一种3d线激光传感器的深度处理方法及点胶设备
技术领域
1.本发明涉及3d图像处理领域,具体是涉及一种3d线激光传感器的深度处理方法及点胶设备。
背景技术:
2.三维扫描是指集光、机、电和计算机技术于一体的高新技术,主要用于对物体空间外形和结构及色彩进行扫描,以获得物体表面的空间坐标能够将实物的立体信息转换为计算机能直接处理的数字信号,为实物数字化提供了相当方便快捷的手段。三维扫描技术能实现非接触测量,且具有速度快、精度高的优点。而且其测量结果能直接与多种软件接口,这使它在cad、cam、cims等技术应用日益普及的今天很受欢迎。
3.目前行业内大多采用常规3d处理策略,一次性处理点云数达数百万,运算资源消耗极大,处理时间较长且,能处理的任务较少,另一方面,常规2d策略虽然可以将3d转为2d深度图处理(例如pcl的rangeimage),但其转换策略必须依赖传感器fov、焦距等参数,同一算法在不同3d传感器甚至同传感器的不同扫描速度下均不具备良好的适应性,且常规2d
‑
3d转换策略针对无序性3d 数据无法建立映射关系,即转换为2d深度图后无法确定每个像素对应的点云编号,导致无法从原始数据进行筛选测量,精度损失极大。
技术实现要素:
4.为解决上述技术问题,提供一种3d线激光传感器的深度处理方法及点胶设备,本技术方案解决了上述背景技术中提出的目前行业内大多采用常规3d处理策略,一次性处理点云数达数百万,运算资源消耗极大,处理时间较长且,能处理的任务较少,另一方面,常规2d策略虽然可以将3d转为2d深度图处理(例如pcl的rangeimage),但其转换策略必须依赖传感器fov、焦距等参数,同一算法在不同3d传感器甚至同传感器的不同扫描速度下均不具备良好的适应性,且常规2d
‑
3d转换策略针对无序性3d数据无法建立映射关系,即转换为 2d深度图后无法确定每个像素对应的点云编号,导致无法从原始数据进行筛选测量,精度损失极大的问题。
5.为达到以上目的,本发明采用的技术方案为:
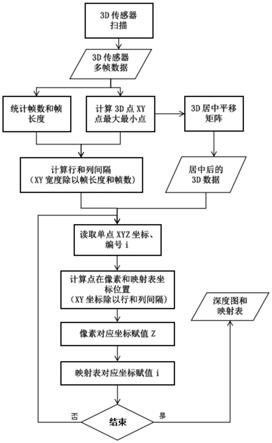
6.一种3d线激光传感器的深度处理方法,步骤如下:
7.s1.使用3d传感器对物体进行3d扫描得到物体的多帧数据;
8.s2.对物体的多帧数据进行处理调整;
9.s3.对物体进行单点坐标赋值并进行编号;
10.s4.保存s3中得到的深度图和映射表。
11.优选的,所述s2中对物体的多帧数据进行处理调整的具体步骤如下:
12.s201.系统对物体的多帧数据进行统计该批次点数据的帧数和每帧的长度;
13.s202.系统统计3d数据中最大和最小的xy值,并计算x宽度以及y宽度;
14.s203.通过最小xy值获得点云平移矩阵,让点云数据在xy方向上整体平移至第一
象限,同时保持z值不变;
15.s204.将x宽度/帧长度,获得点云列间距;
16.s205.将y宽度/帧数,获得点云行间距。
17.优选的,所述s3中对物体进行单点坐标赋值并进行标号的具体步骤如下:
18.s301.读取居中点云;
19.s302.将居中点云x坐标/列间距,获得该点云在深度图像中的列号;
20.s303.将居中点云y坐标/行间距,获得该点云在深度图像中的行号;
21.s304.将深度图对应行列位置的像素赋值为点云z坐标;
22.s305.将映射表对应行列位置的像素赋值为点云编号;
23.s306.更新物体的深度图和映射表。
24.s307.判断物体的每一点云是否均进行过坐标赋值并进行标号,若为是则输出深度图和映射表,若为否则返回s301。
25.进一步的,提出一种使用3d线激光传感器的深度处理方法的点胶设备,包括底座,所述底座上表面前端左右两侧分别设置有急停按钮以及控制板,所述底座前端从左到右依次固定连接有数据端口、机器人控制开关以及主开关,所述底座上表面固定连接有y轴运动轨,所述y轴运动轨上滑动连接有扫描载台,所述底座后端固定连接有支撑座,所述支撑座上固定连接有x轴运动轨,所述x 轴运动轨上滑动连接有z轴运动轨,所述z轴运动轨上滑动连接有安装板,所述安装板前端左侧固定连接有3d线扫传感器,所述安装板前端右侧固定连接有点胶器。
26.可选的,所述3d线扫传感器包括3d结构光扫设备、存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至3任一项所述的3d线激光传感器的深度处理方法
27.与现有技术相比,本发明的优点在于:
28.1)3d感知处理加速,快速生成2d深度数据及2d
‑
3d映射关系,自适应不同3d线扫传感器,无需传感器fov等标定参数,本算法实现对多种不同型号的3d线性激光扫描和处理进行简化和加速,对不同3d线扫传感器均具有良好的适配性;
