1.本发明属于转台设计技术领域,具体为一种集成化通用型方位俯仰两轴转台。
背景技术:
2.方位俯仰转台是实现负载方位俯仰两维运动的功能部件,由方位和俯仰两套旋转轴系组成。传统的方位俯仰转台一般由方位和俯仰两套装置组成,方位装置安装到基座上,俯仰装置安装到方位装置上。方位一般采用轴转外壳不转的立轴式结构,方位动力传动和数据传动集成在方位装置内;俯仰采用叉架结构,叉架随方位旋转、不俯仰,俯仰动力传动和数据传动集成在俯仰叉架内;而且伺服控制系统一般都与转台分置,集成度不高。传统的方位俯仰转台大多针对特定的负载条件设计,一般都为非标产品,通用性不强。
技术实现要素:
3.本发明的目的在于提出了一种集成化通用型方位俯仰两轴转台。
4.实现本发明目的的技术解决方案为:一种集成化通用型方位俯仰两轴转台,包括基座、方位箱体、方位动力传动部分、方位数据传动部分、俯仰动力传动部分、俯仰数据传动部分、左俯仰臂、右俯仰臂、伺服控制系统,其中,方位动力传动部分、方位数据传动部分、俯仰动力传动部分、俯仰数据传动部分、伺服控制系统均集成在方位箱体内;所述方位箱体设置在基座上,承载整部转台;
5.所述方位动力传动部分设置在方位箱体内底部,包括方位电机、方位减速器、方位小齿轮、方位大齿轮、方位主轴承、方位轴、方位安装盘、方位过渡轴、过渡外壳、方位辅助轴承,所述方位轴的下端与基座的顶端配合紧固连接,方位安装盘定位圆与方位箱体下部定位孔配合、方位安装盘定位面与方位箱体下部定位面贴合紧固连接;
6.所述方位安装盘通过方位主轴承与方位轴动连接;
7.所述方位大齿轮在方位主轴承和方位安装盘的下方与方位轴配合紧固连接,方位大齿轮、方位轴和基座不旋转,方位减速器通过方位偏心套设置在方位安装盘上,所述方位减速器的顶部输入端与方位电机输出轴连接,底部输出旋转轴与方位小齿轮连接,所述方位小齿轮与方位大齿轮啮合,由方位电机驱动方位减速器的输出旋转轴和方位小齿轮旋转,从而带动方位安装盘和方位箱体绕方位大齿轮和方位轴旋转,实现箱体旋转而轴不转的方位动力传动方式;
8.所述过渡外壳的一端固定在方位安装盘的顶端,所述方位辅助轴承装入过渡外壳上端的轴承安装孔,所述辅助轴承的外圈与过渡外壳上的轴承安装孔配合,过渡外壳、方位辅助轴承的外圈随方位安装盘旋转,所述方位过渡轴的底端与方位轴的顶端配合紧固连接,所述方位过渡轴的上端固定在方位辅助轴承的内圈内,方位轴、方位过渡轴、方位辅助轴承的内圈不旋转;
9.当方位倾覆力矩大于阈值时,采用方位主轴承和方位辅助轴承的轴承组合方式,由方位主轴承同时承受轴向载荷和径向载荷、方位辅助轴承承受径向载荷;在方位倾覆力
矩较小于阈值时,仅采用方位主轴承,由方位主轴承同时承受轴向载荷、径向载荷和倾覆力矩,去掉方位辅助轴承、过渡外壳和方位过渡轴,方位编码器的外壳通过安装座直接与方位安装盘顶端配合固连,汇流环的内环与方位轴内孔中部预留的安装法兰配合固连;
10.所述方位数据传动部分集成在方位箱体内方位动力传动部分的上方,包括方位编码器、安装座、联轴节、汇流环、过渡盘,汇流环内环下端通过过渡盘安装到方位过渡轴内孔下部的法兰上,方位编码器的转轴通过联轴节与汇流环内环上端同轴配合连接,过渡盘、汇流环内环、方位编码器的转轴通过方位过渡轴与方位轴同轴配合连接,不旋转,安装座安装在过渡外壳的上方,安装座的下端法兰与过渡外壳顶端配合紧固连接,方位编码器布置在安装座的上方,方位编码器的外壳与安装座的上端紧固连接,汇流环的外环上端设置拨叉装入安装座内相应的拨叉孔,方位编码器的外壳、安装座、汇流环外环随过渡外壳和方位安装盘旋转,方位编码器通过其外壳与转轴相对旋转输出方位角度信号,实现方位数据传动,汇流环外环相对其内环旋转,完成转台电气信号在方位从不旋转到旋转的转接;
