1.本文讨论的实施方式与信息处理装置、优化方法以及存储优化程序的非暂态计算机可读存储介质有关。
背景技术:
2.当将货物放置在多层仓库、表面停放空间、车辆运输船舶(也可以称为“汽车运载船舶(car carrier ship)”或“汽车运载工具(car carrier)”)等中时,使货物或车辆在装载时的布置优化,以便当装载或卸载货物等时货物等不阻塞通道。
3.例如,已经已知一种技术,该技术用于当薄板卷被从多个仓库运输至船舶并在船舶上的两层中堆叠时使具有开放式天花板的单层船舶的平衡等优化。另外,已经已知一种技术,该技术用于在从多个交货源将交付货物交货至多个交货目的地的情况下创建提供出色的运输效率的交货计划,以便在每个交货目的地卸载交付货物后,装载另一交付货物并将其交货至下一交货目的地。此外,已经已知一种技术,该技术用于在汽车运载工具的装载计划(车辆布置)中单独地确定车辆布置,以在避免运载工具中的块内存在运载工具中的障碍物的同时不形成断开的空间(broken space)。
技术实现要素:
4.[技术问题]
[0005]
然而,在上述技术中,当多次装载和卸载货物等时,存在很多约束条件,使得优化花费了很多时间。例如,考虑到在多个港口处将车辆装载至其中以及在多个港口处将车辆从其中卸载的车辆运输船舶。在这种情况下,考虑到能够进行车辆的装载和卸载,需要创建用于在车辆运输船舶内的每个块中布置车辆的计划。这样的计划通常手动地创建,并且花费大量时间。
[0006]
根据一个方面,提供了一种用于减少使货物的布置优化所花费的时间的解决方案。
[0007]
[问题的解决方案]
[0008]
根据实施方式的一方面,提供了一种由计算机实现的优化方法。在示例中,该方法包括:接收与放置货物的目标空间有关的空间信息,该空间信息被划分为多个部分并且定义多个部分之间的路线以及从多个部分中的每个部分至入口的路线;根据空间信息来生成第一约束条件、第二约束条件和第三约束条件,第一约束条件指示在货物的装载或卸载期间在从要装载或要卸载的货物至入口的路线上不存在其他货物,第二约束条件指示要装载的货物的数目和要卸载的货物的数目,并且第三约束条件指示多个部分中的每个部分的最大负载容量;以及基于第一约束条件、第二约束条件和第三约束条件来确定使目标空间的不稳定性程度优化的货物布置。
[0009]
[发明的有益效果]
[0010]
在实施方式的方面,可以减少使货物的布置优化所花费的时间。
附图说明
[0011]
图1是用于描述根据第一实施方式的信息处理装置的图;
[0012]
图2是示出根据第一实施方式的信息处理装置的功能配置的功能框图;
[0013]
图3是车辆运输船舶的示意图;
[0014]
图4是示出与车辆运输船舶中的空间对应的图形结构的图;
[0015]
图5是示出车辆装载和卸载表的图;
[0016]
图6是划分为单元格(cell)的块的示意图;
[0017]
图7是用于描述由优化装置进行的求解以及由解表示的车辆布置的计算的图;
[0018]
图8是示出所优化的车辆配置的图;
[0019]
图9是示出优化处理的流程的流程图;
[0020]
图10是示出第二实施方式的车辆装载和卸载表的图;
[0021]
图11是用于描述根据第二实施方式的停靠港口(ports of call)的顺序的图;
[0022]
图12是用于描述根据第二实施方式的如何指定用于描述约束条件1的公式化的切换的图;
[0023]
图13是用于描述根据第二实施方式的约束条件1的一般表达式的图;
[0024]
图14是用于描述根据第二实施方式的约束条件3的公式化的图;
[0025]
图15是用于描述根据第二实施方式的约束条件3的一般表达式的图;
[0026]
图16是用于描述当存在并发港口时的约束条件1的图;
[0027]
图17是用于描述当存在并发港口时的约束条件3的图;
[0028]
图18是示出根据第二实施方式的优化处理的流程的流程图;以及
[0029]
图19是用于描述硬件配置示例的图。
具体实施方式
[0030]
将参照附图详细地描述本技术中公开的信息处理装置、优化方法和优化程序的实施方式。注意,本公开内容不限于这些实施方式。此外,只要不存在不一致,可以适当地组合这些实施方式中的每一个。
[0031]
[第一实施方式]
[0032]
[信息处理装置的描述]
[0033]
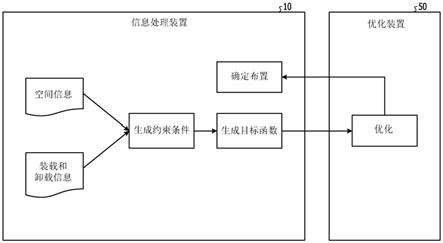
图1是用于描述根据第一实施方式的信息处理装置10的图。图1所示出的信息处理装置10是计算机装置的一个示例,该计算机装置当将货物放置在多层仓库、表面停放空间、车辆运输船舶等中时,使货物或车辆在装载时的布置优化,以便在货物等的装载和卸载期间货物等不阻塞通道。
[0034]
