1.本发明涉及船舶与海洋工程的定位系统领域,特别涉及一种基于滑模自适应的多点系泊系统定位控制方法。
背景技术:
2.半潜式平台对于水平面内的横荡、纵荡及艏摇运动不具有回复力,需安装定位系统来抵御海洋环境的扰动影响,进而减小平台的水平运动,确保油气生产的正常作业。因此,多种海洋结构物,如系泊定位系统、动力定位系统、锚辅助动力定位系统等被广泛应用于半潜式生产平台。在这些定位方式中,系泊系统的初装、使用及维修成本均较低,且其日常维护检查较为便捷,因而其在定位系统中占据主导地位。
3.半潜式平台的定位多采用多点系泊系统,而多点系泊系统控制算法是影响定位性能的核心技术。现有的各类控制算法,普遍具有定位精度不高、定位效果有限以及算法复杂等问题。
技术实现要素:
4.本发明的目的是提供一种基于滑模自适应的多点系泊系统定位控制方法,克服半潜式生产平台在海面作业时由于强烈外界干扰、系统的非线性和模型的不确定性等因素导致系泊定位精度不高的缺陷,提高多点系泊系统的定位精度。
5.为了实现以上目的,本发明通过以下技术方案实现:
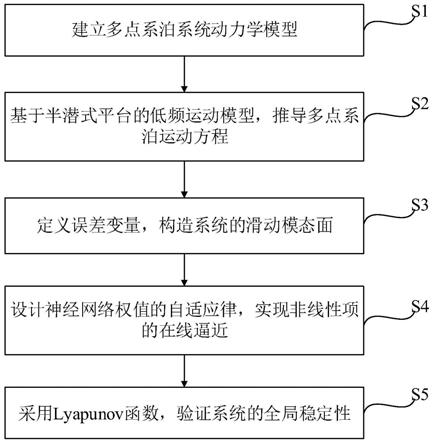
6.一种基于滑模自适应的多点系泊系统定位控制方法,包含以下步骤:
7.s1、建立多点系泊系统动力学模型;
8.s2、基于半潜式平台的低频运动模型,推导多点系泊运动方程;
9.s3、定义误差变量,构造系统的滑动模态面;
10.s4、设计神经网络权值的自适应律,实现非线性项的在线逼近;
11.s5、采用lyapunov函数,验证系统的全局稳定性。
12.所述步骤s2中,进一步包含:
13.所述多点系泊系统的非线性耦合低频运动方程为:
[0014][0015][0016]
其中,η=[x y ψ]
t
为固定坐标系(x
e y
e z
e
)下的多点系泊系统纵荡位移、横荡位移及艏摇角度;v=[u v r]
t
为运动坐标系(x y z)下多点系泊系统纵荡、横荡及艏摇三个方向的速度向量;j(n)为固定坐标系与运动坐标系之间的旋转矩阵;m为多点系泊系统附加质量矩阵和惯性矩阵的叠加;c(v)为多点系泊系统斜对称科里奥利向心力矩阵;d为多点系泊系统阻尼矩阵;τ
m
为由系泊缆绳产生的控制力矩;τ
e
为风、波浪和洋流施加的环境力矩。
[0017]
所述步骤s3中,进一步包含:
[0018]
定义多点系泊系统位置误差函数,得到系统的滑动模态面:
[0019]
e=η
d
‑
η
ꢀꢀ
(3),
[0020][0021]
对滑模面s求导,并将所述非线性耦合低频运动方程代入得:
[0022][0023]
多点系泊系统滑模控制律τ
m
选取:
[0024][0025]
式(5)、(6)中p、q、f的计算如下:
[0026][0027]
其中,e表示平台位置偏差,η
d
表示平台目标位置,κ表示位置误差系数且κ>0,ε表示运动趋近切换面s=0的速率且ε>0,λ表示指数趋近律系数且λ>0。
[0028]
所述步骤s4中,进一步包含:
[0029]
采用高斯函数h(σ):
[0030][0031]
f(σ)=w
*t
h(σ) δ
ꢀꢀ
(9)
[0032]
rbf神经网络的网络输入取则网络输出为:
[0033][0034]
其中,j是神经网络的隐藏节点,j=1,2,3,...,n;σ是网络输入层的向量;||
·
||表示欧几里得范数;h
j
是神经网络中节点j的高斯函数;c
j
是中心向量;b
j
是高斯扩展宽度;f(σ)是神经网络输出的期望值;w
*
是神经网络的理想权重;δ是神经网络的逼近误差,δ≤δ
n
,δ
n
是误差边界。
[0035]
所述步骤s4中,进一步包含:
[0036]
采用饱和函数sat(s)替代符号函数sgn(s),即其中δ为边界层,对式(6)中存在的未知项f,利用式(10)的rbf神经网络进行自适应逼近,得到最终的控制律τ
m
为:
[0037][0038]
基于以上控制律设计及满足稳定性分析的需求,设计对应的自适应律为:
[0039][0040]
其中,γ表示正常数。
[0041]
所述步骤s5中,全局稳定性使用lyapunov函数直接法,包含如下过程:
[0042]
其中
[0043]
定义lyapunov函数为:
[0044]
其中γ>0(14)
[0045]
由式(13)和式(14)可得:
[0046][0047]
把式(12)代入式(15)可得:
[0048][0049]
由于rbf神经网络逼近误差δ为很小的正实数,取ε>δ,则
[0050]
当时,s≡0,根据lasalle不变集原理,闭环系统渐进稳定,当时间t
→
∞时,滑模面s
→
0。
[0051]
与现有技术相比,本发明具有如下优点:
[0052]
(1)本发明建立多点系泊系统控制模型,利用神经网络逼近任意函数的特性,对不确定因素进行在线估计,优化了多点系泊系统模型算法;
[0053]
(2)本发明的多点系泊模型具有较强的鲁棒性,能够满足半潜式平台在外界干扰和模型不确定情况下对期望作业地点的有效定位,具有很好的推广价值和应用前景。
附图说明
[0054]
