1.本实用新型专利涉及一种巡检机器人轨道系统,尤其适用于采煤工作面检测自动化检测的一种采煤工作面可重构巡检机器人轨道系统,属于机器人领域。
背景技术:
2.煤矿井下综采工作面作为煤炭的第一生产现场,具有作业空间狭小、设备间配合动作复杂、作业环境恶劣等特点导致人工巡检困难,巡检人员安全无法保障。因此,使用巡检机器人代替人工实时监测工作面的具体工况必不可少。巡检机器人属于可远程操作的独立子系统,其上安装了红外摄像仪、三维激光扫描仪、防爆摄像等多种仪器,根据实际需求在工作面上往返巡检。现有的采煤工作面巡检机器人行走的轨道一般安装在输送机电缆槽上,轨道与轨道之间需要连接起来形成一条连续的轨道。
3.现有的技术中,巡检机器人轨道一般安装在输送机或液压支架上,轨道之间采用与其等径的弹簧连接,接头嵌入轨道内,当综采工作面组合设备在不断向前移动的过程中带来了垂直方向、水平方向的弯曲时,弹簧易凸起或凹下,使轨道不平整,巡检机器人通过轨道间连接处时,颠簸较厉害;为使轨道连接弹簧在工作面移动时不会变形脱出伤人,接头嵌入式轨道较多,使得后期维修拆装较为困难,不利于设备实现标准化、通用化。
技术实现要素:
4.本实用新型针对现有技术存在的问题,提供了一种采煤工作面可重构巡检机器人轨道系统,该轨道系统既能满足综采工作面中的空间要求,且能够解决液压支架会移动从而导致悬挂轨道时断时续的问题,使巡检机器人行走平稳,且便于快速拆装。
5.本实用新型的采煤工作面可重构巡检机器人轨道系统,包括单个工字钢轨道,单个工字钢轨道,工字钢轨道设有上下两个轨道,其中上轨道顶部设有用以悬挂在液压支架顶梁上的吊装组件,上轨道两侧分别设有用于与另一条工字钢轨道连接的电磁铁工字钢轨道的下轨道上设有可在下轨道上来回移动的巡检机器人,巡检机器人底部设有用以安装摄像头等设备的防爆云台。
6.所述巡检机器人包括巡检机器人主体,巡检机器人主体为矩形结构,巡检机器人主体上方设有多个支架,每个支架内侧设有用以在工字钢轨道的下轨道上滑动的驱动轮单元,巡检机器人主体一侧设有与内部驱动电机连接的皮带主动轮,多个支架中的一个支架外侧设有与驱动轮单元共轴的皮带从动轮,一个支架上设有用以检测驱动轮旋转圈数最终推导出移动距离的编码器,驱动轮单元与皮带从动轮之间通过皮带连接。
7.所述上轨道两侧的电磁铁分为电磁铁a和电磁铁b,中电磁铁a和电磁铁b上设有相互匹配的凸起和凹槽结构且通电后产生的电磁极性相对,用以快速与其它工字钢轨道的电磁铁 a或电磁铁b的平整吸合连接,电磁铁外部设有磁导率高的材料制成的磁场屏蔽外壳。
8.工字钢轨道两侧分别设有作为巡检机器人移动限位装置的限位挡板,当两节工字钢轨道相连时,限位挡板位于下轨道的上端,巡检机器人可以在相互通过电磁铁连接的工
字钢轨道上正常移动;当两节工字钢轨道分离时,限位挡板自动降下并阻挡巡检机器人移动通过断开电磁铁连接的工字钢轨道边缘,此时机器人停车或返回巡检。
9.限位挡板包括横向设置的直齿锥齿轮和竖向设置的直齿锥齿轮,其中直齿锥齿轮连接有驱动电机,直齿锥齿轮下方连接有滚珠丝杠,滚珠丝杠上设有滑块挡板,当两工字钢轨道分离时,电机驱动滚珠丝杠转动,滑块挡板移动到最下端,立于工字钢轨道下轨道上。
