1.本发明涉及车辆技术领域,特别涉及一种用于确定图像中目标的底线的方法及装置、测距方法及装置。
背景技术:
2.目前,具有ad(autonomous driving,自主驾驶)功能或adas(advanced driver assistance system,高级驾驶辅助系统)的车辆已开始逐步推向市场,极大地促进了智能交通的发展。相关技术中,支持ad/adas的传感器主要有雷达、视觉相机系统、激光雷达、超声波传感器等,其中视觉相机系统因能够获得与人类视觉一样的二维图像信息而应用最为广泛。
3.由于单目摄像头具有小型化、易于安装、需要更小的计算量等优点,其在实际市场中的使用也越来越多。使用单目摄像头的其中一种距离估计方式是基于目标的路面位置来进行距离估计,其中路面位置为单目摄像头光轴的侧向平面与目标离车体最近的底线交点。如图1所示,假设安装于车辆上的单目摄像头110与水平面的垂直高度为hc,单目摄像头110的垂直轴与水平面平行。如果测得单目摄像头110与目标120的路面位置的连线与水平面的夹角为θ,则目标距离车辆的距离d=hc/tanθ。采用这种方式需要精确的知晓目标的路面位置,要知晓路面位置,需要首先知晓目标的底线。相关技术中,可以采用差分图像分析方法或者强度分析方法来寻找目标的底线,其中差分图像分析方法虽然能够快速确定出底线,但是精度不够高,而强度分析方法通常会由于噪声的影响而估计出错误的底线。
技术实现要素:
4.有鉴于此,本发明旨在提出一种用于确定图像中目标的底线的方法,以解决相关技术中目标的底线的确定精度不够高的技术问题。
5.为达到上述目的,本发明的技术方案是这样实现的:
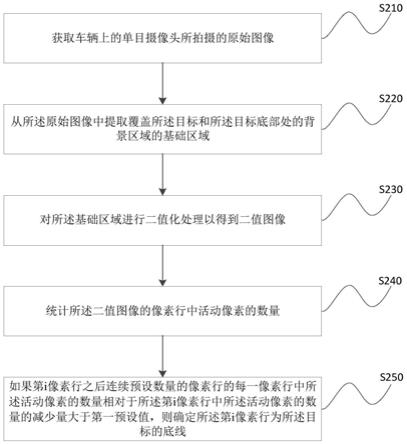
6.一种用于确定图像中目标的底线的方法,所述用于确定图像中目标的底线的方法包括:获取车辆上的单目摄像头所拍摄的原始图像;从所述原始图像中提取覆盖所述目标和所述目标底部处的背景区域的基础区域;对所述基础区域进行二值化处理以得到二值图像;统计所述二值图像的像素行中活动像素的数量,所述活动像素为所述目标对应的像素;以及如果第i像素行之后连续预设数量的像素行的每一像素行中所述活动像素的数量相对于所述第i像素行中所述活动像素的数量的减少量大于第一预设值,则确定所述第i像素行为所述目标的底线,其中i为正整数。
7.进一步的,所述统统计所述二值图像的像素行中活动像素的数量包括:从所述二值图像中确定出分析区域,所述分析区域的顶部包括至少部分所述目标的底部区域,且所述分析区域的底部包括至少部分所述目标底部处的背景区域;统计所述分析区域的每一像素行中所述活动像素的数量。
8.进一步的,所述分析区域为矩形区域,所述分析区域的顶点在直角坐标系的第一
坐标轴上的坐标满足:
9.n1x=(nlt nlb)/2,n2x=(nrt nrb)/2;和/或
10.所述分析区域的顶点在所述直角坐标系的第二坐标轴上的坐标满足:
11.m1x<min(mlb,mrb)-l2和m2x>max(mlb,mrb) l1,
12.其中,n1x为所述分析区域的左侧顶点在所述第一坐标轴上的坐标,n2x为所述分析区域的右侧顶点在所述第一坐标轴上的坐标,m1x为所述分析区域的上侧顶点在所述第二坐标轴上的坐标,m2x为所述分析区域的下侧顶点在所述第二坐标轴上的坐标;
13.(mlt,nlt)、(mrt,nrt)、(mlb,nlb)、(mrb,nrb)分别为预先确定的所述二值图像中所述目标的左上点、右上点、左下点、右下点分别在所述第一坐标轴和所述第二坐标轴上的坐标;所述l1为第二预设值,l2为第三预设值。
14.进一步的,使用差分运算预先确定所述二值图像中所述目标的左上点、右上点、左下点、右下点分别在所述第一坐标轴和所述第二坐标轴上的坐标。