在第一实施方式中,将以在一次航程中在若干港口处将车辆装载至其中以及在若干港口处将车辆从其中卸载的车辆运输船舶为示例来描述货物的布置的示例。注意,车辆是货物的示例,并且车辆运输船舶是放置货物的目标空间的示例。
[0035]
如图1所示出的,信息处理装置10接收与放置车辆的车辆运输船舶的内部有关的空间信息的输入,该空间信息被划分为多个部分并且定义多个部分之间的路线以及从多个部分中的每一个至入口的路线。类似地,信息处理装置10接收与所谓的车辆装载和卸载表对应的装载和卸载信息(loading and unloading information)的输入,所谓的车辆装载
和卸载表指示车辆被装载的港口、车辆被卸载的港口以及在每个港口处有多少车辆被装载或被卸载。
[0036]
然后,信息处理装置10使用输入信息来生成约束条件。例如,信息处理装置10生成第一约束条件,该第一约束条件指示在装载和卸载车辆时在从要装载或要卸载的车辆至入口的路线上不存在其他车辆。另外,信息处理装置10生成第二约束条件,该第二约束条件指示预先指定要装载的车辆的数目和要卸载的车辆的数目。此外,信息处理装置10生成第三约束条件,该第三约束条件指示在负载容量不超过预设负载容量(最大负载容量)的情况下将车辆放置在多个部分中的每一个内。
[0037]
当在每个港口处装载和卸载车辆时,船舶的重心也是重要的,并且优选地进行计划,使得船舶的重心尽可能低,以便减少船舶倾覆的可能性。在本实施方式中,信息处理装置10生成用于计算车辆运输船舶的不稳定性程度的目标函数。此后,信息处理装置10使用优化装置例如退火计算机或伊辛机来确定在第一约束条件、第二约束条件和第三约束条件下使目标函数最小化的车辆布置。利用该配置,信息处理装置10可以自动地生成复杂的约束条件,从而可以缩短使车辆布置优化所花费的时间。
[0038]
[信息处理装置的功能配置]
[0039]
图2是示出根据第一实施方式的信息处理装置10的功能配置的功能框图。如图2所示出的,信息处理装置10包括通信单元11、显示单元12、存储单元13和控制单元20。
[0040]
通信单元11是控制与另一装置的通信的处理单元,并且通过例如通信接口等来实现。例如,通信单元11将各种数据发送至外部装置例如由管理员等使用的装置以及从外部装置例如由管理员等使用的装置接收各种数据。
[0041]
显示单元12是显示各种类型的信息的处理单元,并且通过例如显示器、触摸面板等来实现。例如,显示单元12显示最终获得的车辆布置结果、所计算出的求解结果等。
[0042]
存储单元13是存储各种数据、由控制单元20执行的程序等的处理单元的示例,并且通过例如存储器、硬盘等来实现。存储单元13存储船舶信息14和车辆装载和卸载表15。
[0043]
船舶信息14是与其中放置车辆的车辆运输船舶有关的信息,该信息被划分为多个部分并且定义多个部分之间的路线以及从多个部分中的每一个至入口的路线。例如,船舶信息14对应于与通过图形化地示出车辆运输船舶等的示意图而获得的图形结构有关的信息。
[0044]
首先,将描述车辆运输船舶的示意图。图3是车辆运输船舶的示意图。如图3的示意图所示出的,车辆运输船舶具有从第一层上的甲板1至第六层上的甲板6的六个层。每个甲板被划分为块。车辆运输船舶在甲板3上具有一个入口。甲板通过斜坡s1、s2和s3连接。
[0045]
此外,甲板6被划分为四个块,即块1至块4,甲板5被划分为四个块,即块5至块8,并且甲板4被划分为四个块,即块9至块12。类似地,甲板3被划分为四个块,即块13至块16,甲板2被划分为三个块,即块17至块19,并且甲板1被划分为三个块,即块20至块22。
[0046]
另外,斜坡s1是从甲板6和甲板5至甲板3上的入口的路线,斜坡s2是从甲板4至入口的路线,并且斜坡s1是从甲板2和甲板1至入口的路线。
[0047]
接下来,将描述与通过图形化地示出车辆运输船舶的示意图而获得的图形结构有关的信息。图4是示出与车辆运输船舶中的空间对应的图形结构的图。如图4所示出的,同一甲板中的块彼此连接。另外,甲板6的块1至块4顺序地经由块2、块6和块13连接至入口。甲板
5的块5至块8顺序地经由块6和块13连接至入口。甲板4的块9至块12顺序地经由块10和块13连接至入口。
[0048]
甲板3的块13至块16经由块13连接至入口。甲板2的块17至块19顺序地经由块17、块14和块13连接至入口。甲板1的块20至块22顺序地经由块20、块17、块14和块13连接至入口。
[0049]
注意,船舶信息14包括指定例如每个块的最大负载能力的负载信息以及与图4所示的包括甲板位置、块位置、斜坡位置等的图形结构有关的信息。
[0050]
