1.本公开涉及一种显示控制系统中所含的组件的设定画面的技术。
背景技术:
2.在生产现场,使生产工序自动化的工厂自动化(factory automation,fa)的控制系统正在普及。控制系统包含各种工业用的组件。组件例如包含用于移动工件的移动平台、用于搬送工件的输送器、或用于将工件移动到预先规定的目标场所的机械臂等。这些组件是由可编程逻辑控制器(programmable logic controller,plc)或机器人控制器等予以控制。
3.与plc连接的信息处理装置(例如个人计算机(personal computer,pc))受理用户操作,进行包含一个或多个组件的控制系统的构建以及设定。信息处理装置例如显示通过用户操作而选择的设定画面而受理设定。
4.作为在信息处理装置中构建控制系统的技术的一例,日本专利特开2016
‑
091066号公报(专利文献1)公开了:“支持装置对数据进行分类,从经层级管理的群组的名称中检索符合输入字符的检索群组名,并将所述检索群组名跟所述检索群组名的群组的母群组的名称一同予以显示”。
5.现有技术文献
6.专利文献
7.专利文献1:日本专利特开2016
‑
091066号公报
技术实现要素:
8.发明所要解决的问题
9.此外,当控制系统中所含的组件的数量增加时,各组件彼此的连接关系或设定的对应关系变得复杂。因此,信息处理装置在从用户受理了组件的选择时,提取与所述所选择的组件以及跟所选择的组件相关的其他组件的至少任一者的每个设定类别(category)的设定相关的内容耗时耗力。
10.本公开是鉴于所述实际情况而想出,公开一种技术,能够容易地提取与所选择的组件以及跟所选择的组件相关的其他组件的至少任一者的每个设定类别的设定相关的内容。
11.解决问题的技术手段
12.本公开的一例中,一种信息处理装置,用于进行包含一个或多个组件的控制系统的构建以及设定,所述信息处理装置包括:受理部,受理作为对象的所述控制系统中所含的一个或多个组件、以及组件间的电性或机械连接关系的指定;设定画面处理部,选择性地显示设定画面,所述设定画面用于受理针对依据所述指定而构建的所述控制系统中所含的各组件的设定,且是按照组件以及按照设定类别而准备;参照条项(item)处理部,显示多个参照条项,所述参照条项与任一个所述设定画面相对应,并且用于根据用户的设定来选择性
地显示所述相对应的设定画面;以及汇总处理部,当所述多个参照条项中的第一参照条项受到选择时,复制包含与第二设定画面相对应的第二参照条项和与第三设定画面相对应的第三参照条项中的至少一者的、一个或多个参照条项而汇总显示,所述第二设定画面属于跟与所述受到选择的第一参照条项相对应的第一设定画面设为设定对象的组件相关的其他设定类别,所述第三设定画面是将跟与所述受到选择的第一参照条项相对应的所述第一设定画面设为设定对象的组件电性或机械连接的其他组件设为设定对象。
13.根据本公开,信息处理装置能够容易地提取与某参照条项相关的其他参照条项。
14.本公开的一例中,所述多个参照条项是按照与各参照条项相对应的所述设定画面所属的设定类别而配置。
15.根据本公开,信息处理装置按照设定类别来配置参照条项,由此,能够将同种的参照条项统一显示在一个设定类别中。
16.本公开的一例中,所述汇总处理部复制与属于跟所述其他组件相关的所述其他设定类别的所述设定画面相对应的参照条项而汇总显示。
17.根据本公开,信息处理装置能够无遗漏地复制与受到选择的参照条项相关的所有参照条项。
18.本公开的一例中,所述汇总处理部复制与属于其他设定类别的所述设定画面相对应的参照条项而汇总显示,所述其他设定类别跟与包含所述受到选择的第一参照条项的设定类别所关联的设备相同的设备关联。
19.根据本公开,信息处理装置能够仅将包含与受到选择的参照条项相关的参照条项的设定类别作为参照条项的提取对象,实现提取时间的进一步的缩短。
20.本公开的一例中,所述汇总处理部基于在跟与所述受到选择的参照条项相对应的所述设定画面上所设定的设定值相同的设定画面上设定的其他设定值,复制与设定了所述其他设定值的其他设定画面相对应的参照条项而汇总显示。
21.根据本公开,信息处理装置能够仅提取与受到选择的参照条项具有相关性的参照条项。
22.本公开的一例中,一种信息处理方法,用于进行包含一个或多个组件的控制系统的构建以及设定,所述信息处理方法包括下述步骤:受理作为对象的所述控制系统中所含的一个或多个组件、以及组件间的电性或机械连接关系的指定;选择性地显示设定画面,所述设定画面用于受理针对依据所述指定而构建的所述控制系统中所含的各组件的设定,且是按照组件以及按照设定类别而准备;显示多个参照条项,所述参照条项与任一个所述设定画面相对应,并且用于根据用户的设定来选择性地显示所述相对应的设定画面;以及当所述多个参照条项中的第一参照条项受到选择时,复制包含与第二设定画面相对应的第二参照条项和与第三设定画面相对应的第三参照条项中的至少一者的、一个或多个参照条项而汇总显示,所述第二设定画面属于跟与所述受到选择的第一参照条项相对应的第一设定画面设为设定对象的所述组件相关的其他设定类别,所述第三设定画面是将跟与所述受到选择的第一参照条项相对应的所述第一设定画面设为设定对象的组件电性或机械连接的其他组件设为设定对象。
23.根据本公开,信息处理方法能够容易地提取与某参照条项相关的其他参照条项。
24.本公开的一例中,一种信息处理程序,使计算机作为信息处理装置发挥功能而进
行包含一个或多个组件的控制系统的构建以及设定,所述信息处理程序使所述计算机执行下述步骤:受理作为对象的所述控制系统中所含的一个或多个组件、以及组件间的电性或机械连接关系的指定;选择性地显示设定画面,所述设定画面用于受理针对依据所述指定而构建的所述控制系统中所含的各组件的设定,且是按照组件以及按照设定类别而准备;显示多个参照条项,所述参照条项与任一个所述设定画面相对应,并且用于根据用户的设定来选择性地显示所述相对应的设定画面;以及当所述多个参照条项中的第一参照条项受到选择时,复制包含与第二设定画面相对应的第二参照条项和与第三设定画面相对应的第三参照条项中的至少一者的、一个或多个参照条项而汇总显示,所述第二设定画面属于跟与所述受到选择的第一参照条项相对应的第一设定画面设为设定对象的所述组件相关的其他设定类别,所述第三设定画面是将跟与所述受到选择的第一参照条项相对应的所述第一设定画面设为设定对象的组件电性或机械连接的其他组件设为设定对象。
25.根据本公开,信息处理程序能够容易地提取与某参照条项相关的其他参照条项。
26.发明的效果
27.根据本公开,在一方面,能够容易地提取与受到选择的组件以及与受到选择的组件相关的其他组件的至少任一者中的每个设定类别的设定相关的内容。
附图说明
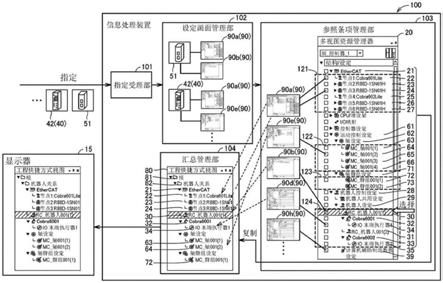
28.图1是对信息处理装置100的结构例进行说明的图。
29.图2是例示控制系统110中的组件间的电性或机械连接的图。
30.图3是表示与具有相关性的参照条项对应的组件的图。
31.图4是表示信息处理装置100的硬件结构的图。