15.进一步的,所述基础区域的宽度为所述原始图像中所述目标的宽度的两倍至三倍;和/或所述第一预设值为像素行中所述活动像素的峰值数量的预设百分比。
16.进一步的,所述对所述基础区域进行二值化处理以得到二值图像包括:使用大津算法对所述基础区域进行二值化处理以得到所述二值图像。
17.相对于现有技术,本发明所述的用于确定图像中目标的底线的方法具有以下优势:
18.本发明所述的用于确定图像中目标的底线的方法基于二值图像,统计二值图像的像素行中活动像素(目标对应的像素)的数量,将活动像素开始显著减少的像素行作为目标的底线,如此,能够精确的确定出目标的底线。
19.本发明的另一目的在于提出一种测距方法,以解决相关技术中基于单目摄像头的距离估计不够精确的技术问题。
20.为达到上述目的,本发明的技术方案是这样实现的:
21.一种测距方法,所述测距方法包括:根据上述的用于确定图像中目标的底线的方法确定目标的底线;计算所述原始图像中所述目标的底线与底边的距离;以及根据所述单目摄像头与水平面的垂直高度、所述单目摄像头的视场角、和所述目标的底线与所述原始图像的底边的距离,确定所述车辆与所述目标的距离。
22.进一步的,在所述单目摄像头的轴被假设为与水平面平行的情况下,根据以下公式确定所述车辆与所述目标的距离:
[0023][0024]
其中,d为所述车辆与所述目标的距离,h2为所述目标的底线与所述原始图像的底边的距离归一化后的值,θ
fov
为所述视场角,h
c
为所述单目摄像头与水平面的所述垂直高度。
[0025]
相对于现有技术,本发明所述的测距方法具有以下优势:
[0026]
本发明所述的测距方法基于本发明实施例提供的确定图像中目标的底线的方法,目标的底线被精确地确定出来后,基于该底线而确定的车辆与目标的距离的精确度也相应的能够得到改善。
[0027]
本发明的另一目的在于提出一种用于确定图像中目标的底线的装置,以解决相关技术中目标的底线的确定精度不够高的技术问题。
[0028]
为达到上述目的,本发明的技术方案是这样实现的:
[0029]
一种用于确定图像中目标的底线的装置,所述用于确定图像中目标的底线的装置包括:获取模块,用于获取车辆上的单目摄像头所拍摄的原始图像;提取模块,用于从所述原始图像中提取覆盖所述目标和所述目标底部处的背景区域的基础区域;处理模块,用于对所述基础区域进行二值化处理以得到二值图像;统计模块,用于统计所述二值图像的像素行中活动像素的数量,所述活动像素为所述目标对应的像素;以及确定模块,用于如果第i像素行之后连续预设数量的像素行的每一像素行中所述活动像素的数量相对于所述第i像素行中所述活动像素的数量的减少量大于第一预设值,则确定所述第i像素行为所述目标的底线,其中i为正整数。
[0030]
所述用于确定图像中目标的底线的装置与上述用于确定图像中目标的底线的方法相对于现有技术所具有的优势相同,在此不再赘述。
[0031]
本发明的另一目的在于提出一种测距装置,以解决相关技术中基于单目摄像头的距离估计不够精确的技术问题。
[0032]
为达到上述目的,本发明的技术方案是这样实现的:
[0033]
一种测距装置,所述测距装置包括:底线确定模块,用于根据上述的用于确定图像中目标的底线的方法确定目标的底线;计算模块,用于计算所述原始图像中所述目标的底线与底边的距离;以及距离确定模块,用于根据所述单目摄像头与水平面的垂直高度、所述单目摄像头的视场角、和所述目标的底线与所述原始图像的底边的距离,确定所述车辆与所述目标的距离。
[0034]
所述测距装置与上述测距方法相对于现有技术所具有的优势相同,在此不再赘述。
[0035]
本发明的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
[0036]
构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施方式及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