11.所述俯仰动力传动部分集成在方位箱体内的上部右侧空间,包括俯仰电机、俯仰减速器、俯仰偏心套、俯仰动力轴承、俯仰动力轴、俯仰大齿轮、俯仰小齿轮、减速器安装座,所述俯仰动力轴承装入方位箱体右侧壁的俯仰动力轴承安装孔内,俯仰动力轴承的外圈与俯仰动力轴承安装孔配合,所述俯仰动力轴装入俯仰动力轴承的内圈,俯仰动力轴承的内圈相对外圈旋转,俯仰动力轴通过俯仰动力轴承与方位箱体动连接,俯仰动力轴的一端在方位箱体的内部与俯仰大齿轮配合紧固连接,另一端伸出方位箱体与右俯仰臂配合紧固连接,所述减速器安装座固定在方位箱体的右侧壁内、俯仰动力轴承安装孔的侧下方,所述俯仰减速器通过俯仰偏心套配合紧固安装在减速器安装座上,所述俯仰减速器的左侧输入端安装俯仰电机,右侧输出旋转轴安装俯仰小齿轮,所述俯仰小齿轮与俯仰大齿轮啮合,由俯仰电机驱动俯仰减速器的输出旋转轴和俯仰小齿轮旋转,从而带动俯仰大齿轮、俯仰动力轴和右俯仰臂相对方位箱体旋转,实现俯仰动力传动;
12.所述俯仰数据传动部分集成在方位箱体的上部左侧空间,包括俯仰数据轴、俯仰数据轴承、过渡轴、安装座、联轴节、俯仰编码器,所述安装座固定在方位箱体左侧壁的内侧,所述俯仰编码器固定在安装座上,所述俯仰数据轴承装入方位箱体左侧壁的俯仰数据轴承安装孔内,轴承的外圈与俯仰数据轴承安装孔配合,俯仰数据轴装入俯仰数据轴承的内圈,俯仰数据轴承的内圈相对外圈旋转,俯仰数据轴通过所述俯仰数据轴承与方位箱体动连接,俯仰数据轴左端在方位箱体的外面与左俯仰臂配合紧固连接,右端在方位箱体的内部与过渡轴的左端配合紧固连接,俯仰编码器的转轴通过联轴节与过渡轴的右端同轴配合连接,左俯仰臂通过顶部连接板与右俯仰臂固连,当俯仰动力轴带动右俯仰臂旋转时,通过顶部连接板带动左俯仰臂、俯仰数据轴和俯仰编码器的转轴相对方位箱体旋转,俯仰编码器通过其转轴与外壳相对旋转输出俯仰角度信号,实现俯仰数据传动。
13.所述伺服控制系统用于接收处理上位机的指令信号、方位编码器的方位角度信号和俯仰编码器的俯仰角度信号,并控制方位电机和俯仰电机旋转,从而驱动方位动力传动部分、方位数据传动部分和俯仰动力传动部分、俯仰数据传动部分相应旋转,实现转台方位和俯仰按照上位机的指令完成相应的转动功能。
14.本发明与现有技术相比,其显著优点为:
15.(1)集成化程度高,结构紧凑,体积小:本发明中方位、俯仰动力和数据传动、伺服
控制系统、汇流环均集成在方位箱体内,方位采用外壳(箱体)旋转而轴不转的结构形式,转台左右侧和顶部均可安装负载,而且左右俯仰臂及顶部连接板均与负载一体化集成设计,通过集成设计大大减小体积,结构紧凑;
16.(2)通用性强:本发明根据负载对方位倾覆力矩的大小来确定是否选配方位辅助轴承,适应不同的应用场合,通用性好;方位箱体及其毛坯为通用设计,可在一定范围内适应不同的方位和俯仰传动比,并适应不同的俯仰限位角度;而且方位电机、减速器及偏心套、小齿轮、编码器及联轴节等和俯仰通用;另外基座主体也为通用设计。
17.下面结合附图对本发明做进一步详细的描述。
附图说明
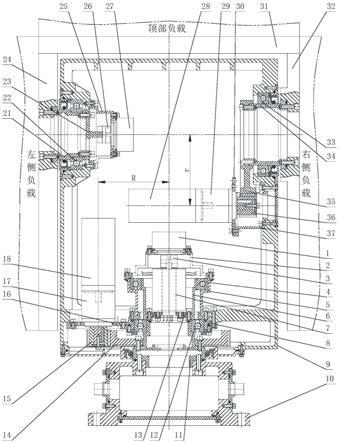
18.图1是本发明的主剖视图。
19.图2是本发明的装配侧剖视图。
20.图3是转台不选用方位辅助轴承的装配侧剖视图。
21.图4是方位安装盘剖视图。
