1.本发明属于机器人感知与规划技术领域。具体涉及一种巡逻机器人执行追踪任务时的主动隐藏方法。
背景技术:
2.因安保人员数量有限,且监控系统存在盲区等问题,安保巡逻机器人被越来越多的应用到公共安全或厂区巡检等任务中。然而,目前使用的安保巡逻机器人普遍缺乏主动自我保护的意识,极易在任务执行的过程中被追踪目标发现,导致巡逻任务失败;甚至巡逻机器人在暴露后,遭到不法分子的破坏,导致高额的经济财产损失。
3.自然界中的许多高等哺乳动物均可以利用环境中的颜色、纹理、亮度、遮挡物等因素隐藏自己,降低被侦测对象发现或被捕食的几率。如果将动物的这种隐藏行为映射到巡逻安保机器人的行为逻辑中,安排巡逻安保机器人在目标追踪过程中根据所处环境执行主动隐藏行为,则可以降低巡逻安保机器人被发现的几率,提高追踪任务成功率。
技术实现要素:
4.针对现有技术的不足,本发明提出了一种巡逻机器人执行追踪任务时的主动隐藏方法,通过监测所处复杂环境中的可隐蔽地貌,帮助安保巡逻机器人在执行追踪、巡逻的过程中,借助感知到的可隐蔽地貌规划躲藏动作,实现对可疑目标的隐蔽跟踪,降低巡逻机器人被发现、破坏的概率,解决安保巡逻机器人在任务执行过程中缺乏自我保护措施的问题。
5.一种巡逻机器人执行追踪任务时的主动隐藏方法,具体包括以下步骤:
6.步骤1、目标区域获取
7.利用巡逻机器人上的深度相机采集当前环境的rgb图像和深度图像,将得到的rgb图像转化为灰度图像,调整灰度图像的宽度和高度分别为w和h,计算其中每个像素点的水平梯度和垂直梯度,进一步计算梯度幅值和方向,然后将灰度图像分割为若干个大小为8*8的cell单元,计算每个cell单元的梯度直方图,按照梯度方向对每个cell单元中的梯度幅值进行分组后,然后以4个cell单元为一个块,对每个块内的梯度幅值进行归一化处理,然后使用滑动扫描窗,得到特征向量后输入到svm分类器中,实现目标区域和背景区域的分类,然后将目标区域压缩成大小为k*l的roi区域。
8.步骤2、隐藏地貌检测
9.使用可分离卷积替代unet网络中的解码部分,建立隐藏地貌检测网络,输入步骤1拍摄的rgb图像,隐藏地貌检测网络输出尺寸与输入图像相同的预测图像,通过预测图像得到当前环境的隐藏地貌区域。
10.步骤3、目标检测器训练
11.将步骤1得到的roi区域作为初始跟踪区域,获取初始帧t
t
中的目标样本x=[x0,x1,x2,
…
,x
n
‑1],通过循环矩阵对样本进行循环位移处理得到训练样本x:
[0012][0013]
对训练样本x中的每个元素x
i
赋予对应的标签y
i
,构造训练集(x
i
,y
i
),获取误差最小的回归函数f(x)=ω
t
x,其中ω为列向量表示权重系数,上标t标识转置。构造误差函数:
[0014][0015]
其中λ为正则化函数。引入映射函数将ω映射为:
[0016][0017]
其中α
i
为系数。
[0018]
引入核函数可以得到进而得到系数α
i
形成的向量α,α=(k λi)
‑1y,利用循环矩阵的性质和傅里叶变换,得到频域中的最小二乘解,完成目标监测器的训练:
[0019][0020]
其中,为α的傅里叶变换,y为训练样本y
i
组成的列向量,是y的傅里叶变换,为核函数k(x
i
,x
j
)中的第一行元素。
[0021]
根据训练后的目标监测器,求取当前样本图像z的相关性最大结果,得到跟踪结果,实现对roi区域的跟踪:
[0022][0023]
其中,为相关性结果,为循环矩阵,
⊙
表示频域像素点乘运算。
[0024]
步骤4、隐藏动作执行
[0025]
对步骤2得到的隐藏地貌区域结果进行灰度化处理,并获取巡逻机器人底盘可行驶地貌的像素值p
road
,设置巡逻机器人的前视距离为l
v
,并获取对应的图像坐标系中的纵坐标y
t
,遍历所有纵坐标为y
t
的像素点,记录像素值为p
road
的可行驶像素点,然后分别统计位于中垂线左侧和右侧的可隐藏像素点个数l
counts
和r
counts
,计算偏置误差err
target
:
[0026]
err
target
=(l
counts
r
counts
)*0.8