[0037]
图1示出了计算目标距离车辆的距离的示意图;
[0038]
图2示出了根据本发明一实施例的用于确定图像中目标的底线的方法的流程示意图;
[0039]
图3示出了基础区域和分析区域的示意图;
[0040]
图4a示出了一基础区域的二值图像的示意图,图4b示出了基于图4a所示的基础区域中分析区域内的活动像素的数量示意图;
[0041]
图5示出了根据本发明一实施例的测距方法的流程示意图;
[0042]
图6示出了计算车辆与目标的距离的几何示意图;
[0043]
图7a示出了单目摄像头拍摄的原始图像的示意,图7b示出了根据边缘检测算法对图7a中的原始图像进行检测得到的4个交通锥的示意图;
[0044]
图8a示出了图7b中1号交通锥分析区域示意图,图8b示出了图8a所示的分析区域
内活动像素的数量示意图;
[0045]
图9a示出了图7b中2号交通锥分析区域示意图,图9b示出了图9a所示的分析区域内活动像素的数量示意图;
[0046]
图10a示出了图7b中3号交通锥分析区域示意图,图10b示出了图10a所示的分析区域内活动像素的数量示意图;
[0047]
图11a示出了图7b中4号交通锥分析区域示意图,图11b示出了图10a所示的分析区域内活动像素的数量示意图;
[0048]
图12a示出了使用现有技术中的方法估计的目标的底线的示意图,图12b示出了使用本发明实施例提供的方法估计的目标的底线的示意图;
[0049]
图13a示出了原始图像中目标的位置示意图,图13b示出了估计的车辆与目标的距离的示意图;
[0050]
图14示出了根据本发明一实施例的用于确定图像中目标的底线的装置的结构框图;以及
[0051]
图15示出了根据本发明一实施例的测距装置的结构框图。
具体实施方式
[0052]
需要说明的是,在不冲突的情况下,本发明中的实施方式及实施方式中的特征可以相互组合。
[0053]
下面将参考附图并结合实施方式来详细说明本发明。
[0054]
图2示出了根据本发明一实施例的用于确定图像中目标的底线的方法的流程示意图。如图2所示,本发明实施例提供一种用于确定图像中目标的底线的方法,所述图像为单目摄像头拍摄的图像,所述用于确定图像中目标的底线的方法包括以下步骤:
[0055]
在步骤s210,获取车辆上的单目摄像头所拍摄的原始图像。
[0056]
单目摄像头可以设置于车顶上,用于拍摄车辆行驶方向的预设距离内的图像。单目摄像头可以被设置为实时拍摄图像,也可以被设置为周期的拍摄图像。
[0057]
在步骤s220,从所述原始图像中提取覆盖所述目标和所述目标底部处的背景区域的基础区域。
[0058]
所述目标例如可以是交通锥,如果原始图像中包括多个交通锥,则可以针对每一交通锥底线的确定。
[0059]
基础区域中覆盖可以覆盖一个目标的相关区域。基于区域可以全部覆盖目标,也可以部分覆盖目标。在部分覆盖目标的情况下,应至少覆盖目标的底部部分。基础区域所覆盖的目标的部分可以占目标的一百分比以上,例如至少50%以上,以确保目标的底部部分一定位于基础区域内。
[0060]
目标底部处的背景区域可以为目标底部至图像底边的背景区域中至少靠近目标底部的部分。基础区域的宽度可以是原始图像中目标的宽度的两倍至三倍。例如,在提取出的基础区域中,目标可以位于中间部分,目标的两侧部分的宽度可以分别于目标的宽度基本相等。这里所述的目标的宽度可以是目标的最大宽度,或目标的平均宽度。目标的宽度可以是粗略估算的值。
[0061]
在具体执行时,可以对原始图像执行任意公知的目标识别算法,从而识别出图像
中的目标,基于目标的位置提取出基础区域。
[0062]
在步骤s230,对所述基础区域进行二值化处理以得到二值图像。
[0063]
