动弹簧两端分别有转动摆杆和空腔内壁固定连接,所述摆动弹簧两端通过导线与电子开关k1和直流电源bt1串联连接,所述电子开关k1控制端与机器人控制器连接。电子开关k1以一定频率开闭,控制通过摆动弹簧的电流,通过转动摆杆带动转动座转动,完成锁紧和解锁。
本实用新型的实质性效果是:取书机器人借助rfid读取模块能够读取图书内的rfid芯片,获得书名和其编号,从而能够自动从书架上取回图书,通过借还机提供给读者借阅,读者还书后,取书机器人能够从借还机上取走读者归还的图书,并能够将图书归架,完成图书的自动借阅和归架,降低了图书馆对工作人员的需求。
附图说明
图1为实施例一系统结构示意图。
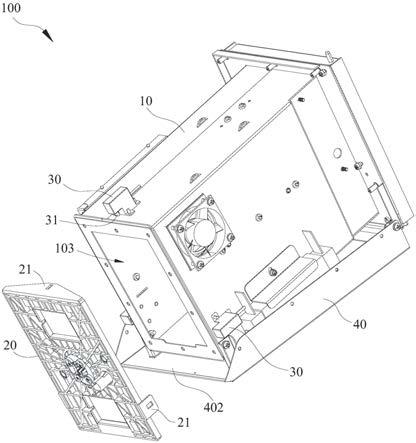
图2为实施例一借还机结构示意图。
图3为实施例一借还机剖面结构示意图。
图4为实施例一取书机器人结构示意图。
图5为实施例一书夹具结构示意图。
图6为实施例一书夹具背面结构示意图。
图7为实施例二书夹具俯视结构示意图。
图8为实施例二书夹具锁紧环结构示意图。
图9为实施例二锁定勾结构示意图。
其中:1、取书机器人,2、借还机,101、机械臂,102、载书柜,103、锁定勾,1031、锁头,1032、锁杆,1033、转动座,1034、转动摆杆,1035、摆动弹簧,104、载书仓,105、障碍检测器,106、行走轮,107、隔板,108、行走台,201、触摸屏,202、壳体,203、借书口,204、借书仓,205、条形码扫描器,206、还书口,207、还书仓,208、借书投入口,209、借书横推杆,210、借书推出杆,211、消磁模块,212、磁化模块,213、还书推出杆,214、还书横推杆,215、还书取出口,301、左立板,302、左搁板,303、左底板,304、条形码窗,305、右立板,306、右搁板,307、右底板,308、书名观察窗,309、定位筒,310、连杆,311、滑杆,312、锁紧环,313、弹簧,314、滑筒,315、定位杆。
具体实施方式
下面通过具体实施例,并结合附图,对本实用新型的具体实施方式作进一步具体说明。
实施例一:
一种用于自助借还书的图书借还装置,如图1、图2所示,本实施例包括借还机2、若干个书夹具和若干个取书机器人1,借还机2包括壳体202、触摸屏201、条形码扫描器205、借书口203、借书仓204、借书投入口208、还书口206、还书仓207、还书取出口215、消磁模块211、磁化模块212和借还控制器,触摸屏201安装在壳体202上,壳体202位于触摸屏201前方设有操作平台,条形码扫描器205安装在操作平台上,借书口203以及还书口206均设置在操作台上,借书口203以及还书口206分别位于条形码扫描器205两侧,借书仓204与借书口203连通,借书投入口208与借书仓204连通,还书仓207与还书口206连通,还书取出口215与还书仓207连通,借书口203以及还书口206均覆盖有可控仓门,可控仓门、消磁模块211以及磁化模块212均借还控制器连接,借书口203以及还书口206形状及尺寸均与书夹具匹配,消磁模块211位于借书仓204附近,磁化模块212位于还书仓207附近,取书机器人1具有与书夹具匹配的夹爪,取书机器人1与借还控制器通信连接。图书内夹有磁条,图书背面贴有条形码,取书机器人1借助rfid读取模块能够读取图书内的rfid芯片,获得书名和其编号,从而能够自动从书架上取回图书,通过借还机2提供给读者借阅,读者还书后,取书机器人1能够从借还机2上取走读者归还的图书,并能够将图书归架,完成图书的自动借阅和归架,降低了图书馆对工作人员的需求。
借书仓204以及还书仓207分别安装在壳体202两侧,借书仓204将取书机器人1放入借书投入口208的夹有书夹具的图书运送到借书口203,还书仓207将取书机器人1放入还书取出口215的空的书夹具运送到还书口206,读者将图书放入书夹具后,还书仓207将夹有书夹具的图书运送到还书取出口215,取书机器人1从还书取出口215取出读者归还的图书。通过借书仓204以及还书仓207能够方便借还机2与取书机器人1的对接。
如图3所示,借书仓204包括借书仓204壳、借书横推杆209和借书推出杆210,还书仓207包括还书仓207壳、还书推出杆213和还书横推杆214,借书仓204壳与壳体202固定连接,借书仓204壳具有借书移动道,借书移动道、借书投入口208以及借书口203的底部平齐,借书移动道连通借书投入口208和借书口203,借书横推杆209安装在借书移动道靠近借书投入口208的一侧,借书推出杆210位于借书口203远离读者的一侧,还书仓207壳与壳体202固定连接,还书仓207壳具有还书移动道,还书移动道、还书取出口215以及还书口206的底部平齐,还书移动道连通还书取出口215和还书口206,还书横推杆214安装在还书移动道靠近还书取出口215的一侧,还书推出杆213位于还书口206远离读者的一侧,借书横推杆209、借书推出杆210、还书推出杆213以及还书横推杆214均与借还控制器连接。