ꢀꢀꢀ
(6)
[0027]
计算巡航像素误差err作为pid控制策略的输入量:
[0028]
err=l
counts
‑
r
counts
‑
err
target
ꢀꢀꢀ
(7)
[0029]
多次调整比例参数k
p
和微分参数k
d
,以调整输出量output:
[0030]
output=k
p
*err k
d
*(err
‑
err
last
)
ꢀꢀꢀ
(8)
[0031]
将输出量output作为巡逻机器人的角速度控制指令,并以稳定的线速度控制机器人沿着隐蔽地貌区域的边界行驶,执行隐藏动作。
[0032]
步骤5、跟踪距离控制
[0033]
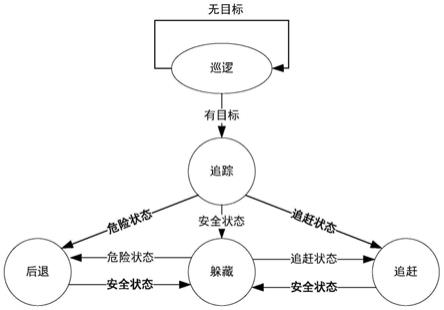
选取roi区域中的若干个像素点,根据深度图像对这些像素点的深度信息进行阈值均值滤波处理,获取可疑目标与巡逻机器人间的距离d,巡逻机器人根据与可疑目标间的距离d判断当前所处的状态,并执行对应的动作。具体为:当d∈(0,d
lower
)为危险状态,执行后退动作;d∈[d
lower
,d
upper
]为安全状态,执行隐藏动作;d∈(d
lower
,d
upper
)为追赶状态,执行追赶动作。
[0034]
本发明具有以下有益效果:
[0035]
1、对梯度值分组后再进行归一化处理,可以消除光照等外部因素的影响,提高目标区域与背景区域的分类准确性。
[0036]
2、使用可分离卷积替代传统unet网络的解码部分,可以减少网络的参数量,提高检测实时性。
[0037]
3、基于视觉感知可疑目标和可隐蔽地貌,对感知的可隐蔽地貌和可疑目标信息进行融合后,规划巡逻跟踪动作,实现了主动隐藏,降低了机器人在巡检过程中被发现的概率。
附图说明
[0038]
图1为巡逻机器人结构框图;
[0039]
图2为实施例中巡逻跟踪动作决策图;
[0040]
图3为隐蔽地貌检测示意图。
具体实施方式
[0041]
以下结合附图对本发明作进一步的解释说明;
[0042]
本实施例采用p3
‑
dx先锋机器人和realsense d435i深度相机搭建实验平台,机器人结构框图如图1所示,启动计算机系统,运行相关节点,巡逻机器人开始执行躲藏巡逻任务,具体巡逻策略如图2所示:
[0043]
步骤1、目标区域获取
[0044]
利用巡逻机器人上的深度相机采集当前环境图像的rgb图像和深度图像,将得到的rgb图像转化为灰度图像,调整灰度图像的大小为64*128,计算其中每个像素点(x,y)的水平梯度与垂直梯度g
x
(x,y)、g
y
(x,y):
[0045][0046]
其中,i(x,y)为像素点(x,y)的灰度值;然后计算每个像素点的梯度幅值g(x,y)和方向θ(x,y):
[0047]
[0048]
其中θ(x,y)∈[0,180]。
[0049]
然后将灰度图像分割为若干个大小为8*8的cell单元,计算每个cell单元的梯度直方图,其中梯度直方图的y轴为梯度幅值,x轴为梯度方向,将x轴以20为间隔单位,分为9个bin,对应梯度方向范围为[0,20)、[20,40)、[40,60)...[160,180],将一个cell单元中每个像素点的梯度幅值分别归入对应的bin中,例如:点(x1,y1)的梯度方向为40,梯度幅值为2,则向第3个bin[40,60)中添加2;点(x2,y2)的梯度方向为50,梯度幅值为1,则分别向第3个bin[40,60)和第4个bin[60,80)中添加0.5;点(x3,y3)的梯度方向为170,梯度幅值为2,则分别向第1个bin[0,20)和第9个bin[160,180)中添加0.5。
[0050]
将4个cell单元作为一个块,对每个块内的梯度幅值进行归一化处理,以消除光照等因素的影响。使用步长为8个像素的滑动扫描窗扫描归一化处理后图像,得到4*9*7*15=3780维的特征向量后,然后输入到svm分类器中,实现目标区域和背景区域的分类,然后将目标区域压缩成大小为k*l的roi区域。
[0051]
步骤2、隐藏地貌检测
[0052]