返回图2,车辆装载和卸载表15是定义车辆运输船舶停靠港口的顺序、要卸载的车辆的数目等的装载和卸载信息的示例。图5是示出车辆装载和卸载表15的图。如图5所示出的,在车辆装载和卸载表15中,装载车辆的装载港口、卸载车辆的卸载港口以及要装载和要卸载的车辆的数目彼此关联。
[0051]
具体地,例如,车辆装载和卸载表15指定车辆运输船舶以港口a
→
港口b
→
港口c
→
港口d
→
港口e
→
港口f的顺序停靠。另外,车辆装载和卸载表15中的数目指示在每个港口处要装载和要卸载的车辆的数目。例如,1600辆车辆(8)在港口b处装载并且在港口f处卸载。
[0052]
控制单元20是控制整个信息处理装置10的处理单元,并且通过例如处理器等来实现。控制单元20包括接收单元21、公式化单元22、优化单元23和输出计算单元24。注意,接收单元21、公式化单元22、优化单元23和输出计算单元24可以通过诸如处理器的电子电路来实现,或者可以实现为由处理器执行的处理的示例。
[0053]
接收单元21是接收船舶信息14和车辆装载和卸载表15的处理单元。例如,接收单元21经由通信单元11从管理员终端等接收船舶信息14和车辆装载和卸载表15并且将船舶信息14和车辆装载和卸载表15存储在存储单元13中。注意,船舶信息14和车辆装载和卸载表15可以是由管理员等人工地生成的信息或者使用已知工具等生成的信息。
[0054]
公式化单元22是使用船舶信息14、车辆装载和卸载表15等执行约束条件和目标函数的公式化的处理单元。具体地,例如,公式化单元22将根据第一实施方式的优化问题视为数学优化问题,并且生成多个约束条件和目标函数。
[0055]
(前提)
[0056]
在此,公式化单元22将每个块划分为单元格(cells),并且将二进制变量分配给各个单元格。图6是划分为单元格的块的示意图。如图6所示出的,每个块被划分为四个单元格。注意,划分的数目(单元格的数目)优选地由优化装置的规格确定。例如,如果单元格的数目太大,则变量的数目增加,并且优化装置的优化速度降低。因此,优选地根据优化装置的处理能力来确定单元格的数目。
[0057]
然后,公式化单元22如下限定变量和常数的定义。“x
ijkm”为值“1”或“0”。注意,当“x
ijkm”为“1”时,意指在块k中的单元格m中存在在装载港口i处装载并且要在卸载港口j处卸载的车辆,以及当“x
ijkm”为“0”时,意指其他情况。“c
ij”为在装载港口i处装载并且要在卸载港口j处卸载的车辆的数目。“b
km”为块k中的单元格m的最大负载容量。“m”为装载港口的数目,“n”为卸载港口的数目,“r”为块的数目,并且“s
k”为块k中的单元格的数目。
[0058]
(约束条件1)
[0059]
接下来,将描述约束条件1。例如,公式化单元22生成约束条件1,该约束条件1指示在装载和卸载货物时在从要装载或要卸载的货物至入口的路线上不存在其他货物。换句话
说,例如,公式化单元22生成指示“当车辆通过某个块时,除非该块中不存在车辆,否则该车辆不能够通过”的约束条件1。
[0060]
例如,当在单元格中存在车辆并且关注于该单元格与入口之间的块时,期望在装载车辆的装载港口之前的装载港口处装载的车辆不存在于该块中,并且在要在其处卸载车辆的卸载港口之后的卸载港口处要卸载的车辆不存在于该块中。因此,当在块r的单元格s中存在在装载港口p处装载并要在卸载港口q处卸载的车辆时,公式化单元22可以通过式(1)来定义阻塞通道的车辆y
pq
,其中,k'指示单元格s与入口之间的块。
[0061][0062]
在此,期望的是,对于特定的x
pqrs
,(x
pqrs
=1时y
pq
=0)和(x
pqrs
=0时y
pq
为任意值),并且这可以由式(2)定义。在这种情况下,(x
pqrs
·
y
pq
)为最小值。因此,期望建立针对所有p、q、r和s计算和的式(3)。
[0063]
x
pqrs
·
y
pq
=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ…
(2)
[0064][0065]
(约束条件2)
[0066]
接下来,将描述约束条件2。例如,公式化单元22生成约束条件2,该约束条件2指示预先指定要装载的货物的数目和要卸载的货物的数目。也就是说,例如,公式化单元22生成指示“要在装载港口处装载和要在卸载港口处卸载的车辆的数目为车辆装载和卸载表15中指定的值”的约束条件2。
[0067]
例如,期望的是,在整个车辆运输船舶中,在装载港口p处装载的车辆的数目与在卸载港口q处卸载的车辆的数目的总和等于车辆装载和卸载表15中的c
pq
值,并且这由式(4)定义。因此,期望建立针对所有p和q计算和的式(5)。
[0068][0069][0070]
(约束条件3)
[0071]
