1.本发明属于智能驾驶车辆技术领域,具体涉及一种基于无人机的智能驾驶车队编队支持系统及方法。
背景技术:
2.智能驾驶技术中,车辆通过安装在自身的或其它设备上的毫米波雷达,摄像头等感知传感器探测周围路况,经由智能驾驶处理器运算,控制车辆保持在车道行驶,并躲避障碍物。目前智能驾驶在商用车领域应用速度快速增高,因为编队智能驾驶可以大幅减少驾驶员工作量和车队危险,经济效益较高。
3.为了扩大单台车辆的感知范围,部分技术通过释放带摄像头的无人机扩大智能驾驶捕获到的的输入图像,并通过无人机和本车之间传输数据,改善本车驾驶决策。例如cn106878673 a、cn210363547u等。但无人机悬空位置不稳定,且传输的图像和点云信息如果要和本车感知信息融合需要占用本车大量的计算资源,且时延较高。在编队行驶时,每辆车装备高配置无人机,还需要做无人机视觉或点云信息融合,计算开销过大。
4.在有些车队编队行驶的场景中还会引入c
‑
v2x,dsrc等进行车车通信,保持队形并减少运输过程中的油耗和事故。大部分偏远高速和城市间的国道通信基础设施较差,难以保持蜂窝网络信号质量,将影响依靠基站和路侧设备的车辆通讯质量。而dsrc由于距离限制,当间隔超过一定距离时将断开连接。
技术实现要素:
5.本发明的目的是针对上述技术问题,对于车队编队支持系统,提供一种在没有网络或者网络延迟较高的偏远地带启用基于无人机的智能驾驶车队编队支持系统及方法,车辆只需要维持acc等基础智能驾驶功能就可以保持车队间距,降低了车队成型的数据计算成本。
6.实现本发明目的之一的基于无人机的智能驾驶车队编队支持的方法的技术方案为:根据车与车的间距、车与无人机的间距或者无人机与无人机的间距判断是否需要通信支持;车辆释放无人机作为传输信号的中继站,支持两车间的通信;车队的主控车辆对车队行进速度进行调整以缩小落后车辆与前车的间距;当车与车的间距减小到设定距离内,无人机回到所在车辆。
7.本发明方案优选在没有网络或者网络延迟较高的偏远地带启用,通过雷达或其它设备判断两相邻车的间距,或者车与相邻无人机之间的间距,或者两相邻车之间的相邻无人机之间的间距,如果大于设定距离则释放无人机用作信号中继,以保持两车间的通信。所述设定距离根据直接通信方案协议及端口可支持的最大传输距离不同,直接通信方案包括但不限于drsc、蓝牙、pc5等。
8.进一步的技术方案包括:当车与车的间距或者车与无人机的间距或者无人机与无人机的间距大于等于设定距离,由落后车辆或前车释放无人机到两车之间支持通信;当落
后车辆或前车没有无人机可释放时,车队内的其它车辆释放无人机支持两车之间的通信。
9.当两相邻车之间的距离大于设定距离,记此距离为s1,且两车之间没有无人机时,则由落后车辆或前车释放无人机到两车之间支持通信,无人机优选保持在两车间的中点位置,以使通信范围最大,此时两车间的通信距离则扩大为2s1;如果两相邻车之间已有无人机支持通信,且两邻车间的距离继续扩大到设定距离s2,或者相邻两车之间相邻无人机间的距离大于s1,或者落后车辆与前面相邻的无人机之间的距离大于s1,或者落后车辆的相邻前车与此相邻前车后面相邻的无人机之间的距离大于s1,则由落后车辆或相邻前车在车队内发送通信请求支持的报文,车队内的车辆收到报文后,由最先回复报文且载有无人机的车辆释放无人机到落后车辆与前车之间作为信号中继,保持两车之间的通信。所述设定距离s2大于前述设定距离s1。