为了更清楚地说明本发明的技术方案,下面将对描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一个实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图:
[0055]
图1为本发明一实施例提供的基于滑模自适应的多点系泊系统定位控制方法的流程图;
[0056]
图2为本发明提供的多点系泊系统动力学模型;
[0057]
图3为本发明提供的多点系泊控制算法结构图。
具体实施方式
[0058]
以下结合附图和具体实施方式对本发明提出的方案作进一步详细说明。根据下面说明,本发明的优点和特征将更清楚。需要说明的是,附图采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施方式的目的。为了使本发明的目的、
特征和优点能够更加明显易懂,请参阅附图。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容能涵盖的范围内。
[0059]
如图1所示,本发明提供的一种基于滑模自适应的多点系泊系统定位控制方法,其特征在于,包含以下步骤:
[0060]
s1、建立多点系泊系统动力学模型;
[0061]
s2、基于半潜式平台的低频运动模型,推导多点系泊运动方程;
[0062]
s3、定义误差变量,构造系统的滑动模态面;
[0063]
s4、设计神经网络权值的自适应律,实现非线性项的在线逼近;
[0064]
s5、采用lyapunov函数,验证系统的全局稳定性。
[0065]
下面结合图2和图3对本发明进行详细介绍。
[0066]
在步骤s1中,本发明建立的多点系泊系统动力学模型在平台水平方向上分为纵荡、横档荡及艏摇运动,该模型为仅有波浪激励下的三自由度非线性系统,模型结构如图2所示。
[0067]
在步骤s2中,本发明的多点系泊运动方程的推导基于低频慢漂运动,该多点系泊运动方程如下:
[0068][0069][0070]
其中,η=[x y ψ]
t
为固定坐标系(x
e y
e z
e
)下的多点系泊系统纵荡位移、横荡位移及艏摇角度;v=[u v r]
t
为运动坐标系(x y z)下多点系泊系统纵荡、横荡及艏摇三个方向的速度向量;j(n)为固定坐标系与运动坐标系之间的旋转矩阵;m为多点系泊系统附加质量矩阵和惯性矩阵的叠加;c(v)为多点系泊系统斜对称科里奥利向心力矩阵;d为多点系泊系统阻尼矩阵;τ
m
为由系泊缆绳产生的控制力(力矩);τ
e
为风、波浪和洋流施加的环境力(力矩)。
[0071]
在步骤s3中,定义多点系泊系统位置误差函数,得到系统的滑动模态面:
[0072]
e=η
d
‑
η
ꢀꢀ
(3),
[0073][0074]
对滑模面(切换函数)s求导,并将所述非线性耦合低频运动方程代入得:
[0075][0076]
多点系泊系统滑模控制律τ
m
选取:
[0077][0078]
式(5)、(6)中p、q、f的计算如下:
[0079][0080]
其中,e表示平台位置偏差,η
d
表示平台目标位置,κ表示位置误差系数且κ>0,ε表示运动趋近切换面s=0的速率且ε>0,λ表示指数趋近律系数且λ>0。
[0081]
可以理解的是,系泊平台在海洋环境中因受到外界环境的作用力处于不平衡状态,因此需要缆绳的张力来维持系统处于平衡状态,而缆绳的张力是时变的,通过锚机的收放缆来实现。控制律τ
m
就是表示通过控制算法得出的缆绳张力。
[0082]
在步骤s4中,采用高斯函数h(σ):
[0083][0084]
f(σ)=w
*t
h(σ) δ
ꢀꢀꢀ
(9)
[0085]
rbf神经网络的网络输入取则网络输出为:
[0086][0087]
其中,j是神经网络的隐藏节点,j=1,2,3,...,n;σ是网络输入层的向量;||
·
||表示欧几里得范数;h
j
是神经网络中节点j的高斯函数;c
j
是中心向量;b
j
是高斯扩展宽度;f(σ)是神经网络输出的期望值;w
*
是神经网络的理想权重;δ是神经网络的逼近误差,δ≤δ
n
,δ
n
是误差边界。
[0088]
进一步的,为避免或减少振动问题,采用饱和函数sat(s)替代符号函数sgn(s),即其中δ为边界层,对式(6)中存在的未知项f,利用式(10)的rbf神经网络进行自适应逼近,得到最终的控制律τ
m
为:
[0089][0090]
基于以上控制律设计及满足稳定性分析的需求,设计对应的自适应律为:
[0091][0092]
其中,γ表示正常数。
[0093]
在步骤s5中,全局稳定性使用lyapunov函数直接法,包含如下过程:
[0094]
其中
[0095]
定义lyapunov函数为:
[0096]
其中γ>0(14)
[0097]
由式(13)和式(14)可得:
[0098][0099]
把式(12)代入式(15)可得:
[0100][0101]
由于rbf神经网络逼近误差δ为很小的正实数,取ε>δ,由因此
[0102]
当时,s≡0,根据lasalle不变集原理,闭环系统渐进稳定,当时间t
→
∞时,滑模面s
→
0。
[0103]
由此可知,本发明提供的控制算法最终能使系统全局稳定。
[0104]
尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