接下来,将描述约束条件3。例如,公式化单元22生成约束条件3,该约束条件3指示在负载容量不超过预设负载容量的情况下将货物布置在多个部分中的每一个中。也就是说,例如,公式化单元22生成指示“不可以在负载容量等于或大于一个单元格的最大负载容量的情况下装载车辆”的约束条件3。
[0072]
例如,与一个港口有关的车辆存在于一个单元格中,但是与两个港口有关的车辆不存在于同一单元格中。换句话说,例如,对于特定块r中的特定单元格s,期望所有港口之
和为0或1,这由式(6)定义。针对特定x
pqrs
的这种条件可以由式(7)定义。因此,期望建立针对所有r和s计算和的式(8)。
[0073][0074][0075][0076]
(目标函数)
[0077]
接下来,将描述目标函数。例如,为了提高车辆运输船舶的稳定性,公式化单元22优选地尽可能地降低车辆运输船舶的重心的位置。在此,将车辆运输船舶的上半部分上的甲板的负载容量与下半部分上的甲板的负载容量之差定义为指示车辆运输船舶的不稳定性程度的值g
i
。也就是说,例如,在第一实施方式中,g
i
的定义例如是“g
i
=(甲板4以上的区域的负载容量)
‑
(甲板3以下的区域的负载容量)”。因此,当车辆运输船舶离开每个港口时的g
i
可以由式(9)定义。例如,式(9)中的g1对应于当车辆运输船舶离开装货港口a时的不稳定性程度。因此,目标函数可以由式(10)使用g
i
的平均值表示。
[0078][0079][0080]
如上面所描述的,公式化单元22生成约束条件1、约束条件2、约束条件3和目标函数,并且将它们输出至优化单元23。
[0081]
优化单元23是在约束条件1、约束条件2和约束条件3下使车辆运输船舶的不稳定性程度优化的处理单元。具体地,例如,优化单元23通过求解所约束的优化问题来计算使不
稳定性程度最小化(尽可能减小不稳定性程度)的解。
[0082]
例如,优化单元23生成式(11)中的能量函数e,该能量函数e为使用了预设的任意常数(β、γ、σ、ε)的、上述约束条件1、约束条件2、约束条件3与目标函数之和。然后,优化单元23将能量函数e输入至优化装置例如伊辛机或退火计算机中,并且运行该优化装置以计算使目标函数的值最小化的值。
[0083][0084][0085]
输出计算单元24是计算最优车辆布置的处理单元。具体地,例如,输出计算单元24使用由具有优化装置的优化单元23获得的求解结果来确定使车辆运输船舶的不稳定性程度最小化的最优车辆布置。然后,输出计算单元24将所确定的车辆布置显示在显示单元12上或将所确定的车辆布置存储在存储单元13中。
[0086]
图7是用于描述由优化装置进行的求解以及由解表示的车辆布置的计算的图。如图7所示出的,输出计算单元24定义二进制变量z
n
,并且将z
n
与x
ijkm
相关联,例如z1=x
1111
和z2=x
1112
。例如,当优化装置使用z
n
=0,(000
……
000)作为初始解来执行计算时,获得由图7中的式(12)表示的解(z1=1、z2=0、
……
、z
13
=1)。
[0087]
在此,当z
n
=1时存在车辆。因此,输出计算单元24提取提供z
n
=1的n,并且获得对应的i、j、k和m。以这种方式,输出计算单元24可以计算车辆所存在的块k中的装载港口i、卸载港口j和单元格m。例如,如果写在车辆装载和卸载表15中的其中装载港口被定义为i并且卸载港口被定义为j的交叉处的数目被定义为c并且装载港口的数目为m,则输出计算单元24可以将c表示为“c=i m(j
‑
1)”。因此,输出计算单元24可以指示车辆c存在于块k中的单元格m中。
[0088]
通过执行上述处理,输出计算单元24计算车辆所存在的块k中的装载港口i、卸载港口j和单元格m,并且将所计算出的结果与示意图相关联,从而确定车辆布置。图8是示出所优化的车辆布置的图。如图8所示出的,输出计算单元24生成指示在车辆装载和卸载表15中示出的车辆(1)至(9)中的每一个的布置的示意图,并且将所生成的示意图显示在显示单元12上。图8的示意图的示例指示例如在甲板6上放置有在装载港口a处装载并且要在卸载港口d处卸载的800辆车辆(1),以及跨甲板6、甲板5和甲板3放置有在装载港口c处装载并且要在卸载港口d处卸载的1300辆车辆(3)。
[0089]
[处理的流程]
[0090]
图9是示出优化处理的流程的流程图。如图9所示出的,当处理开始时(s101:是),信息处理装置10的接收单元21获取船舶信息14(s102)和车辆装载和卸载表15(s103)。
[0091]
随后,公式化单元22基于船舶信息14和车辆装载和卸载表15来生成各个约束条件(s104)和目标函数(s105)。然后,优化单元23生成通过将各个约束条件和目标函数相加而获得的能量函数,将所生成的能量函数输入至优化装置,并且通过优化装置获取求解结果(s106)。