10.进一步的技术方案包括:车队中包括一台主控车辆,用于对车队内所有车辆行进速度的调整。
11.车队中选取一辆车作为主控车辆,当车队内相邻车辆间的距离大于设定距离时,结合当前车辆的实时位置和道路限速速度等,实时调整落后车辆及其后车的速度,以使车辆间的距离恢复到设定距离内。
12.进一步的技术方案包括:当相邻两车间的无人机的数量多于设定数量时,对车队行进速度进行整体调整以缩小落后车辆与前车的距离。
13.当相邻两车间的无人机的数量多于设定数量时,主控车辆根据车辆的实时位置、当前车队的整体速度以及道路限速等,对领先车队或者落后车队的速度进行调整,缩小落后车辆与前车的距离。当距离恢复到设定范围内后,无人机回到所属车辆。
14.进一步的技术方案包括:车队识别到落后车辆和前车之间有其他车队的车辆插入,且在标定时间内落后车队与前车的距离没有缩小到设定距离内,将通过多媒体功能与落后车辆联络。
15.当车辆识别到有非本车队的其它车辆插入时,导致在标定时间内落后车队与前车的距离没有缩小到设定距离内,则主控车辆智能驾驶处理模块将打开视屏或语音通信等多媒体功能,通过无人机传输与落后车辆联络。
16.实现本发明目的之二的基于无人机的智能驾驶车队编队支持的系统的技术方案为:包括无线通信模块:用于车辆与车辆之间或者车辆与无人机之间或者无人机与无人机之间传输数据;智能驾驶处理模块:用于接受来自无线通信模块的信息,结合车辆的驾驶状况控制车辆行驶;无人机模块:用于控制车载无人机的释放、接收及充电。
17.进一步的技术方案为:所述智能驾驶处理模块,还包括:
18.间距控制模块:用于判断及控制车队内相邻两辆车的车间距离或者车与无人机之间的距离;
19.计算规划模块:用于计算并分配车队内车辆的车速;
20.指令处理模块:用于向车队发送指令及处理车队内其它车辆发送的指令。
21.进一步的技术方案为:所述无人机模块还包括智能驾驶辅助模块,用于探测两车的间距,自行运算后车需要的追赶速度。
22.当无人机悬停在落后车辆与前车之间时,如果没有插入车辆阻碍,根据无人机在两车间隙之间探测到的间距大小,自行运算后车需要的追赶速度。
23.进一步的技术方案为:所述智能驾驶处理模块还包括无人机控制模块,用于调整无人机的位置,使每台无人机始终处于前后两相邻车辆之间的均分位。
24.当两相邻车之间只有一台无人机时,无人机处于两相邻车的中点位置,可扩大两相邻车间通讯范围到最大;当两相邻车之间有两台无人机时,假设落后车辆与无人机a相邻,无人机与无人机b相邻,无人机b与前车相邻,记落后车辆与无人机a之间的距离为s
a
,无人机a与无人机b之间的距离记为s
ab
,无人机b与前车的距离记为s
b
,此时s
a
=s
ab
=s
b
。依此类推,每台无人机处于前后相邻无人机的中点位置,或者处于相邻车辆与相邻无人机的中点位置,使两相邻车间的通讯范围保持最大。
