1.本发明涉及电池储能系统检测技术领域,具体为一种电池储能系统故障状态自适应预警方法。
背景技术:
2.电池储能系统(battery energy storage system,bess)遇到的安全问题大都来自于电芯单体层面,主要包括过充电、过放电、内部短路与外部短路,在以往的bess故障预警中,无论是通过建立精确电热仿真模型实现的参数估计法还是基于经验估计法实现的阈值限定法,都仅是对bess运行过程中的异常数据进行识别,非常依赖正常数据起到参考修正作用,而忽略正常电池循环过程中的观测误差与过程噪声。但是大容量电池储能设备一般由成百上千个电芯单体串并联而成,配合电池箱工作的监测单元也多达几十个,不同监测单元针对不同电池箱进行异步测量,所获取的异源数据间往往存在很大的观测误差和过程噪声,并且不同监测单元记录得到的采样时间轴与电池循环过程也不相同,数据间很难进行比对,这些因素对bess故障识别精度所造成的影响不可忽视。
3.大容量bess通常会进行电池分区,视需求不同协调各分区的电池箱采取不同的充放电策略,比如部分电池箱进行深充深放以满足电厂调峰填谷需求,同一时间其余电池箱则可能工作于浅充浅放形式来抑制用户谐波,解决电能质量问题;同一电池箱在充放电的不同阶段也有着完全不同的工作形式,充电初期与后期可能以涓流充电来保护电池安全,而在中期则采用高倍率快速充电,不同时期的电压、电流曲线存在很大差异。基于监测单元实测数据的故障识别方法要达到足够的识别精度,就必须跳出实验室环境,设法解决实际工作中不同电池分区电池箱在不同循环阶段的异步数据不匹配问题。
4.首先,现有方法在进行bess故障状态预警时,不同电池箱监测单元的异源数据观测误差和过程噪声一般被直接忽略或者按照同源噪声进行处理,还没有文献对异源数据的匹配方法进行深入研究。实际的bms(battery management system电池管理系统)监测数据和理论研究表明,不同监测单元记录得到的数据序列时间轴往往是异步的,很难直接进行比对,因此,在bess故障状态预警时如果忽视异源数据的不匹配性,那么故障预警将很可能出现误判。
5.其次,现有技术在基于监测单元实测数据实现故障识别时,通常是根据电池类型直接限定充放电策略和电池循环形式。而工业过程使用的大容量bess一般在各分区的电池箱采取不同的充放电策略,同一电池箱在充放电的不同阶段也有着完全不同的工作形式。如果不对监测数据做特征提取和时间轴规整,设法解决实际工作中不同电池分区电池箱在不同循环阶段的异步数据不匹配问题,故障状态预警就很容易出现不同程度的欠估计或过估计,使得bess故障状态预警不能反映出对储能设备的真实安全状态。
6.另外,现有数据在通过故障聚类进行异常数据辨识时,往往采用距离法直接确定故障数据,然而故障点的聚类距离阈值一般通过经验估计给出,存在很大的偶然性,一旦聚类点集划定得过大或过小,就很容易导致故障预警的误报。
7.术语解释:
8.电池储能系统:将电池作为能量储存载体,以成百上千个电芯单体组合而成,存储电能和供应电能的储能系统,一般包含起储能作用的电池柜和起监测调控作用的控制柜两部分。
9.电池管理系统:电池管理系统是一套对储能电池安全及运行状态进行监控与控制的系统,电池管理系统将监测的电池信息保存、处理并实时反馈给用户,根据采集的信息调控各项参数,保护电池可靠稳定运行。
10.njw谱聚类算法:一种谱聚类算法,通过监测数据相似矩阵获取对应的拉普拉斯矩阵,选取前若干个最大特征值对应的特征向量作为原数据一一对应的替代矩阵,然后对其按行进行聚类。
11.动态时间规整算法(dynamic time warping,dtw):一种通过弯曲监测数据时间轴来比较异步时间序列相似度,并且对异步时间序列进行动态归整的算法。
技术实现要素:
12.针对上述问题,本发明的目的在于提供一种电池储能系统故障状态自适应预警方法,基于njw谱聚类算法处理异源数据,将相似工况,可做故障状态比对的电池箱进行归类,利用动态规整算法解决异步数据时间轴不一致问题,构建滑动窗口模型以抑制监测数据中少量离群点的影响,基于dtw距离进行聚类分析,通过稀疏系数和故障阈值客观选定故障聚类点,实现bess故障状态自适应预警。技术方案如下:
13.一种电池储能系统故障状态自适应预警方法,包括以下步骤:
