1.本技术属于飞机结构设计领域,特别涉及一种驱动装置的输出力矩计算方法。
背景技术:
2.随着飞机设计技术的发展及迫切的结构轻量化设计需求,活动部件新型驱动装置逐渐应用,其优点是占用空间少,可使驱动部件的连接支撑结构设计简捷,减轻结构重量。但由于受新型驱动装置驱动能力的限制,给多度静不定支撑结构的载荷计算带来了新的技术难题。
3.因此,希望有一种技术方案来克服或至少减轻现有技术的至少一个上述缺陷。
技术实现要素:
4.本技术的目的是提供了一种驱动装置的输出力矩计算方法,以解决现有技术存在的至少一个问题。
5.本技术的技术方案是:
6.一种驱动装置的输出力矩计算方法,所述驱动装置用于实现对驱动部件的支持结构的驱动,包括:
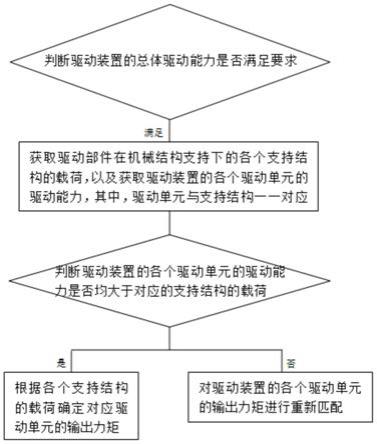
7.步骤一、判断驱动装置的总体驱动能力是否满足要求,若满足,则进入步骤二;
8.步骤二、获取所述驱动部件在机械结构支持下的各个支持结构的载荷,以及获取所述驱动装置的各个驱动单元的驱动能力,其中,所述驱动单元与所述支持结构一一对应;
9.步骤三、判断所述驱动装置的各个驱动单元的驱动能力是否均大于对应的支持结构的载荷,
10.若是,则根据各个支持结构的载荷确定对应驱动单元的输出力矩;
11.若否,则对所述驱动装置的各个驱动单元的输出力矩进行重新匹配。
12.在本技术的至少一个实施例中,所述驱动装置为电传以及液压操纵的分布式耳片结构。
13.在本技术的至少一个实施例中,所述驱动部件包括前缘舵面以及武器舱门,所述支持结构为支撑摇臂。
14.在本技术的至少一个实施例中,所述驱动装置包括4个驱动单元,所述驱动部件包括4个支撑摇臂。
15.在本技术的至少一个实施例中,步骤一中,所述判断驱动装置的总体驱动能力是否满足要求,具体包括:
16.s101、获取驱动装置的最大输出力矩;
17.s102、获取对驱动部件施加载荷时驱动部件转轴的力矩;
18.s103、判断驱动装置的最大输出力矩是否大于驱动部件转轴的力矩,若是,则驱动装置的总体驱动能力满足要求,若否,则驱动装置的总体驱动能力不满足要求。
19.在本技术的至少一个实施例中,s102中,所述获取对驱动部件施加载荷时驱动部
件转轴的力矩包括:
20.构建所述驱动部件的有限元模型;
21.将分布气动载荷施加到所述驱动部件的有限元模型中,获取所述驱动部件承受的总载荷以及压心位置;
22.根据总载荷以及压心位置计算得到驱动部件转轴的力矩。
23.在本技术的至少一个实施例中,步骤三中,所述对所述驱动装置的各个驱动单元的输出力矩进行重新匹配包括:
24.通过增加其他驱动单元的输出力矩,实现对驱动能力不大于对应的支持结构的载荷的驱动单元的输出力矩的补偿。
25.发明至少存在以下有益技术效果:
26.本技术的驱动装置的输出力矩计算方法,能够实现强度设计载荷计算的精细化,通过全方位多维度计算支持结构载荷,降低了结构不满足强度设计要求的风险。
附图说明
27.图1是本技术一个实施方式的驱动装置的输出力矩计算方法流程图。
具体实施方式
28.为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施例是本技术一部分实施例,而不是全部的实施例。下面通过参考附图描述的实施例是示例性的,旨在用于解释本技术,而不能理解为对本技术的限制。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。下面结合附图对本技术的实施例进行详细说明。
29.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术保护范围的限制。
30.下面结合附图1对本技术做进一步详细说明。
31.本技术提供了一种驱动装置的输出力矩计算方法,该驱动装置用于实现对驱动部件的支持结构的驱动,方法包括以下步骤:
32.步骤一、判断驱动装置的总体驱动能力是否满足要求,若满足,则进入步骤二;
