1.本发明涉及工业数字测量领域,尤其涉及一种天车轨距测量的数据处理方法。
背景技术:
2.传统测量吊车轨距采用钢尺测量或者由全站仪进行测量,在采用全站仪测量过程中,直接使用钢尺分别从轨道一侧端头开始每两米标记一个测点的方式进行轨距测量,但是由于使用钢尺测量过程中的人为误差,及钢尺测量过程中本身误差较大,使得测量结果误差较大,且测量步骤较为繁琐。
技术实现要素:
3.本发明的目的是提供一种天车轨距测量的数据处理方法,使得测量结果更加准确,且测量步骤较为简单。
4.为解决上述技术问题,本发明采用如下技术方案:
5.一种天车轨距测量的数据处理方法,采用全站仪进行测量,并采用最小二乘法对测量数据进行处理,不但要使用最小二乘法对轨道1和轨道2测量数据分别进行处理,还要使用最小二乘法对轨道1和轨道2的端部测量点连线的横向定位线进行拟合,经过综合分析后便可得到准确的测量结果。
6.进一步的,具体处理步骤为:
7.9)首先,架设全站仪到合适位置;
8.10)将全站仪调平,并且进行自由建站;
9.11)利用全站仪对吊车轨道进行测量,并记录测量数据;
10.12)利用最小二乘法对轨道1和轨道2分别进行拟合,k与b的计算公式如下:
[0011][0012][0013]
13)使用最小二乘法对轨道1和轨道2的端部测量点连线的横向定位线进行拟合,横向定位线的方程为y=k3x b3;
[0014]
14)以轨道1作为基准,将轨道2测量结果分别带入到横向定位线的方程y=k3x b3,
从而可以得到五条与横向定位线平行的方程;
[0015]
15)将五条与横向定位线平行的方程分别于轨道1的方程y=k1x b1联立解出五个交点的坐标值;
[0016]
16)使用点到点的距离公式解出轨距c1、c2、c3、c4、c5;
[0017]
点到点的距离公式为:
[0018]
求出轨距偏差。
[0019]
与现有技术相比,本发明的有益技术效果:
[0020]
使得测量结果更加准确,且测量步骤较为简单
附图说明
[0021]
下面结合附图说明对本发明作进一步说明。
[0022]
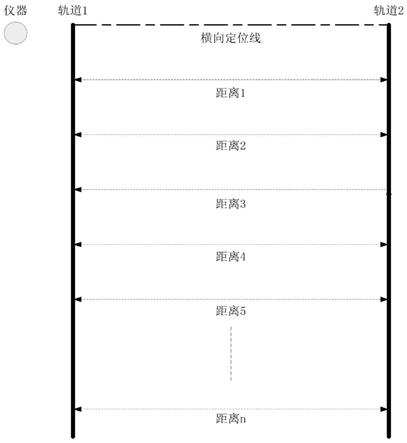
图1为轨距测量说明图。
具体实施方式
[0023]
下面结合附图1对本发明的实施作进一步详细描述:
[0024]
为达到上述目的,本发明采用全站仪进行测量,并采用最小二乘法对测量数据进行处理,不但要使用最小二乘法对轨道1和轨道2测量数据分别进行处理,还要使用最小二乘法对轨道1和轨道2的端部测量点连线的横向定位线进行拟合,经过综合分析后便可得到准确的测量结果,处理步骤为:
[0025]
1)首先,架设全站仪到合适位置;
[0026]
2)将全站仪调平,并且进行自由建站;
[0027]
3)利用全站仪对吊车轨道进行测量(大致做到2米一个测点,不需要钢尺进行准确定位),并记录测量数据,轨道1测量坐标为(x11、y11)(x12、y12)(x13、y13)(x14、y14)(x15、y15),轨道2测量坐标为(x21、y21)(x22、y22)(x23、y23)(x24、y24)(x25、y25);
[0028]
4)利用最小二乘法对轨道1和轨道2分别进行拟合,分别计算出轨道的直线方程和斜率k和截距b,轨道1的方程为y=k1x b1,轨道2的方程为y=k2x b2,k与b的计算公式如下:
[0029][0030]
[0031]
式中:
[0032]
k为轨道直线方程斜率;其中:k1为轨道1直线方程斜率,k2为轨道2直线方程斜率,k3为横向定位线直线方程斜率;
[0033]
b轨道直线方程的截距;其中:b1为轨道1直线方程截距,b2为轨道2直线方程截距,b3为横向定位线直线方程截距;
[0034]
n为每条轨道坐标测量总数量;
[0035]
x
i
为轨道第i个测量北坐标值,y
i
为轨道第i个测量东坐标值;其中:x为轨道1、轨道2和横向定位线北坐标在直线方程中的代表值,y为轨道1、轨道2和横向定位线东坐标在直线方程中的代表值;x1
i
为轨道1第i个测量北坐标值,y1
i
为轨道1第i个测量东坐标值,x2
i
为轨道2第i个测量北坐标值,y2
i
为轨道2第i个测量东坐标值。
[0036]
5)使用最小二乘法对轨道1和轨道2的端部测量点连线的横向定位线进行拟合,横向定位线的方程为y=k3x b3,计算公式如上。
[0037]
6)以轨道1作为基准,将轨道2测量结果(x21、y21)(x22、y22)(x23、y23)(x24、y24)(x25、y25)分别带入到横向定位线的方程为y=k3x b3(k3不变),可以得到b
31
,b
32
、b
33
、b
34
、b
35
五个值,从而可以得到y=k3x b
31
、y=k3x b
32
、y=k3x b
33
、y=k3x b
34
、y=k3x b
35
五条与横向定位线平行的方程。
[0038]
7)将y=k3x b
31
、y=k3x b
32
、y=k3x b
33
、y=k3x b
34
、y=k3x b
35
分别于轨道1的方程y=k1x b1联立解出五个交点的坐标值分别为(x1交1、y1交1)(x1交2、y1交2)(x1交3、y1交3)(x1交4、y1交4)(x1交5、y1交5)。
[0039]
8)使用点到点的距离公式解出(x1交1、y1交1)与(x21、y21)、(x1交2、y1交2)与(x22、y22)、(x1交3、y1交3)与(x23、y23)、(x1交4、y1交4)与(x24、y24)、(x1交5、y1交5)与(x25、y25)轨距为c1、c2、c3、c4、c5。
[0040]
点到点的距离公式为:
[0041]
式中:
[0042]
ci为第i个坐标值的轨道距离。
[0043]
9)使用轨距c1、c2、c3、c4、c5分别减去设计轨距值,则可以求出轨距偏差。
[0044]
以上所述的实施例仅是对本发明的优选方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