14.步骤1:运用njw聚类算法将高维的电池箱监测数据进行降维,通过构建异源数据的拉式矩阵来获取其安全特征标准矩阵,再以安全特征标准矩阵唯一替代电池箱目标监测参数原始数据进行聚类分析;
15.步骤2:通过动态时间规整算法规整安全特征标准矩阵的时间轴,将两组监测数据映射到同步时间轴上,来比较异步监测数据相似程度;
16.步骤3:构建滑动窗口模型以抑制监测数据中少量离群点的影响,基于dtw距离进行聚类分析,通过稀疏系数lsr和故障阈值ft客观选定故障聚类点,进而确定故障电池箱。
17.进一步的,所述步骤1具体包括以下步骤:
18.步骤1.1:设电池管理系统监测电池箱目标监测参数为v,获取m组电池箱监测数据,每组数据包含有n个取样点,将待聚类监测数据表示为:
19.u={u1,u2,
…
,u
n
}∈v
m
20.步骤1.2:提取电池箱监测数据构造相似度矩阵w={w
ij
∣i≤m,j≤n}∈v
n
×
n
如下:
[0021][0022]
其中,u
i
和u
j
表示两个异源的电池箱目标监测数据;σ
i
和σ
j
为自适应识别参数,σ
i
是电池箱目标监测参数u
i
与其余监测数据中欧氏距离最小的r个取样点平均值,σ
j
是电池箱目标监测参数u
j
与其余监测数据中欧氏距离最小的r个取样点平均值;
[0023]
步骤1.3:根据相似度矩阵w计算得到度量矩阵d={d
ij
∣i≤m,j≤n}∈v
n
×
n
:
[0024][0025]
步骤1.4:由相似度矩阵w和度量矩阵d计算得到拉氏矩阵l:
[0026][0027]
步骤1.5:计算拉式矩阵l对应的特征值及特征向量,降序排列各特征值及特征向量,取前k个特征向量形成安全特征矩阵s=[s1,s2,
…
,s
k
]∈v
n
×
k
中,对安全特征矩阵s逐行归一化,形成安全特征标准矩阵y={y
ij
∣i≤m,j≤n}∈v
n
×
k
:
[0028][0029]
式中,s
ij
为s矩阵第i行j列元素;
[0030]
步骤1.6:全特征标准矩阵y的每一行对应一个电池箱目标监测参数序列,唯一替代原始采样数据。
[0031]
更进一步的,所述步骤2具体包括以下步骤:
[0032]
步骤2.1:设安全特征标准矩阵y中,两个异步的电池箱a、b对应监测数据特征向量分别为y
a
={y
a1
,y
a2
,
…
,y
an
}和y
b
={y
b1
,y
b2
,
…
,y
bn
},n为安全特征标准矩阵每一行的样本点数,即每个电池箱监测数据包含的取样点的个数,求解得电池箱a、b的距离矩阵r={r
ij
∣i≤n,j≤n}:
[0033][0034]
min=min{r
i
‑
1,j
,r
i,j
‑1,r
i
‑
1,j
‑1}
[0035]
式中,d(y
ai
,y
bj
)为样本点y
ai
和y
bj
的欧氏距离;d(y
ai
,y
bj
) min为当前样本点与邻近各样本点的最小欧式距离之和;
[0036]
步骤2.2:形成距离矩阵之后,电池箱a、b的dtw距离为:
[0037]
dtw(y
a
,y
b
)=r
nn a,b≤m
[0038]
以同样的方式可以计算任意两个电池箱按照监测参数v度量的dtw距离,当a=b时,dtw距离为零。
[0039]
更进一步的,所述步骤3具体包括以下步骤:
[0040]
步骤3.1:将长度为d的滑动窗口,d<<n,置于待聚类监测数据u的起始位置t1,并随着njw
‑
dtw聚类算法的计算不断向后移动滑动增量为采样间隔时间q;计算并保存每个窗口中第a、b个电池箱的距离,直到形成第n
‑
d 1个长度为d的子序列;依此类推,总共得到n
‑
d 1个滑动窗口及对应的距离矩阵,表示为:
[0041]
dtw
j
={dtw1,dtw2,
…
,dtw
n
‑
d 1
}∈v
m
[0042]
故障状态发生在其中一个或多个时间窗口;
[0043]
步骤3.2:计算稀疏系数lsr
[0044]
将第a个电池箱的稀疏系数lsr(a)定义为该电池箱与其余距离k以内电池箱平均距离的倒数:
[0045][0046][0047]
式中,size(dtw
k
(y
a
))为电池箱a在距离k以内电池箱的个数;dtw(y
a
,y
b
)电池箱a与b在k距离内电池箱的实际距离;不失一般性,k距离取为最远dtw距离的一半;
[0048]
步骤3.3:将故障阈值ft定义为所有电池箱与其k距离内电池箱的平均距离的倒数:
[0049][0050]