25.进一步的技术方案为:所述计算规划模块装载在主控车辆,获取每辆车的实时位置,重新计算各车车速以使落后车辆与前车距离恢复到设定范围内。
26.本发明可以使自动驾驶车队内部车辆与车辆之间在没有蜂窝网络的偏远地段维持远距离高质量通信。通过无人机辅助智能驾驶车队编队行驶,无人机传递主控车辆行驶决策,使得车队内车辆只需要维持acc等基础智能驾驶功能就可以保持车队间距,降低车队成型的数据计算成本。
附图说明
27.图1为本发明所述的一台无人机辅助驾驶的示意图;
28.图2为本发明所述的多台无人机辅助驾驶的示意图;
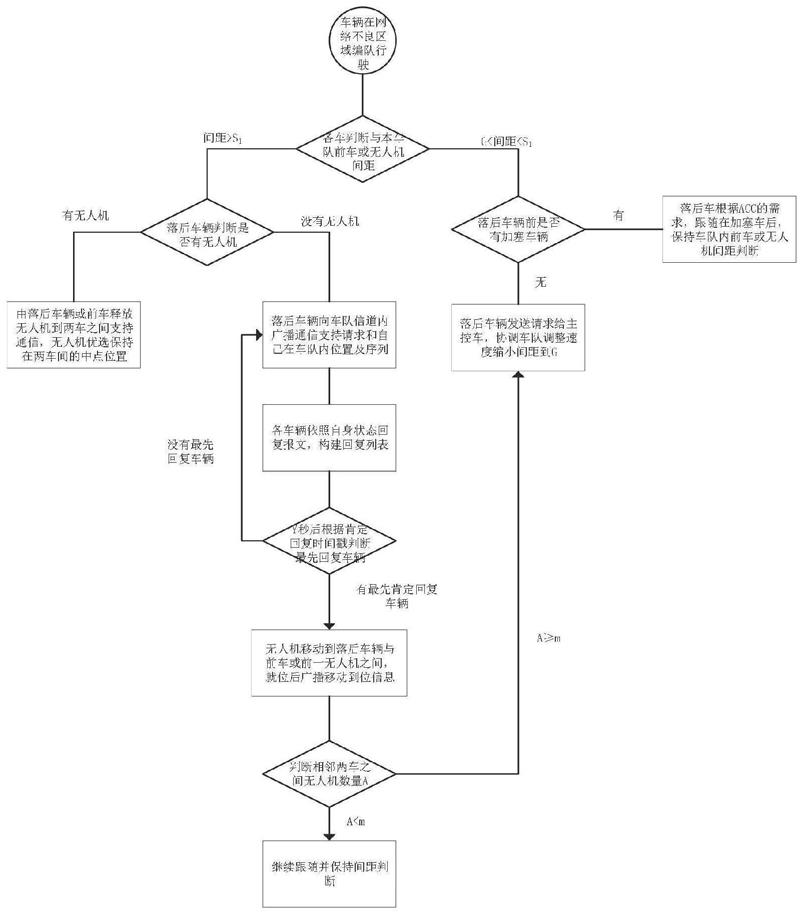
29.图3为本发明所述的流程示意图。
具体实施方式
30.下列具体实施方式用于对本发明权利要求技术方案的解释,以便本领域的技术人员理解本权利要求书。本发明的保护范围不限于下列具体的实施结构。本领域的技术人员做出的包含有本发明权利要求书技术方案而不同于下列具体实施方式的也是本发明的保护范围。
31.实施中,车队中的每台车装备,包括以下部分:智能驾驶处理模块,即原本智能驾驶车辆的控制器,包括独立控制器、摄像头、雷达等,接受来自无线通信模块的信息,与车辆的加减速、横向变化策略结合,控制车辆行驶;无线通信模块,可采用pc5、drsc、蓝牙等通信协议,与车队其它车辆或无人机通信,传输或接收数据;无人机模块,车载无人机可装备在车顶或者其他部位,可释放及接收无人机,在接收无人机后可对无人机进行充电;无人机进行车辆通信的信号中继。
32.实施例中,距离设定有一个阈值s1,当两车间的距离大于等于设定距离s1时,且两车间没有无人机进行中继通信时,两车中任一车辆启动所载无人机用于支持车间通信。根据直接通信方案协议及端口可支持的最大传输距离不同,s1选定不同的值,直接通信方案包括但不限于drsc、蓝牙、pc5等;实际例中设定距离s1为200m。当两相邻车间有无人机作为中继通信时,此时判断落后车辆与前面相邻无人机之间的距离s2,或者判断落后车辆的相邻前车与此相邻前车后面相邻无人机之间的距离s2,或者判断落后车辆与其相邻前车之间的相邻无人机之间的距离s2,当所述距离s2大于等于设定距离s1时,落后车辆或者其相邻前车发送通信请求支持。
33.当智能驾驶车辆编队行驶到信号不良区域,车辆a与相邻车辆b之间间距s≥200m时,落后车辆a释放无人机,并始终保持在和相邻前车b之间中点的位置以中转信号,提高通信质量,如图1所示,因此其可将两车间最远通信距离扩大为400m。
34.两车之间有一台无人机作信号中继时,如果两车之间的距离继续拉大,当落后车辆a与相邻前车b距离大于400m,落后车辆a向车队信道内广播通信支持请求和自己在车队内位置及序列;各车辆通过毫米波雷达判断各自与前车的距离s,距离s在200m以内并且自车载有无人机时,即在车队内广播包含回应的支持请求报文id的肯定回复。
35.每台车在接收到肯定回复报文后更新车队内各车辆的回复时间列表,在请求报文时间戳的y秒后比较回复时间,最先回复的车辆释放无人机,其中y秒可自行预先设定。