例如,使用大津算法对所述基础区域进行二值化处理以得到所述二值图像。可以理解,本发明实施例并不限制于此,也可以使用其他任意的二值化算法,如,微分直方图算法等。
[0064]
在步骤s240,统计所述二值图像的像素行中活动像素的数量。
[0065]
本发明实施例中活动像素是指所述目标对应的像素。
[0066]
可选的,可以分别统计二值图像中每一像素行中活动像素的数量。活动像素的数量根据活动像素的像素值进行统计。活动像素的像素值例如可以是第一值(例如,通常为“0”值或“1”值),则统计像素行中第一值的数量,即可统计出该像素行中活动像素的数量。
[0067]
可选的,也可以对二值图像进行再提取,从二值图像中确定出分析区域,即从基础区域中确定一子区域。分析区域的顶部部分可以全部包含于目标,底部部分可以包括至少部分图像底部处的背景区域,从而确保目标的底线的至少一部分和至少一部分的图像底部处背景区域一定位于分析区域内。在基础区域的包括多个目标的情况下,也可以针对每一个目标分别确定一分析区域。确定出分析区域后,可以分别统计分析区域中每一像素行中活动像素的数量。
[0068]
在步骤s250,如果第i像素行之后连续预设数量的像素行的每一像素行中所述活动像素的数量相对于所述第i像素行中所述活动像素的数量的减少量大于第一预设值,则确定所述第i像素行为所述目标的底线,其中i为正整数。
[0069]
可以从上至下顺序遍历每一像素行来执行步骤s250。所述预设数量可以根据实际需要设置为任意合适的值,例如预设数量的范围可以设置为2至10等,或者可选的,第i像素行之后连续预设数量的像素行的每一像素行也可以替换为第i像素行之后的每一像素行。第一预设值可以是活动像素的峰值数量的预设百分比。每一像素行中活动像素的数量统计出来后,可以将这些数量中的最大值作为所述峰值数量。所述预设百分比可以根据需要设置为任意合适的值,例如预设百分比的范围例如可以是20%至30%等,如,可以设置为25%等。
[0070]
如果第i像素行开始之后连续预设数量的像素行的每一像素行中活动像素的数量均相对于第i像素行中活动像素的数量显著减少,则可以认为活动像素的数量显著减少的像素行已经不属于目标的像素行,且可以认为第i像素行是目标的底线。
[0071]
本发明实施例提供的用于确定图像中目标的底线的方法基于二值图像的像素行中活动像素的数量来确定目标的底线,过程可以不受噪声的影响而快速确定出准确的底线。
[0072]
图3示出了基础区域和分析区域的示意图。如图3所示,从原始图像中提取的基础区域覆盖目标的80%以上的部分以确保覆盖目标的底部,并且基础区域还覆盖目标底部处的背景区域。基础区域的宽度可以约为图像中目标的宽度的3倍,且目标可以基本位于基础区域的中间位置处。图3中基础区域为一矩形区域,且基础区域的边分别与直角坐标系的坐标轴平行。但是可以理解,基础区域也可以是任意其它合适的形状。
[0073]
分析区域可以是一矩形区域,且分析区域的边可以分别与直角坐标系的坐标轴平行。分析区域的顶部可以包括至少部分所述目标的底部区域,且分析区域的底部可以包括
至少部分目标底部处的背景区域。分析区域的横向宽度可以基本等于或者小于目标的横向宽度。例如,可以设置具有一定宽度的分析区域的顶部部分被包含于目标内,底部部分包括一部分的目标底部处的背景区域。从而可以确保分析区域内必然包括有目标的底线。所述直角坐标系例如可以原始图像的左上点为坐标原点,或者在基础区域为矩形区域的情况下,可以基础区域的左上点为坐标原点。参考如3,所述直角坐标系的两个坐标轴中第一坐标轴可以是n轴,第二坐标轴可以是m轴。
[0074]