33.步骤二、获取驱动部件在机械结构支持下的各个支持结构的载荷,以及获取驱动装置的各个驱动单元的驱动能力,其中,驱动单元与支持结构一一对应;
34.步骤三、判断驱动装置的各个驱动单元的驱动能力是否均大于对应的支持结构的载荷,
35.若是,则根据各个支持结构的载荷确定对应驱动单元的输出力矩;
36.若否,则对驱动装置的各个驱动单元的输出力矩进行重新匹配。
37.本技术的驱动装置的输出力矩计算方法,驱动装置一般为由电传以及液压操纵的分布式耳片结构,可以实现对前缘舵面以及武器舱门的驱动,该驱动装置的优点是可以减轻驱动装置支撑结构的重量。驱动部件包括前缘舵面以及武器舱门,支持结构可以是支撑摇臂,支持结构通过机械结构支持的方式实现对驱动部件的支撑。
38.本技术的驱动装置的输出力矩计算方法,首先需要根据驱动部件的严重载荷状态,计算出严重载荷对驱动部件转轴的力矩,并与驱动装置的驱动能力进行对比,确定新型驱动装置的驱动能力是否满足要求。具体的,步骤一中,判断驱动装置的总体驱动能力是否满足要求,包括:
39.s101、获取驱动装置的最大输出力矩;
40.s102、获取对驱动部件施加载荷时驱动部件转轴的力矩;
41.s103、判断驱动装置的最大输出力矩是否大于驱动部件转轴的力矩,若是,则驱动装置的总体驱动能力满足要求,若否,则驱动装置的总体驱动能力不满足要求。
42.s102中,获取对驱动部件施加载荷时驱动部件转轴的力矩包括:
43.构建驱动部件的有限元模型;
44.将分布气动载荷施加到驱动部件的有限元模型中,获取驱动部件承受的总载荷以及压心位置;
45.根据总载荷以及压心位置计算得到驱动部件转轴的力矩。
46.本实施例中,总载荷乘以压力到转轴的距离即为驱动部件转轴的力矩。
47.步骤三中,对驱动装置的各个驱动单元的输出力矩进行重新匹配包括:
48.本技术的驱动装置的输出力矩计算方法,通过增加其他驱动单元的输出力矩,实现对驱动能力不大于对应的支持结构的载荷的驱动单元的输出力矩的补偿。
49.在本技术的一个实施方案中,新型驱动装置的总体驱动能力即最大输出力矩为110kn
·
m,经计算某驱动部件严重载荷对驱动部件转轴的力矩为100kn
·
m,驱动装置的总体驱动能力大于某驱动部件严重载荷对驱动部件转轴的力矩,因此,新型驱动装置的总体驱动能力满足要求。本实施例中,某驱动部件由4个支撑摇臂支持,新型驱动装置包括4个驱动单元,各个支撑摇臂与对应的驱动单元连接。假定支撑摇臂与新型驱动装置为纯机械连接,按照传统的多度静不定计算方法,在有限元模型中模拟支撑摇臂的刚度及施加约束条件,并提取支撑摇臂载荷,得到各个支撑摇臂的载荷分别为:40kn
·
m、30kn
·
m、20kn
·
m、10kn
·
m。新型驱动装置的四个驱动单元的驱动能力分别为:40kn
·
m、20kn
·
m、30kn
·
m、20kn
·
m。通过与摇臂支撑载荷进行对比,可知第1、3、4个驱动装置的驱动单元的驱动能力满足要求,但是第2个驱动单元的驱动能力不够。则需要对驱动装置的各个驱动单元的输出力矩进行重新匹配,第2个驱动单元需承受30kn
·
m的载荷,由于其最大驱动能力为20kn
·
m,因此剩余的10kn
·
m载荷由第3个驱动单元承受,加上原来承受的载荷,第3个驱动单元最终承受30kn
·
m的载荷,第3个驱动单元的驱动能力为30kn
·
m,恰好满足要求。最后,可以基于新型驱动装置的4个驱动单元的输出力矩,即每个驱动单元最终承受的载荷分别为:40kn
·
m、20kn
·
m、30kn
·
m、10kn
·
m。从而实现了强度设计载荷的全方位、多维度、精细化。
50.本技术的驱动装置的输出力矩计算方法,能够实现强度设计载荷计算的精细化,通过全方位多维度计算支持结构载荷,降低了结构不满足强度设计要求的风险。
51.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何
熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