22.图5是方位安装盘俯视图。
23.图6是方位箱体的正剖视图。
24.图7是方位箱体的侧剖视图。
25.图8是方位箱体右侧安装俯仰限位挡块示意图。
26.其中:
[0027]1‑
方位编码器,2
‑
安装座,3
‑
联轴节,4
‑
方位辅助轴承,5
‑
过渡外壳,6
‑ꢀ
方位过渡轴,7
‑
汇流环,
[0028]8‑
方位安装盘,8
‑1‑
方位减速器安装孔,8
‑2‑
方位轴承安装孔,8
‑3‑
方位安装盘定位面,8
‑4‑
方位安装盘定位圆,8
‑5‑
方位安装盘顶端面,8
‑6‑
方位安装盘顶端定位圆,
[0029]9‑
方位箱体,9
‑1‑
俯仰动力轴承安装孔,9
‑2‑
俯仰减速器安装孔,9
‑3‑
方位箱体下部定位面,9
‑4‑
方位箱体下部定位孔,9
‑5‑
俯仰数据轴承安装孔,
[0030]
10
‑
基座,10
‑1‑
基座主体,10
‑2‑
基座侧盖板,10
‑3‑
转接插座,
[0031]
11
‑
方位轴,12
‑
方位主轴承,13
‑
过渡盘,14
‑
方位大齿轮,15
‑
方位小齿轮, 16
‑
方位偏心套,17
‑
方位减速器,18
‑
方位电机,19
‑
方位前侧盖,20
‑
伺服控制系统,21
‑
俯仰数据轴,22
‑
俯仰数据轴承,23
‑
过渡轴,24
‑
左俯仰臂,25
‑
安装座,26
‑
联轴节,27
‑
俯仰编码器,28
‑
俯仰电机,29
‑
俯仰减速器,30
‑
俯仰偏心套,31
‑
连接板,32
‑
右俯仰臂,33
‑
俯仰动力轴承,34
‑
俯仰动力轴,35
‑
俯仰大齿轮,36
‑
俯仰小齿轮,37
‑
减速器安装座,38
‑
方位后侧盖,39
‑
伺服控制系统, 40
‑
俯仰限位挡块,41
‑
俯仰限位挡块。
具体实施方式
[0032]
一种集成化通用型方位俯仰两轴转台,由基座10、方位箱体9、方位动力传动部分、方位数据传动部分、俯仰动力传动部分、俯仰数据传动部分、左俯仰臂 24、右俯仰臂32、伺服控制系统组成,其中方位动力传动部分、方位数据传动部分、俯仰动力传动部分、俯仰数据传动部分、伺服控制系统均集成在方位箱体 9内。
[0033]
如图1、2、3所示,基座10在转台的最下部,承载整部转台,并作为转台的安装接口;
[0034]
如图1、2、3、4、5、6、7所示,所述方位动力传动部分集成安装在方位箱体9内的下部空间,由方位电机18、方位减速器17、方位偏心套16、方位小齿轮15、方位大齿轮14、方位主轴承12、方位轴11、方位安装盘8组成;所述方位轴11安装到基座10的顶端,方位轴11的下端与基座10的顶端配合紧固连接;方位安装盘定位圆8
‑
4与方位箱体下部定位孔9
‑
4配合、方位安装盘定位面8
‑
3 与方位箱体下部定位面9
‑
3贴合紧固连接;在方位安装盘8与方位轴11的上端间设置方位主轴承12,方位主轴承12装入方位安装盘8上的方位轴承安装孔 8
‑
2,该主轴承12的外圈与方位轴承安装孔8
‑
2配合,方位轴11上端装入方位主轴承12内圈内,方位主轴承12外圈相对内圈旋转,方位安装盘8通过该方位主轴承12与方位轴11动连接;方位大齿轮14在方位主轴承12和方位安装盘8 的下方与方位轴11配合紧固连接,方位大齿轮14、方位轴11和基座10不旋转;方位减速器17通过方位偏心套16安装到方位安装盘8上的方位减速器安装孔 8
‑