[0092]
之后,输出计算单元24计算通过由优化装置求解的结果(解)表示的车辆布置(s107),并且输出通过计算获得的车辆布置(s108)。
[0093]
[效果]
[0094]
如上面所描述的,信息处理装置10将该问题视为数学优化问题,根据输入数据确定约束条件和目标函数,并且使用优化装置来求解该问题。因此,即使当车辆多次装载和卸载时,信息处理装置10也能够缩短优化所花费的时间。例如,信息处理装置10可以利用优化装置通过仅在约5分钟内求解被手动地求解需要30分钟的问题来获得满足约束的车辆布置。
[0095]
[第二实施方式]
[0096]
如上面所描述的,信息处理装置10可以使用诸如车辆运输船舶的移动体的示意图、车辆装载和卸载表等来自动地生成数学优化问题的、在考虑各种条件时难以以一般方式设置的约束条件。此外,信息处理装置10可以通过考虑约束条件自动地求解数学优化问题来生成复杂的车辆布置,并且将所述复杂的车辆布置输出至预定装置或显示器等,将所述复杂的车辆布置作为车辆布置的提议进行输出,或者将所述复杂的车辆布置提供给车辆运输船舶的运营公司。因此,与诸如不能够自动地创建约束条件的技术的普通技术相比,信息处理装置10可以实现在约束条件的创建时间方面的减少,并且可以缩短使货物布置优化所需的时间。
[0097]
同时,第一实施方式描述了其中在完成车辆的装载(运载入)之后进行车辆的卸载(运载出)的示例。然而,可能存在以下情况:在最后装载港口之前存在卸载港口。在第二实施方式中,将描述用于在这样的情况下更有效地使用自由空间的方法。注意,根据第二实施方式的信息处理装置10的功能配置与第一实施方式的信息处理装置10的功能配置相同。
[0098]
图10是用于描述根据第二实施方式的车辆装载和卸载表15的图,以及图11是用于描述根据第二实施方式的停靠港口的顺序的图。注意,该停靠港口的顺序也可以包括在车辆装载和卸载表15中。
[0099]
如图10所示出的,在车辆装载和卸载表15中,装载车辆的装载港口、卸载车辆的卸载港口以及要装载和要卸载的车辆的相应数目彼此关联。此外,车辆装载和卸载表15定义了装载港口为港口a、港口b和港口d,并且卸载港口为港口c、港口e和港口f。另外,图11中的停靠港口表定义了车辆运输船舶以“港口a、港口b、港口c、港口d、港口e和港口f”的顺序进行港口停靠。考虑到这些定义,将在港口a处装载2200(=500 600 1100)辆车辆,并且将在港口b处装载2000(=300 100 1600)辆车辆。此后,将在港口c处卸载800(=500 300)辆车辆,将在港口d处装载300(=200 100)辆车辆,然后将在港口e处卸载900(600 100 200)辆车辆,并且将在港口f处卸载2800(1100 1600 100)辆车辆。
[0100]
在这样的条件下,如果使用根据第一实施方式的方法,则有可能在将车辆在港口c处卸载之后装载的车辆将不被放置在由于在港口c处卸载而产生的自由空间中。
[0101]
鉴于此,在第二实施方式中,生成根据条件细分的约束条件1和约束条件3,并且执行优化。该配置实现了自由空间的进一步有效使用,从而实现了有效的车辆运输。具体地,在第二实施方式中,在从卸载港口切换至装载港口之前以及在从卸载港口切换至装载港口之后单独地公式化约束条件1,并且将约束条件3公式化以用于在船舶中的负载容量处于最大值的时刻检查每个单元格的负载容量。注意,约束条件2与第一实施方式的约束条件2相同。
[0102]
(约束条件1的公式化)
[0103]
首先,将描述约束条件1,该约束条件1指示在装载(运载入)和卸载(运载出)货物时在从要装载和要卸载的货物至入口的路线上不存在其他货物。关于约束条件1,公式化单元22在货物的负载容量处于最小值的第一时刻,也就是说,在从卸载港口切换至装载港口之前以及在从卸载港口切换至装载港口之后,单独地公式化约束条件1。也就是说,例如,公式化单元22将用于在货物的负载容量处于最小值的第一时刻之前以及在货物的负载容量处于最小值的第一时刻之后将路线切换至入口的条件添加至第一实施方式的约束条件1。
[0104]
具体地,公式化单元22将停靠港口的顺序的划界点确定为切换(aswitching)。图12是用于描述根据第二实施方式的如何指定用于描述约束条件1的公式化的切换的图。如图12所示出的,公式化单元22将装载港口之中的港口b与港口d之间的放置在船舶中的车辆的数目变化(车辆在其处被卸载)的点确定为切换候选a,并且将卸载港口之中的港口c与港口e之间的放置在船舶中的车辆的数目变化(车辆在其处被装载)的点确定为切换候选b。然后,公式化单元22将港口c与港口d之间的点(该点在两种情况下为公共的)指定为切换点。
[0105]