步骤3.4:对所有m个电池箱的稀疏系数lsr(a)进行排列,并以故障阈值ft作为判断依据,将所有稀疏系数低于ft的电池箱认定为故障电池箱。
[0051]
更进一步的,所述电池箱目标监测参数为电池箱端电压、支路电流、电池温度、绝缘电阻或电池容量。
[0052]
本发明的有益效果是:
[0053]
1)本发明运用njw聚类算法将高维监测数据进行降维,通过构建异源数据的拉式矩阵来获取其特征向量,再以特征向量唯一替代原始数据进行聚类分析。njw谱聚类克服了传统方法对数据维度和序列长度的限制,解决了传统方法对非凸形数据聚类经常出现的奇异性问题;
[0054]
2)本发明利用dtw动态规整异步监测数据时间轴,将两组监测数据映射到同步时间轴上,克服了监测数据异步采样导致的观测误差,极大提高了聚类结果的准确性,解决了传统方法取样点异源数据时间轴无法一一对应的问题;
[0055]
3)本发明构建滑动窗口模型以抑制监测数据中少量离群点的影响,基于dtw距离进行聚类分析,通过稀疏系数lsr和故障阈值ft客观选定故障聚类点,避免了传统故障聚类方法对故障状态的过估计或欠估计,能够自动适应不同bess的参数与实际工况,实现bess故障状态自适应预警。
附图说明
[0056]
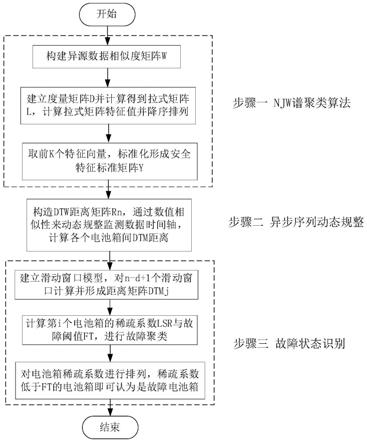
图1为本发明电池储能系统故障状态自适应预警方法的流程图。
[0057]
图2为异源数据在同一时间轴的循环曲线。
[0058]
图3为滑动窗口模型示意图。
[0059]
图4为故障聚类示意图。
具体实施方式
[0060]
下面结合附图和具体实施例对本发明做进一步详细说明。本发明技术方案主要分为三个大步骤,即异源数据聚类、异步序列动态规整和故障状态识别,流程图如图1所示,其中每个大步骤及其小步骤的详细阐述如下:
[0061]
一、异源数据njw谱聚类算法
[0062]
njw谱聚类算法是将高维异源数据进行降维聚类的算法,它通过构建异源数据的拉式矩阵来获取其特征向量,再以特征向量唯一替代原始数据进行聚类分析。njw谱聚类对数据维度没有限制,有效避免了异源非凸形经常出现的奇异性问题。本实施例以基于电池箱端电压的故障状态预警为例,其步骤如下(其余监测数据也有完全一致的计算步骤):
[0063]
1、设电池管理系统监测电池箱端电压为v,获取m组电池箱监测数据,每组数据包含有n个取样点,可将待聚类监测数据表示为:
[0064]
u={u1,u2,
…
,u
n
}∈v
m
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0065]
2、提取监测数据构造相似度矩阵w={w
ij
∣i≤m,j≤n}∈v
n
×
n
如下:
[0066][0067]
其中:u
i
和u
j
表示两个异源的电池箱端电压,σ为自适应识别参数。σ
i
是电池箱目标监测参数u
i
与其余监测数据中欧氏距离最小的r个取样点平均值,σ
j
是电池箱目标监测参数u
j
与其余监测数据中欧氏距离最小的r个取样点平均值,为保证聚类精确度,一般将r取为3~7。。
[0068]
3、根据相似度矩阵w计算得到度量矩阵d={d
ij
∣i≤m,j≤n}∈v
n
×
n
:
[0069][0070]
4、由相似度矩阵w和度量矩阵d计算得到拉氏矩阵l:
[0071][0072]
5、计算拉式矩阵l对应的特征值及特征向量,降序排列各特征值及特征向量,取前k个特征向量形成安全特征矩阵s=[s1,s2,
…
,s
k
]∈v
n
×
k
中,对s阵逐行归一化,形成安全特征标准矩阵y={y
ij
∣i≤m,j≤n}∈v
n
×
k
:
[0073][0074]
式中,s
ij
为s矩阵第i行j列元素。
[0075]
6、安全特征标准矩阵y的每一行对应一个电池箱端电压序列,可唯一替代原始采样数据。接下来对其进行动态时间规整聚类。
[0076]
二、动态时间规整算法
[0077]
如图2所示,实际工作中不同电池分区电池箱在不同循环阶段的获得的异步监测数据存在时间轴不匹配的问题。本发明将异源数据njw谱聚类算法用到的k均值聚类算法进
行了改进,将欧氏距离改进为dtw距离进行k均值聚类分析。dtw距离通过规整安全特征标准矩阵y的时间轴来比较异步监测数据相似程度,其步骤如下:
[0078]
1、设安全特征标准矩阵y中,两个异步的电池箱a、b对应监测数据特征向量分别为y