1内,该方位减速器17的顶部输入端安装方位电机18,底部输出旋转轴安装方位小齿轮15,该方位小齿轮15与方位大齿轮14啮合,由方位电机18驱动方位减速器17的输出旋转轴和方位小齿轮15旋转,从而带动方位安装盘8和方位箱体9绕方位大齿轮14和方位轴11旋转,实现箱体旋转而轴不转的方位动力传动方式。
[0035]
如图1、2所示,方位安装盘8的顶端安装过渡外壳5,过渡外壳5的下端孔与方位安装盘顶端定位圆8
‑
6配合、过渡外壳5的底端面与方位安装盘顶端面 8
‑
5贴合紧固连接,方位辅助轴承4装入过渡外壳5上端的轴承安装孔,该辅助轴承4的外圈与过渡外壳5上的轴承安装孔配合,过渡外壳5、方位辅助轴承4 的外圈随方位安装盘8旋转;方位轴11的顶端安装方位过渡轴6,方位过渡轴6 的底端与方位轴11的顶端配合紧固连接,方位过渡轴6的上端装入方位辅助轴承4的内圈内,方位轴11、方位过渡轴6、方位辅助轴承4的内圈不旋转;所述方位主轴承12选用能同时承受轴向载荷、径向载荷和倾覆力矩的轴承,比如四点接触球轴承,采用方位主轴承12和方位辅助轴承4的轴承组合方式,由方位主轴承12同时承受轴向载荷和径向载荷、方位辅助轴承4承受径向载荷来承受较大的方位倾覆力矩,应用于方位倾覆力矩大的负载条件。
[0036]
如图1、2所示,所述方位数据传动部分集成在方位箱体9内方位动力传动部分的上方,由方位编码器1、安装座2、联轴节3、汇流环7、过渡盘13组成;汇流环7内环下端通过过渡盘13安装到方位过渡轴6内孔下部的法兰上,方位编码器1的转轴通过联轴节3与汇流环7内环上端同轴配合连接,过渡盘13、汇流环7内环、方位编码器1的转轴通过方位过渡轴6与方位轴11同轴配合连接,不旋转;安装座2安装到过渡外壳5的上方,该安装座2的下端法兰与过渡外壳5顶端配合紧固连接,方位编码器1布置在安装座2的上方,方位编码器1 的外壳与安装座2的上端紧固连接,汇流环7的外环上端设置拨叉装入安装座2 内相应的拨叉孔,方位编码器1的外壳、安装座2、汇流环7外环随过渡外壳5 和方位安装盘8旋转;方位编码器1通过其外壳与转轴相对旋转输出方位角度信号,实现方位数据传动,汇流环7外环相对其内环旋转,完成转台电气信号在方位从不旋转到旋转的转接。
[0037]
如图1、2所示,所述俯仰动力传动部分集成在方位箱体9内的上部右侧空间,由俯仰电机28、俯仰减速器29、俯仰偏心套30、俯仰动力轴承33、俯仰动力轴34、俯仰大齿轮35、俯仰小齿轮36、减速器安装座37组成;俯仰动力轴承33装入方位箱体9右侧壁的俯仰动力轴承安装孔9
‑
1内,该轴承33的的外圈与俯仰动力轴承安装孔9
‑
1配合,俯仰动力轴34装入俯仰动力轴承33的内圈,俯仰动力轴承33的内圈相对外圈旋转,俯仰动力轴34通过该俯仰动
力轴承33 与方位箱体9动连接;俯仰动力轴34左端在方位箱体9的内部与俯仰大齿轮35 配合紧固连接,其右端在方位箱体9的外面与右俯仰臂32配合紧固连接;在方位箱体9的右侧壁内、俯仰动力轴承安装孔9
‑
1的侧下方设置俯仰减速器安装孔 9
‑
2,减速器安装座37的右端与该安装孔9
‑
2配合安装,减速器安装座37的左端通过俯仰偏心套30配合紧固安装俯仰减速器29,该俯仰减速器29的左侧输入端安装俯仰电机28,右侧输出旋转轴安装俯仰小齿轮36,该俯仰小齿轮36 与俯仰大齿轮35啮合,由俯仰电机28驱动俯仰减速器29的输出旋转轴和俯仰小齿轮36旋转,从而带动俯仰大齿轮35、俯仰动力轴34和右俯仰臂相对方位箱体9旋转,实现俯仰动力传动。
[0038]