当取书机器人1将带有书夹具的图书投入借书投入口208时,借书横推杆209将带有书夹具的图书推动到借书口203,借书口203内的借书推出杆210伸长,将带有书夹具的图书推动到借书口203的前端,供读者取书,而后借书推出杆210收缩,将空的书夹具收回到借书仓204内,借书横推杆209与空的书夹具连接,而后借书横推杆209收缩,将空的书夹具带动到借书投入口208,由取书机器人1将空的书夹具取走;当有读者还书时,取书机器人1将空的书夹具放入还书取出口215,还书横推杆214将空的书夹具推动到还书口206,还书口206内的还书推出杆213伸长,将空的书夹具推动到还书口206的前端,读者将图书扫码登记还书后,将图书放入到书夹具中,而后磁化模块212读取图书内的磁条,确认读者已还书并将磁条磁化,而后还书推出杆213收缩,将带有书夹具的图书收回到还书仓207内,还书横推杆214与书夹具连接,而后还书横推杆214收缩,将带有书夹具的图书带动到还书取出口215,由取书机器人1取出。
如图4所示,取书机器人1包括行走台108、行走轮106、载书柜102、机械臂101、若干个障碍检测器105、近场定位装置、通信模块和机器人控制器,行走轮106安装在行走台108部,载书柜102安装在行走台108上面,机械臂101安装在载书柜102上,若干个障碍检测器105安装在行走台108的各个侧面,检测行走台108周围的障碍物,近场定位装置、通信模块以及机器人控制器均安装在行走台108内,障碍检测器105、通信模块、近场定位装置以及机械臂101均与机器人控制器连接。能够自行行走和自动规划行走路线的机器人载具,及行走台108和行走轮106,为现有技术,在此不做赘述。在行走台108上设置载书柜102能够实现取书机器人1一次携带多本图书。载书柜102两面开口,开口面安装若干层隔板107,若干层隔板107将开口分隔为若干个载书仓104。
如图5、图6所示,书夹具包括左立板301、左搁板302、左底板303、右立板305、右搁板306、右底板307、条形码窗304、定位筒309、定位杆315和弹性装置,左搁板302以及左底板303均固定在左立板301下部,左底板303在左搁板302之下,右搁板306以及右底板307均固定在右立板305下部,右底板307在右搁板306之下,定位筒309固定安装在左立板301上且位于左底板303和左搁板302之间,定位杆315固定安装在右立板305上且位于右底板307和右搁板306之间,定位杆315插入定位筒309,弹性装置安装在左立板301和右立板305之间,弹性装置使左立板301和右立板305具有靠近的趋势,左立板301以及右立板305上均加工有条形码窗304。左立板301和右立板305均连接有背板,两个背板上开设有书名观察窗308。
本实施例的有益技术效果是:取书机器人1借助rfid读取模块能够读取图书内的rfid芯片,获得书名和其编号,从而能够自动从书架上取回图书,通过借还机2提供给读者借阅,读者还书后,取书机器人1能够从借还机2上取走读者归还的图书,并能够将图书归架,完成图书的自动借阅和归架,降低了图书馆对工作人员的需求。
实施例二:
一种用于自助借还书的图书借还装置,本实施例在实施例一基础上,对书夹具做了进一步的改进,如图7所示,弹性装置包括四根连杆310、滑杆311、弹簧313和滑筒314,两根连杆310一端与左底板303转动连接,另两根连杆310一端与右底板307转动连接,与左底板303和右底板307连接的连杆310位置两两对应,滑杆311和滑筒314一端分别转动连接对应位置的连杆310,滑杆311套入滑筒314内,弹簧313安装在滑筒314和滑杆311之间,弹簧313受压缩。
如图8、图9所示,左底板303上安装有锁紧环312,取书机器人1具有载书仓104,载书仓104的底部设有锁定勾103,锁紧环312和锁定勾103匹配。左立板301加工有孔,锁紧环312与孔同心固定安装,锁紧环312一侧的高度高于另一侧,锁定勾103包括锁头1031、锁杆1032、转动座1033、转动摆杆1034、摆动弹簧1035、电子开关k1和直流电源bt1,锁头1031安装在锁杆1032上,锁杆1032与转动座1033固定连接,转动座1033与载书仓104转动连接,载书仓104底部加工有空腔,转动摆杆1034、摆动弹簧1035、电子开关k1以及直流电源bt1均位于空腔内,摆动弹簧1035两端分别有转动摆杆1034和空腔内壁固定连接,摆动弹簧1035两端通过导线与电子开关k1和直流电源bt1串联连接,电子开关k1控制端与机器人控制器连接。电子开关k1以一定频率开闭,控制通过摆动弹簧1035的电流,通过转动摆杆1034带动转动座1033转动,完成锁紧和解锁。
以上所述的实施例只是本实用新型的一种较佳的方案,并非对本实用新型作任何形式上的限制,在不超出权利要求所记载的技术方案的前提下还有其它的变体及改型。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。