32.图5是对组件间的连接关系的指定进行说明的图。
33.图6是表示包含机器人设定画面90b的第二显示画面112的图。
34.图7是表示包含机器人详细设定画面90c的第三显示画面113的图。
35.图8是表示包含末端执行器设定画面90d的第四显示画面114的图。
36.图9是表示包含轴设定画面90e的第五显示画面115的图。
37.图10是表示包含轴群组设定画面90f的第六显示画面116的图。
38.图11是对参照条项的选择的受理进行说明的图。
39.图12是表示对复制到psv80内的参照条项进行汇总显示的示例的图。
40.图13是对处理器2所执行的汇总显示处理进行说明的流程图。
41.图14是表示mve20中所含的设定类别、参照条项与代码20a的对应关系的图。
42.图15是将代码20a的内容放大表示的图。
43.图16是表示用于显示mve20中所含的多个设定类别的代码的一例的图。
44.图17是说明从根(root)的参照条项中提取相关的其他参照条项的图。
具体实施方式
45.以下,参照附图来说明本发明的实施方式。以下的说明中,对于相同的零件标注相同的符号。它们的名称以及功能也相同。因此,不再重复关于它们的详细说明。
46.<适用例>
47.参照图1~图3来说明本发明的适用例。图1是对信息处理装置100的结构例进行说明的图。本实施方式中,信息处理装置100进行包含一个或多个组件的控制系统的构建以及设定。信息处理装置100包含指定受理部101、设定画面管理部102、参照条项管理部103以及汇总管理部104。信息处理装置100是通过后述的处理器(例如图4所示的处理器2)执行后述的控制程序(例如图4所示的控制程序9)来实现这些功能。控制程序9被预先存储在后述的存储装置(例如图4所示的存储装置5)中。
48.指定受理部101通过用户操作来受理控制系统中所含的一个或多个组件以及组件间的电性或机械连接关系的指定。
49.图2是例示控制系统110中的组件间的电性或机械连接的图。参照图2,控制系统110包含信息处理装置100、作为控制器的一例的可编程逻辑控制器(programmable logic controller,plc)200、控制机器人501的机器人控制器300以及伺服驱动器401、402、403、404。信息处理装置100例如包含个人计算机(personal computer,pc)、平板终端等终端装置。伺服驱动器401、402、403、404(以下也总称作“伺服驱动器400”)驱动对应的伺服马达505a、505b、505c、505d(以下也总称作“伺服马达505”)。
50.另外,在生产现场,有时会构建控制系统110来作为将与组件对应的实机组合而成的系统。信息处理装置100也可受理由实机所构建的控制系统110中的组件的连接关系等的指定。而且,信息处理装置100也可受理未由实机构建控制系统110的结构的状态下的组件的连接关系等的指定。以下,作为一例,以未由实机构建控制系统110的结构的状态为前提,来进行包含连接关系等的各处理的说明。
51.plc200执行所设计的程序,依据执行的结果来对机器人控制器300或伺服驱动器400分别给予目标值,由此来对包含机器人501a、501b(以下也总称作“机器人501”)、设于所述机器人501的末端执行器502a、502b(以下也总称作“末端执行器502”)以及载台503a、503b(以下也总称作“载台503”)的对象进行控制。
52.在plc200,连接有机器人控制器300以及伺服驱动器400。plc200、机器人控制器300以及伺服驱动器400经由网络nw而以菊链连接。对于网络nw,例如采用ethercat(注册商标)。但是,网络nw并不限定于ethercat,可采用任意的通信部件。而且,连接形态并不限定于所述菊链,也可为树型连接或星型连接之类的其他连接形态。
53.机器人501与载台503一边相互联动,一边使工件w移动。另外,机器人501与载台503的相互联动并不限定于工件w的移动。机器人501与载台503的相互联动例如也可为载台503上的机器人501对工件w的加工。
54.载台503通过机器人501受到驱动,从而其举动在正交的x轴、y轴以及z轴的三维空间内发生变化。通过载台503受到驱动,从而其举动在与机器人控制器300相同的三维空间内中受到规定,尤其是在x轴以及y轴的平面内中受到规定。
55.机器人控制器300对机器人501的伺服马达(未图示)与末端执行器502的伺服马达(未图示)进行驱动。在伺服马达的旋转轴配置有编码器(未图示)。所述编码器将伺服马达的位置(旋转角度)、旋转速度、累积圈数等作为伺服马达的反馈值而输出至机器人控制器300。
56.同样,伺服驱动器400驱动载台503的伺服马达505。在伺服马达505的旋转轴配置有编码器(未图示)。所述编码器将伺服马达的位置(旋转角度)、旋转速度、累积圈数等作为
伺服马达505的反馈值而输出至伺服驱动器400。
57.再次参照图1,信息处理装置100的指定受理部101通过使用键盘(例如图4所示的键盘12)对信息处理装置100的用户操作来受理组件的指定。更具体而言,信息处理装置100例如受理包含plc200、机器人控制器300、伺服驱动器400、机器人501及末端执行器502的组件以及这些组件间的电性或机械连接关系的指定。所受理的连接关系被显示于设定画面(例如图1所示的网络设定画面90a)。
58.指定受理部101例如受理用户操作对与机器人501a对应的机器人组件51和与伺服驱动器402对应的驱动器组件42的指定。更具体而言,如后述的图5所示的网络设定画面90a所示的那样,通过用户操作来指定机器人组件51以及机器人组件52与驱动器组件41~驱动器组件44。指定受理部101将所受理的指定输出至设定画面管理部102。
59.设定画面管理部102例如显示第一显示画面111中所含的网络设定画面90a。以下,网络设定画面90a与其他设定画面(例如机器人详细设定画面90c以及轴设定画面90e等)也总称作“设定画面90”。设定画面管理部102选择性地显示设定画面90,所述设定画面90用于受理针对依据指定而构建的控制系统110中所含的各组件的设定,且是按照组件以及按照设定类别而准备。
60.设定画面管理部102例如与图2所示的跟机器人501a对应的机器人组件51相对应地显示网络设定画面90a与机器人设定画面90b。设定画面管理部102例如与图2所示的跟伺服驱动器402对应的驱动器组件42相对应地显示网络设定画面90a与轴设定画面90e。像这样将多个设定画面对应于各组件,是因为机器人501a与伺服驱动器402被设在同一网络nw内,且具有用于设定节点地址的设定画面(例如网络设定画面90a)。而且,在节点地址的设定以外将设定画面对应于各组件,是因为具有用于进行各组件自身的设定的设定画面。例如,网络设定画面90a为节点地址的设定画面。与此相对,机器人设定画面90b以及轴设定画面90e是用于组件自身的设定的设定画面。
61.接下来,参照条项管理部103显示多个参照条项,所述参照条项与任一个设定画面90相对应,并且用于根据用户的设定来选择性地显示所述相对应的设定画面90。