如图1所示,所述俯仰数据传动部分集成在方位箱体9的上部左侧空间,由俯仰数据轴21、俯仰数据轴承22、过渡轴23、安装座25、联轴节26、俯仰编码器27组成;在俯仰编码器27与方位箱体9间设置安装座25,安装座25的左端与方位箱体9左侧壁的内侧配合紧固连接,右端与俯仰编码器27的外壳配合紧固连接,俯仰编码器27的外壳、安装座25相对方位箱体9不旋转;俯仰数据轴承22装入方位箱体9左侧壁的俯仰数据轴承安装孔9
‑
5内,轴承22的外圈与俯仰数据轴承安装孔9
‑
5配合,俯仰数据轴21装入俯仰数据轴承22的内圈,俯仰数据轴承22的内圈相对外圈旋转,俯仰数据轴21通过该俯仰数据轴承22与方位箱体9动连接;俯仰数据轴21左端在方位箱体9的外面与左俯仰臂24配合紧固连接,右端在方位箱体9的内部与过渡轴23的左端配合紧固连接,俯仰编码器27的转轴通过联轴节26与过渡轴23的右端同轴配合连接;左俯仰臂24 通过顶部连接板31与右俯仰臂32固连,当俯仰动力轴34带动右俯仰臂32旋转时,通过顶部连接板31带动左俯仰臂24、俯仰数据轴21和俯仰编码器27的转轴相对方位箱体9旋转,俯仰编码器27通过其转轴与外壳相对旋转输出俯仰角度信号,实现俯仰数据传动。
[0039]
所述伺服控制系统用于接收处理上位机的指令信号、方位编码器(1)的方位角度信号和俯仰编码器(27)的俯仰角度信号,并控制方位电机(18)和俯仰电机(28)旋转,从而驱动方位动力传动部分、方位数据传动部分和俯仰动力传动部分、俯仰数据传动部分相应旋转,实现转台方位和俯仰按照上位机的指令完成相应的转动功能。
[0040]
如图1所示,左俯仰臂24、右俯仰臂32和顶部连接板31分别安装左侧负载、右侧负载和顶部负载,而且均可与相应负载一体化集成设计。
[0041]
如图2所示,在方位箱体9的前侧和后侧分别安装方位前侧盖19和方位后侧盖38,方位前侧盖19内部可以集成安装伺服控制系统的方位电机驱动器和俯仰电机驱动器20,方位后侧盖38内部可以集成安装伺服控制系统的电源和控制板39等,进一步集成设计。
[0042]
如图3所示,在方位倾覆力矩较小的负载条件下,方位仅采用方位主轴承 12,由该主轴承12同时承受轴向载荷、径向载荷和倾覆力矩,去掉方位辅助轴承4、过渡外壳5和方位过渡轴6,方位编码器1的外壳通过安装座2直接与方位安装盘8顶端配合固连,汇流环7的内环与方位轴11内孔中部预留的安装法兰配合固连。通过是否选配方位辅助轴承4适应不同的负载条件,扩大应用场合,提高通用性。
[0043]
如图1、4、5、6、7所示,方位箱体9设置方位安装盘8,一方面,方位箱体9内部方位箱体下部定位面9
‑
3朝向下部外侧,方便加工,解决了加工工艺性,另一方面,当方位大齿轮14和方位小齿轮15传动比调整设计时,仅需对方位安装盘8上方位减速器安装孔8
‑
1与方位轴承安装孔8
‑
2间的中心距r进行调整设计,方位箱体9及转台其余零部件均可通用。
[0044]
如图1、2、6、7、8所示,方位箱体9右侧俯仰动力轴承安装孔9
‑
1周边均加厚设计,当俯仰大齿轮35和俯仰小齿轮36传动比调整设计时,仅需对方位箱体9上俯仰减速器安装孔9
‑
2与俯仰动力轴承安装孔9
‑
1间的中心距r进行调整设计;俯仰减速器安装角度β也可以根据需要调整设计;另外可以根据不同俯仰角度需要调整俯仰限位挡块40、41的安装位置,方位箱体9毛坯及转台其余零部件均可通用。
[0045]
在基座10的主体10
‑
1四侧设置基座侧盖板10
‑
2,在基座侧盖板10
‑
2上根据需要设计转接插座10
‑
3,完成转台对外的电气信号转接功能,基座主体10
‑