可选的,可以根据目标的边缘点的坐标来预先确定分析区域的顶点的坐标。例如可以使用边缘检测算法检测出目标的边缘点,然后确定出目标的左上点a、右上点b、左下点c、右下点d,即边缘顶点。例如,在所述目标为交通锥的情况下,所述左上点a、右上点b、左下点c、右下点d可以为图像中交通锥的四个顶点的坐标。目标的左上点、右上点、左下点、右下点m轴和n轴上的坐标可以被预先确定,分别为(mlt,nlt)、(mrt,nrt)、(mlb,nlb)、(mrb,nrb)。左上点、右上点、左下点、右下点的坐标也可以通过例如差分运算等一些简单的运算而确定。通常,在物体检测过程中,可以将差分运算应用于原始图像,得到差分图像。差分图像可以表述为d(ix,iy)=p(ix 1,iy)-p(ix-1,iy),其中d(ix,iy)表示差分图像,p(ix 1,iy)和p(ix-1,iy)表示分别检测到的两幅原始图像。然后对差分图像进行阈值处理,使得差分图像变为二值化图像。在二值化图像中可以有效显示出图像边缘,则可以根据显示出的图像边缘确定边缘顶点的坐标。分析区域的顶点在直角坐标系的n轴上的坐标满足:
[0075]
n1x=(nlt nlb)/2,n2x=(nrt nrb)/2。
[0076]
其中,nlx为分析区域的左侧顶点a1、c1在n轴上的坐标,n2x为分析区域的右侧顶点b1、d1在n轴上的坐标。nlx和n2x可以用于限定分析区域的宽度。
[0077]
分析区域的顶点在直角坐标系的m轴上的坐标满足:
[0078]
m1x<min(mlb,mrb)-l2和m2x>max(mlb,mrb) l1,
[0079]
其中,m1x为分析区域的上侧顶点a1、b1在m轴上的坐标,m2x为分析区域的下侧顶点c1、d1在m轴上的坐标。l1为第二预设值,l1的大小决定了分析区域中图像底部处的背景区域的高度(在m轴上的高度)。可以根据需要将l1设置为任意合适的值。l2为第三预设值,l2的大小决定了分析区域的顶部部分在目标内的高度,可以根据需要将l2设置为任意合适的值。m1x和m2x可以用于限定分析区域的高度。
[0080]
通过对分析区域的宽度和高度进行限定,可以确保分析区域的顶部部分全部被包含于所述目标内,且分析区域的底部部分包括至少部分目标底部处的背景区域。
[0081]
图4a示出了一基础区域的二值图像的示意图。所述二值图像可以是对基础区域使用大津算法进行二值化处理后得到的。在所述二值图像中提取分析区域,对分析区域中的每一像素行中活动像素的数量进行统计,得到图4b所示的示意图。在图4b中横坐标为像素行的行数m,纵坐标为活动像素的数量。从图4b中可以分析出,在像素行的行数m为578时,活动像素的数量开始显著减少,即在该像素行开始之后连续预设数量的像素行的每一像素行中活动像素的数量相对于该像素行中活动像素的数量的减少量大于第一预设值。因而可以确定第578像素行为目标的底线。可知,目标的底线可以快速、准确的确定出来。
[0082]
图5示出了根据本发明一实施例的测距方法的流程示意图。如图5所示,本发明实施例还提供一种测距方法,所述测距方法可以包括以下步骤:
[0083]
在步骤s510,确定原始图像中目标的底线。
[0084]
这可以使用根据本发明任意实施例所述的用于确定图像中目标的底线的方法来确定目标的底线。
[0085]
在步骤s520,计算所述原始图像中所述目标的底线与底边的距离。
[0086]
图像中目标的底线与原始图像的底边的距离可以使用像素来表征。
[0087]
在步骤s530,根据所述单目摄像头与水平面的垂直高度、所述单目摄像头的视场角、和所述目标的底线与所述原始图像的底边的距离,确定所述车辆与所述目标的距离。
[0088]
图6示出了计算车辆与目标的距离的几何示意图。如图6所示,车辆上单目摄像头110的垂直轴假定与水平面平行。单目摄像头110与水平面的垂直高度为h
c
,单目摄像头110的视场角为θ
fov
,车辆与目标120的距离为d,单目摄像头110与目标120的路面位置的连线与水平面的夹角为θ。则根据图中的几何关系可以得到等式(1)至(3):
[0089]
tan(θ
fov