62.『参照条项』是与包含跟设定画面90相关的设定值群的文件相对应。参照条项也作为相对应的文件的快捷方式(shortcut)发挥功能。而且,也能对同一文件设置多个参照条项。参照条项被显示于后述的显示器(例如图4所示的显示器15)。当通过用户操作而受理对某参照条项的指定时,所述文件受到参照,设定画面90被显示于显示器15。参照条项也可显示为图标或与图标类似的图像对象物。
63.参照条项被包含在多个设定类别中的任一个设定类别内。设定类别和与所述设定类别相对应的参照条项被包含在多视图资源管理器(multi view explorer)20(以下称作“mve20”)内。更具体而言,多个设定类别是按照与各参照条项相对应的设定画面90所属的设定类别而设在mve20内。信息处理装置100通过按照设定类别来设置参照条项,从而能够将同种的参照条项汇总显示在一个设定类别内。
64.在mve20中,例如包含网络设定类别21、运动控制设定类别61、轴设定类别62、轴群组设定类别71、机器人控制设定类别28以及机器人设定类别29等。这些设定类别中的例如网络设定类别21对应于“ethercat”。
65.各设定类别例如包含多个参照条项。更具体而言,网络设定类别21包含节点
(node)1参照条项22~节点6参照条项27。运动控制设定类别61中的轴(axis)设定类别62包含轴001参照条项63~轴004参照条项66。运动控制设定类别61中的轴群组设定类别71包含群组(group)001参照条项72以及群组002参照条项73。
66.进而,机器人控制设定类别28中的机器人设定类别29包含机器人(robot)001参照条项30及机器人002参照条项31、cobra6001参照条项32以及cobra6002参照条项33、以及末端执行器(endeffector)1参照条项34及末端执行器1参照条项35。
67.并且,参照条项管理部103将设定画面管理部102所生成的设定画面90对应于设定类别内的参照条项。参照条项管理部103例如将网络设定画面90a对应于节点1参照条项22或节点3参照条项24。参照条项管理部103例如将机器人设定画面90b对应于机器人001参照条项30。参照条项管理部103例如将末端执行器设定画面90d对应于末端执行器1参照条项34。参照条项管理部103例如将轴设定画面90e对应于轴002参照条项64。而且,参照条项管理部103例如将计算机辅助制造(computer aided manufacturing,cam)数据设定画面90h对应于计算机辅助制造数据设定参照条项39。
68.汇总管理部104在参照条项管理部103所对应的参照条项中的任一个参照条项受到选择时,复制与所述受到选择的参照条项相关的参照条项。由此,能够对同一文件设置多个参照条项。另外,参照条项的选择如上所述,例如是通过使用键盘12的用户操作来进行。
69.汇总管理部104复制与第二设定画面相对应的第二参照条项,所述第二设定画面属于跟与受到选择的第一参照条项相对应的第一设定画面设为设定对象的组件相关的其他设定类别。更具体而言,汇总管理部104例如在机器人001参照条项30受到选择的情况下,复制跟与所述受到选择的参照条项相对应的机器人设定画面90b设为设定对象的机器人组件51相关的其他设定类别的参照条项。汇总管理部104例如复制与属于网络设定类别21的网络设定画面90a相对应的节点1参照条项22。
70.而且,汇总管理部104复制与第三设定画面相对应的第三参照条项,所述第三设定画面是将跟与受到选择的第一参照条项相对应的第一设定画面设为设定对象的组件电性或机械连接的其他组件设为设定对象。更具体而言,汇总管理部104例如在机器人001参照条项30受到选择时,复制与下述设定画面相对应的参照条项,所述设定画面是将跟与受到选择的参照条项相对应的机器人设定画面90b设为设定对象的机器人组件51电性或机械连接的组件设为设定对象。汇总管理部104例如复制与后述的设定画面相对应的末端执行器1参照条项34,所述设定画面是将与机器人组件51电性或机械连接的末端执行器502a的组件设为设定对象。设定画面例如为末端执行器设定画面90d。
71.汇总管理部104复制被显示于mve20的参照条项中的一个或多个参照条项而汇总显示。汇总管理部104例如在工程快捷方式视图(project shortcut view)80(以下也称作“psv80”)内的根(root)文件夹81的下位生成机器人关系(robotrelation)文件夹82。所述文件夹82的生成例如是通过使用键盘12的用户操作而进行。汇总管理部104受理用户操作而生成机器人关系文件夹82。所复制的各参照条项被保存在所述机器人关系文件夹82内。
72.更具体而言,汇总管理部104复制第一参照条项群组121中的、与受到选择的第一参照条项即机器人001参照条项30相关的参照条项。第一参照条项群组121包含节点1参照条项22~节点6参照条项27。汇总管理部104复制第一参照条项群组121中的例如节点1参照条项22~节点3参照条项24。
73.汇总管理部104复制第二参照条项群组122中的与机器人001参照条项30相关的参照条项。第二参照条项群组122包含轴001参照条项63~轴004参照条项66。汇总管理部104复制第二参照条项群组122中的例如轴001参照条项63以及轴002参照条项64。
74.汇总管理部104复制第三参照条项群组123中的与机器人001参照条项30相关的参照条项。第三参照条项群组123包含群组001参照条项72以及群组002参照条项73。汇总管理部104复制第二参照条项群组122中的例如群组001参照条项72。
75.汇总管理部104复制第四参照条项群组124中的与机器人001参照条项30相关的参照条项。第四参照条项群组124包含机器人001参照条项30及机器人002参照条项31、cobra6001参照条项32及cobra6002参照条项33、以及末端执行器1参照条项34及末端执行器2参照条项35。汇总管理部104复制第四参照条项群组124中的机器人001参照条项30、cobra6001参照条项32以及末端执行器1参照条项34。由此,信息处理装置100能够容易地提取与某参照条项相关的其他参照条项。
76.另外,本实施方式的汇总管理部104不复制与计算机辅助制造数据设定画面90h相对应的计算机辅助制造数据设定参照条项39。计算机辅助制造数据设定参照条项39对于与机器人001参照条项30相关的第二参照条项以及第三参照条项均不符合,因此不成为复制对象。但是,本实施方式中,对于不复制计算机辅助制造数据设定参照条项39,是作为用于说明多个参照条项中与某参照条项不相关的参照条项不成为复制对象的例示而列举。因此,在计算机辅助制造数据设定参照条项39与某参照条项相关的情况下,可将所述计算机辅助制造数据设定参照条项39作为复制对象。而且,也能够不将与某参照条项不相关的其他参照条项作为复制对象。