1 通用设计。
[0046]
所述方位电机18和俯仰电机28通用,方位减速器17和俯仰减速器29通用,方位偏心套16和俯仰偏心套30通用,方位小齿轮15和俯仰小齿轮36通用,方位编码器1及联轴节3分别和俯仰编码器27及联轴节26通用,进一步提高通用性。
[0047]
通过系列集成化设计,减小体积,结构紧凑。可以根据负载对方位倾覆力矩的大小来确定是否选配方位辅助轴承,适应不同的应用场合;方位箱体设置方位安装盘,一方面解决了方位箱体的加工工艺性,另一方面,当方位末级齿轮副传动比调整设计时,仅需对方位安装盘局部进行调整设计,方位箱体及转台其余零部件均可通用;方位箱体毛坯也适应不同的俯仰传动比和不同的俯仰限位角度,而且方位电机、减速器及偏心套、小齿轮、编码器及联轴节等和俯仰通用,另外基座主体也通用设计,通用性强。
[0048]
左俯仰臂24、右俯仰臂32和顶部连接板31分别安装左侧负载、右侧负载和顶部负载,而且均可与相应负载一体化集成设计。
[0049]
实施例
[0050]
一种集成化通用型方位俯仰两轴转台,由基座10、方位箱体9、方位动力传动部分、方位数据传动部分、俯仰动力传动部分、俯仰数据传动部分、左俯仰臂 24、右俯仰臂32、伺服控制系统组成,其中方位动力传动部分、方位数据传动部分、俯仰动力传动部分、俯仰数据传动部分、伺服控制系统均集成在方位箱体 9内;所述方位箱体9设置在基座10上,承载整部转台,并作为转台的安装接口;
[0051]
所述方位动力传动部分集成安装在方位箱体9内的下部空间,由方位电机 18、方位减速器17、方位偏心套16、方位小齿轮15、方位大齿轮14、方位主轴承12、方位轴11、方位安装盘8组成,所述方位轴11安装到基座10的顶端,方位轴11的下端与基座10的顶端配合紧固连接,方位安装盘定位圆8
‑
4与方位箱体下部定位孔9
‑
4配合、方位安装盘定位面8
‑
3与方位箱体下部定位面9
‑
3 贴合紧固连接,在方位安装盘8与方位轴11的上端间设置方位主轴承12,方位主轴承12装入方位安装盘8上的方位轴承安装孔8
‑
2,该主轴承12的外圈与方位轴承安装孔8
‑
2配合,方位轴11上端装入方位主轴承12内圈内,方位主轴承 12外圈相对内圈旋转,方位安装盘8通过该方位主轴承12与方位轴11动连接,方位大齿轮14在方位主轴承12和方位安装盘8的下方与方位轴11配合紧固连接,方位大齿轮14、方位轴11和基座10不旋转,方位减速器17通过方位偏心套16安装到方位安装盘8上的方位减速器安装孔8
‑
1内,该方位减速器17的顶部输入端安装方位电机18,底部输出旋转轴安装方位小齿轮15,该方位小齿轮 15与方位大齿轮14啮合,由方位电机18驱动方位减速器17的输出旋转轴和方位小齿轮15旋转,从而带动方位安装盘8和方位箱体9绕方位大齿轮14和方位轴11旋转,实现箱体旋转而轴不转的方位动力传动方式;方位安装盘8的顶端安装过渡外壳5,过渡外壳5的下端孔与方位安装盘顶端定位圆8
‑
6配合、过渡外壳5的底端面与方位安装盘顶端面8
‑
5贴合
紧固连接,方位辅助轴承4装入过渡外壳5上端的轴承安装孔,该辅助轴承4的外圈与过渡外壳5上的轴承安装孔配合,过渡外壳5、方位辅助轴承4的外圈随方位安装盘8旋转,方位轴11的顶端安装方位过渡轴6,方位过渡轴6的底端与方位轴11的顶端配合紧固连接,方位过渡轴6的上端装入方位辅助轴承4的内圈内,方位轴11、方位过渡轴6、方位辅助轴承4的内圈不旋转;
[0052]