/2)=(hh/2)/d
ꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0090]
hh/2=h2 d tanθ=h2hh d tanθ
ꢀꢀꢀꢀ
(2)
[0091]
tanθ=h
c
/d
ꢀꢀꢀꢀꢀꢀ
(3)
[0092]
其中,在等式(2)中h2为图像中目标的底线与原始图像的底边的距离归一化后的值。原始图像中目标的底线与的底边的距离可以使用像素表征,可以将表征原始图像高度的像素数量归一化处理为值1,则h2为表征目标的底线与的底边的距离的像素数量与表征原始图像高度的像素数量的比值。hh为单目摄像头110光轴的侧向平面在目标120处的高度,即hh为线段ef的长度。h2为目标120的实际底线与点f之间的距离,h1为目标120的实际高度。原始图像的高度被归一化后,根据对应关系,可得,h2=h2/hh,h1=h1/hh,则h2=h2hh。
[0093]
将等式(3)代入等式(1)和(2)可得等式(4)和(5):
[0094]
tan(θ
fov
/2)d
–
(1/2)hh=0
ꢀꢀꢀꢀ
(4)
[0095]
(1/2-h2)hh=h
c
ꢀꢀꢀ
(5)
[0096]
根据等式(4)和(5)可得,车辆与目标120的距离d可以由等式(6)表示:
[0097][0098]
在确定出目标的底线之后,将表征目标的底线与原始图像的底边的距离的像素数量进行归一化处理后得到h2的值,再结合单目摄像头与水平面的垂直高度hc、单目摄像头的视场角θ
fov
,根据公式(6)就可以准确的计算出车辆与目标之间的距离。在该实施例中,假定了车辆上单目摄像头的轴假定与水平面平行,在单目摄像头的轴与水平面不平行的情况,可以对公式(6)进行适当修改,以进行计算。
[0099]
本发明实施例所述的测距方法基于本发明实施例提供的确定图像中目标的底线的方法,目标的底线被精确地确定出来后,基于该底线而确定的车辆与目标的距离的精确度也相应的能够得到改善。
[0100]
图7a示出了单目摄像头拍摄的原始图像的示意。如图7b所示,在距离车辆大于129.5m处具有四个交通锥。图7b示出了根据边缘检测算法对图7a中的原始图像进行检测得到的4个交通锥的示意图。4个交通锥分别为1号交通锥、2号交通锥、3号交通锥、4号交通锥。
[0101]
图8a示出了图7b中1号交通锥分析区域示意图,图8b示出了图8a所示的分析区域
内活动像素的数量示意图。根据图8b中每一像素行的活动像素的数量示意图,可以得出原始图像中1号交通锥的底线为第582像素行。
[0102]
图9a示出了图7b中2号交通锥分析区域示意图,图9b示出了图9a所示的分析区域内活动像素的数量示意图。根据图9b中每一像素行的活动像素的数量示意图,可以得出原始图像中2号交通锥的底线为第576像素行。
[0103]
图10a示出了图7b中3号交通锥分析区域示意图,图10b示出了图10a所示的分析区域内活动像素的数量示意图。根据图10b中每一像素行的活动像素的数量示意图,可以得出原始图像中3号交通锥的底线为第554像素行。
[0104]
图11a示出了图7b中4号交通锥分析区域示意图,图11b示出了图10a所示的分析区域内活动像素的数量示意图。根据图11b中每一像素行的活动像素的数量示意图,可以得出原始图像中4号交通锥的底线为第557像素行。
[0105]
图12a示出了使用现有技术中的方法估计的目标的底线的示意图,图12b示出了使用本发明实施例提供的方法估计的目标的底线的示意图。从图12a和图12b中可以明显看出,采用本发明实施例提供的方法估计的目标的底线相对现有技术中的方法估计的目标的底线更接近于地面,即,相对现有技术具有很明显的改进。
[0106]