10.限位挡板为永磁体构成,靠近电磁铁端的磁极与通电后的电磁铁相反,当靠近的电磁铁通电后限位挡板在磁极斥力的作用下上移,从而使巡检机器人通过,当电磁铁断电后,限位挡板在自身重力作用下回落下来从而阻挡巡检机器人通过。
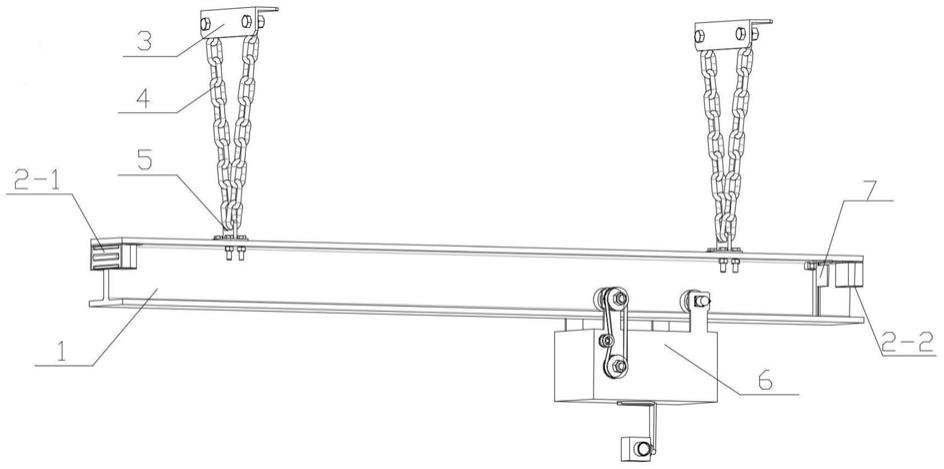
11.所述吊装组件包括与液压支架连接的吊装角铁和与工字钢轨道上轨道顶部连接的吊装底座,吊装角铁与吊装底座之间设有吊装铁链。
12.所述巡检机器人主体上还设有压紧皮带防止其松弛打滑的张紧轮。
13.所述防爆云台上根据需要设置不同的检测仪器,包括红外摄像仪、三维激光扫描仪、防爆摄像机。
14.有益效果如下:
15.1、本实用新型采用的可重构工字钢轨道,两轨道间能断开再组合,当液压支架移架发生错位时,轨道系统可以自适应,自行调节断开或组合,巡检机器人可以无障碍通过;
16.2、本实用新型的可重构工字钢轨道可快速拆卸及连接,能够适应液压支架检修期间的轨道拆装工作;
17.3、本实用新型的可重构工字钢轨道架设在液压支架的顶部护板上,不会影响到液压支架、采煤机及其他相关设备的运转,保证了巡检机器人在煤矿工作面的安全运行。
附图说明
18.图1是本实用新型可重构巡检机器人轨道立体示意图;
19.图2是本实用新型可重构巡检机器人轨道连接方式示意图;
20.图3是限位挡板结构示意图;
21.图4是本实用新型巡检机器人组成结构示意图;
22.图5是本实用新型可重构巡检机器人轨道控制系统图;
23.图6是液压支架错位时可重构巡检机器人轨道状态图;
24.图7是本实用新型可重构巡检机器人轨道运行状态图;
25.图中:1
‑
单个工字钢轨道,2
‑
电磁铁,2
‑1‑
电磁铁a,2
‑2‑
电磁铁b,3
‑
吊装角铁,4
‑
吊装铁链,5
‑
吊装底座,6
‑
巡检机器人主体,7
‑
限位挡板,7
‑1‑
驱动电机,7
‑2‑
直齿锥齿轮a,7
‑3‑ꢀ
直齿锥齿轮b,7
‑4‑
滚珠丝杠,7
‑5‑
滑块挡板,8
‑
皮带主动轮,9
‑
张紧轮,10皮带,11
‑
皮带从动轮,12
‑
驱动轮单元,13
‑
编码器,14
‑
防爆云台
具体实施方式
26.下面结合说明书附图和具体实施方式对本实用新型作进一步的描述。
27.如图1和图2所示,本实用新型的一种采煤工作面可重构巡检机器人轨道系统,包括单个工字钢轨道1,单个工字钢轨道1,工字钢轨道1设有上下两个轨道,其中上轨道顶部设有用以悬挂在液压支架顶梁上的吊装组件,所述吊装组件包括与液压支架连接的吊装角
铁3和与工字钢轨道1上轨道顶部连接的吊装底座5,吊装角铁3与吊装底座5之间设有吊装铁链4;上轨道两侧分别设有用于与其他工字钢轨道1连接的电磁铁2工字钢轨道1的下轨道上设有可在下轨道上来回移动的巡检机器人,巡检机器人底部设有用以安装摄像头等设备的防爆云台14;防爆云台14上根据需要设置不同的检测仪器,包括红外摄像仪、三维激光扫描仪、防爆摄像机。