所述方位数据传动部分集成在方位箱体9内方位动力传动部分的上方,由方位编码器1、安装座2、联轴节3、汇流环7、过渡盘13组成,汇流环7内环下端通过过渡盘13安装到方位过渡轴6内孔下部的法兰上,方位编码器1的转轴通过联轴节3与汇流环7内环上端同轴配合连接,过渡盘13、汇流环7内环、方位编码器1的转轴通过方位过渡轴6与方位轴11同轴配合连接,不旋转,安装座2安装到过渡外壳5的上方,该安装座2的下端法兰与过渡外壳5顶端配合紧固连接,方位编码器1布置在安装座2的上方,方位编码器1的外壳与安装座 2的上端紧固连接,汇流环7的外环上端设置拨叉装入安装座2内相应的拨叉孔,方位编码器1的外壳、安装座2、汇流环7外环随过渡外壳5和方位安装盘8旋转,方位编码器1通过其外壳与转轴相对旋转输出方位角度信号,实现方位数据传动,汇流环7外环相对其内环旋转,完成转台电气信号在方位从不旋转到旋转的转接;
[0053]
所述俯仰动力传动部分集成在方位箱体9内的上部右侧空间,由俯仰电机 28、俯仰减速器29、俯仰偏心套30、俯仰动力轴承33、俯仰动力轴34、俯仰大齿轮35、俯仰小齿轮36、减速器安装座37组成,俯仰动力轴承33装入方位箱体9右侧壁的俯仰动力轴承安装孔9
‑
1内,该轴承33的的外圈与俯仰动力轴承安装孔9
‑
1配合,俯仰动力轴34装入俯仰动力轴承33的内圈,俯仰动力轴承 33的内圈相对外圈旋转,俯仰动力轴34通过该俯仰动力轴承33与方位箱体9 动连接,俯仰动力轴34左端在方位箱体9的内部与俯仰大齿轮35配合紧固连接,其右端在方位箱体9的外面与右俯仰臂32配合紧固连接,在方位箱体9的右侧壁内、俯仰动力轴承安装孔9
‑
1的侧下方设置俯仰减速器安装孔9
‑
2,减速器安装座37的右端与该安装孔9
‑
2配合安装,减速器安装座37的左端通过俯仰偏心套30配合紧固安装俯仰减速器29,该俯仰减速器29的左侧输入端安装俯仰电机28,右侧输出旋转轴安装俯仰小齿轮36,该俯仰小齿轮36与俯仰大齿轮35 啮合,由俯仰电机28驱动俯仰减速器29的输出旋转轴和俯仰小齿轮36旋转,从而带动俯仰大齿轮35、俯仰动力轴34和右俯仰臂相对方位箱体9旋转,实现俯仰动力传动;
[0054]
所述俯仰数据传动部分集成在方位箱体9的上部左侧空间,由俯仰数据轴 21、俯仰数据轴承22、过渡轴23、安装座25、联轴节26、俯仰编码器27组成,在俯仰编码器27与方位箱体9间设置安装座25,安装座25的左端与方位箱体9 左侧壁的内侧配合紧固连接,右端与俯仰编码器27的外壳配合紧固连接,俯仰编码器27的外壳、安装座25相对方位箱体9不旋转,俯仰数据轴承22装入方位箱体9左侧壁的俯仰数据轴承安装孔9
‑
5内,轴承22的外圈与俯仰数据轴承安装孔9
‑
5配合,俯仰数据轴21装入俯仰数据轴承22的内圈,俯仰数据轴承 22的内圈相对外圈旋转,俯仰数据轴21通过该俯仰数据轴承22与方位箱体9 动连接,俯仰数据轴21左端在方位箱体9的外面与左俯仰臂24配合紧固连接,右端在方位箱体9的内部与过渡轴23的左端配合紧固连接,俯仰编码器27的转轴通过联轴节26与过渡轴23的右端同轴配合连接,左俯仰臂24通过顶部连接板31与右俯仰臂32固连,当俯仰动力轴34带动右俯仰臂32旋转时,通过顶部连接板31带动左俯仰臂24、俯仰数据轴21和俯仰编码器27的转轴相
对方位箱体9旋转,俯仰编码器27通过其转轴与外壳相对旋转输出俯仰角度信号,实现俯仰数据传动。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