图13a示出了原始图像中目标的位置示意图,图13b示出了估计的车辆与目标的距离的示意图。在图13a中图像中框出来的的5个交通锥由远及近(相对当前车辆而言)与车辆的距离分别为155.6m、138.6m、126.1m、112.6m、91.5m。图13b中圆圈所在位置为根据本发明实施例提供的测距方法而测量出来的5个交通锥的距离,其中测量出来的5个交通锥由远及近(相对当前车辆而言)与车辆的距离分别为156.3m、138.4m、125.1m、111.3m、89.9m,5个交通锥与车辆的实际距离和测量的距离之间的差值分别为:-0.7m、0.2m、1m、1.3m、1.6m。5个交通锥的的测量误差最高不超过1.75%。可见,本发明实施例提供的基于二值图像中活动像素的数量来确定目标的底线,并根据确定出的目标的底线来计算车辆与目标的距离的精度得到了很大的改善。
[0107]
图14示出了根据本发明一实施例的用于确定图像中目标的底线的装置的结构框图。如图14所示,本发明实施例还提供一种用于确定图像中目标的底线的装置,所述装置可以包括:获取模块1410,用于获取车辆上的单目摄像头所拍摄的原始图像;提取模块1420,用于从所述原始图像中提取至少覆盖所述目标底部和所述目标底部处的背景区域的基础区域;处理模块1430,用于对所述基础区域进行二值化处理以得到二值图像;统计模块1440,用于统计所述二值图像的像素行中活动像素的数量,所述活动像素为所述目标对应的像素;以及确定模块1450,用于如果第i像素行之后连续预设数量的像素行的每一像素行中所述活动像素的数量相对于所述第i像素行中所述活动像素的数量的减少量大于第一预设值,则确定所述第i像素行为所述目标的底线,其中i为正整数。基于二值图像,统计二值图像的像素行中活动像素(目标对应的像素)的数量,将活动像素开始显著减少的像素行作为目标的底线,如此,可以精确的确定出目标的底线。
[0108]
本法实施例提供的用于确定图像中目标的底线的装置的具体工作原理与益处与本发明实施例提供的用于确定图像中目标的底线的方法的具体工作原理与益处相同,这里将不再赘述。
[0109]
图15示出了根据本发明一实施例的测距装置的结构框图。如图15所示,本发明实
施例还提供一种测距装置,所述装置可以包括:底线确定模块1510,用于根据本发明任意实施例所述的用于确定图像中目标的底线的方法确定目标的底线;计算模块1520,用于计算所述原始图像中所述目标的底线与底边的距离;以及距离确定模块1530,用于根据所述单目摄像头与水平面的垂直高度、所述单目摄像头的视场角、和所述目标的底线与所述原始图像的底边的距离,确定所述车辆与所述目标的距离。基于本发明实施例提供的确定图像中目标的底线的方法,目标的底线被精确地确定出来后,基于该底线而确定的车辆与目标的距离的精确度也相应的能够得到改善。
[0110]
本发明实施例提供的测距装置的具体工作原理及益处与本发明实施例提供的测距方法的具体工作原理及益处相同,这里将不再赘述。
[0111]
本发明其他实施例还提供了一种机器可读存储介质,该机器可读存储介质上存储有指令,该指令用于使得机器能够执行本发明任意实施例所述的用于确定图像中目标的底线的方法,和/或执行本发明任意实施例所述的测距方法。其中,所述机器可读存储介质包括但不限于相变内存(pram)、静态随机存取存储器(sram)、动态随机存取存储器(dram)、其他类型的随机存取存储器(ram)、只读存储器(rom)、电可擦除可编程只读存储器(eeprom)、快闪记忆体(flash memory)或其他内存技术、只读光盘只读存储器(cd-rom)、数字多功能光盘(dvd)或其他光学存储、磁盒式磁带,磁带磁盘存储或其他磁性存储设备等各种可以存储程序代码的介质。其中,所述机器可以例如是单目摄像头的控制器。
[0112]
以上所述仅为本发明的较佳实施方式而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