换句话说,例如,公式化单元22按停靠港口的顺序将卸载与装载之间的下述边界指定为切换点:在该边界处,船舶中的负载容量最小化。
[0106]
随后,公式化单元22单独地创建约束条件1。具体地,如图12所示出的,公式化单元22将位于从卸载港口切换至装载港口之前的港口c的索引设置为“j,q=b”,并且将位于从卸载港口切换至装载港口之后的港口d的索引设置为“i,p=a”。注意,船舶在切换点处的负载容量被最小化了。
[0107]
在此,在将车辆在港口d处装载的时刻,已经在港口c处完成了车辆的卸载,并且因此,无需考虑区域n。此外,将车辆在港口c处卸载的时刻位于将车辆在港口d处装载的时刻之前,并且因此,无需考虑区域m。
[0108]
也就是说,如图12所示出的,当在车辆装载和卸载表15中对应于“q≤b”的区域n中的车辆x
pqrs
被卸载时,对应于“i≥a”的区域m中的车辆在港口d之后还未被装载,并且因此,公式化单元22确定不存在障碍物。因此,公式化单元22通过式(12)定义阻碍通道的车辆y
pq
。
[0109][0110]
(当q≤b时)
[0111]
另外,当装载车辆装载和卸载表15中与“p≥a”对应的区域m中的车辆x
pqrs
时,在港口c之前不存在与“j≤b”对应的区域n中的车辆,并且因此,公式化单元22确定不存在障碍
物。因此,公式化单元22通过式(13)定义阻碍通道的车辆y
pq
。
[0112][0113]
(当p≥a时)
[0114]
此外,公式化单元22通过与第一实施方式中的上面所描述的式(1)类似的式(14)来定义当装载和卸载与除了车辆装载和卸载表15中的区域n和区域m之外的区域“p<a,q>b”对应的车辆x
pqrs
时阻碍通道的车辆y
pq
。
[0115][0116]
(当p<a且q>b时)
[0117]
因此,由于在由式(12)、式(13)和式(14)表示的所有情况下,当x
pqrs
=1时,公式化单元22需要设置y
pq
=0,因此公式化单元22定义使得式(15)中的b被最小化。
[0118][0119]
(约束条件1的一般化)
[0120]
接下来,公式化单元22将由式(15)表示的约束条件1的公式化表达为一般表达式。图13是用于描述根据第二实施方式的约束条件1的一般表达式的图。图13示出了与装载或卸载过程相关联的停靠港口的顺序。也就是说,图13的示例定义了船舶以从港口a至港口j的顺序进行港口停靠,并且在港口a处进行装载。
[0121]
在这样的条件下,公式化单元22将港口d与港口e之间的边界以及港口h与港口i之间的边界指定为在从卸载港口切换至装载港口之前以及在从卸载港口切换至装载港口之后的时刻。在此,由于船舶上的负载容量在这些边界处具有最小值,因此港口d和港口h被称为前最小港口,并且港口e和港口i被称为后最小港口。
[0122]
在这种条件下,公式化单元22将式(15)定义为式(16),并且式(16)中的y
pq
可以通过式(17)使用函数j1(p)和函数m1(p)被一般化。在此,函数j1(p)是以下函数:其返回装载港口p之前的港口中最近的前最小港口的索引q 1,并且如果在装载港口p之前不存在前最小港口,则返回1。另外,函数m1(p)是以下函数:其返回卸载港口q之后的港口中最近的后最小港口的索引p
‑
1,并且如果在卸载港口q之后不存在后最小港口,则返回m。
[0123][0124][0125]
(约束条件3的公式化)
[0126]
接下来,将描述约束条件3,该约束条件3指示在负载容量不超过预设负载容量的情况下将货物被放置多个部分中的每一个中。关于第一实施方式中的约束条件3,公式化单元22添加用于在船舶中的负载容量处于最大值的第二时刻检查每个单元格的负载容量的条件。
[0127]
图14是用于描述根据第二实施方式的约束条件3的公式化的图。由于图14的格式和信息与图10和图11的格式和信息相同,因此将省略这些格式和信息的详细描述。约束条件3定义了不可能在一个单元格中装载具有等于或大于最大负载容量的负载容量的车辆。据此,公式化单元22确定在船舶中的负载容量处于最大值的时刻检查在每个单元格中是否存在具有等于或大于最大负载容量的负载容量的车辆是足够的,并且指定从装载切换至卸载的时刻。
[0128]
也就是说,例如,公式化单元22将船舶离开港口b和港口d时的点指定为时刻。因此,公式化单元22确定在从港口b切换至港口c期间图14中的区域q的负载容量是否超过负载容量的上限,并且确定在从港口d切换至港口e期间图14中的区域p的负载容量是否超过负载容量的上限。因此,建立了式(18)。因此,使用于获得所有r和s之和的式(19)最小化足以。
[0129]
并且
[0130][0131]
(约束条件3的一般化)
[0132]