77.而且,若以组件的观点来表示所述受到复制的参照条项,则例如图3所示的组件成为对象。图3是表示与具有相关性的参照条项对应的组件的图。图3的结构是表示与所述图2相同的结构的图。参照图3,具有相关性的对象组件是包含在范围141内的组件。更具体而言,通过机器人001参照条项30受到选择,从而在对象组件中包含跟与所述参照条项的机器人设定画面90b相对应的机器人组件51对应的机器人501a、利用网络nw而与所述机器人501a连接的机器人控制器300、伺服驱动器401以及伺服驱动器402。而且,在对象组件中包含与机器人501a电性或机械连接的末端执行器502a。
78.此处,汇总管理部104所进行的所述复制包含与设定画面90相对应的参照条项的复制,所述设定画面90属于与其他组件相关的其他设定类别。更具体而言,汇总管理部104例如复制与驱动器组件41的设定画面90相对应的轴001参照条项63,所述驱动器组件41与经由网络nw连接于机器人501a的其他组件即伺服驱动器401对应。轴001参照条项63是属于与节点2参照条项23所属的设定类别不同的设定类别的参照条项,所述节点2参照条项23与网络设定画面90a相对应。而且,汇总管理部104例如复制与驱动器组件42的轴设定画面90e相对应的轴002参照条项64,所述驱动器组件42与经由网络nw连接于机器人501a的伺服驱动器402对应。轴002参照条项64是属于与节点3参照条项24所属的设定类别不同的设定类别的参照条项,所述节点3参照条项24与网络设定画面90a相对应。由此,信息处理装置100能够无遗漏地复制与受到选择的参照条项相关的所有参照条项。
79.汇总管理部104将所复制的多个参照条项汇总显示于显示器15。另外,在机器人001参照条项30受到选择的情况下,与其他机器人相关的组件的参照条项不包含在复制对
象中。例如,利用网络nw连接于与机器人组件52对应的机器人501b但未利用网络nw连接于机器人501a的伺服驱动器403和伺服驱动器404不包含在复制对象中。而且,与机器人501b电性或机械连接但未与机器人501a电性或机械连接的末端执行器502b不包含在复制对象中。
80.<第一实施方式>
81.[信息处理装置100的硬件结构]
[0082]
图4是表示信息处理装置100的硬件结构的图。信息处理装置100例如离线(offline)地执行控制系统110的模拟。信息处理装置100典型的是包含通用的计算机。信息处理装置100例如是便携性优异的笔记型的个人计算机。信息处理装置100包含处理器2、保存基本输入输出系统(basic input output system,bios)或各种数据的只读存储器(read only memory,rom)3、随机存取存储器(random access memory,ram)4以及存储装置5。
[0083]
处理器2读出保存在存储装置5中的控制程序9,并在随机存取存储器(random access memory,ram)4中展开所述控制程序9。处理器2作为指定受理部101、设定画面管理部102、参照条项管理部103以及汇总管理部104发挥功能。另外,以下,对通过处理器2执行程序而实现所需的处理的结构例进行说明,但这些提供的处理的一部分或全部也可使用专用的硬件电路(例如专用集成电路(application specific integrated circuit,asic)或现场可编程门阵列(field programmable gate array,fpga)等)来安装。
[0084]
存储装置5非易失性地保存由处理器2所执行的程序等。存储装置5例如是硬盘以及固态硬盘(solid state drive,ssd)等非易失性的设备,保持用于实现处理器2所执行的各种功能的控制程序9。
[0085]
信息处理装置100还包含通信接口6、输入/输出(input/output,i/o)接口7、读写器(reader/writer,r/w)设备8、键盘12以及显示器15。
[0086]
通信接口6是供信息处理装置100与包含plc200的外部机器进行通信的接口。
[0087]
i/o接口7是对信息处理装置100的输入或来自信息处理装置100的输出的接口。i/o接口7连接于键盘12与显示器15,受理用户操作键盘12而输入的信息。
[0088]
r/w(读写器)设备8装卸自如地安装外部的存储介质13,对所安装的存储介质读写程序及/或数据。
[0089]
键盘12受理来自用户的、包含针对信息处理装置100的指示的输入。为了受理所述输入,信息处理装置100也可包含鼠标等其他设备。以下,键盘12与鼠标也总称作输入部。
[0090]
显示器15输出信息处理装置100的处理结果。显示器15包含液晶显示器(liquid crystal display,lcd)或有机电致发光(electro luminescence,el)显示器,显示依据从信息处理装置100输出的影像信号或图像信号的影像或图像。显示器15例如显示图5所示的第一显示图像111等。
[0091]
[组件间的连接关系的指定]
[0092]
图5是对组件间的连接关系的指定进行说明的图。参照图5,指定受理部101将第一显示画面111显示于显示器15,受理组件的指定。组件的指定是通过用户对输入部的操作来进行。更具体而言,指定受理部101受理与网络设定类别21中所含的节点1参照条项22~节点6参照条项27对应的组件、以及这些组件间的电性或机械连接关系的指定。另外,第一显示画面111中所含的设备设定10表示设定连接关系的对象设备。换言之,设备设定10是对成
为组件间的连接关系中的最上位的设备进行决定的项目。所述设备可通过用户操作的输入部的操作来切换。例如,图5所示的新_控制器1(new_controller1)表示所设定的设备为机器人控制器300。
[0093]
当指定受理部101受理指定时,设定画面管理部102将按照组件以及按照设定类别而准备的设定画面选择性地显示于显示器15。当通过用户对输入部的操作而选择了任一个参照条项或组件时,设定画面管理部102将包含所述组件的设定的项目名91和设定值92的网络设定画面90a显示于显示器15。例如当节点3参照条项24受到选择时,设定画面管理部102将包含项目名91和设定值92的网络设定画面90a显示于显示器15。项目名91例如包含驱动器组件42的“设备名”以及“序列号”等。设定值92例如包含与“设备名”对应的“e003”以及与“节点地址”对应的“3”等。另外,“节点地址”表示网络nw上的各组件的地址。
[0094]
设定画面管理部102在与网络设定画面90a内的项目名91以及设定值92的画面不同的画面(例如邻接的画面)上,将与机器人501a对应的机器人组件51和与机器人501b对应的机器人组件52关联于与机器人控制器300对应的组件301而显示于显示器15。
[0095]
更具体而言,设定画面管理部102在所述其他画面上,将与伺服驱动器401对应的驱动器组件41和与伺服驱动器402对应的驱动器组件42关联于机器人组件51而显示于显示器15。机器人组件51对应于机器人501a。设定画面管理部102将与伺服驱动器403对应的驱动器组件43和与伺服驱动器404对应的驱动器组件44关联于机器人组件52而显示于显示器15。机器人组件52对应于机器人501b。