使用可分离卷积替代unet网络中的解码部分,建立隐藏地貌检测网络,输入大小为240*320的rgb图像,隐藏地貌检测网络对其进行4次下采样操作,分别得到4个特征层f1、f2、f3、f4,然后再依次对4个特征层进行上采样与融合处理,将f3与上采样一次后的f4融合得到新特征图o1,对o1上采样后与f2融合得到o2,再将o2上采样后与f1融合,最终输出一张尺寸与输入图片相同的预测图,通过预测图像得到当前环境的隐藏地貌区域。
[0053]
步骤3、目标检测器训练
[0054]
将步骤1得到的roi区域作为初始的跟踪区域,获取初始帧t
t
中的目标样本x=[x0,x1,x2,
…
,x
n
‑1],通过循环矩阵对样本进行循环位移处理得到训练样本x:
[0055][0056]
对训练样本x中的每个元素x
i
赋予对应的标签y
i
,构造训练集(x
i
,y
i
),获取误差最小的回归函数f(x)=ω
t
x,其中ω为列向量表示权重系数,上标t标识转置。构造误差函数:
[0057][0058]
其中λ为正则化函数,用于防止过拟合。对于误差函数这个非线性问题,需要引入映射函数将ω映射为:
[0059][0060]
其中α
i
为系数。
[0061]
引入核函数可以得到将求解ω转化为求解α,可得α=(k λi)
‑1y,可以利用循环矩阵的性质和傅里叶变换,得到频域中的最小二乘解,完成目标监测器的训练:
[0062][0063]
其中,为α的傅里叶变换,α为系数α
i
形成的向量,y是由训练样本y
i
组成的列向量,是y的傅里叶变换,为核函数k(x
i
,x
j
)中的第一行元素。
[0064]
根据训练后的目标监测器,求取当前样本图像z的相关性最大结果,得到跟踪结果:
[0065][0066]
其中,为相关性结果,为循环矩阵,
⊙
表示频域像素点乘运算。
[0067]
循环计算,即可实现对roi区域的跟踪,可以提高检测的准确性和实时性。
[0068]
步骤4、隐藏动作执行
[0069]
对巡逻机器人进行迷彩装饰,并通过pid策略实现机器人运动控制。对步骤2得到的隐藏地貌区域结果进行灰度化处理,并获取巡逻机器人底盘可行驶地貌的像素值p
road
,如图3所示,设置巡逻机器人的前视距离为l
v
,并获取对应的图像坐标系中的纵坐标y
t
,遍历所有纵坐标为y
t
的像素点,记录像素值为p
road
的可行驶像素点,然后分别统计位于中垂线左侧和右侧的可隐藏像素点个数l
counts
和r
counts
,计算偏置误差err
target
:
[0070]
err
target
=(l
counts
r
counts
)*0.8
ꢀꢀꢀ
(6)
[0071]
计算巡航像素误差err作为pid控制策略的输入量:
[0072]
err=l
counts
‑
r
counts
‑
err
target
ꢀꢀꢀ
(7)
[0073]
多次调整比例参数k
p
和微分参数k
d
,以调整输出量output:
[0074]
output=k
p
*err k
d
*(err
‑
err
last
)
ꢀꢀꢀ
(8)
[0075]
将输出量output作为巡逻机器人的角速度控制指令,并以稳定的线速度控制机器人沿着隐蔽地貌区域的边界行驶,执行隐藏动作。
[0076]
步骤5、跟踪距离控制
[0077]
选取roi区域中的(k/2,l/2)、(k/3,l/3)、(2k/3,l/3)、(k/3,2l/3)、(2k/3,2l/3)这5个像素点,根据深度图像中的深度信息进行可疑目标与巡逻机器人间距离的计算:
[0078][0079]
其中,d
m
为第m个点的深度信息,m=1,2...5,0<d
m
<10。
[0080]
d为可疑目标与巡逻机器人间的距离。巡逻机器人根据与可疑目标间的距离d判断当初所处的状态,并执行对应的动作。具体为:当d∈(0,d
lower
)为危险状态,执行后退动作;d∈[d
lower
,d
upper
]为安全状态,执行隐藏动作;d∈(d
lower
,d
upper
)为追赶状态,执行追赶动作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