36.依据落后车辆a实时位置和车队内序号,无人机移动到落后车辆a释放的无人机与相邻前车b之间,无人机就位后广播移动到位信息。无人机控制模块以固定频率与无人机及车辆进行通信,对两相邻车之间的无人机进行调整,使每台无人机处于前后两相邻车辆之间的均分位。
37.若y秒后没有任何肯定回复报文,则落后车辆再次广播发送通信支持请求和自己在车队内位置及序列。
38.若两车的间距继续扩大,则重复上述步骤,两车通信能力最大可扩大到(n 1)*200米,其中n为无人机的数量。
39.两相邻车之间无人机数量为m(m>1)时,落后车辆智能驾驶处理模块持续在车队内发送间距调整请求、本车实时位置和间隙中是否有其他车辆,其它车辆接收后依次在车队内转发,直至主控车辆获取请求。主控车辆根据每辆车的gps实时位置,重新分配各车车速,直到落后车辆与其相邻前车恢复到200m以内。同时,随着落后车辆与相邻前车两车距离逐步缩小时,两车间的无人机依次返回原本装备的车辆。
40.上面所述的三类通信报文中,优先级如下:通信支持请求报文的优先级为最高,无人机移动到位报文优先级高于间隙调整请求报文。
41.其中,主控车辆获取间距调整请求信息后,可选的调整方法包括但不限于以下两种:
42.方法一、设当前车队每辆车之间的设定间隙为g(g<200m),领先车辆编队平均速度v1。
43.若落后车辆和前车之间没有其他车辆插入,则保持领先车辆编队按v1继续行驶。落后车辆及其后车加速到v2进行追赶,假设车辆最大制动减速度为a。考虑到安全问题,v2上限按前后车全力制动刹停后能保持2米间隔选取,则(v
22
‑
v
12
)/2a=g 2,所以)/2a=g 2,所以可比较本路段限速,取限速和之间的小值,当车间距恢复到[(v2‑
v1)2/2a1] g后按减速度a1减速至v1,a1根据舒适性可在设计时主观调整。需要注意的是,若v1已经等于限速,则领先车队减速到v1’
(=0.9v1)后,再以v1’
为基准执行落后车队的追赶速度v2。
[0044]
方法二、当无人机悬停在落后车辆与前车之间时,如果没有插入车辆阻碍,根据无人机在两车间隙之间探测到的间距大小,智能驾驶辅助模块自行运算后车需要的追赶速度,发送给后,可比较本路段限速,取限速和之间的小值,当车间距恢复
到[(v2‑
v1)2/2a1] g后按减速度a1减速至v1,a1根据舒适性可在设计时主观调整。
[0045]
若落后车辆和前车之间有其他非车队内的车辆插入时,后车智能驾驶处理模块根据acc的需求,跟随在插入车辆后。如有必要,与车队前车的距离扩大,继续发送通信支持请求。如可支持无人机数量达到上限,则车队头车保持本车道允许的最小速度行驶,领先车队发出的中继无人机保持跟随在领先队列的尾部,直到落后车辆恢复通讯。
[0046]
如果插入的车辆导致落后车队在t(可标定,例如10分钟)时间内仍然没有跟随车队前车到间隙200m以内,头车智能驾驶处理模块将打开视屏或语音通信功能,通过无人机传输与落后车辆联络,人工介入处理。
[0047]
本发明适用于各级自动驾驶车辆,可以是动力电池车辆也可以是燃油车辆。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