[0096]
参照条项管理部103例如在mve20的网络设定类别21的下位显示节点1参照条项22~节点6参照条项27。参照条项管理部103例如将网络设定画面90a对应于节点1参照条项22~节点6参照条项27,根据用户的设定而选择性地显示于显示器15。
[0097]
[机器人设定画面90b]
[0098]
图6是表示包含机器人设定画面90b的第二显示画面112的图。参照图6,指定受理部101将第二显示画面112显示于显示器15,受理通过用户对输入部的操作所进行的组件的指定。更具体而言,指定受理部101受理与机器人控制设定类别28的下位的机器人设定类别29中所含的机器人001参照条项30以及机器人002参照条项31各自对应的组件、以及这些组件间的电性或机械连接关系的指定。另外,机器人设定画面90b是与机器人001参照条项30相对应。
[0099]
设定画面管理部102将包含项目名91和设定值92的机器人设定画面90b显示于显示器15。项目名91包含与机器人501a对应的组件的“机器人编号”以及“机器人分配”等。设定值92包含与“机器人编号”对应的“1”以及与“机器人分配”对应的“节点1”等。通过对机器人分配”设定“节点1”,从而对与“机器人编号”为“1”的机器人501a对应的机器人组件51设定地址“节点1”。
[0100]
参照条项管理部103例如将机器人001参照条项30与机器人002参照条项31显示在机器人设定类别29的下位。参照条项管理部103将机器人设定画面90b对应于机器人001参照条项30而选择性地显示于显示器15。机器人设定画面90b被包含在第二显示画面112中。参照条项管理部103例如将与机器人设定画面90b不同的其他设定画面对应于机器人002参照条项31而选择性地显示于显示器15。
[0101]
[机器人详细设定画面90c]
[0102]
图7是表示包含机器人详细设定画面90c的第三显示画面113的图。参照图7,指定受理部101将第三显示画面113显示于显示器15,受理通过用户对输入部的操作所进行的组件的指定。另外,机器人详细设定画面90c是与cobra6001参照条项32相对应。
[0103]
指定受理部101受理与cobra6001参照条项32以及cobra6002参照条项33各自对应的组件、以及这些组件间的电性或机械连接关系的指定。cobra6001参照条项32以及cobra6002参照条项33被包含在机器人本体设定类别36中。另外,图7中,设备设定10的内容由新_控制器1变更为机器人设置(robotsetting)。这表示:设备由机器人控制器300变更为机器人501,例如机器人501被设定为最上位的设备。
[0104]
设定画面管理部102根据用户操作,将包含与机器人501a对应的组件的“机器人编号”的项目名91和包含与“机器人编号”对应的“1”的设定值92显示于显示器15。
[0105]
参照条项管理部103例如将cobra6001参照条项32和cobra6002参照条项33显示于机器人本体设定类别36的下位。参照条项管理部103将机器人详细设定画面90c对应于机器人001参照条项30而选择性地显示于显示器15。机器人详细设定画面90c被包含在第三显示画面113中。参照条项管理部103例如将与机器人详细设定画面90c不同的其他设定画面对应于cobra6002参照条项33而选择性地显示于显示器15。
[0106]
另外,在cobra6001参照条项32的下位,显示末端执行器1参照条项34。而且,在cobra6002参照条项33的下位,显示末端执行器2参照条项35。末端执行器1参照条项34是与末端执行器502a对应的组件的参照条项,所述末端执行器502a与跟机器人501a对应的组件具有电性或机械连接关系。末端执行器2参照条项35是与末端执行器502b对应的组件的参照条项,所述末端执行器502b与跟机器人501b对应的组件具有电性或机械连接关系。
[0107]
图8是表示包含末端执行器设定画面90d的第四显示画面114的图。参照图8,指定受理部101将第四显示画面114显示于显示器15,受理通过用户对输入部的操作所进行的组件的指定。另外,末端执行器设定画面90d是与末端执行器1参照条项34相对应。
[0108]
指定受理部101受理与末端执行器1参照条项34对应的组件、与末端执行器2参照条项35对应的组件、以及这些组件间的电性或机械连接关系的指定。末端执行器1参照条项34被设在cobra6001参照条项32的下位。末端执行器2参照条项35被设在cobra6002参照条项33的下位。
[0109]
设定画面管理部102将与末端执行器1参照条项34对应的设定值93的“前端1”显示于显示器15。而且,设定画面管理部102将与末端执行器2参照条项35对应的设定值93的“前端2”显示于显示器15。由此,例如进行机器人501a的机器人编号“1”、与电性或机械连接于所述机器人501a的末端执行器502a的设定值“前端1”的对应。而且,例如进行机器人501b的机器人编号“2”、与电性或机械连接于所述机器人501b的末端执行器502b的设定值“前端2”的对应。
[0110]
[轴设定画面90e]
[0111]
图9是表示包含轴设定画面90e的第五显示画面115的图。参照图9,指定受理部101将第五显示画面115显示于显示器15,受理通过用户对输入部的操作所进行的组件的指定。另外,轴设定画面90e是与轴002参照条项64相对应。
[0112]
指定受理部101受理与轴设定类别62中所含的轴001参照条项63~轴004参照条项66各自对应的组件、以及这些组件间的电性或机械连接关系的指定。轴设定类别62是被设
在运动控制设定类别61的下位的类别。
[0113]
设定画面管理部102将项目名91与设定值92显示于显示器15。项目名91例如包含与轴002参照条项64对应的组件的“轴编号”以及“输出设备1”。设定值92例如包含与“轴编号”对应的“2”以及与“输出设备1”对应的“节点3”。通过对“输出设备1”设定“节点3”,从而对与“轴编号”为“2”的伺服驱动器402对应的驱动器组件42设定地址“节点3”。
[0114]
参照条项管理部103例如将轴001参照条项63~轴004参照条项66显示于轴设定类别62的下位。参照条项管理部103将轴设定画面90e对应于轴002参照条项64而选择性地显示于显示器15。轴设定画面90e被包含在第五显示画面115中。参照条项管理部103将与轴设定画面90e不同的其他设定画面分别对应于其他的参照条项63、65及66而选择性地显示于显示器15。
[0115]
[轴群组设定画面90f]
[0116]
图10是表示包含轴群组设定画面90f的第六显示画面116的图。参照图10,指定受理部101将第六显示画面116显示于显示器15,受理通过用户对输入部的操作所进行的组件的指定。另外,轴群组设定画面90f是与群组001参照条项72相对应。
[0117]
指定受理部101受理与群组001参照条项72以及群组002参照条项73各自对应的组件、以及这些组件间的电性或机械连接关系的指定。群组001参照条项72以及群组002参照条项73被包含在轴群组设定类别71中。