a
={y
a1
,y
a2
,
…
,y
an
}和y
b
={y
b1
,y
b2
,
…
,y
bn
},n为安全特征标准矩阵每一行的样本点数,即每组电池箱监测数据包含的取样点的个数,可解得电池箱a、b的距离矩阵r={r
ij
∣i≤n,j≤n}:
[0079][0080]
min=min{r
i
‑
1,j
,r
i,j
‑1,r
i
‑
1,j
‑1}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0081]
式中,d(y
ai
,y
bj
)为样本点y
ai
和y
bj
的欧氏距离;d(y
ai
,y
bj
) min为当前样本点与邻近各样本点的最小欧式距离之和;
[0082]
2、形成距离矩阵之后,电池箱a、b的dtw距离为
[0083]
dtw(y
a
,y
b
)=r
nn a,b≤m
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0084]
以同样的方式可以计算任意两个电池箱按照监测参数v度量的dtw距离,当a=b时,dtw距离为零。
[0085]
dtw法在njw安全特征标准矩阵y的基础上,通过找到两组监测数据的数值相似性来动态规整其中一个序列时间轴,避免了数据异步记录导致的观测误差,能够将两个序列映射到同步时间轴上,从而计算得到两个序列的相似度,极大提高了聚类结果的准确性,避免了传统方法取样点异源数据时间轴无法一一对应的缺点。
[0086]
三、故障状态识别算法
[0087]
为了在监测数据中找出故障异常数据,本发明基于njw
‑
dtw聚类算法提出故障状态的识别方法,其步骤如下,为了简化叙述,以下“距离”即指dtw距离:
[0088]
1、滑动窗口模型
[0089]
采用滑动窗口模型抑制监测数据中少量离群点的影响。bms监测电池箱端电压v获取m组电池箱监测数据,每组数据包含有n个取样点,可将待聚类监测数据表示为:u={u1,u2,
…
,u
n
}∈v
m
,1≤t≤n,将长度d(d<<n)的滑动窗口置于待聚类监测数据u的起始位置t1并随着njw
‑
dtw聚类算法的计算不断向后移动,滑动增量为采样间隔时间q,如图3所示。计算并保存每个窗口中第a,b个电池箱的距离,直到形成第n
‑
d 1个长度为d的子序列;依此类推,总共可以得到n
‑
d 1个滑动窗口及对应的距离矩阵,表示为:dtw
j
={dtw1,dtw2,
…
,dtw
n
‑
d 1
}∈v
m
,故障状态发生在其中一个或多个时间窗口。
[0090]
2、稀疏系数lsr(local sparsity ratio,lsr)
[0091]
将第a个电池箱的稀疏系数lsr(a)定义为该电池箱与其余距离k以内电池箱平均距离的倒数:
[0092][0093]
式中,size(dtw
k
(y
a
))为电池箱a在距离k以内电池箱的个数;dtw(y
a
,y
b
)电池箱a与b在k距离内电池箱的实际距离;不失一般性,k距离取为最远dtw距离的一半;
[0094]
稀疏系数lsr(i)反映了电池箱i周围所有电池箱的安全状态分布密度,局部稀疏系数越小,则电池箱i故障几率越大,反之亦然。
[0095]
将故障阈值ft(fault threshold,ft)定义为所有电池箱与其k距离内电池箱的平均距离的倒数:
[0096][0097]
如果电池箱i发生故障,则它的稀疏系数应该小于故障因子ft,因为此时电池箱i与其他电池箱的安全距离比其他所有电池箱都要更远。将所有稀疏系数lsr小于故障因子ft的电池箱作为侯选的故障电池箱,故障聚类如图4所示。
[0098]
3、故障状态识别
[0099]
对所有m个电池箱的稀疏系数lsr(a)进行排列,并以故障阈值ft作为判断依据,所有稀疏系数低于ft的电池箱即可认为是故障电池箱。
[0100]
本发明从异源监测数据出发,运用njw聚类算法对高维数据进行降维,提取监测数据特征向量,消除观测误差和过程噪声影响;利用dtw法对异步数据进行动态归整,解决异源数据不匹配问题;基于客观指标进行故障聚类分析,对不同系统具有很强的自适应性,从而能够客观地反映电池储能系统安全运行状态,准确发出故障预警。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