28.所述上轨道两侧的电磁铁2分为电磁铁a2
‑
1和电磁铁b2
‑
2,中电磁铁a2
‑
1和电磁铁b2
‑
2 上设有相互匹配的凸起和凹槽结构且通电后产生的电磁极性相对,用以快速与其它工字钢轨道1的电磁铁a2
‑
1或电磁铁b2
‑
2的平整吸合连接,电磁铁2外部设有磁导率高的材料制成的磁场屏蔽外壳;工字钢轨道1两侧分别设有作为巡检机器人移动限位装置的限位挡板7,当两节工字钢轨道1相连时,限位挡板7位于下轨道的上端,巡检机器人可以在相互通过电磁铁2连接的工字钢轨道1上正常移动;当两节工字钢轨道1分离时,限位挡板7自动降下并阻挡巡检机器人移动通过断开电磁铁2连接的工字钢轨道1边缘,此时机器人停车或返回巡检;
29.限位挡板7的结构有两种方案,分别为:
30.如图3所示,限位挡板7包括横向设置的直齿锥齿轮a7
‑
2和竖向设置的直齿锥齿轮b7
‑
3,其中直齿锥齿轮a7
‑
2连接有驱动电机7
‑
1,直齿锥齿轮b7
‑
3下方连接有滚珠丝杠7
‑
4,滚珠丝杠7
‑
4撒会给你设有滑块挡板7
‑
5,当两工字钢轨道1分离时,电机7
‑
1驱动滚珠丝杠7
‑
4 转动,滑块挡板7
‑
5移动到最下端,立于工字钢轨道1下轨道上;
31.限位挡板7为永磁体构成,靠近电磁铁2端的磁极与通电后的电磁铁2相反,当靠近的电磁铁2通电后限位挡板7在磁极斥力的作用下上移,从而使巡检机器人通过,当电磁铁2 断电后,限位挡板7在自身重力作用下回落下来从而阻挡巡检机器人通过。
32.如图4所示,所述巡检机器人包括巡检机器人主体6,巡检机器人主体6为矩形结构,巡检机器人主体6上方设有多个支架,每个支架内侧设有用以在工字钢轨道1的下轨道上滑动的驱动轮单元12,巡检机器人主体6一侧设有与内部驱动电机连接的皮带主动轮8,多个支架中的一个支架外侧设有与驱动轮单元12共轴的皮带从动轮11,一个支架上设有用以检测驱动轮单元12旋转圈数最终推导出移动距离的编码器13,驱动轮单元12与皮带从动轮11 之间通过皮带10连接。巡检机器人主体6上还设有压紧皮带10防止其松弛打滑的张紧轮9。巡检机器人主体6上设有张紧轮调节装置,通过调节张紧调节装置,可以使张紧轮9在水平方向上移动,继而对皮带11施加压力张紧。
33.进一步所述巡检机器人驱动轮单元12上安装有编码器13,编码器13可以测出驱动轮单元12旋转过得圈数,并将此信息传输至机器人控制系统,已知驱动轮单元12的周长可以通过算法计算出机器人的里程确定机器人在工字钢轨道1上的位置。
34.进一步所述巡检机器人主体6上安装有防爆云台14,其上可以安装不同的检测仪器,如红外摄像仪、三维激光扫描仪、防爆摄像等。
35.如图5所示,可重构巡检机器人轨道的控制系统包括液压支架的调直系统,单个工字钢轨道控制器,机器人控制系统,控制器终端。液压支架调直系统可以确定液压支架的位置信息和直线度信息,并将信息传递至控制终端;控制终端将液压支架调直系统的移架定位和直线度信息传导至单个工字钢控制器,控制工字钢轨道1上的电磁铁2电路的通断和限位开关 7上电机的正反转;控制器终端通过wifi、4g、5g的通讯方式与机器人控制系统实现