[0118]
设定画面管理部102将项目名91与设定值92显示于显示器15。项目名91例如包含与群组001参照条项72对应的组件的“轴群组编号”以及“构成轴”。设定值92例如包含与“轴群组编号”对应的“1”和与“构成轴”对应的“轴001”以及“轴002”。通过将“轴001”以及“轴002”设定为“构成轴”,从而对驱动器组件41与驱动器组件42设定轴群组编号“1”。驱动器组件41对应于对“轴编号”设定了“1”的伺服驱动器401。驱动器组件42对应于对“轴编号”设定了“2”的伺服驱动器402。
[0119]
参照条项管理部103例如将群组001参照条项72以及群组002参照条项73显示于轴群组设定类别71的下位。参照条项管理部103将轴群组设定画面90f对应于群组001参照条项72而选择性地显示于显示器15。轴群组设定画面90f被包含在第六显示画面116中。参照条项管理部103将与轴群组设定画面90f不同的其他设定画面对应于其他群组002参照条项73而选择性地显示于显示器15。
[0120]
[汇总处理]
[0121]
接下来说明汇总管理部104复制参照条项而汇总显示。汇总管理部104受理参照条项管理部103对应于设定画面90的参照条项中的、通过用户操作所进行的任一参照条项的选择。
[0122]
图11是对参照条项的选择的受理进行说明的图。参照图11,汇总管理部104通过用户对输入部的操作,来受理例如轴002参照条项64的选择。而且,汇总管理部104受理用户对输入部的操作,在psv80的根文件夹81的下位生成机器人关系文件夹82。
[0123]
当通过用户对输入部的操作而选择了选择画面801所示的添加关系数据(addrelationdata),而执行与添加关系数据相关的处理时,汇总管理部104复制与属于其他设定类别的设定画面相对应的参照条项,所述其他设定类别跟将与受到选择的参照条项相对应的设定画面90设为设定对象的组件相关。例如,受到选择的参照条项为轴002参照条
项64,与所述参照条项相对应的设定画面为轴设定画面90e。其他设定类别为网络设定类别21,汇总管理部104复制与属于所述网络设定类别21的网络设定画面90a相对应的节点3参照条项24。
[0124]
而且,汇总管理部104复制与机器人设定画面90b相对应的机器人001参照条项30,所述机器人设定画面90b将与驱动器组件42电性或机械连接的机器人组件51设为设定对象。驱动器组件42是与受到选择的轴002参照条项64相对应的轴设定画面90e设为设定对象的组件。
[0125]
图12是表示对复制到psv80内的参照条项进行汇总显示的示例的图。汇总管理部104对所复制的参照条项进行汇总显示。更具体而言,汇总管理部104将与受到选择的参照条项相关的各参照条项复制到机器人关系文件夹82内而汇总显示。换言之,汇总管理部104将包含设定画面90的文件的路径的参照条项保存到机器人关系文件夹82内。
[0126]
通过轴002参照条项64受到选择,从而汇总管理部104例如复制节点1参照条项22~节点3参照条项24而汇总显示。而且,通过轴002参照条项64受到选择,从而汇总管理部104例如复制机器人参照条项30、cobra6001参照条项32、末端执行器1参照条项34而汇总显示。进而,通过轴002参照条项64受到选择,从而汇总管理部104例如复制轴001参照条项63以及群组001参照条项72而汇总显示。由此,信息处理装置100能够容易地提取与受到选择的组件以及跟受到选择的组件相关的其他组件的至少任一者的每个设定类别的设定相关的内容。更具体而言,信息处理装置100能够容易地提取与某参照条项相关的其他参照条项。因此,信息处理装置100使用户的作业时间缩短。
[0127]
[信息处理装置100的处理流程]
[0128]
参照图13来说明信息处理装置100中的处理器2的控制结构。图13的控制例如是通过处理器2执行控制程序9而实现。图13是对处理器2所执行的汇总显示处理进行说明的流程图。步骤s105中,处理器2受理一个或多个组件以及组件间的电性或机械连接关系的指定。处理器2选择性地显示设定画面90,所述设定画面90用于受理针对依据指定而构建的控制系统中所含的各组件的设定,且是按照组件以及按照设定类别而准备。
[0129]
步骤s110中,处理器2显示多个参照条项,所述参照条项与任一个设定画面90相对应,并且用于根据用户的设定来选择性地显示所述相对应的设定画面90。
[0130]
步骤s115中,处理器2判定是否通过用户对输入部的操作而选择了第一参照条项。若第一参照条项受到了选择(步骤s115中为是),则处理器2将控制切换至步骤s120。若并非如此(步骤s115中为否),则处理器2结束本流程图的处理。
[0131]
步骤s120中,处理器2基于第一参照条项所属的设定类别来提取其他设定类别。此处,使用图14~图16来说明其他设定类别的提取方法。
[0132]
图14是表示mve20中所含的设定类别、参照条项与代码20a的对应关系的图。参照图14,代码20a呈层级结构,例如将代码311设为最上位,在所述代码311的下位设有代码312。而且,在代码312的下位,以相同的层级设有代码313、代码314、代码315以及代码316。这些代码例如是利用可扩展标记语言(extensible markup language,xml)而记述,但只要是可实现mve20中所含的设定类别或参照条项的语言,则也可用xml以外的语言来记述。
[0133]
mve20中所含的运动控制设定类别61、轴设定类别62以及轴001参照条项63~轴004参照条项66分别对应于代码20a中所含的代码311~代码316的任一个。更具体而言,运
动控制设定类别61对应于代码311。轴设定类别62对应于代码312。轴001参照条项63对应于代码313。轴002参照条项64对应于代码314。轴003参照条项65对应于代码315。轴004参照条项66对应于代码316。
[0134]
另外,与运动控制设定类别61对应的代码311和与轴设定类别62对应的代码312是预先规定的代码。与此相对,与成为轴设定类别62的下位的轴001参照条项63~轴004参照条项66对应的代码313~代码315是基于用户对组件连接关系的指定等而生成的代码。而且,在代码20a中,表示了与mve20中所含的一部分设定类别以及一部分参照条项对应的代码,但关于mve20中所含的其他设定类别以及其他参照条项,也分别通过xml等的代码来记述。所记述的各代码的关系呈层级结构。并且,其他类别也与运动控制设定类别61同样为预先规定的代码。而且,其他参照条项是基于用户对组件连接关系的指定等而生成的代码。
[0135]
图15是将代码20a的内容放大表示的图。参照图15,当通过用户使用输入部的操作而选择了轴002参照条项64时,处理器2提取较代码314为上位的层级的设定类别。更具体而言,处理器2按照较代码314为上位的代码313、代码312、代码311的顺序进行检索,提取与最上位的代码311对应的运动控制设定类别61。