29.2)不依赖3d数据的有序性,具备2d
‑
3d的双向映射表,转化为2d深度图后可确定每个像素对应的点云编号,可对原始数据进行筛选测量,不会丢失数据的精准度。
附图说明
30.图1为本发明提出的处理方法示意图;
31.图2为本发明中s2的具体步骤示意图;
32.图3为本发明中s3的具体步骤示意图;
33.图4为本发明提出的深度处理方法的流程图;
34.图5为本发明提出的点胶机的立体结构示意图。
35.图中标号为:
36.1、底座;2、控制板;3、主开关;4、控制开关;5、数据端口;6、扫描载台;7、y轴运动轨;8、x轴运动轨;9、安装板;10、点胶器;11、支撑座; 12、3d线扫传感器;13、z轴运动轨;14、急停按钮。
的双向映射表,转化为2d深度图后可确定每个像素对应的点云编号,可对原始数据进行筛选测量,不会丢失数据的精准度,能够更加精准的进行设备立体智能操作。
59.综上所述,本发明的优点在于:解决了不同3d线扫传感器下转换深度算法不通用的问题,提升系统适应性;不依赖3d数据的有序性,具备2d
‑
3d的双向映射表,不丢失数据的精准度。
60.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
技术特征:
1.一种3d线激光传感器的深度处理方法,其特征在于,步骤如下:s1.使用3d传感器对物体进行3d扫描得到物体的多帧数据;s2.对物体的多帧数据进行处理调整;s3.对物体进行单点坐标赋值并进行编号;s4.保存s3中得到的深度图和映射表。2.根据权利要求1所述的一种3d线激光传感器的深度处理方法,其特征在于,所述s2中对物体的多帧数据进行处理调整的具体步骤如下:s201.系统对物体的多帧数据进行统计该批次点数据的帧数和每帧的长度;s202.系统统计3d数据中最大和最小的xy值,并计算x宽度以及y宽度;s203.通过最小xy值获得点云平移矩阵,让点云数据在xy方向上整体平移至第一象限,同时保持z值不变;s204.将x宽度/帧长度,获得点云列间距;s205.将y宽度/帧数,获得点云行间距。3.根据权利要求1所述的一种3d线激光传感器的深度处理方法,其特征在于,所述s3中对物体进行单点坐标赋值并进行标号的具体步骤如下:s301.读取居中点云;s302.将居中点云x坐标/列间距,获得该点云在深度图像中的列号;s303.将居中点云y坐标/行间距,获得该点云在深度图像中的行号;s304.将深度图对应行列位置的像素赋值为点云z坐标;s305.将映射表对应行列位置的像素赋值为点云编号;s306.更新物体的深度图和映射表。s307.判断物体的每一点云是否均进行过坐标赋值并进行标号,若为是则输出深度图和映射表,若为否则返回s301。4.一种使用3d线激光传感器的深度处理方法的点胶设备,其特征在于,包括底座(1),所述底座(1)上表面前端左右两侧分别设置有急停按钮(14)以及控制板(2),所述底座(1)前端从左到右依次固定连接有数据端口(5)、机器人控制开关(4)以及主开关(3),所述底座(1)上表面固定连接有y轴运动轨(7),所述y轴运动轨(7)上滑动连接有扫描载台(6),所述底座(1)后端固定连接有支撑座(11),所述支撑座(11)上固定连接有x轴运动轨(8),所述x轴运动轨(8)上滑动连接有z轴运动轨(13),所述z轴运动轨(13)上滑动连接有安装板(9),所述安装板(9)前端左侧固定连接有3d线扫传感器(12),所述安装板(3)前端右侧固定连接有点胶器(10)。5.根据权利要求4所述的一种使用3d线激光传感器的深度处理方法的点胶设备,其特征在于,所述3d线扫传感器(12)包括3d结构光扫设备、存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至3任一项所述的3d线激光传感器的深度处理方法。
技术总结
本发明公开了一种3D线激光传感器的深度处理方法及点胶设备,涉及3D图像处理领域,其具体的处理步骤为:使用3D传感器对物体进行3D扫描得到物体的多帧数据;对物体的多帧数据进行处理调整;对物体进行单点坐标赋值并进行编号;保存中得到的深度图和映射表;所述点胶机包括底座,所述底座上表面固定连接有Y轴运动轨,所述Y轴运动轨上滑动连接有扫描载台,所述扫描载台上方设置有有3D线扫传感器以及点胶器,本发明的优点在于:解决了不同3D线扫传感器下转换深度算法不通用的问题,提升系统适应性;不依赖3D数据的有序性,具备2D
技术研发人员:杨沛 殷强 顾昕程
受保护的技术使用者:苏州小蜂视觉科技有限公司
技术研发日:2021.06.03
技术公布日:2021/10/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