接下来,公式化单元22将由式(19)表示的约束条件3的公式化表达为一般表达式。具体地,在最后装载港口之前存在多个卸载港口的情况下,公式化单元22使用图15来定义一般表达式。图15是用于描述根据第二实施方式的约束条件3的一般表达式的图。由于图15中所示出的停靠港口的顺序与图13相同,因此将省略这些停靠港口的详细描述。
[0133]
如图15所示出的,公式化单元22将停靠港口的顺序划分为由最小港口间隔开的区域(路径)。在图15中,港口a、港口b、港口c和港口d属于路径1,港口e、港口f、港口g和港口h属于路径2,并且港口i和港口j属于路径3。每条路径具有一个最大港口(港口b、港口f和港口i)。然后,由于在每个路径中使上式(19)中的d最小化足以,因此公式化单元22能够通过使用式(16)来一般化如式(20)中的约束条件3。
[0134][0135]
注意,式(20)中的“n”指示路径的索引,并且“p”指示路径的集合。此外,函数m3(n)是以下函数:其返回路径n 1中的后最小港口的索引p
‑
1,并且当路径n 1不存在时返回m。另外,函数j3(n)是以下函数:其返回路径n
‑
1中的前最小港口的索引q 1,并且当路径n
‑
1不存在时返回1。
[0136]
(如何寻址并发港口)
[0137]
同时,除了卸载港口和装载港口不同的情况之外,可能存在既进行装载又进行卸
载的港口(并发港口)。将考虑在这样的情况下的约束条件。图16是用于描述当存在并发港口时的约束条件1的图,以及图17是用于描述当存在并发港口时的约束条件3的图。注意,图16和图17示出了其中在港口c处进行装载和卸载的示例。
[0138]
如图16所示出的,公式化单元22考虑到并发港口c被划分为两个港口,并且执行卸载过程的卸载港口c
d
和执行装载过程的装载港口c
l
是连续的。因此,卸载港口c
d
是前最小港口,并且装载港口c
l
是后最小港口。因此,当在车辆装载和卸载表15中对应于“q≤b”的区域y中的车辆x
pqrs
被卸载时,对应于“i≥a”的区域x中的车辆还未被装载,并且因此,不存在障碍物。另外,当车辆装载和卸载表15中与“p≥a”对应的区域x中的车辆x
pqrs
被装载时,不存在与“j≤b”对应的区域y中的车辆,并且因此,不存在障碍物。
[0139]
以这种方式,公式化单元22关于约束条件1将并发港口c划分为前最小港口c
d
和后最小港口c
l
,并且因此,即使当存在并发港口c时,公式化单元22也可以通过与上面所描述的式(16)和式(17)类似的式来实现公式化和一般化。
[0140]
此外,如图17所示出的,船舶上的负载容量处于最大值的时刻是当船舶离开作为在卸载之前的港口的港口b和港口d时的时刻。因此,需要控制装载,使得当船舶离开港口b时区域y内的车辆的负载容量不超过上限,并且使得当船舶离开港口d时区域d内的车辆的负载容量不超过上限。
[0141]
以这种方式,即使当存在并发港口c时,公式化单元22也关于约束条件3将并发港口c划分为前最小港口c
d
和后最小港口c
l
,从而可以细分负载容量处于最大值的时刻。因此,公式化单元22可以通过与上面所描述的式(20)类似的式来实现公式化和一般化。
[0142]
(优化)
[0143]
如上面所描述的,信息处理装置10将由式(21)表示的能量函数e输入优化装置例如伊辛机或退火计算机——其中式(16)和式(17)用于约束条件1并且式(20)用于约束条件3——并且运行该优化装置。注意,“β、γ、σ”是预先设置的任意常数,并且约束条件2与由第一实施方式的式(5)表示的约束条件2相同。
[0144][0145]
尽管在此省略了目标函数,但是信息处理装置10可以使用在第一实施方式中描述的式(10)的目标函数来生成类似于式(11)的能量函数,并且通过执行优化来计算使目标函数的值最小化的值。
[0146]
(处理的流程)
[0147]
图18是示出根据第二实施方式的优化处理的流程的流程图。如图18所示出的,当
处理开始时(s201:是),信息处理装置10的接收单元21获取船舶信息14(s202)和车辆装载和卸载表15(s203)。
[0148]
随后,公式化单元22基于船舶信息14和车辆装载和卸载表15来确定作为上面所描述的各个时刻的停靠港口的顺序的划界点(s204),基于按停靠港口的顺序的划界点来细分条件(s205),并且根据所细分的条件来生成各个约束条件(s206)。类似地,公式化单元22生成目标函数(s207)。
[0149]
然后,优化单元23生成通过将各个约束条件和目标函数相加而获得的能量函数,将所生成的能量函数输入至优化装置,并且获取优化装置的求解结果(s208)。此后,输出计算单元24计算由优化装置的求解结果(解)表示的车辆布置(s209),并且输出通过计算获得的车辆布置(s210)。
[0150]
(效果)
[0151]