[0136]
接下来,处理器2提取与运动控制设定类别61为相同层级的其他设定类别。更具体而言,处理器2提取与运动控制设定类别61为相同层级的网络设定类别21以及机器人控制设定类别28等。
[0137]
图16是表示用于显示mve20中所含的多个设定类别的代码的一例的图。代码20b是用于显示mve20中所含的多个设定类别的代码。处理器2基于与代码20b内的运动控制设定类别61的代码311为相同层级的网络设定类别21的代码321或机器人控制设定类别28的代码311,来提取这些设定类别。代码20b中所含的多个设定类别例如是针对每个设备而预先规定。
[0138]
当通过用户对输入部的操作而选择了一个参照条项时,处理器2提取跟与所述参照条项所属的设定类别所关联的设备相同的设备关联的其他设定类别。另外,图16中的设备是与设备设定10中所示的新_控制器1对应的机器人控制器300。因此,网络设定类别21、运动控制设定类别61以及机器人控制设定类别28为与机器人控制器300关联的类别。
[0139]
例如在提取了网络设定类别21的情况下,处理器2复制所述网络设定类别21中所含的一个或多个参照条项中的、与受到选择的轴002参照条项64相关的参照条项而汇总显示。而且,例如在提取了机器人控制设定类别28的情况下,处理器2复制所述机器人控制设定类别28中所含的一个或多个参照条项中的、与受到选择的轴002参照条项64相关的参照条项而汇总显示。
[0140]
这样,处理器2复制与属于其他设定类别的设定画面90相对应的参照条项而汇总显示,所述其他设定类别与跟包含受到选择的第一参照条项的设定类别所关联的设备相同的设备相关联。即,信息处理装置100在详查各参照条项的对应关系之前,通过设定类别的名称来缩小成为提取参照条项的对象的设定类别。由此,信息处理装置100能够仅将包含与受到选择的参照条项相关的参照条项的设定类别设为参照条项的提取对象,从而能够更容易地提取参照条项。
[0141]
步骤s125中,处理器2从所提取的第二参照条项以及第三参照条项中,导出层级结构中的预先规定的作为根的参照条项。预先规定的作为根的参照条项是符合某条件的参照
条项,通过改变条件,能够变更作为根的参照条项。处理器2例如将与轴002参照条项64对应的伺服驱动器402的节点3参照条项24的上位的节点1参照条项22导出为根的参照条项。
[0142]
步骤s130中,处理器2从根的参照条项中提取相关的其他参照条项。更具体而言,处理器2基于在与跟受到选择的参照条项相对应的设定画面90上设定的设定值相同的设定画面90上所设定的其他设定值,复制与设定了所述其他设定值的其他设定画面90相对应的参照条项而汇总显示。由此,信息处理装置100能够仅提取与受到选择的参照条项具有相关性的参照条项。另外,作为提取对象的具有相关性的参照条项是包含在所述图16所示的设定类别中的参照条项。
[0143]
图17是说明从根的参照条项提取相关的其他参照条项的图。处理器2在网络设定画面90a中搜索与对机器人组件51设定的地址“节点1”的设定值92a相对应的其他设定值。网络设定画面90a与节点1参照条项22相对应。节点1参照条项22被包含在网络设定类别21中。处理器2在机器人设定画面90b中导出机器人编号“1”的设定值92b。其结果,处理器2提取与网络设定画面90a相对应的节点1参照条项22和与机器人设定画面90b相对应的机器人001参照条项30。机器人001参照条项30被包含在机器人控制设定类别28的下位的机器人设定类别29中。
[0144]
接下来,处理器2预先进行对应,以使“机器人编号1”的机器人501a与伺服驱动器401以及伺服驱动器402同步地运行,由此,在轴群组设定画面90f中导出“轴群组编号1”的设定值92c。而且,处理器2搜索与“轴群组编号1”的设定值92c相对应的其他设定值。处理器2在包含轴设定画面90e的第五显示画面115中导出“轴编号1”的设定值92d以及“轴编号2”的设定值92e。其结果,处理器2提取与轴群组设定画面90f相对应的群组001参照条项72、以及与包含轴设定画面90e的第五显示画面115相对应的轴001参照条项63和轴002参照条项64。群组001参照条项72被包含在位于运动控制设定类别61的下位的轴群组设定类别71中。轴001参照条项63与轴002参照条项64被包含在位于运动控制设定类别61的下位的轴设定类别62中。
[0145]
进而,处理器2搜索与“轴编号1”的设定值92d相对应的其他设定值。而且,处理器2搜索与“轴编号2”的设定值92e相对应的其他设定值。处理器2在网络设定画面90a中导出地址“节点2”的设定值92f以及地址“节点3”的设定值92g。其结果,处理器2提取与网络设定画面90a相对应的节点2参照条项23和节点3参照条项24。节点2参照条项23以及节点3参照条项24被包含在网络设定类别21中。
[0146]
再次参照图13,在步骤s135中,处理器2复制属于mve20的各设定类别的多个参照条项中的所提取的参照条项而汇总显示于显示器15。
[0147]
<变形例>
[0148]
本实施方式中,设受到选择的第一参照条项为机器人001参照条项72或轴002参照条项64而进行了说明。与此相对,受到选择的第一参照条项也可为所述两个参照条项以外的其他参照条项。
[0149]
本实施方式中,设受到选择的第一参照条项为一个参照条项而进行了说明。与此相对,第一参照条项也可为多个参照条项。
[0150]
本实施方式中,设处理器2将节点1参照条项22~节点6参照条项27对应于一个网络设定画面90a而进行了说明。与此相对,处理器2也可将节点1参照条项22~节点6参照条
项27对应于不同的设定画面90。
[0151]
本实施方式中,对代码20b中所含的多个设定类别例如是针对每个设备而预先规定的情况进行了说明。与此相对,代码20b中所含的多个设定类别也可在多个设备中预先规定。例如,代码20b中所含的多个设定类别也可跨及机器人控制器300与机器人501而预先规定。
[0152]
<附注>
[0153]
如上所述,本实施方式包含如下所述的公开。
[0154]
[结构1]
[0155]
一种信息处理装置(100),用于进行包含一个或多个组件的控制系统(110)的构建以及设定,所述信息处理装置(100)包括:
[0156]
受理部(101),受理作为对象的所述控制系统(110)中所含的一个或多个组件、以及组件间的电性或机械连接关系的指定;
[0157]
设定画面处理部(102),选择性地显示设定画面(90),所述设定画面(90)用于受理针对依据所述指定而构建的所述控制系统(110)中所含的各组件的设定,且是按照组件以及按照设定类别而准备;
[0158]
参照条项处理部(103),显示多个参照条项,所述参照条项与任一个所述设定画面(90)相对应,并且用于根据用户的设定来选择性地显示所述相对应的设定画面(90);以及
[0159]