数据交换,将液压支架移架工字钢轨道断开等信息传递至机器人控制系统,机器人控制系统控制巡检机器人在工字钢轨道上移动或停车。
36.如图6、图7所示,一种采煤工作面可重构巡检机器人轨道系统的工作方法,其步骤为:
37.a在液压支架的顶板上通过吊装组件横向设置工字钢轨道1,然后对液压支架和工字钢轨道1进行编号;
38.b当工作面整排液压支架的控制系统检测到液压支架本体未发生移架整体成一条直线时,控制悬挂的工字钢轨道1两端上的电磁铁2通电并与两侧液压支架上设置的工字钢轨道1相互吸合;
39.c通过电磁铁2相互吸合的工字钢轨道1上的限位档板7此时移动到工字钢轨道1下轨道的上方,两条工字钢轨道1的下轨道连通,巡检机器人在连通的下轨道上往复移动并根据设定的方案进行巡检;
40.d当控制系统检测到整排液压支架中某一液压支架移架时,便断开当前液压支架的工字钢轨道1两端电磁铁2的电,电磁铁2断电后限位档板7回落至下轨道两侧,从而防止巡检机器人移动到下轨道断开的位置,检测到前方工字钢轨道断开便会停车等待时间,若超过等待预设等待时间后限位档板7仍然阻挡轨道通路的话,则巡检机器人反向巡检;
41.e当控制系统检测到两个液压支架再次移动到同一水平线时,重复步骤b和步骤c将两工字钢轨道1上的电磁铁2通电相互吸合,巡检机器人式中保持在工字钢轨道1的下轨道上往返巡检,当遇到移动前方出现限位档板7即停机等待,若超过等待时间后限位档板7仍然没有上移则继续反向巡检。
42.具体实施例:
43.首先将液压支架及其上安装的工字钢轨道进行编号,井下工作面中的液压支架有几十到几百个,此处仅绘制出了六个液压支架,编号为
①
~
⑥
。当液压支架调直系统检测到液压支架未发生移架整体形成一条直线时,将信息传递给控制器终端,控制器终端将信息传递给单个轨道控制器和机器人控制器,单个轨道轨道控制器控制两个工字钢轨道1上的电磁铁2
‑
1 和电磁铁2
‑
2通电吸合,整个轨道接通,限位挡板7处于上极限位置,巡检机器人在轨道上往复移动进行巡检;当液压支架进行移架时,液压支架调直系统监测到液压支架
④
~
⑥
的位置信息及运动情况,控制器终端将信息传递给支架
③
和支架
④
上的单个轨道控制器,此时工字钢轨道
③
上右端电磁铁断电,限位档板下降至最下端,工字钢轨道
④
左端的电磁铁都断电,此时机器人控制系统接收到工字钢轨道
③
断开的信息,通过里程计判断自身的位置,当机器人位于工字钢轨道
③
上是,控制巡检机器人停车等待,并判断等待时间是否超过五分钟,等待时间超时后巡检机器人便返回巡检;当液压支架调直系统检测到移架结束并且形成一条直线时,控制系统控制工字钢轨道上的电磁铁通电相互吸合,限位档板再次上升至上极限位置,整个轨道接通,巡检机器人接收到轨道接通的信息后,判断自身的位置,继续向下一个液压支架移动,以此往复。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