如上面所描述的,即使在最后装载港口之前存在卸载港口,或者存在并发港口,信息处理装置10也能通过细分条件来生成约束条件1和约束条件3,从而能够确定能有效使用卸载之后的自由空间的车辆布置。
[0152]
[第三实施方式]
[0153]
尽管上面已经描述了实施方式,但是除了上面所描述的模式之外,可以以各种不同的模式来实现这些实施方式。
[0154]
[数值等]
[0155]
在上述实施方式中使用的车辆的数目、港口的数目、示出车辆运输船舶内部的配置的图等仅是示例,并且可以任意地改变。此外,尽管上面的实施方式描述了将车辆运输船舶上的每个块划分为多个单元格的示例,但是实施方式不限于此,并且一个块可以仅包括一个单元格。此外,作为用于执行优化的优化装置,也可以使用采用各种总线、网络等连接至信息处理装置10的外部装置,或者也可以使用内置在信息处理装置10中的处理器等。注意,各种已知方法可适用为用于使能量函数和目标函数优化的方法。另外,重心是不稳定性程度的指标的示例。
[0156]
[货物]
[0157]
以车辆运输船舶为示例,上面已经描述了上面的实施方式。然而,实施方式不限于此,并且可以将诸如多层仓库、表面停放空间和货物存储装置的各种货物和空间用作目标。注意,货物不限于车辆,并且可以以相同方式处理诸如纸板盒的各种交付货物。注意,目标空间的不稳定性程度的示例不仅包括运载货物的移动体的重心,而且还包括放置货物的仓库的适当位置和重心等。
[0158]
[系统]
[0159]
除非另外指定,否则可以可选地改变上面所描述或在附图中示出的包括处理过程、控制过程、指定名称、各种类型的数据、以及参数的信息片段。
[0160]
另外,附图中示出的每个装置的各个组成元件在功能上是概念性的,并且不必一定如附图所示出地物理配置。换句话说,每个装置的分配和集成的指定形式不限于附图中示出的形式。也就是说,例如,可以根据各种类型的负载、使用情况等通过在功能上或物理上分配并集成在可选单元中来配置全部或部分装置。注意,接收单元21是接收单元的示例,公式化单元22是获取单元、指定单元和生成单元的示例,并且优化单元23和输出计算单元
24是确定单元的示例。
[0161]
此外,在每个装置中执行的各个处理功能的全部或任何部分可以由中央处理单元(cpu)和由cpu分析和执行的程序来实现,或者可以由有线逻辑实现为硬件。
[0162]
[硬件]
[0163]
接下来,将描述信息处理装置10的硬件配置示例。图19是用于描述硬件配置示例的图。如图19所示出的,信息处理装置10包括通信装置10a、硬盘驱动器(hdd)10b、存储器10c和处理器10d。此外,图19中示出的各个单元通过总线等互连。
[0164]
通信装置10a是网络接口卡等,并且与另一服务器通信。hdd 10b存储用于激活图2示出的功能的程序和数据库(db)。
[0165]
处理器10d从hdd 10b等读取执行与图2示出的每个处理单元的处理类似的处理的程序,并且在存储器10c中开发所读取的程序,从而激活执行参照图2等描述的每个功能的处理。例如,该处理执行与信息处理装置10中包括的每个处理单元的功能类似的功能。具体地,例如,处理器10d从hdd 10b等读取具有与接收单元21、公式化单元22、优化单元23、输出计算单元24等相同功能的程序。然后,处理器10d进行执行与接收单元21、公式化单元22、优化单元23、输出计算单元24等的处理类似的处理的处理。
[0166]
如上面所描述的,信息处理装置10操作为以下信息处理装置:其通过读取并执行程序来执行优化方法。此外,信息处理装置10还可以通过由介质读取装置从记录介质读取上面所描述的程序并执行上面所描述的所读取的程序来实现与上述实施方式的功能类似的功能。注意,在其他实施方式中引用的程序不限于由信息处理装置10执行。例如,实施方式可以类似地应用于另一计算机或服务器执行该程序的情况或者这样的计算机和服务器协同地执行该程序的情况。
[0167]
[引用列表]
[0168]
[专利文献]
[0169]
日本公开特许公报第10
‑
305929号。
[0170]
日本公开特许公报第2005
‑
112609号。
[0171]
日本公开特许公报第1
‑
127526号。
[0172]
参考标记列表
[0173]
10 信息处理装置
[0174]
11 通信单元
[0175]
12 显示单元
[0176]
13 存储单元
[0177]
14 船舶信息
[0178]
15 车辆装载和卸载表
[0179]
20 控制单元
[0180]
21 接收单元
[0181]
22 公式化单元
[0182]
23 优化单元
[0183]
24 输出计算单元
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