汇总处理部(104),当所述多个参照条项中的第一参照条项受到选择时,复制包含与第二设定画面相对应的第二参照条项和与第三设定画面相对应的第三参照条项中的至少一者的、一个或多个参照条项而汇总显示,所述第二设定画面属于跟与所述受到选择的第一参照条项相对应的第一设定画面设为设定对象的组件相关的其他设定类别,所述第三设定画面是将跟与所述受到选择的第一参照条项相对应的所述第一设定画面设为设定对象的组件电性或机械连接的其他组件设为设定对象。
[0160]
[结构2]
[0161]
根据结构1所述的信息处理装置,其中
[0162]
所述多个参照条项是按照与各参照条项相对应的所述设定画面(90)所属的设定类别而配置。
[0163]
[结构3]
[0164]
根据结构1或2所述的信息处理装置,其中
[0165]
所述汇总处理部(104)复制与属于跟所述其他组件相关的所述其他设定类别的所述设定画面(90)相对应的参照条项而汇总显示。
[0166]
[结构4]
[0167]
根据结构1至3中任一项所述的信息处理装置,其中
[0168]
所述汇总处理部(104)复制与属于其他设定类别的所述设定画面(90)相对应的参照条项而汇总显示,所述其他设定类别跟与包含所述受到选择的第一参照条项的设定类别所关联的设备相同的设备关联。
[0169]
[结构5]
[0170]
根据结构1至4中任一项所述的信息处理装置,其中
[0171]
所述汇总处理部(104)基于在跟与所述受到选择的参照条项相对应的所述设定画
面(90)上设定的设定值相同的设定画面(90)上所设定的其他设定值,复制与设定了所述其他设定值的其他设定画面(90)相对应的参照条项而汇总显示。
[0172]
[结构6]
[0173]
一种信息处理方法,用于进行包含一个或多个组件的控制系统(110)的构建以及设定,所述信息处理方法包括:
[0174]
步骤(s105),受理作为对象的所述控制系统(110)中所含的一个或多个组件、以及组件间的电性或机械连接关系的指定;
[0175]
步骤(s105),选择性地显示设定画面(90),所述设定画面(90)用于受理针对依据所述指定而构建的所述控制系统(110)中所含的各组件的设定,且是按照组件以及按照设定类别而准备;
[0176]
步骤(s110),显示多个参照条项,所述参照条项与任一个所述设定画面(90)相对应,并且用于根据用户的设定来选择性地显示所述相对应的设定画面(90);以及
[0177]
步骤(s135),当所述多个参照条项中的第一参照条项受到选择时,复制包含与第二设定画面相对应的第二参照条项和与第三设定画面相对应的第三参照条项中的至少一者的、一个或多个参照条项而汇总显示,所述第二设定画面属于跟与所述受到选择的第一参照条项相对应的第一设定画面设为设定对象的所述组件相关的其他设定类别,所述第三设定画面是将跟与所述受到选择的第一参照条项相对应的所述第一设定画面设为设定对象的组件电性或机械连接的其他组件设为设定对象。
[0178]
[结构7]
[0179]
一种信息处理程序,使计算机作为信息处理装置(100)发挥功能而进行包含一个或多个组件的控制系统(110)的构建以及设定,
[0180]
所述信息处理程序使所述计算机执行:
[0181]
步骤(s105),受理作为对象的所述控制系统(110)中所含的一个或多个组件、以及组件间的电性或机械连接关系的指定;
[0182]
步骤(s105),选择性地显示设定画面,所述设定画面用于受理针对依据所述指定而构建的所述控制系统中所含的各组件的设定,且是按照组件以及按照设定类别而准备;
[0183]
步骤(s110),显示多个参照条项,所述参照条项与任一个所述设定画面(90)相对应,并且用于根据用户的设定来选择性地显示所述相对应的设定画面(90);以及
[0184]
步骤(s135),当所述多个参照条项中的第一参照条项受到选择时,复制包含与第二设定画面相对应的第二参照条项和与第三设定画面相对应的第三参照条项中的至少一者的、一个或多个参照条项而汇总显示,所述第二设定画面属于跟与所述受到选择的第一参照条项相对应的第一设定画面设为设定对象的所述组件相关的其他设定类别,所述第三设定画面是将跟与所述受到选择的第一参照条项相对应的所述第一设定画面设为设定对象的组件电性或机械连接的其他组件设为设定对象。
[0185]
应认为,此次公开的实施方式在所有方面仅为例示而非限制者。本发明的范围是由权利要求而非所述说明所示,且意图包含与权利要求均等的含义及范围内的所有变更。
[0186]
符号的说明
[0187]
2:处理器
[0188]
4:ram
[0189]
5:存储装置
[0190]
6:通信接口
[0191]
7:i/o接口
[0192]
8:r/w设备
[0193]
9:控制程序
[0194]
10:设备设定
[0195]
12:键盘
[0196]
13:存储介质
[0197]
15:显示器
[0198]
20:多视图资源管理器
[0199]
21:网络设定类别
[0200]
28:机器人控制设定类别
[0201]
29:机器人设定类别
[0202]
36:机器人本体设定类别
[0203]
39:计算机辅助制造数据设定参照条项
[0204]
41、42、43、44:驱动器组件
[0205]
51、52:机器人组件
[0206]
61:运动控制设定类别
[0207]
62:轴设定类别
[0208]
71:轴群组设定类别
[0209]
80:工程快捷方式视图
[0210]
90a:网络设定画面
[0211]
90b:机器人设定画面
[0212]
90c:机器人详细设定画面
[0213]
90d:末端执行器设定画面
[0214]
90e:轴设定画面
[0215]
90f:轴群组设定画面
[0216]
90h:计算机辅助制造数据设定画面
[0217]
91:项目名
[0218]
92:设定值
[0219]
100:信息处理装置
[0220]
101:指定受理部
[0221]
102:设定画面管理部
[0222]
103:参照条项管理部
[0223]
104:汇总管理部
[0224]
110:控制系统
[0225]
111:第一显示画面
[0226]
112:第二显示画面
[0227]
113:第三显示画面
[0228]
114:第四显示画面
[0229]
115:第五显示画面
[0230]
116:第六显示画面
[0231]
121:第一参照条项群组
[0232]
122:第二参照条项群组
[0233]
123:第三参照条项群组
[0234]
124:第四参照条项群组
[0235]
141:范围
[0236]
300:机器人控制器
[0237]
311、312、313、314、315、321、331:代码
[0238]
400、401、402、403、404:伺服驱动器
[0239]
501、501a、501b:机器人
[0240]
502、502a、502b:末端执行器
[0241]
503、503a、503b:载台
[0242]
505、505a、505b、505c、505d:伺服马达
[0243]
801:执行画面
[0244]
nw:网络
[0245]
w:工件
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
